



合成孔径雷达(synthetic aperture radar,SAR)作为一种主动式遥感传感器,具有全天时、全天候的对地观测能力。从影像中获取数字高程模型(digital elevation model,DEM)一直是遥感测绘领域的研究热点,其中雷达干涉测量是其中研究较深、发展前景较好的DEM提取方法。随着搭载平台[1-2]、成像方式、极化方式[3]的多样化,用于DEM提取的SAR数据源愈加丰富:星载SAR数据基于传统干涉测量技术[4]提取DEM,技术成熟,SRTM数据[5]已广泛应用于测绘遥感研究中;机载SAR数据提取DEM一般采用双天线交轨成像形式,能保证主辅影像的强相干性和配准精度[6],通过干涉定标[7-11]恢复出SAR成像精确几何参数后可获得高精度DEM结果;而车载SAR相对于星载和机载而言,系统小型化,拆卸方便,可实现对工程运用的快速响应,在时间和成本上具有明显的优点,因此使用车载SAR数据提取DEM可有效缩短DEM数据更新周期,降低成本。
然而,现今国内外车载SAR相关的研究还集中于车载平台SAR数据的获取过程,如车载SAR雷达体制的研究[12-14]和影像聚焦算法[15-16],只有少量研究涉及使用车载SAR数据进行DEM提取[17],因此对车载SAR数据的DEM提取方法的研究有着重要的意义。
囿于SAR雷达的侧视机制,车载平台往往运行在高架路、桥,堤坝等处,平台高度较低,车载SAR的成像几何与星载和机载有着较大的区别,因此为提高车载SAR的DEM提取精度,车载SAR的相关干涉参数,包括基线长度和倾角、干涉相位和斜距等误差对高程的影响需要进行定量分析。获得SAR相关干涉参数误差的过程称为干涉定标,由于车载SAR的成像范围有限,针对不同测区需要调整雷达的朝向和基线距等,因此车载SAR平台一般为可变结构,干涉定标需要重复进行。现有的干涉定标方法大都依赖于足够的地面控制点[7-9, 11],文献[10]提出基于单控制点的干涉定标方法,但该要求对飞航线、车载平台难以实现。控制点的布设和测量需要耗费较多的人力物力,削弱了车载SAR在时间和成本上的优势,因此在利用控制点信息进行干涉定标以提升DEM精度的同时要减少对控制点数目的依赖。
针对以上问题,本文提出基于单控制点的车载双天线干涉SAR的DEM提取方法,该方法基于一个控制点的精确坐标信息进行相位、斜距和高程改正,并实现高程的迭代求解,无需布设大量控制点进行干涉定标,可有效简化外业工作,实现高精度DEM提取。
1 基于单控制点的车载双天线干涉SAR DEM提取算法 1.1 车载SAR干涉测量原理图 1为车载双天线雷达干涉的几何示意图,其中A1、A2分别为雷达主、辅影像的相位中心,r1、r2分别为A1、A2到地物点P的斜距,B‖,B⊥分别为基线A1A2的水平和垂直分量,α为基线倾角,θ为雷达下视角。则P点相位与高程的关系为
 (1)
(1)

|
| 图 1 车载双天线SAR成像几何关系示意 Fig. 1 Schematic diagram of the geometric relationship of dual-antennas SAR imaging |
式中,λ为雷达波长;h为需要求解的P点高程;H′为参考平面高程;ΔH为两者的相对高程;φ和φ分别为P点真实相位和其在参考平面对应的平地相位;
 (2)
(2)
式中,ε为收敛阈值;每次迭代中φ、H′、B⊥、θ更新,满足收敛条件后,ΔH为微小量,则认为参考平面与P点重合,即h=H′,从而得到P点高程h。
1.2 基于单控制点的DEM提取方法原理由于真实相位φ、斜距r1、基线长度B和基线倾角α等干涉参数存在误差,根据式(2)迭代得到的高程结果存在误差,干涉参数误差可以通过干涉定标的方法得到,但需要布设和测量较多的控制点,耗费较多的人力物力,因此本文提出基于单控制点的DEM提取方法,只需要布设测量一个控制点的地理坐标信息用于相关参数的估计和改正,就可实现高精度DEM提取。
根据图 1的车载SAR正侧视几何关系,可到得到地面点P的高程与干涉参数的关系为
 (3)
(3)
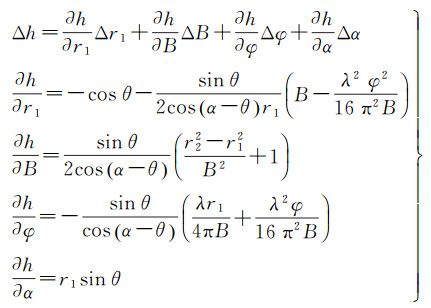
式中,HA1为A1点高程,根据式(3),求解目标高程h对干涉参数的偏微分以分析干涉参数误差对高程的影响,得到
 (4)
(4)
式中,Δr1、ΔB、Δφ、Δα分别为斜距、基线长度、真实相位和基线倾角的误差;Δh为高程误差,根据式(4)计算各干涉参数的敏感度量级见表 1。
| 干涉参数 | 敏感度量级 |
| 基线长度 | 104 |
| 基线倾角 | 103 |
| 真实相位 | 101 |
| 斜距 | 10-1 |
敏感度量级衡量的是干涉参数对高程的影响程度,量级越大,影响程度越大,由表 1可知,基线长度和基线倾角对高程的影响较大,相位和斜距的影响较小。
首先根据控制点对斜距误差Δr1和相位误差Δφ进行精确改正,并对基线长度B和倾角α进行精确估计,斜距改正为
 (5)
(5)
式中,RS、VS、RG、fD分别表示雷达成像中心的位置矢量和速度矢量、地面点的位置矢量和多普勒频率;r为改正前的地面点斜距。R′和r′分别为控制点斜距和地面点改正后的斜距。
相位改正为
 (6)
(6)
式中,RA1M、RA2M分别为控制点在主、辅影像的斜距;φ、φ′分别为控制点真实相位和解缠相位;Ψ、Ψ′分别为地面点的解缠相位和改正后的相位。
基线长度和倾角估计为
 (7)
(7)
式中,RA1和RA2为控制点对应的主辅天线相位中心的位置矢量;HA1、HA2分别为主辅天线相位中心的高程。
进行相位改正、斜距改正和基线长度、倾角的估计后,根据式(2)迭代求解地面点高程h,此时得到的高程h的误差为
 (8)
(8)
式中,δ′为斜距改正和相位改正后的剩余误差, 为微小量,记
 (9)
(9)
式中,HM′、HM分别为控制点的迭代求解高程和真实高程;Θ为控制点对应的成像下视角;h′为改正后的地面点高程。
根据以上讨论,形成的基于单控制点信息的车载双天线干涉SAR的DEM提取算法流程如图 2所示。主要包含以下步骤。

|
| 图 2 本文方法DEM提取流程 Fig. 2 DEM extraction process in this paper |
(1) 数据预处理:包括SAR影像的距离向、方位向滤波,车载平台运行的轨道数据拟合等。
(2) 干涉处理:包括SAR影像配准、干涉相位计算、Goldstein相位滤波[18]以及基于最小费用流的相位解缠[19],得到解缠相位。
(3) 相位与斜距改正,基线估计:根据控制点坐标信息和车载平台轨道信息对解缠相位和斜距进行改正,并对基线长度和倾角进行估计。
(4) DEM求解与高程改正:对地面点高程进行迭代求解,得到初步的DEM结果。并基于控制点进行高程改正,得到最终DEM结果。
2 试验与分析 2.1 仿真试验在上述基于单控制点的车载双天线干涉SAR DEM提取方法的推导过程中,存在较多的近似,因此进行仿真试验,验证该方法的有效性,并评定精度。
随机生成模拟地表,地理区域为30.000 00°—30.511°N,120.000 00°—120.511°E,模拟地表对应的DEM见图 3。

|
| 图 3 模拟地表DEM Fig. 3 DEM of simulated surface |
模拟地表的高程变化范围为0~8 m左右, 根据模拟地表设计车载SAR的轨道,成像的模拟参数见表 2。
| 参数类型 | 参数 | 取值 |
| 成像 平台 参数 |
基线长度/m | 0.2 |
| 基线倾角/(°) | 90 | |
| 雷达波束宽度/(°) | 40 | |
| 车载平台高程/m | 20 | |
| 影像 数据 参数 |
波长/m | 0.02 |
| 方位向分辨率/m | 0.5 | |
| 距离向分辨率/m | 0.1 | |
| 图像大小/像元 | 512×512 |
将模拟地表的中心点设为控制点,使用本文方法提取DEM,并与地表结果进行对比,在不同的基线误差情况下,得到DEM误差见图 4,其中图 4(d)为不同基线误差情况下ST(图 3)沿线的DEM误差变化曲线。

|
| 图 4 不同基线误差下的DEM误差 Fig. 4 DEM errors under different baseline errors |
由图 4可知:①对比图 4(a)和图 4(b)可知,毫米级、厘米级基线长度误差将分别导致厘米级、分米级的DEM误差;②由图 4(c)可知, 较大的基线倾角误差仍可取得较高的DEM精度;③由图 4(d)可知,在不同的基线长度和倾角误差的情形下,DEM误差沿距离向呈现大致的线性变化趋势,在控制点处的误差为0,S点和控制点之间的误差为正数,T点和控制点之间的误差为负数,这说明将控制点设在雷达视场的中心区域附近,可有效降低图像边缘和整体的DEM误差。
综上所述,本文方法的DEM提取精度与基线误差息息相关,当基线长度估计达到毫米级精度,基线倾角估计也达到较高的精度时,可保证较高的DEM精度;将控制点布设在雷达视场的中心区域附近,可减少图像边缘和整体的高程误差。
2.2 试验数据试验使用中国科学院电子学研究所研制的Geo-MiniSAR设备,搭建了车载双天线干涉SAR系统(图 5),结合高精度POS系统和聚焦算法[6, 20-21],可同时得到双通道高分辨率SAR影像。采集时间为2018年6月,成像区域为湖北省武汉市某地区, 车载运行轨道为东风大道高架桥上一段(图 6),表 3为车载SAR影像的主要参数。

|
| 图 5 车载双天线干涉SAR系统 Fig. 5 Vehicle-mounted interferometric SAR system |

|
| 图 6 测区与车载平台运行轨道信息 Fig. 6 Information of mapping area and vehicle platform's orbit |
| 参数类型 | 参数 | 取值 |
| 成像 平台 参数 |
基线长度/m | 0.19 |
| 基线倾角/(°) | 85 | |
| 雷达波束宽度/(°) | 20 | |
| 平台相对地面高度/m | 20 | |
| 影像 数据 参数 |
波长/m | 0.02 |
| 方位向分辨率/m | 0.12 | |
| 距离向分辨率/m | 0.12 | |
| 图像大小/像素 | 4060×4096 |
车载SAR影像为图 7(主影像),测区布设角反射器(编号1—14, 图 7中小图)并采集碎部点(编号15—23)作为地面控制点,角反射器在图像呈十字丝形状[22],通过模板匹配、特征点检测等方法[23]可得到精确影像坐标。对控制点的中心位置布设控制网,使用传统的测量手段(全站仪前方交会测量[24])得到其精确地理坐标,点坐标的测量中误差均小于6 mm。

|
| 图 7 车载SAR影像及控制点分布 Fig. 7 Vehicle-mounted SAR image and distribution of GCP |
2.3 结果与分析
使用基于干涉定标的多控制点方法以及本文提出的单控制点方法进行车载双天线干涉SAR的DEM提取对比试验。
前期的干涉处理一致,得到车载SAR主辅影像的滤波后干涉相位图(图 8)、相干系数图(图 9)及解缠相位图(图 10),可知阴影区和植被区相干性较低,相位变化复杂;道路、裸地和草地等区域相干性高,干涉条纹明显,相位变化平缓。

|
| 图 8 滤波后干涉相位图 Fig. 8 Interferometric phase map after filtering |

|
| 图 9 相干系数图 Fig. 9 Coherence map |

|
| 图 10 解缠相位图 Fig. 10 Unwrapped phase map |
多控制点方法采用干涉定标参数分离式解算方法[11],该方法解算参数包括干涉相位偏置、基线长度和基线倾角,这3个参数的敏感度量级[25-26]较大,该方法极大地减少了敏感度矩阵条件数,对高程变化普适性较高,适用于车载SAR的干涉定标。选择部分控制点[27](编号3、4、6、7、10、13、15、16、17、20、23)进行干涉定标,剩余点作为检查点,干涉定标结果见表 4。
| 干涉参数类型 | 定标前初始值 | 定标结果(偏移量) | |
| 干涉相位偏置 | 相位整周数 | — | -4π |
| /rad | 整体误差相位 | — | -2.956 |
| 基线长度/m | 0.19 | -0.022 | |
| 基线倾角/(°) | 85 | -0.974 | |
将多控制点方法的求解高程与点真实高程进行对比以评定精度(表 5),其中14号点在图像中显示散焦,故未纳入考虑,得到控制点的高程中误差为0.121 4 m,检查点为0.258 4 m。
| 控制点 | 检查点 | |||||
| 编号 | 求解高程 | 真实高程 | 编号 | 求解高程 | 真实高程 | |
| 3 | 19.931 6 | 20.003 8 | 1 | 20.160 5 | 19.898 5 | |
| 4 | 20.236 1 | 20.064 6 | 2 | 19.841 0 | 19.881 9 | |
| 6 | 20.077 7 | 19.994 2 | 5 | 20.546 3 | 20.118 5 | |
| 7 | 20.052 8 | 19.982 2 | 8 | 20.013 4 | 19.859 5 | |
| 10 | 19.405 0 | 19.594 2 | 9 | 18.955 5 | 19.563 1 | |
| 13 | 19.461 4 | 19.626 2 | 11 | 19.709 8 | 19.750 9 | |
| 15 | 18.129 3 | 18.191 3 | 12 | 19.569 6 | 19.471 3 | |
| 16 | 18.739 4 | 18.694 7 | 18 | 20.521 4 | 20.542 6 | |
| 17 | 20.054 5 | 19.885 2 | 19 | 29.214 5 | 29.213 3 | |
| 21 | 24.655 7 | 24.767 8 | 21 | 18.918 2 | 19.101 8 | |
| 23 | 18.103 5 | 18.030 4 | 22 | 21.427 3 | 21.220 7 | |
| 高程中误差 | 0.121 4 | 高程中误差 | 0.258 4 | |||
单控制点方法选择1号角反射器点作为控制点,剩余点作为检查点,高程迭代求解的阈值ε设为0.000 1,表 6为单控制点方法根据控制点得到的相关参数值。
| 参数类型 | 数值 |
| 斜距改正数/m | 0.732 |
| 相位改正数/rad | -15.416 |
| 基线长度估计值/m | 0.167 95 |
| 基线倾角估计值/(°) | 83.874 |
| ΔB/m | 0.016 6 |
同样将单控制点方法的求解高程与点真实高程进行对比以评定精度(表 7),得到检查点的高程中误差为0.301 8 m。
| 点编号 | 求解高程 | 真实高程 |
| 2 | 20.152 8 | 19.881 9 |
| 3 | 20.311 8 | 20.003 8 |
| 4 | 20.250 3 | 20.064 6 |
| 5 | 19.996 2 | 20.118 5 |
| 6 | 19.659 4 | 19.994 2 |
| 7 | 19.951 3 | 19.982 2 |
| 8 | 19.486 9 | 19.859 5 |
| 9 | 19.919 6 | 19.563 1 |
| 10 | 20.037 1 | 19.594 2 |
| 11 | 20.163 | 19.750 9 |
| 12 | 19.945 6 | 19.471 3 |
| 13 | 19.866 7 | 19.626 2 |
| 15 | 18.019 3 | 18.191 3 |
| 16 | 18.858 1 | 18.694 7 |
| 17 | 19.93 10 | 19.885 2 |
| 18 | 20.088 2 | 20.542 6 |
| 19 | 29.354 7 | 29.213 3 |
| 20 | 25.316 2 | 24.767 8 |
| 21 | 18.949 8 | 19.101 8 |
| 22 | 20.999 7 | 21.220 7 |
| 23 | 17.929 6 | 18.030 4 |
| 高程中误差 | 0.301 8 | |
图 11和图 12分别为多控制点方法和单控制点方法获得的DEM结果,在高程变化范围20~40 m内,两者结果较为一致,结合影像图和相干系数图分析可知:在高相干区域,如平地、道路和建筑物等地,高程结果变化均匀,与实际地形吻合;在低相干区域,如植被和阴影区域,高程变化较为剧烈。

|
| 图 11 多控制点方法的DEM提取结果 Fig. 11 DEM result of multiple control points method |

|
| 图 12 单控制点方法的DEM提取结果 Fig. 12 DEM result of single control point method |
将两者DEM差值结果(图 13(a))进行统计得到不同的高程差值占总像素数的比例(图 13(b)),可以发现,高程差值高度集中于-1~1 m的范围,不在这个范围的差值主要出现在相干性较低的地方(对应图 13(a)中的白色区域),如植被和阴影区,定量计算得到:两者高程偏差小于0.5 m的点占比为84%,小于1 m的点占比92%,两者结果具有高度的统一性。

|
| 图 13 多控制点方法与单控制点方法的DEM结果对比 Fig. 13 Comparison of DEM results between two methods |
综上所述,本文提出的基于单控制点的车载双天线干涉SAR DEM提取方法得到的DEM结果在检查点的高程中误差为0.301 8 m,基于干涉定标的多控制点方法为0.258 4 m,说明本文方法可达到较高的DEM提取精度,只略低于多控制点方法。两种方法结果的高程偏差小于0.5 m的点占比为84%,小于1 m的点占比92%,并且高偏差点集中于植被和阴影等低相干区,在高相干区,两者高程结果变化均匀,与实际地形吻合,具有高度的统一性,这表明了本文方法的有效性。
3 总结针对车载双天线SAR平台和数据处理特点,本文提出了基于单控制点的车载双天线干涉SAR影像的DEM提取方法,仿真试验证明:当基线长度估计达到毫米级精度,基线倾角估计也达到较高的精度时,可保证该方法取得较高的DEM提取精度;将控制点布设在雷达视场的中心区域附近,可有效减少图像边缘和整体的高程误差。
以真实车载双天线SAR影像数据进行试验,本文提出的单控制点方法的DEM结果在检查点的高程中误差为0.301 8 m,基于干涉定标的多控制点方法在检查点的高程中误差为0.258 4 m,单控制点方法的DEM提取精度只略低于多控制点方法,在高相干区域,如裸地和道路等,两者高程结果变化均匀,与实际地形吻合,具有高度的统一性,验证了本文方法的有效性。本文方法只依赖于单控制点信息,无需布设大量控制点进行干涉定标,可大大简化外业工作。
基于单控制点的车载双天线干涉SAR DEM提取方法并没有完全消除相位、斜距、基线长度和基线倾角等雷达参数的误差带来的影响,仿真试验证明DEM误差沿距离向呈现大致的线性变化趋势,根据此特点可进一步对DEM误差的特性进行定量分析和消除以提高DEM精度,为后续研究提供方向。
| [1] |
邓云凯, 赵凤军, 王宇. 星载SAR技术的发展趋势及应用浅析[J]. 雷达学报, 2012, 1(1): 1-10. DENG Yunkai, ZHAO Fengjun, WANG Yu. Brief analysis on the development and application of spaceborne SAR[J]. Journal of Radars, 2012, 1(1): 1-10. |
| [2] |
ROSEN P A, HENSLEY S, WHEELER K, et al. UAVSAR:new NASA airborne SAR system for research[J]. IEEE Aerospace and Electronic Systems Magazine, 2007, 22(11): 21-28. |
| [3] |
熊涛, 杨健, 彭应宁. 基于极化SAR干涉反演DEM的方法[J]. 清华大学学报(自然科学版), 2007, 47(7): 1170-1173. XIONG Tao, YANG Jian, PENG Yingning. Approach to reversion of DEM based on polarimetric SAR interferometry[J]. Journal of Tsinghua University (Science and Technology), 2007, 47(7): 1170-1173. |
| [4] |
刘国祥, 丁晓利, 李志林, 等. 使用InSAR建立DEM的试验研究[J]. 测绘学报, 2001, 30(4): 336-342. LIU Guoxiang, DING Xiaoli, LI Zhilin, et al. Experimental investigation on DEM generation through InSAR[J]. Acta Geodaetica et Cartographica Sinica, 2001, 30(4): 336-342. DOI:10.3321/j.issn:1001-1595.2001.04.012 |
| [5] |
WERNER M. Shuttle radar topography mission (SRTM) mission overview[J]. Frequenz, 2001, 55(3-4): 75-79. |
| [6] |
陈立福, 韦立登, 向茂生, 等. 机载双天线干涉SAR非线性近似自配准成像算法[J]. 电子与信息学报, 2010, 32(9): 2208-2214. CHEN Lifu, WEI Lideng, XIANG Maosheng, et al. Auto-registration imaging algorithm of non-linear approximation for airborne dual-antenna InSAR[J]. Journal of Electronics & Information Technology, 2010, 32(9): 2208-2214. |
| [7] |
张薇, 向茂生, 吴一戎. 基于正侧视模型的机载双天线干涉SAR外定标方法[J]. 遥感技术与应用, 2008, 23(3): 346-350. ZHANG Wei, XIANG Maosheng, WU Yirong. Studies on outside calibration method based on the boresight model for dual-antenna airborne interferometric SAR[J]. Remote Sensing Technology and Application, 2008, 23(3): 346-350. |
| [8] |
梁菲, 彭桂辉, 谭克龙, 等. GPS/INS支持下的机载干涉SAR定标试验[J]. 测绘工程, 2012, 21(6): 60-62, 67. LIANG Fei, PENG Guihui, TAN Kelong, et al. Calibration study on airborne interferometric SAR based on GPS/INS[J]. Engineering of Surveying and Mapping, 2012, 21(6): 60-62, 67. |
| [9] |
王萌萌, 黄国满, 罗新, 等. 基于点相位改正的机载干涉SAR定标算法[J]. 测绘科学, 2014, 39(4): 97-101. WANG Mengmeng, HUANG Guoman, LUO Xin, et al. Calibration method for airborne interferometric SAR based on point phase correction[J]. Science of Surveying and Mapping, 2014, 39(4): 97-101. DOI:10.16251/j.cnki.1009-2307.2014.04.017 |
| [10] |
汪丙南, 向茂生, 蒋帅, 等. 联合对飞数据的单控制点机载干涉SAR定标算法[J]. 测绘学报, 2018, 47(11): 1495-1505. WANG Bingnan, XIANG Maosheng, JIANG Shuai, et al. Calibration of airborne interferometric SAR with single corner reflector in two converse flights[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(11): 1495-1505. DOI:10.11947/j.AGCS.2018.20170450 |
| [11] |
申琳, 曾琪明, 焦健. 机载SAR干涉定标参数分离式解算方法研究[J]. 地球信息科学学报, 2015, 17(7): 862-870. SHEN Lin, ZENG Qiming, JIAO Jian. Study on the parameters-separated solving method of airborne SAR interferometric calibration[J]. Journal of Geo-Information Science, 2015, 17(7): 862-870. |
| [12] |
META A, HOOGEBOOM P, LIGTHART L P. Signal processing for FMCW SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007, 45(11): 3519-3532. |
| [13] |
LU Biying, ZHANG Xiang, SONG Qian, et al. A vehicle based SFCW SAR for differential interferometry[C]//Proceedings of 2011 3rd International Asia-pacific Conference on Synthetic Aperture Radar. Seoul, South Korea: IEEE, 2011.
|
| [14] |
WANG Jian, LI Yanghuan, ZHOU Zhimin, et al. Image formation techniques for vehicle-mounted forward-looking ground penetrating SAR[C]//Proceedings of 2008 International Conference on Information and Automation. Changsha, China: IEEE, 2008.
|
| [15] |
张长耀, 方志宏, 张卫华, 等. 车载X波段合成孔径雷达的数据采集及成像处理[J]. 现代电子, 2001(3): 1-4, 16. ZHANG Changyao, FANG Zhihong, ZHANG Weihua, et al. Data acquisition and imaging processing of a wheel-type X-band SAR[J]. Radar Science and Technology, 2001(3): 1-4, 16. |
| [16] |
张琳, 闫军. Ka频段车载SAR成像系统分析[J]. 科技创新导报, 2011(24): 27-28, 197. ZHANG Lin, YAN Jun. Analysing of wheel-type Ka-band SAR image system[J]. Science and Technology Consulting Herald, 2011(24): 27-28, 197. |
| [17] |
张海瀛, 李真芳, 解金卫. 车载全极化InSAR系统通道误差校正[J]. 系统工程与电子技术, 2017, 39(2): 298-303. ZHANG Haiying, LI Zhenfang, XIE Jinwei. Channel error calibration for automobile-based fully polarimetric InSAR system[J]. Systems Engineering and Electronics, 2017, 39(2): 298-303. |
| [18] |
GOLDSTEIN R M, WERNER C L. Radar interferogram filtering for geophysical applications[J]. Geophysical Research Letters, 1998, 25(21): 4035-4038. |
| [19] |
REFICE A, SATALINO G, STRAMAGLIA S, et al. Weights determination for minimum cost flow InSAR phase unwrapping[C]//Proceedings of IEEE 1999 International Geoscience and Remote Sensing Symposium. Hamburg: IEEE, 1999.
|
| [20] |
杨大烨, 谢天怀, 胡宝余. 机载SAR用的GPS/SINS组合导航系统研究[J]. 中国惯性技术学报, 2002, 10(4): 19-23. YANG Daye, XIE Tianhuai, HU Baoyu. Integrated GPS/SINS navigation system for airborne SAR[J]. Journal of Chinese Inertial Technology, 2002, 10(4): 19-23. |
| [21] |
丁赤飚. 基于惯导系统的机载SAR运动补偿精度分析[J]. 电子与信息学报, 2002, 24(1): 12-18. DING Chibiao. Error analysis of airborne SAR motion compensation using INS[J]. Journal of Electronics and Information Technology, 2002, 24(1): 12-18. |
| [22] |
张桂芳, 郭利民, 单新建, 等. 人工角反射器辐射特性及其像素级精定位参数[J]. 地震地质, 2014, 36(2): 501-512. ZHANG Guifang, GUO Limin, SHAN Xinjian, et al. Radiation characteristics of artificial corner reflectors and parameters selection for its pixel level[J]. Seismology and Geology, 2014, 36(2): 501-512. |
| [23] |
黄洁慧, 谢谟文, 马睿, 等. 雷达干涉测量中人工角反射器设计及在影像图中的识别[J]. 测绘科学技术学报, 2011, 28(4): 270-273, 282. HUANG Jiehui, XIE Mowen, MA Rui, et al. Design of the artificial corner reflector in interferometric synthetic aperture radar and recognition in images[J]. Journal of Geomatics Science and Technology, 2011, 28(4): 270-273, 282. |
| [24] |
孔祥元, 郭际明, 刘宗泉. 大地测量学基础[M]. 2版. 武汉: 武汉大学出版社, 2005. KONG Xiangyuna, GUO Jiming, LIU Zongquan. Foundation of geodesy[M]. 2nd ed. Wuhan: Wuhan University Press, 2005. |
| [25] |
张薇, 向茂生, 吴一戎. 矩阵条件数在机载InSAR参数定标中的应用[J]. 系统仿真学报, 2010, 22(3): 589-592. ZHANG Wei, XIANG Maosheng, WU Yirong. Calibration of airborne interferometric SAR parameters with matrix condition number[J]. Journal of System Simulation, 2010, 22(3): 589-592. |
| [26] |
MALLORQUI J J, BARA M, BROQUETAS A. Calibration requirements for airborne SAR interferometry[C]//Proceedings of SPIE 4173, SAR Image Analysis, Modeling, and Techniques Ⅲ. Barcelona, Spain: SPIE, 2000.
|
| [27] |
王彦平, 彭海良, 云日升. 机载干涉合成孔径雷达定标中的定标器布放[J]. 电子与信息学报, 2004, 26(1): 89-94. WANG Yanping, PENG Hailiang, YUN Risheng. Locating calibrators in airborne InSAR calibration[J]. Journal of Electronics & Information Technology, 2004, 26(1): 89-94. |