


2. 地理信息工程国家重点实验室, 陕西 西安 710054;
3. 信息工程大学, 河南 郑州 450052;
4. 宇航动力学国家重点实验室, 陕西 西安 710043
2. State Key Laboratory of Geo-Information Engineering, Xi'an 710054, China;
3. Information Engineering University, Zhengzhou 450052, China;
4. State Key Laboratory of Astronautic Dynamics, Xi'an 710043, China
为了在监测站局限于中国境内的条件下提供有竞争力的全球服务,第三代北斗卫星导航系统(the third-generation BeiDou navigation satellite system,BDS-3)采用了星间链路技术[1]。每颗卫星都搭载有星间链路设备,卫星之间或卫星与装备有同样设备的地面站(锚固站)之间可以在Ka频段进行双向通信和测量。这些Ka频段的伪距观测值(简称Ka伪距)可以增强区域监测站条件下的BDS-3卫星定轨和时间同步[2-6],也可以独立地实现定轨和时间同步,从而使BDS-3星座可以完全脱离地面监测站实现自主导航[7-10]。
由于星间链路通常以时分多址的模式运行,星间测距数据不是同时观测的。利用星间链路数据进行(自主)定轨和时间同步的传统方法是[11-19]:首先,将原始的非同时观测的单程伪距观测量进行历元归化[20],得到在指定目标时刻的虚拟观测量,即归化伪距;然后利用两个相向的“同时观测”的归化伪距构造出无钟差组合观测量[21](也称为星历观测量[12])和无几何组合观测量[21](也称为钟差观测量[12]);最后分别用这两种导出观测量独立地进行定轨和时间同步。已有的针对BDS-3星间链路的定轨和时间同步应用的研究也多采用这一方法。文献[9-10]利用星间和星地的无钟差组合观测量进行定轨;文献[8]单独利用星间的无钟差组合观测量进行定轨;文献[22]联合星间无几何组合观测量和星地双向时频传递数据进行时间同步;文献[2, 4-5, 23]利用星间无钟差组合观测量联合地面监测站L频段观测数据进行定轨。与上述文献不同,文献[6]采用分段多项式对卫星钟差进行建模,从而能够直接处理原始单程星间Ka伪距,并联合地面监测站数据实现BDS-3卫星定轨和时间同步。值得一提的是,在上述这些研究中,具有“锚固”作用的星地Ka伪距都未应用于BDS-3的时间同步。本文按照文献[6]的思路,直接利用原始的星间和星地Ka伪距一体化地实现北斗三号卫星定轨和时间同步。在此基础上,给出单独处理单程Ka伪距时解算设备时延偏差的方法并分析预报钟速误差对定轨和时间同步的影响。
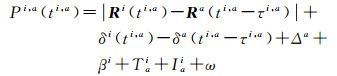
1 观测方程 1.1 星间Ka伪距观测量假设卫星i在时刻ti, j获得对卫星j的星间观测量为Pi, j(ti, j),观测方程可表示如下[24]
 (1)
(1)
式中,τi, j为信号在空间传播的时间;Ri和Rj分别为卫星i和j在信号接收和发射时刻的位置;δi和δj分别为卫星i和j的钟差;Δj和βi分别为发射和接收设备的硬件时延,通常具有较好的稳定性,在短时间(如几天)内可视为常量;ω为测量噪声。式(1)省略了信号传播的相对论延迟、卫星天线相位中心偏差等改正项,所有符号都以长度为单位。
1.2 星地Ka伪距观测量观测方程式(1)同样适用于卫星与锚固站之间的伪距观测数据,此时需要考虑对流层和电离层延迟。例如卫星i在ti, a时刻观测到来自锚固站a的伪距观测量Pi, a(ti, a)可表示如下
 (2)
(2)
式中,Tai和Iai分别表示对流层和电离层延迟,其他符号的含义同式(1)。
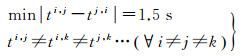
1.3 钟差建模BDS-3星间链路采用时分多址的模式运行[9, 24]。以卫星之间的链路为例,每颗卫星按照预设的建链计划依次轮询实现与其他卫星的双向测距和通信。在一个轮询周期内,给任意一对(可建链的)卫星分配的建链时隙为3 s,每颗卫星分别用1.5 s交替接收和发射信号。因此,Ka伪距数据的观测时标具有如下关系
 (3)
(3)
如果考虑钟差的变化,对于同一颗卫星,每一个Ka伪距观测量包含的钟差都是不同的,需要为每个观测量对应的两颗卫星分别设置一个钟差参数,钟差参数的数量就是观测值数量的两倍。没有多余观测,无法采用最小二乘法求解出所有钟差参数,更遑论求解其他参数。因此,现有利用BDS-3星间或星地Ka伪距进行自主定轨或时间同步的文献[9-10, 18-19],都将不同时刻的观测数据就近归算到指定的时间历元(例如将同一时隙内的两个相对的Ka伪距归算到同一整3 s时刻),从而减少钟差参数,并进一步进行轨道和钟差信息的解耦,最后独立地进行定轨和时间同步。
BDS-3卫星和锚固站都搭载了具有很高频率稳定度的原子钟,在短时间内,卫星钟差主要呈线性变化。本文按照文献[24]的思路,用分段一次多项式表示卫星钟差,即选取一系列互不重叠的时间窗,在每个时间窗内,卫星或锚固站钟差用一次多项式表示。不妨设第k个时间窗的宽度为w,中心点为tk,则任意时刻t的钟差可表示为
 (4)
(4)
式中,δk为对应中心点(参考时刻)tk的钟差;
这样,在同一时间窗内,每颗卫星或每个锚固站只有两个钟差参数(δk*和
为了控制钟差模型误差,时间窗的宽度不宜过长。例如,对于频率稳定度为10-12的卫星钟,若取w=5 min,引起的最大误差将达到0.3 ns;若取w=1 min,则最大误差不超过0.06 ns。
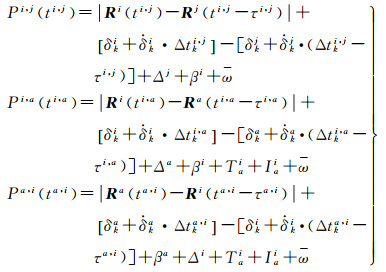
1.4 联合观测方程将式(4)分别代入式(1)和式(2)就得到第k个时间窗内星地和星间Ka伪距联合观测方程
 (5)
(5)
式中,Δtk*, *为观测时刻t*, *相对于时间窗参考时刻tk的时间差;ω为观测量误差,包含了测量误差和分段线性钟差模型引起的误差。
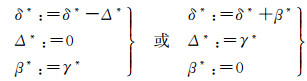
在式(5)中,卫星和锚固站的钟差参数δk*与硬件时延参数Δ*、β*无法分离,在实际应用中只能解算出收发时延之和:γ*=β*+Δ*。为此,应该对式(5)进行重新参数化:δk*、Δ*和β*应该替换为
 (6)
(6)
以上两种形式是等价的。将式(6)代入式(5),进行线性化之后,就可以同时解算卫星轨道、钟差和硬件时延等参数。在实际应用中,也可以直接采用式(5)作为观测方程,通过对β*和Δ*分别施加适当的先验约束消除由于二者与钟差参数的相关性所引起的秩亏。
文献[21]指出,为了使获得的卫星钟差能够直接应用于用户定位和授时,利用Ka伪距数据求解的卫星钟差也应该包含L频段导航信号设备群时延,当单独采用Ka伪距进行定轨和时间同步处理时,必须对每颗卫星的星间链路发射和接收时延进行修正。
对于卫星钟速,实际应用中,可以利用预报值替代以减少未知参数。这样可以避免解算钟速参数
收集2018年DOY152—163(共12 d)期间8颗BDS-3卫星(B19-B22、B27-B30)和两个锚固站(A01、A02)的Ka伪距观测数据。
为了验证本文的方法,采用SPODS[25]软件进行定轨和时间同步处理,数据处理弧长为3 d。如图 1所示,每5 min划分一个时间窗,每个时间窗以整5 min时刻为中心和参考时刻,宽度为1 min。Ka伪距观测量按等权处理。锚固站坐标、地球自转参数固定于已知值;太阳光压采用5参数的ECOM模型(D0, Y0, B0, Bs & Bc);锚固站的对流层天顶延迟采用Saastamoinen模型计算,用GMF映射函数计算对应信号传播方向的路径延迟,每天估计一个天顶延迟参数。忽略Ka伪距数据电离层延迟。卫星的星间链路时延固定于文献[24]的标定值,每个3 d弧段每个锚固站分别估计一个发射和接收时延参数,每个参数设置松弛的先验约束(σ=10 000 m)。

|
| 图 1 时间窗划分 Fig. 1 Time slot assignment |
为了分析卫星钟速误差对结果的影响,采用以下两种不同的钟速处理策略:试验1(EXP1),卫星钟速用预报值修正;试验2(EXP2),忽略卫星钟速修正。其中试验2可以视为钟速误差的极限情况。由于缺乏先验信息,两组试验中锚固站的钟速都视为0。这样,对于每颗卫星和每个锚固站,只需要解算对应时间窗参考时刻的钟差参数。为了消除秩亏,以A02的时钟为基准钟,将其约束为0。
获得轨道和钟差解算结果后,向后预报24 h得到预报轨道和钟差。其中卫星钟差用二次多项式进行拟合和预报。采用重叠段互差的方法来评估轨道和钟差的解算精度。其中卫星轨道精度用重叠段互差的RMS来表示;计算卫星钟差重叠段互差时,每个历元扣除所有卫星钟差互差的均值以消除时钟基准的差异,用95%分位值表示钟差的解算精度。在评估预报轨道和钟差的精度时,以相邻的后一个弧段的最后一天结果作为参考值。
2.2 轨道和钟差估计结果图 2给出了两组试验中典型星间测距链路(B27-B19)的Ka伪距残差与Δtki, j(观测时刻与时间窗参考时刻的时差)的关系。可以看出,在试验1中,残差几乎都不超过0.1 m,且与Δtki, j不相关;试验2中,残差的变化范围明显增大,在-0.4~0.4 m,且存在明显的随Δtki, j线性变化的趋势,大体呈现出以参考时刻为中心的原点对称,而且正向和反向的观测值残差呈明显的负相关关系。

|
| 图 2 典型链路的Ka伪距残差与Δtki, j的关系 Fig. 2 Residuals of Ka-pseudoranges for the link B27-B19 as a function of Δtki, j (the difference of the observation time to the reference time of each 1-min time slot) |
图 3给出了按信号接收端统计的Ka伪距残差的RMS。可以看出,试验1中,各颗卫星的RMS在0.03~0.08 m;锚固站的Ka伪距残差RMS不超过0.11 m;试验2中,卫星和锚固站的RMS都显著增大。各颗卫星的RMS在0.11~0.25 m,增幅在150%~350%,平均为243%;锚固站的RMS也略有增大,A01和A02的RMS分别增大68%和34%。统计表明,试验1中,各颗卫星Ka伪距残差的平均RMS为0.052 m,锚固站的平均RMS为0.078 m;试验2中,这两个值分别为0.178 m和0.113 m。

|
| 图 3 按信号接收端统计的Ka伪距残差的RMS Fig. 3 The RMS of one-way Ka-pseudorange residuals of each satellite or anchor station |
图 4给出了两组试验中各颗卫星轨道重叠段互差的RMS。可以看出,R方向的RMS都小于0.03 m,试验2的结果比试验1的稍大;试验1中各颗卫星在T和N方向的RMS都小于0.2 m;试验2中,各颗卫星在T和N方向的RMS都小于0.4 m。

|
| 图 4 按卫星统计的卫星轨道重叠互差RMS Fig. 4 RMS of overlap orbit differences for each satellite |
图 5给出了各卫星钟差重叠互差(95%)。可以看出,两组试验中,各颗卫星钟差精度都优于0.06 ns。试验2的重叠段互差略大一些。

|
| 图 5 按卫星统计的卫星钟差重叠互差(95%) Fig. 5 Overlap clock differences(95%) for each satellite |
表 1统计了两组试验中所有卫星平均的轨道和钟差确定精度。与试验1相比,试验2得到的轨道在R、T、N方向和三维位置的精度分别降低了31%、52%、46%和53%;钟差精度降低了5%。对照图 3,容易发现,忽略钟速修正时,轨道和钟差精度的降低幅度并不像伪距残差那般明显,而且对卫星钟差解算精度的影响要比对轨道精度的影响小得多,几乎可以忽略。
| 试验 | 轨道重叠互差(RMS)/m | 钟差重叠互差(95%)/ns | |||
| R | T | N | 3D | ||
| 试验1 | 0.016 | 0.178 | 0.153 | 0.235 | 0.038 |
| 试验2 | 0.021 | 0.270 | 0.224 | 0.359 | 0.040 |
2.3 锚固站时延估计结果
虽然本文解算了每个锚固站的接收和发射时延,但是只有二者之和才有意义。图 6给出了试验1获得的两个锚固站的收发硬件时延之和的估值序列(扣除了一个常数偏差)。A01只在其中5个弧段与超过两颗卫星进行建链观测,可以获得硬件时延的解。统计表明,A01和A02的收发硬件时延之和的估值序列的标准差分别为0.097、0.134 m;试验2中,对应的数值分别为0.052、0.203 m。两组试验中,两个锚固站的收发时延之和的均值互差都不超过0.11 m。

|
| 图 6 试验1获得的每个弧段的锚固站收发设备时延之和 Fig. 6 Sum of estimated receiving and transmitting hardware delays for each anchor station obtained in EXP1 |
2.4 轨道和钟差预报精度
图 7给出了两组试验中各颗卫星的预报轨道与观测轨道相比在R、T和N方向的RMS。可以看出,两组试验中,R方向的RMS都小于0.06 m,T和N方向的RMS都小于0.4 m。统计表明,试验1中,R、T和N方向的RMS分别为0.033、0.196和0.192 m;试验2的RMS分别为0.041、0.293和0.278 m,与试验1相比,分别增大了24%、49%和45%。

|
| 图 7 各颗卫星的预报轨道在R、T和N方向的精度 Fig. 7 RMS of predicted orbit errors for each satellite compared with the estimated orbits |
图 8给出了每个弧段各颗卫星的钟差拟合残差的RMS序列。可以看出,B21和B22的RMS在多数弧段都大于0.2 ns,普遍大于其他卫星,而其他卫星的RMS则都小于0.2 ns。图 9统计了各颗卫星钟差拟合残差的平均RMS。两组试验中,各颗卫星的RMS都小于0.3 ns,B21和B22的平均RMS显著大于其他卫星,所有卫星平均的RMS分别为0.169、0.214 ns。与试验1相比,试验2的卫星钟差拟合残差RMS增大了26.6%。

|
| 图 8 各颗卫星钟差拟合残差的RMS序列 Fig. 8 RMS of fitting clock residuals for each solution-arc and each satellite |

|
| 图 9 卫星钟差拟合残差的平均RMS Fig. 9 Overall RMS of clock fitting residuals for each satellite |
图 10对比了两组试验中各颗卫星的钟差预报误差(95%分位值)。可以看出,B21和B22的钟差预报误差要明显大于其他卫星,这可能说明这两颗卫星的时钟稳定性不如其他卫星。统计表明,试验1的平均钟差预报误差(95%)为0.992 ns;试验2为1.062 ns,相比试验1增加了7%。还可以看出,卫星B27-B30的预报误差普遍小于其他4颗卫星,这可能得益于这4颗卫星的星载氢钟[4]具有更好的性能。

|
| 图 10 各颗卫星的钟差预报误差(95%) Fig. 10 Predicted clock error(95%) for each satellite |
3 结论
本文展示了一种利用卫星之间和卫星与锚固站之间的伪距测量值进行导航卫星定轨和时间同步的方法。该方法在一系列较短(如1 min)的时间段内用一次多项式对卫星和锚固站钟差进行建模,直接处理非同时观测的原始Ka频段伪距数据一体化地解算卫星轨道和钟差。本文还同时讨论了解算卫星和锚固站的Ka频段设备时延的方法。利用8颗BDS-3卫星和两个锚固站的实测Ka伪距数据进行试验,证明了该方法的可行性。结果表明,用预报值修正卫星钟速时,星间Ka伪距残差RMS为0.052 m;采用重叠弧段法进行评估,R方向轨道确定精度(RMS)为0.016 m,钟差的估计精度(95%)为0.033 ns,二者的预报精度分别为0.033 m和0.992 ns。解算得到的锚固站收发设备时延之和的稳定性优于0.5 ns。在没有钟速预报信息时,虽然星间Ka伪距残差的RMS增大到0.178 m,但卫星轨道和钟差的精度仍然令人欣喜:轨道(径向)和钟差的估计精度分别为0.021 m和0.992 ns;二者的预报精度分别为0.041 m和1.092 ns。这表明本文的方法具有较好的适应能力,可不依赖于预报钟速信息。
本文初步展示了用原始Ka伪距观测量进行一体化定轨和时间同步的效果,下一步可通过优化时间窗宽度和间隔,改进锚固站对流层天顶延迟的解算策略以进一步提高定轨和时间同步的精度。此外,有必要开展与传统方法的定量比较试验。
| [1] |
YANG Yuanxi, XU Yangyin, LI Jinlong, et al. Progress and performance evaluation of BeiDou global navigation satellite system:data analysis based on BDS-3 demonstration system[J]. Science China Earth Sciences, 2018, 61(5): 614-624. DOI:10.1007/s11430-017-9186-9 |
| [2] |
YANG Daoning, YANG Jun, LI Gang, et al. Globalization highlight:orbit determination using BeiDou inter-satellite ranging measurements[J]. GPS Solutions, 2017, 21(3): 1395-1404. DOI:10.11947/j.AGCS.2017.20160203 |
| [3] |
宋小勇, 毛悦, 冯来平, 等. BD卫星星间链路定轨结果及分析[J]. 测绘学报, 2017, 46(5): 547-553. SONG Xiaoyong, MAO Yue, FENG Laiping, et al. The preliminary result and analysis for BD orbit determination with inter-satellite link data[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(5): 547-553. DOI:10.11947/j.AGCS.2017.20160203 |
| [4] |
WANG Chen, ZHAO Qile, GUO Jing, et al. The contribution of intersatellite links to BDS-3 orbit determination:model refinement and comparisons[J]. Navigation, 2019, 66(1): 71-82. DOI:10.1002/navi.295 |
| [5] |
XIE Xin, GENG Tao, ZHAO Qile, et al. Precise orbit determination for BDS-3 satellites using satellite-ground and inter-satellite link observations[J]. GPS Solutions, 2019, 23(2): 40. DOI:10.1007/s10291-019-0823-5 |
| [6] |
阮仁桂, 魏子卿, 贾小林. 星间单程伪距联合监测站数据确定北斗三号卫星轨道和钟差[J]. 测绘学报, 2019, 48(3): 269-275. RUAN Rengui, WEI Ziqing, JIA Xiaolin. BDS-3 satellite orbit and clock determination with one-way inter-satellite pseudorange and monitoring station data[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(3): 269-275. DOI:10.11947/j.AGCS.2019.20180483 |
| [7] |
RAJAN J A, BRODIE P, RAWICZ H. Modernizing GPS autonomous navigation with anchor capability[C]//Proceedings of the 16th International Technical Meeting of the Satellite Division of the Institute of Navigation. Portland: ION, 2003: 1534-1542.
|
| [8] |
REN Xia, YANG Yuanxi, ZHU Jun, et al. Orbit determination of the next-generation BeiDou satellites with intersatellite link measurements and a priori orbit constraints[J]. Advances in Space Research, 2017, 60(10): 2155-2165. DOI:10.1016/j.asr.2017.08.024 |
| [9] |
TANG Chengpan, HU Xiaogong, ZHOU Shanshi, et al. Initial results of centralized autonomous orbit determination of the new-generation BDS satellites with inter-satellite link measurements[J]. Journal of Geodesy, 2018, 92(10): 1155-1169. DOI:10.1007/s00190-018-1113-7 |
| [10] |
REN Xia, YANG Yuanxi, ZHU Jun, et al. Comparing satellite orbit determination by batch processing and extended Kalman filtering using inter-satellite link measurements of the next-generation BeiDou satellites[J]. GPS Solutions, 2019, 23(1): 25. DOI:10.1007/s10291-018-0816-9 |
| [11] |
CODIK A. Autonomous navigation of GPS satellites:a challenge for the future[J]. Navigation, 1985, 32(3): 221-232. DOI:10.1002/j.2161-4296.1985.tb00906.x |
| [12] |
ANANDA M P, BERNSTEIN H, CUNNINGHAM K E, et al. Global positioning system (GPS) autonomous navigation[C]//Proceedings of IEEE Symposium on Position Location and Navigation: A Decade of Excellence in the Navigation Sciences. Las Vegas: IEEE, 1990: 497-508.
|
| [13] |
宋小勇. Compass导航卫星定轨研究[D].西安: 长安大学, 2009: 169. SONG Xiaoyong. Study on the orbit determination of Compass navigation satellites[D]. Xi'an: Chang'an University, 2009: 169. http://cdmd.cnki.com.cn/Article/CDMD-11941-1011185305.htm |
| [14] |
朱俊.基于星间链路的导航卫星轨道确定及时间同步方法研究[D].长沙: 国防科学技术大学, 2011: 218. ZHU Jun. Research on orbit determination and time synchronizing of navigation satellite based on crosslinks[D]. Changsha: National University of Defense Technology, 2011: 218. |
| [15] |
陈金平, 焦文海, 马骏, 等. 基于星间测距/轨道定向参数约束的导航卫星自主定轨研究[J]. 武汉大学学报(信息科学版), 2005, 30(5): 439-443. CHEN Jinping, JIAO Wenhai, MA Jun, et al. Autonav of navigation satellite constellation based on crosslink range and orientation parameters constraining[J]. Geomatics and Information Science of Wuhan University, 2005, 30(5): 439-443. |
| [16] |
刘万科.导航卫星自主定轨及星地联合定轨的方法研究和模拟计算[D].武汉: 武汉大学, 2008: 163. LIU Wanke. Research and simulation on autonomous orbit determination and combined orbit determination of navigation satellites[D]. Wuhan: Wuhan University, 2008: 163. |
| [17] |
林益明, 秦子增, 初海彬, 等. 基于星间链路的分布式导航自主定轨算法研究[J]. 宇航学报, 2010, 31(9): 2088-2094. LIN Yiming, QIN Zizeng, CHU Haibin, et al. A satellite cross link-based GNSS distributed autonomous orbit determination algorithm[J]. Journal of Astronautics, 2010, 31(9): 2088-2094. DOI:10.3873/j.issn.1000-1328.2010.09.005 |
| [18] |
方琳, 杨旭海, 孙保琪, 等. 基于非同时双向星间链路的自主时间同步仿真分析[J]. 天文学报, 2013, 54(5): 455-466. FANG Lin, YANG Xuhai, SUN Baoqi, et al. Simulation and analysis of autonomous time synchronization based on asynchronism two-way inter-satellite link[J]. Acta Astronomica Sinica, 2013, 54(5): 455-466. DOI:10.3969/j.issn.0001-5245.2013.05.007 |
| [19] |
任夏.北斗导航系统自主定轨理论与方法研究[D].郑州: 信息工程大学, 2018: 146. REN Xia. Research on the theory and method of BDS autonomous orbit determination[D]. Zhengzhou: Information Engineering University, 2018: 146. |
| [20] |
毛悦, 宋小勇, 贾小林. 星间链路观测数据归化方法研究[J]. 武汉大学学报(信息科学版), 2013, 38(9): 1201-1206. MAO Yue, SONG Xiaoyong, JIA Xiaolin, et al. Naturalisation method research on inter-satellite link observation data[J]. Geomatics and Information Science of Wuhan University, 2013, 38(9): 1201-1206. |
| [21] |
阮仁桂, 冯来平, 贾小林. 导航卫星星地/星间链路联合定轨中设备时延估计方法[J]. 测绘学报, 2014, 43(2): 137-142, 157. RUAN Rengui, FENG Laiping, JIA Xiaolin. Equipment delay estimation for GNSS satellite combined orbit determination with satellite-ground link and inter-satellite link observations[J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(2): 137-142, 157. |
| [22] |
PAN Junyang, HU Xiaogong, ZHOU Shanshi, et al. Time synchronization of new-generation BDS satellites using inter-satellite link measurements[J]. Advances in Space Research, 2018, 61(1): 145-153. DOI:10.1016/j.asr.2017.10.004 |
| [23] |
YANG Yufei, YANG Yuanxi, HU Xiaogong, et al. Inter-satellite link enhanced orbit determination for BeiDou-3[J]. The Journal of Navigation, 2020, 73(1): 115-130. DOI:10.1017/S0373463319000523 |
| [24] |
阮仁桂.高精度GNSS网数据处理关键技术研究[D].郑州: 信息工程大学, 2018: 239. RUAN Rengui. Research on key technologies of precise data processing for GNSS networks[D]. Zhengzhou: Information Engineering University, 2018: 239. |
| [25] |
RUAN Rengui, JIA Xiaolin, WU Xianbing, et al. SPODS software and its result of precise orbit determination for GNSS satellites[C]//Proceedings of 2014 China Satellite Navigation Conference (CSNC): vol Ⅲ. Berlin: Springer-Verlag, 2014: 301-312.
|