



海洋大地测量控制网是海洋时空基准网的重要组成部分,其精度与可靠性维系着我国建设海洋强国的战略目标[1-2]。为获得海底控制点三维坐标信息,现阶段最有效的技术手段是利用海面全球导航卫星系统(global navigation satellite system,GNSS)定位结合水下声学信号测距[3-7]。美国最早于20世纪90年代将这一技术应用于实践,并对所布设的海底控制点进行了连续多年的观测,可以得到厘米级的坐标重复性精度[8]。日本早期借助漂流状态下的测量船对海底控制点进行观测,而后通过改进船只结构设计,使其走航轨迹可控,大幅提高了海底控制点定位精度,目前已在水深5000 m的海域建成了多个海底基站阵列[9]。我国于20世纪90年代就有学者探讨了GPS联测海底控制网的精度问题[10],但目前海洋时空基准建设仍处于理论验证阶段,至今还未建立起属于我国的海底控制点,与世界先进水平相比存在不小的差距。
多技术融合以及海洋环境的复杂性为确定高精度海底控制点带来了挑战[11],不少学者为了提升海底控制点坐标的稳定性和精度,在数据处理策略与定位模型构建方面进行了改进尝试。文献[12]提出将声速剖面对深度求取积分,利用该积分值线性表示水下传播时延残差,可以估计声学测距误差,提高水下观测数据质量;文献[13]通过引入半参数平差模型,提高了水下控制点垂直方向解算结果精度;文献[14]在圆走航的基础上,将等效声速剖面误差视为待估参数一并参与平差,简化作业流程的同时,提升了海面基准坐标水下传递效果;文献[15—16]研究了声线入射角对水下测量的影响,通过构建更合理的随机模型改善了水下定位精度。此外,为了约束声速不确定性误差对控制点垂直解的影响,有学者提出可以在平差时增加换能器至应答器间的高精度相对测深结果作为约束条件[17],或在设计测量船航迹时,使其沿多应答器的海面中垂线走航,根据海底点间的平面和深度差关系增加约束方程,进而提升垂直方向定位精度[18]。需要指出的是,上述研究在解算海底控制点坐标时,均将海面观测过程和水下观测过程分开独立进行求解。随着综合PNT(positioning, navigation and timing)体系的逐步完善[19-20],强调多源观测信息融合的数据处理策略将更有利于我国海洋时空基准的长远发展。而近年来水下声学定位精度与海面动态定位精度的日益趋近,也使联合GNSS和声学数据解算海底控制点成为可能。已有学者对GNSS/声学联合定位海底控制点的函数模型及随机模型构建进行了初步探索[21-22],但数据处理时均未考虑动力学模型异常。实际上,载体扰动造成的模型失真不可避免,由于标准卡尔曼滤波抗干扰能力较差,将不再是处理多源信息的有效解算方法[23]。此时应采用自适应滤波算法,实时控制动力学异常扰动影响。
自适应滤波算法利用判别统计量识别异常状态参数,通过构造自适应因子调整异常参数对结果的贡献,提升滤波稳定性与精度。但目前鲜有学者对其在海底控制点坐标解算中的应用效果进行研究。基于以上分析,本文提出了一种解算海底控制点的GNSS/声学联合自适应滤波算法,并就算法中的诸多细节问题展开了讨论,最后利用模拟和实测数据进行了试验对比和验证。
1 GNSS/声学联合定位数学模型 1.1 联合观测方程海面以非差形式进行船载动态精密单点定位(precise point positioning,PPP),是深远海域主要的作业模式。在水下需顾及声速系统误差和随机误差,与海底应答器间通过声学信号往返传播建立联系,如图 1所示。

|
| 图 1 GNSS/声学联合定位原理 Fig. 1 The principle of the GNSS/acoustic joint positioning |
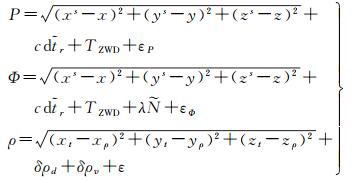
联合海面和水下观测过程可以得联合模型的观测方程[24-25],见式(1)。
 (1)
(1)
式中,上标s表示卫星;P、Φ表示进行了消电离层线性组合后的伪距和载波相位观测量;ρ表示船底换能器至海底应答器的距离,由声学信号测量得到;c表示真空中的光速;
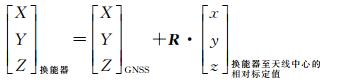
水下部分采用的基准坐标是船底换能器坐标,而海面定位只能得到船载GNSS天线中心地理坐标,两个基准点存在位置偏移。在统一观测信息进行整体求解时,可以将3种主要的姿态角视为待估参数一并进行估计[21]。实际处理时,一般需要预先对船载传感器测量中心点间的相对位置进行标定,利用标定值、姿态角测量值和船载天线中心地理坐标,可以得到全球坐标框架下船底换能器的绝对坐标,如式(2)所示,其中R包含姿态转换矩阵以及局部坐标系与全球坐标系间的旋转矩阵
 (2)
(2)
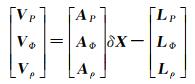
对联合观测方程式(1)进行线性化处理,可以得到相应的误差方程,见式(3)
 (3)
(3)
式中,V=[VP VΦ Vρ]T和L=[LP LΦ Lρ]T分别为误差方程的残差项和自由项;系数阵A=[AP AΦ Aρ]T中包含了3种姿态角参数的对应项;待估参数δX的具体形式为
 (4)
(4)
采用联合GNSS卫星的走航船测量模式确定海底点位,易保证测量轨迹的对称性和观测数据的冗余率。但同时也应注意到,由于测量船运动状态变化频繁,若在数据处理过程中一直采用预设的动力学模型,将难以实时准确描述载体的运动状态。当动力学模型和实际运动状态出现明显差异时,常规滤波算法因不具备自我调节能力,无法削弱误差影响,定位精度将大大降低甚至出现滤波发散。此时可以引入合理的自适应滤波算法,判别异常干扰并对结果进行实时调节。
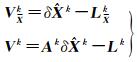
2.1 自适应卡尔曼滤波假设k时刻有如式(5)所示误差方程
 (5)
(5)
式中,LXk即预报值向量Xk,其协方差矩阵为ΣXk,对应权阵为PXk;VXk表示其在k时刻的残差向量;观测值向量的协方差矩阵为Σk,对应权阵为Pk;Vk表示其在k时刻的残差向量。进行卡尔曼滤波估计时,同时使用动力学模型信息和观测信息求解状态最优估值,根据最小二乘原理可以写出如式(6)所示目标函数
 (6)
(6)
若采用单因子自适应滤波减小状态参数向量受异常预报信息的影响,即利用单一自适应因子αk(αk∈[0, 1])实时调整预报向量权阵,此时目标函数应改写为
 (7)
(7)
进一步分析,由于GNSS/声学联合定位模型的状态参数种类较多,可能会面临的问题是,某些历元中部分异常参数影响滤波效果,但该历元其他正常参数提供了真实的动力学信息。如果仍采用单一自适应因子调节所有参数的权阵,正常参数的权值也相应减小,其对滤波估值的贡献也随之损失。此时应基于自适应滤波算法的基本思路不变,采用自适应选权滤波方法进行数据处理。设想按照某种准则,将当前历元的参数分为正常参数和异常参数,分别对每个预报参数构造一个专门的自适应因子ωik(ωik∈[0, 1]),利用所有自适应因子构成的一个自适应因子阵Wk=diag(ωik), i=1, 2, …, n,对预报向量历史权阵进行调整。此时GNSS/声学联合自适应选权滤波算法的解形式应为
 (8)
(8)
由式(8)可知,自适应选权滤波的优势是可以根据每个预报参数的瞬时状态,选择最合适的权值,使较准确的预报信息达到最高的利用率,通过调节异常参数的自适应因子,削弱其对滤波结果的不利影响。
2.2 异常判断及自适应因子构造无论是单因子自适应滤波还是自适应选权滤波算法,都需要解决两个关键问题,即如何判断状态参数异常和自适应因子或自适应因子阵如何构造。合理的判别统计量可以反映出预报参数提供的预报信息与实际运动状态之间的差异,从而构造更优的自适应因子。常用的判别统计量有预测残差统计量、方差分量比统计量、状态不符值统计量等。
以海底应答器坐标参数为例,具体构造判别统计量的时候,针对特定的参数,本文将k时刻预报残差统计量形式写为
 (9)
(9)
式中,v(*)ρk表示新息向量中应答器坐标参数的任一对应项;σvXρk、σvYρk、σvZρk分别表示预测残差协方差矩阵对角线上应答器坐标参数的对应项。
本文利用标准卡尔曼滤波得到的残差结果,计算海底应答器参数对应的方差分量,再结合预报向量协方差矩阵ΣXk中的对角线元素(σ(*)ρk)2,k时刻方差分量比统计量形式如式(10)所示
 (10)
(10)
而对状态不符值统计量的构造形式进行分析可以发现,该统计量不适宜在本文联合模型中作为自适应选权滤波的判别依据。原因是一方面状态不符值统计量依赖于当前历元各参数的最小二乘结果,构造时需要先进行最小二乘解算,但由于GNSS/声学联合模型中单历元内观测信息冗余度并不高,不能保证当前历元每个参数的最小二乘解精度;另一方面因联合模型中状态转移矩阵及过程噪声矩阵的具体设置,部分参数的预报更新过程中没有体现出动力学扰动的影响,导致无法确定参数是否异常,故本文在后续选权滤波算法中不采用状态不符值统计量。
选定合适的判别统计量反映动力学模型误差大小后,针对不同状态的模型参数,需要根据自适应因子函数构造自适应因子,调节对应的权值或权比。常见的自适应因子函数模型包括三段函数、两段函数和指数函数。
三段函数模型[23]
 (11)
(11)
式中,Δ(*)表示依前述任意一种方法构造的判别统计量;c0、c1为阈值常数,根据经验和载体运动特点进行合理取值。
两段函数模型[26]
 (12)
(12)
指数函数模型[27]
 (13)
(13)
式(12)、式(13)中,常数c一般根据经验取值。不同于三段自适应因子函数,两段自适应因子函数和指数自适应因子函数均为非零函数。
本文对于各自适应因子的构造方法见表 1。
| 类型 | 取值方法 |
| 测量船坐标自适应因子ωXk、ωYk、ωZk | 通过判别统计量和自适应因子函数对自适应因子进行判断和构造 |
| 水下应答器坐标自适应因子ωXρk、ωYρk、ωZρk | 通过判别统计量和自适应因子函数对自适应因子进行判断和构造 |
| 姿态角自适应因子ωαk、ωβk、ωλk | 通过判别统计量和自适应因子函数对自适应因子进行判断和构造 |
| 接收机钟差自适应因子ωclkk | 0 |
| 对流层延迟湿分量自适应因子ωzpdwk | 1 |
| 模糊度参数自适应因子ωNik | 1 |
其中,接收机钟差参数由于自身稳定性差,将其设为零权;而附加约束后求出的对流层延迟湿分量及模糊度参数较可靠,故将其自适应因子均直接设为1。针对两种坐标及姿态参数,需要逐历元根据判别统计量和适当的自适应因子函数阈值常数,构造出合理的自适应因子,具体步骤为:
(1) 若采用预报残差作为判别统计量依据,首先需根据Vk=AkXk-Lk计算当前历元的新息向量,结合预测残差协方差矩阵,按式(9)形式构造判别统计量,再通过自适应因子函数确定自适应因子,更新预报向量权阵后,对状态参数进行求解。
(2) 若采用方差分量比作为判别统计量依据,首先应进行标准卡尔曼滤波得到当前历元预报向量对应的残差向量VXk,并计算参数对应的方差因子,再结合预报向量协方差矩阵中对应元素,按式(10)以方差因子之比的形式构造判别统计量,然后判断其所处的阈值范围,通过自适应因子函数确定合理的自适应因子,更新对应的预报向量权阵,再次对状态参数进行求解,得到联合模型的自适应滤波解。
(3) 若采用状态不符值作为单因子自适应滤波的判别统计量依据,首先需解算本历元的最小二乘解
此时所有自适应因子构成的自适应因子阵可以表示为
 (14)
(14)
将式(14)代入式(8)即为GNSS/声学联合自适应选权滤波求解公式。
3 试验验证与分析为了验证和分析自适应滤波算法在GNSS/声学联合定位模型中的应用效果,基于自编软件GNSSer,设计了多组仿真和实测数据试验。滤波初始设置如下:随载体运动而变化,或随机性较强的参数,如测量船天线坐标、发生周跳的卫星模糊度参数等,其对应的状态转移系数设为0;其他变化缓慢的参数,其对应的状态转移系数设为1。初始的状态参数向量取为全零向量,初始系统噪声矩阵中,船载天线坐标参数、姿态参数、应答器坐标参数对应的项分别取为202、12、0.012,伪距或载波相位同类观测量采用高度角定权模型,声学观测量间采用等权模型,声学测距、伪距、载波相位观测量间的方差常数比设为1:10:105,解算过程中,在部分历元内随机增加载体异常扰动,对不同条件下海底应答器位置解算精度进行评估。
3.1 仿真试验海面测量船轨迹如图 2所示,假设海底已布设一个模拟控制点,其平面示意位置如五星符号处所示。海面采用该海域出海约2.5 h所测GPS数据,采样率为1 s。海底测量坐标系以海底模拟控制点参考位置为坐标原点建立,固定其x轴指向。水深设为1500 m,水下声学测量间隔为每秒15次,并顾及声学测距误差和随机噪声。其中声学测距误差由文献[25]中的经验公式得到,随机噪声服从均值为零,方差为5 cm的正态分布。由于测量船处于航向调整或不规则航行时,无法保证平稳运动状态,解算结果会受到载体扰动影响。为更直观地体现自适应因子在滤波中的调节作用,模拟时,随机在前4000历元间、7500~8000历元间、最后500历元间的部分采样间隔内,加入|εa|≤10 m/s2的异常加速度扰动。

|
| 图 2 测量船航迹 Fig. 2 The track of the surveying vessel |
(1) 仿真试验1:本试验是为考察在3种判别统计量的异常判断下,单因子自适应滤波算法对于动力学信息异常的控制能力。自适应因子函数选择两段函数为例,其中,经多次仿真试算,将阈值常数c值取为1,共设计了4种方案:
方案1:常规卡尔曼滤波算法解算海底应答器坐标。
方案2:利用状态不符值统计量进行异常判断,单因子自适应滤波算法解算海底应答器坐标。
方案3:利用预测残差统计量进行异常判断,单因子自适应滤波算法解算海底应答器坐标。
方案4:利用方差分量比统计量进行异常判断,单因子自适应滤波算法解算海底应答器坐标。
4种方案在3个方向上的对比结果如图 3所示。可以看到,在增加载体异常扰动的时段,标准卡尔曼滤波受到的影响较大,结果中呈现异常波动,Y、Z方向上部分历元偏差超过20 m,滤波收敛滞后甚至无法收敛。加入3种判别统计量,改用单因子自适应滤波算法后,动力学模型误差对定位解的影响均得到了不同程度上的控制,表明单因子自适应滤波算法是有效的。单独对比3种统计量判断后进行自适应滤波的结果可以发现,基于方差分量比统计量构造的单因子自适应滤波算法对异常扰动的抑制效果最佳。

|
| 图 3 仿真试验1:不同方案各方向上对比结果 Fig. 3 Simulation experiment 1: the comparative results on each direction of different schemes |
(2) 仿真试验2:本试验是为考察在两种判别统计量的异常判断下,自适应选权滤波算法对于动力学信息异常的控制能力。自适应因子函数选择两段函数为例,阈值常数c取为1.1,测量船坐标和模拟应答器坐标分别进行对应的自适应因子构造,共设计3种方案:
方案1:常规卡尔曼滤波算法解算海底应答器坐标。
方案2:利用预测残差统计量进行异常判断,自适应选权滤波算法解算海底应答器坐标。
方案3:利用方差分量比统计量进行异常判断,自适应选权滤波算法解算海底应答器坐标。
试验在3个方向上的对比结果如图 4所示。当动力学信息出现扰动时,基于预测残差统计量ΔVk或方差分量比统计量

|
| 图 4 仿真试验2:不同方案各方向上对比结果 Fig. 4 Simulation experiment 2: the comparative results on each direction of different schemes |
(3) 仿真试验3:本试验是为考察不同选权构造策略下,自适应选权滤波算法对于动力学信息异常的控制能力。参数异常判别统计量选择更敏感的方差分量比统计量为例,自适应因子函数选择两段函数为例,其中c=1.1,共设计了4种方案:
方案1:常规卡尔曼滤波算法解算海底应答器坐标。
方案2:对测量船坐标进行自适应因子构造,模拟应答器坐标参数视为可靠参数,自适应因子设为1,采用自适应选权滤波算法解算海底应答器坐标。
方案3:对模拟应答器坐标进行自适应因子构造,测量船坐标参数视为可靠参数,自适应因子设为1,采用自适应选权滤波算法解算海底应答器坐标。
方案4:对测量船坐标和模拟应答器坐标参数分别进行自适应因子构造,采用自适应选权滤波算法解算海底应答器坐标。
4种方案分别计算三维点位误差后,对比结果如图 5所示。另分别统计偏差结果的STD(standard deviation)值、RMS(root mean square)值见表 2。
| 方案 | STD/m | RMS/m |
| 方案1 | 4.051 | 4.742 |
| 方案2 | 3.193 | 4.566 |
| 方案3 | 0.859 | 0.992 |
| 方案4 | 0.256 | 0.335 |

|
| 图 5 仿真试验3:不同方案各方向上对比结果 Fig. 5 Simulation experiment 3: the comparative results on each direction of different schemes |
(1) 对比方案2和方案1可知,若保持模拟应答器坐标参数初始的正常权,较之标准卡尔曼滤波,三维坐标偏差结果的STD值和RMS值均有所减小,滤波效果有所改善但不明显,结果不够稳定的情况依然存在,说明对于这个联合定位过程,应答器坐标参数对应的动力学信息描述不准确时,将对结果造成不容忽视的影响。
(2) 由方案3的结果可以发现,应答器坐标参数预报值出现偏差时,对估计结果有直接影响,当模拟应答器坐标参数对应权重进行调整后,三维点位结果STD值和RMS值均不超过1 m,定位稳定性和精度有较明显的提高。
(3) 在联合解算过程中,两类坐标状态参数的估计结果均有可能出现与实际不吻合的情况,方案4在方案3的基础上,对两类坐标参数均进行选权并构造了自适应因子,合理调节了异常动力学信息对模型的影响,从图 5中可以看出,此方案定位滤波基本没有明显的跳跃,结果非常稳定。由表 2可以发现,三维点位偏差结果STD值和RMS值均在0.5 m以内,较之标准卡尔曼滤波算法,STD值减小了93.68%,RMS值减小了92.94%,滤波定位效果显著提升。
3.2 实测试验实测数据来自灵山岛海域试验的后处理结果。试验的日期是2017年12月1日,测量船搭载拓普康HiPer系列GPS天线、加拿大AML公司的SV Plus V2声速剖面仪、加拿大Applanix公司的POS-MV定位定姿系统等传感器在该海域进行了约75 min的海上观测,其中姿态角测量序列平均标准差能达到0.02°,声速剖面仪工作深度能至最深6000 m,声速测量精度为±0.025 m/s,分辨率可达±0.001 m/s。测量船实际走航轨迹及与应答器位置的平面关系如图 6所示。

|
| 图 6 测量船航迹及应答器平面位置 Fig. 6 The track of the surveying vessel and the schematic diagram of the transponder plane position |
测区水深约25 m。水下布设了一个应答器,同次采集返回8个时延观测值。基阵与姿态传感器、姿态传感器与GPS天线、测量船重心与姿态传感器之间的相对位置关系已提前进行了精确测定,可用于船载天线位置与船底换能器位置间的转换。声速剖面仪测量了该水域的声速剖面,包括声速、水温、压力信息。声速剖面信息用于构建声速跟踪模型。试验前先对原始水下声学观测数据进行预处理。首先进行时间配准,将采用UTC时间记录的水下声学数据等与采用GPS时记录的海面卫星观测数据配准,包括时间基准的统一和部分观测时刻的内插外推,以消除此类时延问题的误差影响;然后进行概略的水下最小二乘解算,将异常结果历元剔除,避免明显观测粗差带来的干扰。另由轨迹图可知,本试验中测量船航迹中有较多大幅度转弯作业,运动模型也受诸多异常干扰,类似仿真试验设置,随机在整个观测时段的部分采样间隔内,加入|εa|≤3 m/s2的异常加速度扰动,采用改进后的分层等梯度声速跟踪模型进行波束脚印位置计算,将得到的高精度应答器坐标结果视为参考值。
(1) 实测试验1:类似仿真试验1和仿真试验2,本试验主要考察在实测数据条件下,两种自适应滤波算法对异常动力学信息的调节能力。由仿真试验结果可以看出,较之另外两种判别统计量,方差分量比统计量能更准确地探测出异常参数,故以下试验均选择方差分量比统计量进行异常判断。其中,自适应选权滤波算法中对船载GNSS天线中心坐标参数、姿态角参数、应答器坐标参数分别构造对应的自适应因子,构造函数以三段函数模型为例,其中,阈值常数c0、c1分别取1.1和3.1,共设计了3种方案:
方案1:常规卡尔曼滤波算法解算海底应答器坐标。
方案2:单因子自适应滤波算法解算海底应答器坐标。
方案3:自适应选权滤波算法解算海底应答器坐标。
由于在多个随机观测历元内,试验另加入了载体加速度扰动,导致动力学信息异常影响被放大。由图 7可知,标准卡尔曼滤波算法没有调控能力,整个滤波过程始终存在5~10 m的波动,结果中没有体现出明显的滤波收敛现象。而引入两种自适应滤波算法的方案2和方案3都具备较好的调节适应能力,波动明显减少,定位结果更稳定,这与仿真试验结果一致。一方面,说明在GNSS/声学联合定位模型中引入自适应滤波算法可以有助于抑制状态扰动对结果的影响;另一方面,单因子自适应滤波算法虽然利用单一的自适应因子实现了对整个预报向量权阵的调节,但这样做的后果是,削弱了未发生异常的参数对模型估计结果的贡献,滤波效果提升有限。从图中易发现,方案3较方案2结果更稳定,滤波没有较大的跳跃,精度有明显提升,这是因为自适应选权滤波算法根据不同类型的状态参数,分别构造对应的自适应因子,以自适应因子阵的形式调节预报权阵,更符合自适应的要求,从而有效控制扰动状态对滤波结果的影响。

|
| 图 7 实测试验1:不同方案各方向上对比结果 Fig. 7 Measured experiment 1: the comparative results on each direction of different schemes |
(2) 实测试验2:本试验重点测试不同自适应因子函数对于自适应选权滤波算法效果的影响。共设计3种方案,每种方案中应答器坐标参数均选择同一种自适应因子函数,以两段函数为例,其中c=1.1,而通过改变另外两类参数所选的自适应因子函数进行对比说明。
方案1:船载GNSS天线中心坐标参数和姿态角参数选择三段函数,令其中c0=1.1, c1=3.1,自适应选权滤波算法解算海底应答器坐标。
方案2:船载GNSS天线中心坐标参数和姿态角参数选择指数函数,令其中c=1.1,自适应选权滤波算法解算海底应答器坐标。
方案3:船载GNSS天线中心坐标参数和姿态角参数选择两段函数,令其中c=1.1,自适应选权滤波算法解算海底应答器坐标。
X、Y、Z方向上各方案的对比结果如图 8所示,另分别统计偏差序列的RMS值见表 3。

|
| 图 8 实测试验2:不同方案偏差结果对比 Fig. 8 Measured experiment 2: the comparative results on each direction of different schemes |
| 方案 | RMS | ||
| ΔX | ΔY | ΔZ | |
| 方案1 | 0.096 | 0.051 | 0.142 |
| 方案2 | 0.093 | 0.049 | 0.135 |
| 方案3 | 0.096 | 0.050 | 0.141 |
从图 8和表 3中可以看出,选择不同自适应因子函数的各方案滤波结果基本一致。3种方案各方向上RMS值仅存在毫米级差异,对于现有海底应答器定位精度来说可以视为精度基本相同,说明自适应因子函数的选择对于自适应选权滤波算法在GNSS/声学联合定位滤波中的应用效果影响不大。
综合分析仿真试验和实测试验结果可以发现,基于方差分量比统计量构造自适应因子的自适应选权滤波算法,其仿真试验三维偏差结果STD值和RMS值均在0.5 m以内,实测试验RMS值水平方向不超过0.1 m,且当船载GNSS天线中心坐标参数、姿态角参数、应答器坐标参数分别构造对应的自适应因子时,动力学扰动对结果的影响基本被消除,滤波效果达到最佳。
4 结论在确定海底控制点坐标时,联合GNSS、声学等多源观测信息进行融合处理,更贴近综合PNT体系的核心理念。但当存在异常状态扰动影响时,联合模型的标准卡尔曼滤波解算结果将会出现较大偏差。针对该问题,本文通过引入自适应滤波算法,削弱了异常扰动对结果的影响,进而改善了滤波效果。通过理论分析和试验验证可以得出如下结论:
(1) 由于标准卡尔曼滤波没有自我调节能力,GNSS/声学联合定位过程中出现状态扰动时,常规算法滤波结果将出现较大偏差。引入自适应滤波算法后,削弱了异常扰动对结果的影响,定位稳定性和定位精度均有所改善。在3种参数异常判别统计量中,基于方差分量比统计量构造自适应因子,滤波效果最佳。
(2) 自适应选权滤波算法相较于单因子自适应滤波算法,能更合理地调节预报信息的贡献,定位结果更稳定,滤波效果显著提升。仿真试验三维偏差结果STD值和RMS值均在0.5 m以内,实测试验RMS值水平方向不超过0.1 m,Z方向不超过0.15 m,定位稳定性和定位精度较常规算法均提升了90%以上。
(3) 自适应因子函数的选择对结果几乎无影响,但由于GNSS/声学联合解算模型中涉及多类状态参数,需要根据状态参数个体特点合理构造对应的自适应因子,当根据异常判别结果,分别对船载GNSS天线中心坐标参数、姿态角参数、应答器坐标参数构造对应的自适应因子后,滤波效果提升显著。
| [1] |
杨元喜, 徐天河, 薛树强. 我国海洋大地测量基准与海洋导航技术研究进展与展望[J]. 测绘学报, 2017, 46(1): 1-8. YANG Yuanxi, XU Tianhe, XUE Shuqiang. Progresses and prospects in developing marine geodetic datum and marine navigation of China[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(1): 1-8. DOI:10.11947/j.AGCS.2017.20160519 |
| [2] |
刘经南, 陈冠旭, 赵建虎, 等. 海洋时空基准网的进展与趋势[J]. 武汉大学学报(信息科学版), 2019, 44(1): 17-37. LIU Jingnan, CHEN Guanxu, ZHAO Jianhu, et al. Development and trends of marine space-time frame network[J]. Geomatics and Information Science of Wuhan University, 2019, 44(1): 17-37. |
| [3] |
SPIESS F N. Analysis of a possible sea floor strain measurement system[J]. Marine Geodesy, 1985, 9(4): 385-398. DOI:10.1080/15210608509379536 |
| [4] |
OBANA K, KATAO H, ANDO M. Seafloor positioning system with GPS-acoustic link for crustal dynamics observation:a preliminary result from experiments in the sea[J]. Earth, Planets and Space, 2000, 52(6): 415-423. DOI:10.1186/BF03352253 |
| [5] |
FUJITA M, ISHIKAWA T, MOCHIZUKI M, et al. GPS/acoustic seafloor geodetic observation:method of data analysis and its application[J]. Earth, Planets and Space, 2006, 58(3): 265-275. |
| [6] |
CHEN H H, WANG C C. Optimal localization of a seafloor transponder in shallow water using acoustic ranging and GPS observations[J]. Ocean Engineering, 2007, 34(17-18): 2385-2399. DOI:10.1016/j.oceaneng.2007.05.005 |
| [7] |
BALLU V, BOUIN M N, CALMANT S, et al. Absolute seafloor vertical positioning using combined pressure gauge and kinematic GPS data[J]. Journal of Geodesy, 2010, 84(1): 65-77. |
| [8] |
PURCELL G H J, YOUNG L E, WOLF S K, et al. Accurate GPS measurement of the location and orientation of a floating platform[J]. Marine Geodesy, 1990, 14(3-4): 255-264. DOI:10.1080/15210609009379668 |
| [9] |
SPIESS F N, CHADWELL C D, HILDEBRAND J A, et al. Precise GPS/acoustic positioning of seafloor reference points for tectonic studies[J]. Physics of the Earth and Planetary Interiors, 1998, 108(2): 101-112. DOI:10.1016/S0031-9201(98)00089-2 |
| [10] |
李明. GPS联测海底控制网精度的研究[J]. 武汉测绘科技大学学报, 1992, 17(1): 74-82. LI Ming. Precision investigation for ocean bottom control network using GPS[J]. Journal of Wuhan Technical University of Surveying and Mapping, 1992, 17(1): 74-82. |
| [11] |
邝英才, 吕志平, 蔡汶江, 等. GNSS/声学系统定位精度影响因素分析[J]. 测绘通报, 2018(12): 15-20, 45. KUANG Yingcai, LV Zhiping, CAI Wenjiang, et al. Influence factors analysis of GNSS/acoustic system positioning accuracy[J]. Bulletin of Surveying and Mapping, 2018(12): 15-20, 45. DOI:10.13474/j.cnki.11-2246.2018.0377 |
| [12] |
SUN Wenzhou, YIN Xiaodong, ZENG Anmin. The relationship between propagation time and sound velocity profile for positioning seafloor reference points[J]. Marine Geodesy, 2019, 42(2): 186-200. DOI:10.1080/01490419.2019.1575938 |
| [13] |
孙文舟, 殷晓冬, 暴景阳, 等. 海底控制点定位的半参数平差模型法[J]. 测绘学报, 2019, 48(1): 117-123. SUN Wenzhou, YIN Xiaodong, BAO Jingyang, et al. Semi-parametric adjustment model methods for positioning of seafloor control point[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(1): 117-123. DOI:10.11947/j.AGCS.2019.20180187 |
| [14] |
ZHAO Jianhu, ZOU Yajing, ZHANG Hongmei, et al. A new method for absolute datum transfer in seafloor controlnetwork measurement[J]. Journal of Marine Science and Technology, 2016, 21(2): 216-226. DOI:10.1007/s00773-015-0344-z |
| [15] |
王振杰, 李圣雪, 聂志喜, 等. 水声定位中一种大入射角声线跟踪方法[J]. 武汉大学学报(信息科学版), 2016, 41(10): 1404-1408. WANG Zhenjie, LI Shengxue, NIE Zhixi, et al. A large incidence angle ray-tracing method for underwater acoustic positioning[J]. Geomatics and Information Science of Wuhan University, 2016, 41(10): 1404-1408. |
| [16] |
赵爽, 王振杰, 刘慧敏. 顾及声线入射角的水下定位随机模型[J]. 测绘学报, 2018, 47(9): 1280-1289. ZHAO Shuang, WANG Zhenjie, LIU Huimin. Investigation on underwater positioning stochastic model based on sound ray incidence angle[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(9): 1280-1289. DOI:10.11947/j.AGCS.2018.20170026 |
| [17] |
赵建虎, 陈鑫华, 吴永亭, 等. 顾及波浪影响和深度约束的水下控制网点绝对坐标的精确确定[J]. 测绘学报, 2018, 47(3): 413-421. ZHAO Jianhu, CHEN Xinhua, WU Yongting, et al. Determination of absolute coordinate of underwater control point taking waves and depth's constraint into account[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(3): 413-421. DOI:10.11947/j.AGCS.2018.20170246 |
| [18] |
孙文舟, 殷晓冬, 曾安敏, 等. 附加深度差和水平距离约束的深海控制点差分定位算法[J]. 测绘学报, 2019, 48(9): 1190-1196. SUN Wenzhou, YIN Xiaodong, ZENG Anmin, et al. Differential positioning algorithm for deep-sea control points on constraint of depth difference and horizontal distance constraint[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(9): 1190-1196. DOI:10.11947/j.AGCS.2019.20180514 |
| [19] |
杨元喜. 综合PNT体系及其关键技术[J]. 测绘学报, 2016, 45(5): 505-510. YANG Yuanxi. Concepts of comprehensive PNT and related key technologies[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(5): 505-510. DOI:10.11947/j.AGCS.2016.20160127 |
| [20] |
杨元喜, 李晓燕. 微PNT与综合PNT[J]. 测绘学报, 2017, 46(10): 1249-1254. YANG Yuanxi, LI Xiaoyan. Micro-PNT and comprehensive PNT[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1249-1254. DOI:10.11947/j.AGCS.2017.20170249 |
| [21] |
KUANG Yingcai, LV Zhiping, WANG Junting, et al. The GNSS/acoustic one-step positioning model with attitude parameters[C]//SUN J, YANG C, YANG Y. Proceed-ings of 2019 China Satellite Navigation Conference (CSNC). Lecture Notes in Electrical Engineering, vol 563. Singapore: Springer, 2019: 479-489.
|
| [22] |
邝英才, 吕志平, 陈正生, 等. 基于方差分量估计的多模GNSS/声学联合定位方法[J]. 中国惯性技术学报, 2019, 27(2): 181-189. KUANG Yingcai, LV Zhiping, CHEN Zhensheng, et al. Multi-GNSS/acoustic joint positioning method based on variance component estimation[J]. Journal of Chinese Inertial Technology, 2019, 27(2): 181-189. |
| [23] |
YANG Y, HE H, XU G. Adaptively robust filtering for kinematic geodetic positioning[J]. Journal of Geodesy, 2001, 75(2-3): 109-116. DOI:10.1007/s001900000157 |
| [24] |
KOUBA J, HÉROUX P. Precise point positioning using IGS orbit and clock products[J]. GPS Solutions, 2001, 5(2): 12-28. DOI:10.1007/PL00012883 |
| [25] |
XU Peiliang, ANDO M, TADOKORO K. Precise, three-dimensional seafloor geodetic deformation measurements using difference techniques[J]. Earth, Planets and Space, 2005, 57(9): 795-808. DOI:10.1186/BF03351859 |
| [26] |
杨元喜, 何海波, 徐天河. 论动态自适应滤波[J]. 测绘学报, 2001, 30(4): 293-298. YANG Yuanxi, HE Haibo, XU Tianhe. Adaptive robust filtering for kinematic GPS positioning[J]. Acta Geodaetica et Cartographica Sinica, 2001, 30(4): 293-298. DOI:10.3321/j.issn:1001-1595.2001.04.004 |
| [27] |
YANG Yuanxi, GAO Weiguang. Comparison of adaptive factors in Kalmanfilterson navigation results[J]. The Journal of Navigation, 2005, 58(3): 471-478. |