



2. 贵州宽凳智云科技有限公司北京分公司, 北京 100016
2. Guizhou Kuandeng Zhiyun Science and Technology Co., Ltd., Beijing Branch, Beijing 100016, China
高精地图,国际一般称为高分辨率地图(high definition map,HD Map)或者高度自动驾驶地图(highly automated driving map,HAD Map),国内也称其为自动驾驶地图,是一种面向车辆高级辅助驾驶、自动驾驶及智慧交通的电子地图产品[1]。与导航电子地图相比,高精地图具有更高的精度和更丰富的数据内容,通常包括道路[2]、车道[3-4]、道路上的地面标志物[5]以及交通控制信息[6]。高精地图大约在2014年受到自动驾驶需求的驱动而产生,伴随着自动驾驶的快速发展而逐渐成为研究热点话题。行车环境感知是实现自动驾驶的前提,自动驾驶系统首先需要感知车辆周边的道路交通环境,然后才能规划行车路径,最后通过控制执行实现自动驾驶[7]。因此,智能网联汽车一般安装了各种传感器来实现行车场景环境感知,例如摄像头、GNSS、INS、毫米波雷达、超声波雷达和激光雷达等。但仅依靠传感器还无法实现完整可靠的环境感知,因为传感器自身存在诸多限制。例如传感器的感知范围有限,一般在200 m以内,同时也无法感知位于其视场角(FOV)之外的物体。此外,传感器容易受到恶劣天气和环境噪声的影响而无法正常工作,并且需要高性能的计算、耗电多。高精地图可以作为一种行车基础设施提供全天候超视距的感知,解决传感器感知边界和使用条件受限的问题,增强自动驾驶系统的稳健性。除了应用到环境感知,高精地图还被大量应用到高精度定位和路径规划[8-13]。
尽管很多自动驾驶公司已经开始使用高精地图,但大多采用的是自有格式或者扩展现有格式,只能满足该公司或者特定项目需要,不具备通用性和大规模应用能力[14]。地图行业一般将地图规格划分为3个大的阶段,母库规格、交换规格、物理规格,如图 1所示。规格的简单定义如下:规格=数据模型+存储文件格式。其中存储文件格式有空间数据库、json、ShapeFile等,规格的核心是数据模型(包含表达方式)。

|
| 图 1 高精地图数据处理阶段及对应的规格 Fig. 1 HD maps data processing stage and corresponding format |
母库规格是数据制作阶段采用的规格,利用自动化或者人工的手段从原始采集数据中提取和制作物理世界存在的要素,如车道线、交通标志牌等,然后再生成虚拟的要素,如车道中心线、交通规制信息、车道拓扑关系等。因此在数据模型定义上,需要将物理要素和虚拟要素进行分离,即虚拟要素的表达建立在物理要素之上。
交换规格作为数据交换的规格,在数据模型上与母库规格之间的差异很小甚至没有差异,一般采用ShapeFile或者MIF等GIS数据格式进行存储。ShapeFile格式作为一种通用的空间矢量数据格式,其特点是通过点、线、面表达空间对象的几何形状,同时具备定义属性和关系的能力,但图层的划分、要素形状表达类型和含义、属性字段的详细定义等需要通过数据模型来明确。
在应用阶段,重点关注的不再是数据制作工艺的合理性与便利性,而是数据在终端上的应用效率和数据量大小,因此终端的物理格式往往建立以瓦片(tile)为单位的空间索引和道路要素层级关联关系,并采用二进制化的方式压缩地图的数据量。
总之,高精地图的数据模型和表达方式直接决定了高精地图的制作内容,即制作哪些要素和属性、制作成什么形式,也关系到了高精地图制作工艺,即如何制作,还影响后续的终端物理格式编译及应用方式。因此,通用化、标准化的高精地图数据模型对于推进高精地图规模化发展与应用具有重要作用。
欧美等国家提出的NDS标准格式是一种典型的物理应用格式[15],既有数据模型的精准定义,又有数据表达原则的详细描述。此外,欧美还提出了OpenDRIVE[16]、lanelet[17]等格式,引领了高精地图技术的发展和应用。国内地理信息标准化工作委员会、中国智能网联汽车产业创新联盟自动驾驶地图工作组、中国智能交通产业联盟等也开始着手相关标准制定工作,但进度相对滞后且需进一步协同立场,亟待整合测绘、汽车和交通全行业资源制定具有我国特色的行业统一标准[18]。
综上,目前国内外都缺乏面向数据制作和交换阶段的标准数据模型和表达方式。面对这一现状,本文旨在设计一种通用化高精地图数据模型,并选取最为常见的复杂工况——车道数变化场景,进行车道模型的构建与表达,再通过NDS编译和ADASIS V3[19]应用试验,验证该模型的实用性和有效性。该数据模型可以作为一种高精地图交换格式,也适用于指导数据生产和制作,从而建立连接高精地图制作与应用的桥梁,同时也有利于推进高精地图数据表达的标准化。基于该基础模型,还可以持续扩展,以表达更多要素和应对更多场景。即该模型的通用性体现在3个方面:一方面可以作为通用的交换规格;另一方面可以应用到生产制作的各个阶段;第3方面向下兼容、易于扩展。后续将分为高精地图数据模型、车道模型、车道数变化场景下的车道构建、交通标志物模型、应用与试验等5个部分进行介绍。
1 高精地图数据模型高精地图数据模型是从传统导航地图数据模型发展而来。导航地图一般使用线段(link)抽象道路,使用结点(node)抽象路口,从而构建起经典的点线拓扑模型[20-21],再使用Dijkstra或A*等算法,实现最优路径规划功能[22]。由于高精地图表达的要素更为丰富,其数据模型比导航地图更复杂,一般包括道路网、车道网、交通设施等数据内容的组织与表达[23]。如图 2所示,从左至右十字交叉路口的表达层次由浅入深,最右侧的表达粒度达到了车道级。

目前,国际主流地图数据标准格式有OpenDRIVE和NDS,两者在仿真、导航、自动驾驶等领域受到了广泛应用。面向自动驾驶设计的lanelet模型也具有一定的代表性。下面将对这些主流数据模型展开详细分析。
1.1 OpenDRIVEOpenDRIVE是2006年发起的一种基于XML文件的开放数据格式,广泛应用于仿真领域。OpenDRIVE以道路(road)为核心数据管理单元,车道(lane)、道路设施物(object)、标志(signal)等都挂载在道路实体之下,作为道路的附属属性。在几何表达上,车道等附属要素都以道路参考线为基准进行表达,而不是独立表达。
以车道为例,邻近道路参考线的第1个车道是通过描述相对道路参考线的横向偏移来创建的,下一个车道又是通过相对上一个车道的横向偏移来表达。如图 3所示,红线代表道路参考线,wi(j)表示当前形点i处车道j的车道宽度。面对真实世界中的车道数变化场景,这种方式的表达是非常困难的[25],往往需要进行复杂的特殊处理。

1.2 NDS
NDS格式广泛应用于车载导航领域,其定义的高精地图数据模型主要采用了车道组模型,将车道边界线、车道中心线、车道拓扑关系都纳入车道组的数据结构中,而没有独立的车道概念。NDS通过车道中心线前后连接的拓扑点表达车道拓扑关系。NDS虽然有独立的数据图层概念,分为道路(routing)、车道(lane)、地标(landmark)、障碍物(obstacle)等模块,但是实际上非道路模块(如车道模块和地标模块)必须通过关联道路实体(link)才能得以表达。
因此,NDS格式的车道、地标等关键要素与道路实体的耦合程度很高,这主要是因为它是直接面向终端应用,高耦合的设计方便导航引擎通过道路快速获取关联的各类要素,从而提升数据使用效率。具备高耦合度的数据模型一般具备强格式的特点,需要复杂而专业的数据编译过程才能实现格式转换,逆向转换或者转换到其他格式都比较困难。同时也难以应用到数据采集与矢量化制作阶段。
1.3 LaneLet文献[2]提出了可驾驶的车道区间概念lanelet,被应用到奔驰公司自动驾驶规划系统。lanelets地图包括lanelet、规则元素和驾驶走廊3个模块。如图 4所示,lanelet是可驾驶的车道区间,由左右边界构成,是lanelets地图的最小单元;规则元素是关联在lanelet上的交通规则信息,如交通信号灯、交通标志、路口交通规则等;驾驶走廊是有序的、接续的lanelet序列,是到达目的地的具体驾驶路径。

第1代lanelet定义了一种轻量级的车道模型,驾驶走廊固定了车辆行驶的所有车道及变道位置。第2代lanelet[26]在第1代基础上增加了更多要素,更加体系化,但同时也变得更加复杂。如图 5所示,在拓扑层,通过有向图的方式定义了lanelet的连接关系,包括沿道路通行方向上的车道拓扑关系和垂直于道路通行方向上的车道邻接关系,但两者并未做区分。在关系层,定义了lanelet与规则元素的关联关系,如与限速标志牌的关系。对于每一个实体,如lanelet、面(area)都由物理层的线和点构成。

Lanelet模型也是一种面向应用的数据模型,相对OpenDRIVE和NDS而言,具备独立的车道概念,由左右车道边界线构成。但lanelet模型并没有抽出道路link概念,而只表达车道之间的拓扑关系。并且车道拓扑关系不仅包括车道通行方向上的前后连接关系,还包括允许变道的邻接关系,因此构建的车道拓扑有向图过于复杂,用于车辆变道时效率低下。
综合考虑以上模型的优劣势,提出通用性数据模型需具备的要求如下。
(1) 至少包含道路、车道两级模型,道路与车道独立表达,并建立关联关系。
(2) 车道模型至少包括车道拓扑关系、车道左右边界线、车道属性等内容。
(3) 地标模型与道路、车道建立关联关系,但是耦合度低,不需要依赖道路或车道表达,可以独立表达形状和属性。
(4) 物理要素和虚拟要素分开表达。
基于以上要求,本文提出了一通用化的高精地图数据模型,称为Whu map model。其架构如图 6所示,采用面向对象的建模思想,即分图层分要素的表达。主要分为3大模块:车道模型、地面标志物、交通标志牌。同时也定义了道路模型,建立了道路与车道组之间的关系,但不作为要素的管理单元。道路模型沿用导航电子地图的link-node模型,不做详述。

|
| 图 6 高精地图基础数据模型 Fig. 6 A basic data model of HD maps |
2 车道模型
车道模型是高精地图数据模型中最重要的部分,对于自动驾驶应用而言至关重要。目前已经有高精地图模型方面的理论与整体性研究[27],但尚缺少高精地图车道模型方面的深入分析与研究。因此,本文在第1节的OpenDRIVE、NDS、lanelet等模型分析中也着重介绍了车道模型,一般至少包括车道拓扑关系、车道左右边界线、车道属性等内容的表达。本文设计的Whu map model车道模型包括车道组、车道、车道边界线、车道中心线等4类要素,下面进行详细描述。
2.1 车道组(1) 车道组定义。车道组(lane group)是某一路段上垂直于道路通行方向上一个或多个车道构成的集合。车道组内车道数恒定、且所有车道属于同一条道路、具有相同行驶方向。车道组的概念可以通过式(1)表达
 (1)
(1)
式中,m为车道数;i表达第i个车道。在实际制作过程中,当路段上车道个数无变化时,将此路段上的所有车道编为一组,同时赋予相应的车道编号。当车道数量发生变化时,需要在变化的地方进行打断,形成两个不同的车道组。NDS格式采用了基于车道组的表达方法,如图 7所示,与本文定义的车道组概念一致。

(2) 车道组拓扑关系(lane group topo)。车道组拓扑关系表示前后连接的车道组之间的连接关系,如式(2)所示
 (2)
(2)
式中,LG表示车道组;LGT表示车道组拓扑关系;LGfrom表示进入车道组;LGto表示退出车道组。以图 7为例,车道组0(lane group 0)作为进入车道组时,车道组1(lane group 1)是其退出车道组;车道组1作为进入车道组时,车道组2和3(lane group 2和lane group 3)都是其退出车道组。NDS没有定义车道组之间的拓扑关系,而车道组拓扑关系对于计算车道拓扑、车道级路径规划具有重要作用,因此本文对这一部分内容进行了定义,并在后文车道拓扑关系构建中进行了实际应用。
2.2 车道(1) 车道定义。车道组由车道组成,车道则是一个常用的概念,如式(3)所示
 (3)
(3)
车道通常指的是一个包含左右边界线(即dleft和dright)、宽度大约在3.5 m左右的纵向行驶区间。当人驾驶车辆时,只需要左右边界线作为约束即可实现平稳驾驶。而当自动驾驶时,只有左右车道边界线是不够的,还需要车道的中心线(即式(3)中c)来引领驾驶轨迹,减少实时计算量,实现平滑稳定的驾驶。此外,车道还具有各类交通属性(即式(3)中A),如式(4)所示
 (4)
(4)
式中,A表示各类交通属性;Atype为车道类型;Adirection为通行方向;Arestriction为车道限制信息;Aothers为其他交通属性。车道类型又包括:普通车道、HOV车道、应急车道、加速车道、减速车道、潮汐车道等。车道在交通维度的通行方向信息Adirection,其取值如式(5)所示
 (5)
(5)
式中,s代表直行;l代表左转;r代表右转;sl代表直行加左转;sr代表直行加右转。车道限制信息包括限速、限高和限宽等。其他车道属性还有车道连接类型(表达车道连接信息,如车道生成、车道结束、车道分离、车道合并等信息)、车道宽度等。
(2) 车道拓扑关系。车道拓扑关系与道路拓扑关系类似,表达车道之间的连通关系,可用于车道级的路径规划与导航[28]。其定义如式(6)所示
 (6)
(6)
式中,LT表达车道拓扑关系;Lfrom表示进入车道;Lto表示退出车道;n表达两条车道的车道中心线交点(node)。Lfrom为空时,表示没有进入车道;Lto为空时,表示没有退出车道。车道拓扑关系还可以通过车道中心线及其首尾点构成的拓扑网来表达,两种方式可以相互转化。
2.3 车道边界线(1) 车道边界线定义。车道边界线d(divider)也称为车道分隔线,通常是地面上的涂漆线,例如白色实线、白色虚线、双黄线等。因此需要表达其形状(dgeometry)、颜色(dcolour)、类型(dtype)等属性(datrribute)信息,如式(7)、式(8)所示
 (7)
(7)
 (8)
(8)
此外,属性还包括车道线的可穿行信息dtraversability,例如实线不允许变道、虚线允许变道、左实右虚线只允许从右向左变道、右实左虚线只允许从左向右变道,如式(9)所示
 (9)
(9)
(2) 车道边界线拓扑关系。车道线拓扑关系可采用式(10)的方式进行表达
 (10)
(10)
式中,d代表车道线(divider);dfrom表示进入车道线;dto表示退出车道线。
车道边界线拓扑关系一般较少直接面向终端应用,NDS和OpenDrive中都没有相关定义。但在高精地图制作过程中,车道边界线拓扑关系可以作为中间成果用于车道拓扑关系的生成。基于人工智能深度学习的方法,除了可以提取车道线的形状、线型等信息,采用有向非循环图形模型(DAGMapper)还可以提取高速公路分叉合并处的车道线拓扑关系[29],如图 8所示左侧所示。图 8右侧为车道线拓扑关系展示图,其中蓝点是红色箭头所指的车道线d1与绿色箭头所指的车道线d2交汇后的拓扑点,交汇后的车道线为d3,则交汇前后的车道线拓扑关系可以表达为(d1,d3)和(d2,d3)。

2.4 车道中心线
车道中心线即车道的中心线(centerline),记为c,其表达式为
 (11)
(11)
式中,nstart表示车道中心线的首点;nend表示车道中心线的尾点;Cgeometry表示车道中心线的几何形状,采用形点串的方式表达。
在自动驾驶中,车道中心线往往作为行车轨迹的承载体,因为这种方式可以最大化利用地图的信息从而减少实时计算量。正因如此,车道中心线的表达需要保证合理、连通和平滑。在简单场景下,车道中心线就是车道的几何中心线,即左右边界线之间的几何中心线。但在车道数发生变化的场景,不能简单采用几何中心线作为每个车道的车道中心线,否则会产生车道中心线断裂、距离道路边缘过近等问题,影响自动驾驶使用,如图 9(b)所示。

|
| 图 9 车道数变化场景 Fig. 9 An example of a lane number change scenario |
3 车道数变化场景下车道模型构建
在实际制作和应用过程中,高精地图面临的最大的挑战之一是车道数发生变化场景下车道模型的构建。对于没有车道数变化的简单场景,不存在车道中心线的汇合或者分离,只需考虑纵向上的连接,可认为是一个“一维”问题。而对于有车道数变化的场景,一般存在车道中心线的汇合或者分离,不仅需要考虑纵向的连接,还需要横向上的连接,是一个“二维”问题。所以车道数变化场景是检验数据模型设计优劣的“试金石”,因此本节进行了重点讨论。
为了生成如图 9(c)所示的车道中心线,首先需要参考合理的车道拓扑关系,保证拓扑上连接,然后基于空间约束条件生成平滑的几何形状。因此车道拓扑关系是生成车道中心线的前提和基础,是构建完整并且合理的车道模型的关键。基于本文定义的Whu map model车道模型,通过多种常见车道数变化场景下的车道拓扑构建,来验证模型表达上的有效性和稳健性。
车道数变化场景下车道拓扑构建架构如图 10所示。首先按照是否包含车道线拓扑进行场景的分类。对于包含车道线拓扑的场景可以直接用车道线拓扑去生成车道拓扑。对于不包含车道线拓扑的场景,再细分为有复合箭头和没有复合箭头的场景,前者利用复合箭头提供的通行方向信息生成车道拓扑,后者根据车道中心线航向角变化最小原则来生成合理的车道拓扑关系。

|
| 图 10 车道数变化场景下车道拓扑构建架构 Fig. 10 The architecture of lane topology construction in scenarios where the number of lanes changes |
3.1 含车道线拓扑关系的场景
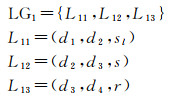
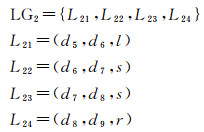
含车道线拓扑关系的场景指的是车道数发生变化的部分存在车道线汇合或分歧的拓扑连接关系。如图 11(a)蓝色结点和红色虚线所示,有2条进入的车道线和1条退出的车道线,表达车道数变化前的左三车道汇入变化后的左二车道。图 11(a)所示的场景是一种典型的车道线“两线合一”场景,可以通过人工或自动化的手段提取出车道线拓扑关系。

|
| 图 11 含车道线拓扑关系的场景 Fig. 11 The scenario with lane divider topology |
基于可提取的物理存在的地图要素,实现的车道表达如下:
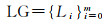
(1) 车道组LG1
式中,s表达车道通向方向是直行。
(2) 车道组LG2
(3) 车道组拓扑(lane group topo)

(4) 车道线拓扑关系(divider topo)
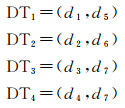
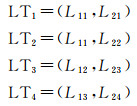
基于车道线所属车道信息,再根据车道线的拓扑关系,可以生成车道拓扑关系。如上例所示,d3和d4都连接d7,而d3是L12和L13的边界线,d4是L13的边界线,d7是L22的边界线,由此可知L12和L13合并汇入L22,车道拓扑关系(lane topo)如下
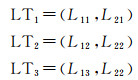
不含车道线拓扑关系的场景,其特点是变化前后的车道形态不对齐、呈犬牙交错状,多见于城市道路场景。该场景下没有明确的车道线拓扑关系,不能采取含车道线拓扑关系的方法进行计算。该场景又可以分为两种子场景:一种是含有复合箭头标识的子场景,可以利用复合箭头表达的车道通行方向信息构建车道拓扑关系;一种是不含复合箭头标识的子场景,根据车道中心线航向角变化最小原则,通过计算车道几何中心线之间的夹角寻找最合适的车道连接关系。
3.2.1 有复合箭头标识场景如图 12(a)所示,车道数变化前左一车道有明确的直行和左转箭头,表明该车道可以连接前面的左转车道和直行车道。因此,合理的车道拓扑关系和车道中心线表达如图 12(b)所示。虽然这种表达方式看似存在一定的缺陷,丢失了图 12(c)黄色线条所示的连接关系,即从下面的中间车道可以稍偏左边向前行驶到左二的直行车道,但是却能构建完整合理的车道模型。此外黄色线条表达直行信息也通过变化后的左三车道进行了表达,即左三车道允许变道到左二车道。如果以图 12(c)的表达方式来,在变化区间内会形成5条车道中心线,5条车道中心线需要对应5个车道,然后变化前是3车道、变化后是4车道,因此会产生车道中心线与车道对应不上的问题。因此,图 12(b)的表达方式满足车道模型建立的要求,也可以满足自动驾驶的应用需求。

|
| 图 12 有复合箭头标识的场景 Fig. 12 The scenario with compound arrows |
对该场景下的车道线等物理存在要素提取,可生成不含车道拓扑关系和车道中心线的车道。再根据车道线的打断位置,可以在横向上生成车道组,如图 13所示,红色方框内是车道组1,绿色方框内是车道组2。详细可实现的车道表达如下。

|
| 图 13 有复合箭头标识场景的车道数据表达 Fig. 13 The lane data description of the scenario with compound arrows |
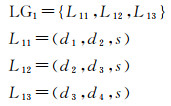
(1) 车道组LG1
(2) 车道组LG2
(3) 车道组拓扑

根据车道的通行方向信息,可以生成车道拓扑关系。如上示例中,LG2比LG1多一个车道,LG1中的L11的通行方向信息是sl,即直行和左转,LG2中只有L21的通行方向信息是L左转,且其右一个车道L22是s,直行,由此可知,L11分歧出L21和L22。车道拓扑关系如下
无复合箭头标识的场景如图 14(a)所示,此时除了可以将左一车道作为分歧车道,还可以将左二车道和左三车道作为分歧车道,如图 14(b)、(c)所示。为了保障自动驾驶汽车安全舒适地行驶,需要车道中心线尽可能减少航向角的变化。因此通过计算车道中心线的航向角,选取变化最小的结果表达拓扑关系。如图 15所示,首先计算出变化前后所有车道的几何中心线,如红线所示,然后对于变化后的每一条车道的几何中心线,依次连接变化前的每一条车道的几何中心线,如蓝线所示,同时计算连接后形成的夹角,如黑色角θ所示(0<θ≤180°)。

|
| 图 14 无复合箭头标识的场景 Fig. 14 The scenario without compound arrows |

|
| 图 15 车道几何中心线航向角计算 Fig. 15 The calculation of heading angles of lane geometric centerlines |
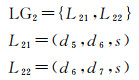
θ越大,即越接近180°,表示航向角变化越小,车道中心线的角度变化也越小。所以对变化前后数量更多一方的每一车道,选取θ最大时连接的车道作为拓扑连接车道,如图 15黄色所示。所以合适的车道拓扑关系即图 14(b)所示。构成的车道拓扑关系如下
该表达原则仍存在不足之处,并没有表达所有通行的可能性,下方的最左侧车道依然可以行驶到上方的左二直行车道,而不是只能行驶到上方左一的左转车道。但从几何形态和驾驶体验来说,航向角最大的方案是驾驶最平滑的方案。同时基于此模型,可以提前进行合理路径规划,规避上述问题。
3.2.3 混合场景在城市道路场景中可能还会遇到更为复杂的车道变化路段,例如在同一个路段既有车道线拓扑关系的变化,也无车道拓扑关系的变化,如图 16(a)所示。此时需要进行分拆处理,首先根据已有的车道线拓扑关系构建该部分的车道拓扑关系。对剩下的部分采取无车道线拓扑关系场景下的处理。示例结果如图 16(b)所示。

|
| 图 16 混合变化场景 Fig. 16 Hybrid change scenario |
4 交通标志物模型 4.1 地面标志物模型
地面标志物指的是地面上起到交通指示或传递某种交通信息的标志物,包括了地面箭头、文字以及各类符号。如式(12)所示
 (12)
(12)
式中,R表示地面标志物;Rtype表示地面标志物类型,如箭头、文字、导流带等。对于各类形态各异的地面标志物,一般采用矩形的包围盒表达其轮廓。部分标志物具有明显的语义信息,例如地面上的限速数字,以及标识公交车道或者应急车道的文字,因此需要预留表达语义信息的字段,式(12)中使用Rsemantic来表达。Rassociation表达地面标志物与道路、车道的关联关系,将在4.3节进行统一描述。
对于包围盒的表达包括两种,一种是垂直于道路行驶方向的包围盒,一种是基于地面标志物自身形状的最小包围盒。前者按要素的最外边缘绘制出横平竖直的矩形框,本文称为坐标矩形框;后者需要参照要素的骨架线来构建最小外接包围盒,本文称为骨架矩形框。大多数情况下,两者的表达是相同的。少数情况有所差异,如图 17所示,对于具有一定倾斜度的直箭头,两种包围盒的表达有所不同。虽然两种方式都具有扩大标志物实际范围的效果,但显然骨架矩形框扩大的范围小于坐标矩形框。包围盒作为高精地图精细化表达方式之一,需要根据应用需求明确表达方式。例如为尽量避免矩形框扩大表达范围而与车道线相交,应该选取骨架矩形框的表达方式。

|
| 图 17 地面箭头的包围盒 Fig. 17 Bounding boxes of road arrows |
4.2 交通标志牌模型
交通标志牌是道路交通中非常常见的交通信息承载体,为了方便驾驶员,一般设置在道路上方1~3 m之间。按照国标GB 5768《道路交通标志和标线》的定义[30],道路交通标志是以颜色、形状、字符、图形等向道路使用者传递信息,用于管理交通的设施。通过交通标志提供准确及时的信息和引导,使道路使用者顺利快捷地抵达目的地,促进交通顺畅和行车安全。本文提出的交通标志牌模型使用式(13)来进行表达
 (13)
(13)
式中,Msign表示交通标志牌;Mtype表达交通标志牌的类型,包括警告标识、禁令标识、指示标志、指路标志等;Msubtype表达详细子类,国内约有100多种,如限速、禁止左转、注意横风等;Mboundingbox表达交通标志牌外接矩形框(即包围盒)。随着人工智能技术在激光点云和图像融合感知方面的应用,标志牌矩形框的自动化提取效率不断提高,如图 18所示。基于提取之后的外界矩形框,还可以通过中心点坐标结合长度、宽度或者半径等的方式来表达交通标志牌的形状。

|
| 图 18 交通标志牌的包围盒表达 Fig. 18 Bounding boxes of traffic signs |
Isemantic表达交通标志牌的语义信息。对于限速、限宽、限高等影响驾驶决策的标志牌,经常与时间段、车种、天气等条件关联,如图 19所示。为了准确表达其语义信息,采取式(14)的表达方式
 (14)
(14)

|
| 图 19 复杂交通标志牌 Fig. 19 Complex traffic signs |
交通标志牌语义信息包括限制类型Irestrictiontype、限制道路类型Iroadtype、内容Icontent、限制时间Itime、限制车辆类型Ivehicle、限制天气Iweather等。
在图 19展示的场景中,还包括多块交通标志牌联合在一起表达的情况,如“限速120”“小型车”“限速40”“匝道”。为了支持该场景的表达,采用式(15)表达标志牌之间的关联关系Ssignrelation
 (15)
(15)
式中,Ssigni和Ssignj分别代表不同的标志牌。关系类型Ssignrelationtype分为包含关系Sincluding、组合关系Scombination等,如式(16)所示
 (16)
(16)
在自动驾驶中,仅依靠车辆传感器来感知环境的另一个问题是,尽管传感器通常能够捕获车辆周围的道路交通设施,但很难确定该交通设施作用的对象和范围。例如,摄像机可以在其视场角范围内检测到限速标志,但是该标志可能作用的是相邻的另外一条道路。如图 20所示,虽然限速牌立在当前高速道路的右侧,但实际上它表达的是右前方匝道的限速。又如在城市场景中具有多个交通信号灯的路口内,摄像机难以识别出每个交通信号灯实际控制的道路或车道。作为一种先验知识,高精地图可以预先制作每个车道的限速信息,或者建立限速标志、交通信号灯与道路、车道之间的连接关系。因此,通过高精地图就能直接获得每条道路每个车道的限速信息以及关联的各种交通设施。

|
| 图 20 限速标志和指示标志组合使用 Fig. 20 Combination of speed limit sign and indication sign |
地面标志物和交通标志牌与道路、车道之间的关联关系,通过式(17)表达
 (17)
(17)
式中,Troad表示关联的道路;Tlane表示关联的车道;Tgeo_range表达关联的地理范围;Teffect_range表达作用范围。地理范围和作用范围既可以是一个位置点,也可以是一个连续区间。如图 20所示,限速40的标志牌和右转箭头的辅助标志牌,它们的地理范围即实际所在的地理位置,位于高速公路主路右侧,作用范围则是右前方的匝道。当出现关联多条道路或者多个车道时,可以通过增加关联关系的个数来表达。
5 应用试验为进一步验证该数据模型的有效性,进行了大规模数据制作与应用试验。首先,将基于该模型设计而成的高精地图母库规格,应用于自动化与人工作业结合的生产平台,实现了大规模的高精地图数据制作,数据场景涵盖高速公路、城市道路、港口园区等各类场景。然后,基于该模型设计而成的高精地图交换规格,以SHP格式数据文件为载体,生成高精地图交换格式数据。考虑到NDS和OpenDRIVE作为物理规格应用的广泛性,再将高精地图交换格式数据编译到NDS、OpenDRIVE格式,如图 21和图 22所示。最后,通过基于ADASIS V3标准的电子地平线试验,验证了数据模型的有效性。自动驾驶汽车需要从自车的角度来感知环境,为了将高精地图应用于自动驾驶感知系统,需要从以地图为中心的视图切换到以车辆为中心的视图,这种从行车视角获取所需地图数据的使用方式被称为电子地平线[31]。电子地平线大大减少了需要传输的车道拓扑网络数据量,从而可以有效地应用高精地图。随着车辆继续前进,可以在删除旧的电子地平线数据的同时,动态生成新的电子地平线数据。同时可以基于车道级路线规划的结果来生成电子地平线。

|
| 图 21 Whu map model数据模型编译到NDS 2.5.4格式地图 Fig. 21 NDS 2.5.4 map compiled from Whu map model |

|
| 图 22 Whu map model数据模型编译到OpenDrive 1.4H格式地图 Fig. 22 OpenDrive 1.4H map compiled from Whu map model |
按照欧洲ADASIS协会定义的ADASIS V3标准,生成的电子地平线可视化如图 23(a)、(c)、(e)所示,红色首尾点的白色线段是地面上的虚线,白色实线是地面上的白实线,两者之间的灰色实线是车道中心线,红色实线则是道路靠外侧的应急车道线。由图 23(a)、(b)可以看出车辆在当前道路的最左侧车道,前方道路地面上有印刷文字,地图中采用青色矩形框表达其外轮廓。当车辆行驶一小段后准备变道,到达图 23(c)、(d)的位置,此时地图数据发生增长。变道完成之后,又行驶了一小段距离到达图 23(e)、(f)的位置,地图继续增长以满足自动驾驶感知需求。可以看出高精地图数据很好地支持了基于车辆位置变化的电子地平线输出。试验中,电子地平线硬件采用恩智浦S32V,进行了680多项测试,记录了每个步骤的时间消耗,其平均值统计见表 1。由表 1结果可以看出,从接收需求到生成、传输,整个过程平均耗时小于100 ms,达到了实时应用的效果,同时也验证了数据及软件的可用性与有效性。

|
| 图 23 电子地平线 Fig. 23 Electronic Horizon |
| 大类 | 子类 | 耗时/ms |
| 1计算 | 1.1更新需求 | 60 |
| 1.2生成电子地平线 | 0.3 | |
| 2电子地平线消息构建与传输 | 2.1构造路径控制消息(path control)并传输到电子地平线重构器(electronic horizon reconstructor) |
0.000 503 |
| 2.2构造配置文件控制消息(profile control)并传输到电子地平线重构器 | 4 | |
| 2.3构造配置文件消息并传输到电子地平线重构器(每5秒钟) | 5 |
6 总结
高精地图已成为自动驾驶必不可少的基础设施之一,但在数据制作和交换阶段,尚未形成统一的数据模型和表达方法,制约了高精地图的规模化发展与应用。针对这一问题,本文在分析和总结NDS、OpenDRIVE、lanelet等模型特点的基础上,提出了一种通用化的高精地图数据模型及表达方法。首先,车道模型方面,采用车道组为管理单元,将同一路段上相同行驶方向的车道归为一组。车道组由车道构成,车道由车道的左边界线、右边界线、车道中心线、车道属性构成。车道属性包括车道的类型、车道限制信息等。当一个车道组的某个车道连接下一个车道组的某个车道时,可以通过表达进入车道和退出车道的车道对来构建车道拓扑关系。然后通过多种常见车道数变化场景下的车道拓扑构建,验证了模型表达上的有效性。具体包括有车道线拓扑关系的场景、无车道线拓扑关系的场景以及两者的混合类型。含有车道线拓扑关系的场景,可以应用车道线拓扑关系来生成车道拓扑关系;不含车道线拓扑关系的场景,根据复合箭头提供的车道通行方向信息以及车道中心线航向角变化最小原则,来生成合理的车道拓扑关系。交通标志物的数据模型方面,主要定义内容包括类型、包围盒、语义以及与道路、车道的关联关系。最后,按照本文提出的数据模型,完成了大范围的高精地图数据制作,并且成功编译到了NDS及OpenDRIVE等标准物理格式,同时应用到ADASIS V3电子地平线产品,取得了良好效果,进一步验证了模型的实用性和有效性。
| [1] |
SEIF H G, HU Xiaolong. Autonomous driving in the iCity—HD maps as a key challenge of the automotive industry[J]. Engineering, 2016, 2(2): 159-162. DOI:10.1016/J.ENG.2016.02.010 |
| [2] |
BENDER P, ZIEGLER J, STILLER C. Lanelets: Efficient map representation for autonomous driving[C]//Proceedings of 2014 IEEE Intelligent Vehicles Symposium Proceedings. June 8-11, 2014, Dearborn, MI, USA: IEEE, 2014: 420-425.
|
| [3] |
SCHINDLER A. Vehicle self-localization with high-precision digital maps[C]//Proceedings of 2013 IEEE Intelligent Vehicles Symposium Workshops (Ⅳ Workshops). June 23-23, 2013, Gold Coast, QLD, Australia: IEEE, 2013: 134-139.
|
| [4] |
KIM C, JO K, CHO S, et al. Optimal smoothing based mapping process of road surface marking in urban canyon environment[C]//Proceedings of the 14th Workshop on Positioning, Navigation and Communications (WPNC). October 25-26, 2017, Bremen, Germany: IEEE, 2017: 1-6.
|
| [5] |
RANGANATHAN A, ILSTRUP D, WU Tao. Light-weight localization for vehicles using road markings[C]//Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. November 3-7, 2013, Tokyo, Japan: IEEE, 2013: 921-927.
|
| [6] |
QU Xiaozhi, SOHEILIAN B, PAPARODITIS N. Vehicle localization using mono-camera and geo-referenced traffic signs[C]//Proceedings of 2015 IEEE Intelligent Vehicles Symposium (Ⅳ). June 28-July 1, 2015, Seoul, Korea (South): IEEE, 2015: 605-610.
|
| [7] |
JO K, KIM J, KIM D, et al. Development of autonomous car—part Ⅰ: distributed system architecture and development process[J]. IEEE Transactions on Industrial Electronics, 2014, 61(12): 7131-7140. DOI:10.1109/TIE.2014.2321342 |
| [8] |
MATTERN N, SCHUBERT R, WANIELIK G. High-accurate vehicle localization using digital maps and coherency images[C]//Proceedings of 2010 IEEE Intelligent Vehicles Symposium. June 21-24, 2010, La Jolla, CA, USA: IEEE, 2010: 462-469.
|
| [9] |
SCHREIBER M, KNÖPPEL C, FRANKE U. LaneLoc: Lane marking based localization using highly accurate maps[C]//Proceedings of 2013 IEEE Intelligent Vehicles Symposium (Ⅳ). June 23-26, 2013, Gold Coast, QLD, Australia: IEEE, 2013: 449-454.
|
| [10] |
ZIEGLER J, LATEGAHN H, SCHREIBER M, et al. Video based localization for Bertha[C]//Proceedings of 2014 IEEE Intelligent Vehicles Symposium Proceedings. June 8-11, 2014, Dearborn, MI, USA: IEEE, 2014: 1231-1238.
|
| [11] |
JO K, JO Y, SUHR J K, et al. Precise localization of an autonomous car based on probabilistic noise models of road surface marker features using multiple cameras[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(6): 3377-3392. DOI:10.1109/TITS.2015.2450738 |
| [12] |
CHEN Xiao, HU Weidong, ZHANG Lefeng, et al. Integration of low-cost GNSS and monocular cameras for simultaneous localization and mapping[J]. Sensors, 2018, 18(7): 2193. DOI:10.3390/s18072193 |
| [13] |
JANG C, CHO S, JEONG S, et al. Traffic light recognition exploiting map and localization at every stage[J]. Expert Systems With Applications, 2017, 88: 290-304. DOI:10.1016/j.eswa.2017.07.003 |
| [14] |
AEBERHARD M, RAUCH S, BAHRAM M, et al. Experience, results and lessons learned from automated driving on Germany's highways[J]. IEEE Intelligent Transportation Systems Magazine, 2015, 7(1): 42-57. DOI:10.1109/MITS.2014.2360306 |
| [15] |
NDS. NDS open lane model 1.0 release[EB/OL]. [2017-5-11]. http://www.openlanemodel.org/
|
| [16] |
ASAM. OpenDRIVE v1.6 format specification[EB/OL]. [2020-1-14]. https://www.asam.net/
|
| [17] |
BENDER P, ZIEGLER J, STILLER C. Lanelets: Efficient map representation for autonomous driving[C]//Proceedings of 2014 IEEE Intelligent Vehicles Symposium Proceedings. June 8-11, 2014, Dearborn, MI, USA: IEEE, 2014: 420-425.
|
| [18] |
刘经南, 詹骄, 郭迟, 等. 智能高精地图数据逻辑结构与关键技术[J]. 测绘学报, 2019, 48(8): 939-953. LIU Jingnan, ZHAN Jiao, GUO Chi, et al. Data logic structure and key technologies on intelligent high-precision map[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(8): 939-953. DOI:10.11947/j.AGCS.2019.20190125 |
| [19] |
ADASIS AISBL. ADASIS V3.1 specification[EB/OL]. [2020-1-7]. https://adasis.org.
|
| [20] |
张攀, 郑珂, 王军德, 等. 拓扑模型下的导航地图道路曲率引入[J]. 测绘通报, 2015(11): 52-56. ZHANG Pan, ZHENG Ke, WANG Junde, et al. Introducing road curvature into navigation map based on topological model[J]. Bulletin of Surveying and Mapping, 2015(11): 52-56. |
| [21] |
徐敬海, 李清泉, 宋莺, 等. 基于Kiwi数据格式的地图显示研究[J]. 武汉大学学报(信息科学版), 2005, 30(10): 866-869. XU Jinghai, LI Qingquan, SONG Ying, et al. Research on map displayment based on kiwi data format[J]. Geomatics and Information Science of Wuhan University, 2005, 30(10): 866-869. |
| [22] |
ZENG W, CHURCH R L. Finding shortest paths on real road networks: the case for A[J]. International Journal of Geographical Information Science, 2009, 23(4): 531-543. DOI:10.1080/13658810801949850 |
| [23] |
LIU Jingnan, ZHAN Jiao, GUO Chi, et al. Data logic structure and key technologies on intelligent high-precision map[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(3): 1-17. |
| [24] |
蒋捷, 韩刚, 陈军. 导航地理数据库[M]. 科学出版社, 2003. JIANG Jie, HANG Gang, CHEN Jun. Navigable database[M]. Beijing: Science Press, 2003. |
| [25] |
ALTHOFF M, URBAN S, KOSCHI M. Automatic conversion of road networks from OpenDRIVE to lanelets[C]//Proceedings of 2018 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI). Singapore: IEEE, 2018: 157-162.
|
| [26] |
POGGENHANS F, PAULS J H, JANOSOVITS J, et al. Lanelet2: a high-definition map framework for the future of automated driving[C]//Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI, USA: IEEE, 2018: 1672-1679.
|
| [27] |
詹骄, 郭迟, 雷婷婷, 等. 自动驾驶地图的数据标准比较研究[J]. 中国图象图形学报, 2021, 26(1): 36-48. ZHAN Jiao, GUO Chi, LEI Tingting, et al. Comparative study on data standards of autonomous driving map[J]. Journal of Image and Graphics, 2021, 26(1): 36-48. |
| [28] |
祖似杰, 张攀, 罗跃军. 基于车道驾驶态势的拓扑构建与路径规划[J]. 地理空间信息, 2018, 16(5): 53-56, 9. Zu Sijie, Zhang Pan, Luo Yuejun. Topology construction and route planning based on lane driving condition[J]. Geospatial Information, 2018, 16(5): 53-56, 9. DOI:10.3969/j.issn.1672-4623.2018.05.015 |
| [29] |
HOMAYOUNFAR N, LIANG J, MA W C, et al. DAGMapper: learning to map by discovering lane topology[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Seoul, Korea (South): IEEE, 2019: 2911-2920.
|
| [30] |
国家质量技术监督局. 中华人民共和国国家标准: 道路交通标志和标线GB 5768—1999[S]. 北京: 中国标准出版社, 1999. State Bureau of Quality and Technical Supervision of the People's Republic of China. National Standard (Mandatory) of the People's Republic of China: Road traffic signs and markings. GB 5768—1999[S]. Beijing: Standards Press of China, 1999. |
| [31] |
DUREKOVIC S, SMITH N. Architectures of map-supported ADAS[C]//Proceedings of 2011 IEEE Intelligent Vehicles Symposium (Ⅳ). Baden-Baden, Germany: IEEE, 2011: 207-211.
|