



2. 西安测绘研究所, 陕西 西安 710054;
3. 信息工程大学, 河南 郑州 450001
2. Xi'an Research Institute of Surveying and Mapping, Xi'an 710054, China;
3. Information Engineering University, Zhengzhou 450001, China
海底大地基准网是水下导航定位、海底板块运动、海洋环境调查的基础,是海洋地质研究与海底资源勘探的重要支撑[1-3]。美国、加拿大、俄罗斯和日本等发达国家早已开启了海底大地基准网相关研究,并已基本掌握海底大地基准建立与维护技术[4-10]。虽然我国经过几代大地测量工作者的努力,建立了相对完善的陆地大地基准网[11-13],但海底大地基准网建设仍处于起步阶段。
精确测定海底大地基准点坐标是海底大地基准网建设的核心目标。确定海底大地基准点坐标最常用的方法是海面GNSS测量与水声声学测距相结合的方法[4, 10]。通过GNSS测量得到载体GNSS天线位置,利用姿态测量数据和GNSS天线到换能器的偏差数据,将GNSS天线位置归算到声学换能器的位置,再利用声学测距数据经处理得到海底大地基准点的位置[14-15]。这种方法测定的海底大地基准点的位置精度主要受GNSS观测误差和声速的不确定性所引起的测距误差的影响[6, 16]。利用GNSS事后差分、精密单点定位可获得测量船轨迹厘米级的三维坐标[17],相对于水声声学测距的分米级误差而言,测量船轨迹厘米级误差不是主要误差源。众所周知,水声声学测量中存在声线弯曲和声速变化误差[18],声线弯曲误差与复杂的海洋环境和测量入射角有关[19],声速变化误差与波场、发射和接收换能器之间的距离以及共振频率有关[20]。声线弯曲误差的影响可采用声学信号延迟修正模型来改正,如应用测量区域中的加权声速参数改正[21]、等效声速剖面[22-23]、有效声速模型[24]等可补偿声线弯曲误差,也可通过声线跟踪或自适应分层来进行声线弯曲校正[25-28]。无论是通过测量标定还是模型修正进行补偿,都需要获得测量时间和测量区域内的声速剖面信息,然而声速剖面测量本身具有明显的不确定性和时空变化特性。此外,对声速测距误差可进行参数化建模,将测距误差模型参数与基准点坐标作为待估参数同时解算,通过模型参数吸收测距系统误差的影响[2, 29-30]。有学者认为测距系统误差是由水声声速偏差引起的,将声速偏差作为待估参数同位置参数一并解算[11, 30],也有学者将每个历元的测距误差作为待估参数,利用半参数平差模型来控制声速变化引起的测距误差的影响[31];如有先验声速或者声线弯曲参数可用,可将它们引入观测模型[32]。考虑到相邻历元的观测环境基本一致,声速测距误差变化也应不大,借鉴GNSS差分思想,可对水声测距时延观测量进行历元间差分,削弱测距系统误差的影响,进而提高海底大地基准点水平位置估计精度[30, 33]。由于GNSS测量加水声声学测距的方法仅能在海底大地基准点上方的水面进行观测,因而具有天然的观测不对称性[14, 34],以此估计的位置参数的垂直分量的精度往往偏低。为改善基准点垂直分量的精度,有学者提出了顾及波浪影响和深度约束的水下基准点位置确定模型[35-36],附加深度差和水平距离约束的差分定位算法也得以研究[37]。差分算法得以有效应用的前提是相邻路径上的误差基本一致,声线传播路径上的共同误差通过差分得以削弱。观测模式直接决定了海底基准点定位确定的几何观测强度,也是影响基准点坐标精度的一项主要因素。日本学者提出的船痕漂流测量网型[7-8],直线方式[38-39]和圆走航方式[6, 11, 40]也是测量模式的较好选择。圆走航方式具有近似平面观测对称性,过顶的十字直线走航方式,同样具有良好的观测对称性,均有利于削弱归心参数误差、声速误差、声线弯曲等系统误差的影响[3]。圆走航模式下的差分算法虽然削弱了大部分共同误差的影响,但明显弱化了观测设计矩阵结构。
本文针对圆走航模式下水下大地基准点的定位效能进行系统分析。首先依据声速剖面的变化规律,讨论声学测距非差定位模型和削弱系统误差影响的历元间差分定位模型;然后分析圆走航模式下非差、差分定位模型对参数分量的可估性;从精度最优条件出发,分别推导确保平面位置、深度以及三维位置精度的最佳测量半径;从系统误差角度分析测距系统误差对定位结果的影响;最后利用仿真和深海实测数据验证了定位效能。
1 声学测距观测方程水声时延测距的观测方程[33]为
 (1)
(1)
式中,ρi, j表示第i次测量载体换能器与海底应答器j间的水声时延测距观测量;f(xi, xj)表示第i次测量载体换能器与海底应答器j间的直线距离;xi表示第i次测量载体换能器的位置;xj表示海底应答器j的位置;δρvd, i表示海底应答器固有测距误差;δρvb, i表示由背景声速剖面测量不确定性引起的测距误差;δρvl, i表示由潮汐、温度等日变化引起的长周期项测距误差;δρvs, i表示由内波引起的短周期项测距误差;εi, j表示随机误差。
式(1)中系统误差参数δρvd, i、δρvb, i、δρvl, i和δρvs, i的系数均为1。如果没有附加先验信息,这些不同类型的系统误差参数将无法分离,即无法同时解算。通常,采用一个综合性误差来统一表达这些误差参数,即
 (2)
(2)
这样,水声时延测距的观测方程可简化为
 (3)
(3)
水声时延测距观测数据处理中,采用当地水平坐标系ENU有助于分析系统误差对坐标分量的影响,为方便描述,后文均采用当地水平坐标系。其中,n和e分别表示北分量和东分量,u表示天顶分量。
通过GNSS测量可实时得到测量船GNSS天线位置,利用姿态测量值和声学换能器相对于GNSS天线的相对位置,很容易得到第i次测量时声学换能器坐标xi=[nT, (t)eT, (t)uT, (t)]T。设海底应答器j的坐标为xj=[nP eP uP]T,若将坐标可写成初值加改正量的形式,则有
 (4)
(4)
式中,xj, 0为海底应答器j的坐标初值;xj, 0=[nP, 0 eP, 0 uP, 0]T;dxj为海底应答器j的坐标改正量;dxj=[dnP deP duP]T。
在xj=xj, 0处对式(3)展开,有
 (5)
(5)
式中,
 (6)
(6)
f(xi, xj, 0)表示换能器i到应答器j近似位置之间的直线距离,即
 (7)
(7)
如果预先通过外部校准或经验模型校正了系统误差项,可利用先验系统误差δρd改正实际观测量,则定位模型式(3)的误差方程为
 (8)
(8)
式中,
但是在实际应用中,特别是在复杂的海洋环境中,一般无法精确得到系统误差,可将综合系统误差δρd作为待估参数,与海底应答器位置一同估计。式(3)对待估参数xj、δρd,i求偏导,则其误差方程为
 (9)
(9)
式中,
考虑到我国周边海域大部分水深不超过4000m,海底大地基准点位置确定所进行的测量范围通常在数千米半径内进行,在整个观测过程中测量换能器的高程分量变化范围一般在几十厘米。即使确定万米水深海底基准点位置,在整个观测过程中换能器位置的高程变化也不大。如测量轨迹是以海底应答器为中心的圆,则式(8)、式(9)中设计矩阵ai, j的u分量元素几乎为一常值,而


在复杂的海洋环境中,无法得到精确的系统误差值,建立差分观测方程通常是削弱系统误差影响的一种较合理的方法。通过历元差分可大大减小相邻历元观测模型中的同类系统误差[33]。一般情况下,第i、i+1次测量的时间相近,并且测量母船的位置变化也不大,前后历元的水声测距的各项系统误差也基本相同,即有
 (10)
(10)
前后历元的综合性系统误差也基本相等,则近似有
 (11)
(11)
借鉴GNSS差分思想,对水声测距误差方程进行历元差分[33],则式(1)组成的单差观测方程为
 (12)
(12)
类似前述推导,历元间差分误差方程可整理为
 (13)
(13)
式中
 (14)
(14)
 (15)
(15)
显然,前后历元的系统误差项δρd, i、δρd, i+1大部分值被差分消除了,系统误差对参数估计的影响得到显著减弱。同时,由于连续两次测量时间非常接近,声学换能器的位置变化小,会有ai+1, j≈ai, j,即历元差分后Δai, j≈0,如此可能会导致式(13)的设计矩阵病态。特别是圆走航时,前后历元声学换能器的垂直分量小,差分后设计矩阵Δai, j的u分量几乎被差掉了,会导致u分量不可估。
将每个观测历元的综合系统误差δρd作为待估参数,非差误差方程式(9)进行历元间差分,其误差方程为
 (16)
(16)
如前所述,第i、i+1次测量的时间相近,观测环境相近,其综合系统误差也应基本一样,即
 (17)
(17)
可以看出,差分后误差方程式(16)、式(17)的设计矩阵病态。同样,综合系统误差的设计矩阵系数近似为零,系统误差参数也不可估,即式(16)、式(17)无法解出正常解。
2 圆走航观测模式分析无论采用非差观测定位模型,还是历元间差分观测模型,其所有声学测距数据所组成的误差方程可简写为
 (18)
(18)
式中,V为残差;A为设计矩阵;L为观测向量。
2.1 圆走航模式下几何强度分析在圆走航模式下,以声学应答器为圆心进行测量(图 1)。设γ为第i次测量声学测距与垂线方向的夹角,βi为测量半径方向与水平坐标系E轴的夹角,则非差定位模型式(9)的设计矩阵可写为
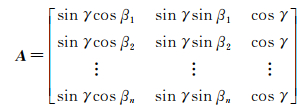 (19)
(19)

|
| 图 1 测距示意 Fig. 1 Ranging diagram |
圆走航模式下,水声测距观测可近似认为是等权观测,则非差观测定位模型的法矩阵N为
 (20)
(20)
进行完整整周测量时,有
 (21)
(21)
式中,
非差观测定位模型的精度衰减因子DOP为
 (22)
(22)
在圆走航模式下,相邻历元声学测距与垂线方向的夹角没有变化,即γi=γi+1,对前后历元进行差分,其总误差方程的设计矩阵变为
 (23)
(23)
在不考虑观测量之间相关性的前提下,历元间单差观测定位模型的N矩阵为
 (24)
(24)
顾及圆走航的测量航迹为圆弧,可知有
 (25)
(25)
单差观测定位模型其平面精度衰减因子HDOP为
 (26)
(26)
可以看出,圆走航模式下历元间差分将垂直分量差掉了,说明垂直分量不可以估。在圆走航模式的历元间差分模型下,观测采样数一旦确定,则
在单位权方差因子一定情况下,位置精度衰减因子PDOP越小,表明点位精度越高。圆走航模式下非差观测的a、b、c间的关系[15, 35]为
 (27)
(27)
可构造如下拉格朗日函数
 (28)
(28)
求偏导,并令
 (29)
(29)
将式(29)代入式(27),解得
 (30)
(30)
设r是走航半径,则有
 (31)
(31)
则圆走航模式最佳测量走航半径为
 (32)
(32)
式(32)说明,圆走航模式最佳测量半径为
 (33)
(33)
式中,σ0为水声测距精度。
如果仅考虑平面位置精度最高,即要求[14]
 (34)
(34)
采样率一定情况下,要使HDOP2最小,即要求sin2γ取值最大,则有
 (35)
(35)
由于水深u是一固定值,即要求最佳走航半径为
 (36)
(36)
平面位置理论精度为
 (37)
(37)
要使垂直分量精度最高,即σu2要小,则要求
 (38)
(38)
即要求最佳走航半径为
 (39)
(39)
式(39)表明,要使垂直分量精度最高,应在水声应答器过顶方向进行重复观测,其理论精度为
 (40)
(40)
对比式(33)、式(37)、式(40),在没有系统误差影响情况下,估计的三维位置、平面位置、垂直参数的理论精度与水声测距观测数的平方根成反比,与水声测距精度成正比。要使垂直分量精度最高,则应在水下应答器过顶位置进行长期观测;要使平面位置精度最高,则应以水下应答器为中心、半径为水深的圆轨迹进行测量;要确保三维位置精度最高,则应以水深的
从前文推导可以看出,不同的测量半径对定位误差各分量的影响存在明显差异,实际测量时,航迹设计为半径等于水深的圆形航迹加过顶十字交叉航迹。这种测量轨迹的组合既满足了水平方向精度最佳,也满足了深度分量精度的要求,不仅有利于测量轨迹控制,也有利于提高测量效率。
2.3 圆走航模式下测距系统误差的影响在式(6)中,通常将综合性误差δρ纳入随机误差考虑。事实上,综合性误差δρ是系统性误差,并不完全具备随机误差[4, 6]。由式(10)可知,综合性误差对海底大地基准点坐标影响为
 (41)
(41)
式中,
圆走航观测可认为是等权观测,由式(19)、式(21)、式(41)得测距综合性误差对定位结果的影响为
 (42)
(42)
顾及圆走航下各历元的声线路径基本一致,观测距离近似相等,可认为测距误差是近似常数δρv0,同时有
 (43)
(43)
即圆走航下测距系统误差是近似常数δρv0,对定位结果的影响为
 (44)
(44)
可以看出,测距系统误差对水平方向坐标的影响几乎为0,而对垂直分量的影响较大,垂直分量的误差取决于开角γ和测距误差δρv0的大小。开角γ越大,测距误差δρv0也越大,对垂直分量影响越大;开角γ越小,测距误差δρv0也越小,对垂直分量影响也越小。
3 算例与分析本文分别用模拟仿真数据和深海实测数据进行分析。
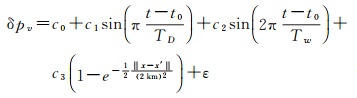
3.1 模拟算例分析水声测距误差通常采用式(45)[33]表示
 (45)
(45)
测距误差主要包括:第1项是常数误差,通常由声速未标定误差引起;第2项和第3项是声速变化引起的长周期项和短周期项误差,参照文献[4]在北太平洋的试验和文献[6]在夏威夷岛附近的试验,测距误差中的长周期项与潮汐变化规律近似,周期为12h,振幅约20cm,测距误差短周期项一般由内波引起,周期从几十分钟到几个小时不等,t0是初始时刻,t是任意时刻,其中TD是指长周期项,Tw是指短周期项;第4项是测区相关性误差,与距离变化有关,x是t时刻声学换能器的三维坐标,x′是海底应答器的三维坐标;第5项为随机性误差。
本文进行如下仿真试验,测量船以应答器的垂直投影为中心进行圆走航测量一周。水下应答器的深度为5000m,为使水平位置精度最高,圆走航模型的最佳走航半径应等于水深,即测量半径为5000m,每20s进行一次测距,共获得4320个水声测距观测数据。测距误差模拟采用式(45)计算,随机性误差为方差2cm的正态分布,其他参数配置见表 1。模拟中除考虑测距误差外,还考虑测量船定位误差,水平方向的定位精度为5cm,垂直方向定位精度为10cm。
| 参数 | c0/cm | c1/cm | c2/cm | c3/cm | Tw/min | TD/h |
| 取值 | 10 | 30 | 12 | 2 | 20 | 12 |
图 2给出了内波引起的短周期误差、日月潮测距误差、测区相关性误差以及总的误差大小;由于考虑内波误差和不考虑内波误差对非差定位模型设计矩阵系数的值影响非常小,对差分定位模型设计矩阵系数的值影响也小,图 3仅给出考虑内波误差较小情形下的非差、差分模型在N、E、U方向的设计矩阵系数,表 2给出了非差定位模型和差分模型确定的N、N-1;图 4给出了考虑内波误差和不考虑内波误差情形下的非差和差分定位模型确定的残差,表 3给出了不同方案计算的残差统计;表 4给出了测距误差考虑内波误差的非差和差分计算模型的结果精度统计,测距误差不考虑内波误差的非差和差分计算模型的结果精度统计也在表 4中。

|
| 图 2 测距误差大小 Fig. 2 Ranging errors |

|
| 图 3 设计矩阵 Fig. 3 Design matrix |
| 定位模型 | N | N-1 |
| 非差 | 1080.00 0.000001080.00 0.000000.000002160.00 |
0.00093 0.000000.00093 0.000000.000000.00046 |
| 单差 | 0.00457 0.000000.00457 |
218.85 0.0000218.95 |

|
| 图 4 非差和差分模型计算的残差 Fig. 4 Residuals calculated by the undifference and difference models |
| 测距误差 | 定位模型 | min | max | RMS |
| 考虑内波误差 | 非差 | -0.124 | 0.123 | 0.085 |
| 单差 | -0.013 | 0.013 | 0.009 | |
| 不考虑内波 | 非差 | -0.004 | 0.004 | 0.002 |
| 单差 | -0.001 | 0.001 | 0.0003 |
| 测距误差 | 定位模型 | m0 | mE | mN | mU |
| 考虑内波误差 | 非差 | 0.085 | 0.003 | 0.003 | 0.002 |
| 单差 | 0.013 | 0.132 | 0.132 | — | |
| 不考虑内波 | 非差 | 0.002 | 0.003 | 0.003 | 0.002 |
| 单差 | 0.0004 | 0.005 | 0.005 | — |
可以看出:
(1) 从观测几何结构看,非差定位模型设计矩阵N、E方向元素值呈正弦变化,振幅达到约0.7,而U方向元素的值几乎为一常值约0.67,计算得到的法方程阵N的主对角线元素的值较大,达到1080、1080与2160,其协因数阵N-1的主对角线元素的值非常小,仅0.00093、0.00093和0.00046,这说明其观测几何结构较好,对参数的求解非常有利;历元间单差模型下设计矩阵N、E方向元素的值也呈正弦变化,但振幅非常小,仅达到0.001,而U方向元素的值接近零,计算得到的法方程阵N的主对角线元素的值相对较小,仅为0.0045、0.0045,其协因数阵N-1的主对角线元素非常大,达到218.85、218.95,这说明历元间差分后观测几何结构变差了,参数的求解易受观测异常的干扰。
(2) 从计算残差看,测距误差考虑内波的定位模型计算的残差大于测距误差不考虑内波的定位模型。测距误差考虑内波时,非差模式计算得到的残差最大达到0.12m,其单位权中误差为0.085m,而差分模式下计算得到的残差最大约0.013m,单位权中误差仅为0.009m;测距误差不考虑内波时,非差模式计算的单位权中误差为0.002m,而差分模式的单位权中误差仅为0.0003m。这说明差分模式计算得到的残差较非差模式要小得多,主要是因为差分将绝大部分测距误差消除掉了,即差分消除了常数误差和声速变化引起的长周期项,短周期项误差大部分也被消除,仅保留了残余测距误差。
(3) 从定位参数精度看,差分模式将绝大部分测距误差消除掉了,残余测距误差较小,估计的位置结果精度应该高,但计算结果发现,差分模型定位结果的精度比非差模型精度低一个数量级。测距误差考虑内波时,非差模式下平面位置各分量精度为0.003m、0.003m,而差分模式下位置精度为0.132m、0.132m;测距误差不考虑内波时差分模式下位置精度为0.005m、0.005m。这主要是因为差分后设计矩阵结构变差了,使得差分模型的N-1对角线元素的值明显变大,观测误差的影响被放大了。
(4) 试验中也进行了圆走航半径为1.5倍水深的模拟试验,由于篇幅所限没有给出详细的图表,但与圆走航半径等于水深的结论分析相同,只是各类数值不一样。同样,也进行了基准点顶部观测的数据模拟,基准点水深估计值受各类误差累计影响,测距误差越大,对垂直分量影响就越大。
3.2 实测算例分析为检验分析,采用一次深海试验数据进行分析。试验水域水深约3000m,水下地形平坦,在海底布设1个水声应答器作为水下大地基准点,测量船以应答器为圆心、半径约为水深进行圆走航方式测量一周,但由于测量船控制等原因,实际测量并不是标准圆(图 5)。测量时船速约4n mile/h,测量耗时约1.5h,每8s进行一次水声测距,共获得683个水声测距时延数据。利用GNSS星基差分接收机,测量获得测量船GNSS天线的位置,采样率为1Hz;同时,利用姿态测量设备获得测量船姿态,采样率为5Hz。测量前,严格测定船载水声换能器、GNSS天线、姿态设备在船体坐标系下的坐标。如此,利用测得的载体GNSS天线位置、姿态数据和标定的GNSS天线到换能器偏差数据,通过姿态转换非常容易得到声学换能器的位置。此外,测量期间还进行了声速剖面测量,以获得水声声速剖面(图 6),利用测得的声速剖面数据采用声线跟踪算法以计算换能器到水下大地基准点之间的距离。

|
| 图 5 测量航迹图 Fig. 5 Survey ship track |

|
| 图 6 测量声速剖面 Fig. 6 Sound velocity profile |
表 5给出了非差定位模型和差分模型确定的N、N-1;表 6给出了非差和差分定位模型的定位结果;表 7给出了不同定位模型下的残差统计;图 7给出了设计矩阵系数;图 8给出了计算残差。
| 定位模型 | N | N-1 | ||||
| 非差 | 67.87263 | 0.01485 | ||||
| 5.28274 | 68.41396 | -0.00108 | 0.01485 | |||
| 10.21213 | 19.61352 | 547.71209 | -0.00024 | -0.00051 | 0.00185 | |
| 单差 | 0.01174 | 87.79303 | ||||
| 0.00078 | 0.01367 | -7.95065 | 77.55729 | |||
| 0.00020 | -0.00033 | 0.00016 | -123.4769 | 164.30120 | 6553.2772 | |
| 定位模型 | m0 | mE | mN | mU |
| 非差 | 0.210 | 0.026 | 0.026 | 0.009 |
| 单差 | 0.280 | 2.626 | 2.468 | 22.684 |
| 定位模型 | min | max | RMS |
| 非差 | -0.748 | 0.731 | 0.210 |
| 单差 | -0.856 | 0.834 | 0.198 |

|
| 图 7 设计矩阵 Fig. 7 Design matrix |

|
| 图 8 非差和差分定位模型计算的残差 Fig. 8 Residuals calculated by the undifference and difference positioning model |
(1) 从图 6可以看出,声速剖面在100m内的浅层变化较大,100m以深呈明显的抛物面变化。在100m处声速约1548m/s,1000m处约1485m/s,3000m处约1510m/s,即1000m以浅声速变化呈负梯度变化,而1000m以深声速变化呈正梯度变化。
(2) 从图 7可以看出,非差模型计算的设计矩阵N、E方向元素值基本呈正弦分布,振幅达到约0.5,而U方向元素有轻微变化,但基本为一条直线,其值约为0.9;差分模型的设计矩阵N、E方向元素也具有正弦趋势特性,振幅较小仅有0.005,U方向元素也基本为一条直线,但有轻微浮动。设计矩阵系数直接反映了观测几何强度,即非差观测模型的观测几何强度明显优于差分观测模型。
(3) 对比实测数据的图 7和仿真数据的图 4,它们计算的设计矩阵的变化趋势基本一致,但在数值上有明显差异。实测数据差分模型的设计矩阵元素具有明显的抖动,而仿真数据确定的设计矩阵元素数值较小,但图形非常平滑。这主要是由于测量船控制原因,其测量航迹为近似圆,而模拟数据的测量轨迹为标准圆。
(4) 对比表 5中不同定位模型的法矩阵N,非差定位模型的法矩阵N的主对角元素较大,在E、N、U方向的数值分别达到67.8、68.4、547.7,其协因素矩阵N-1的主对角线元素的值较小,仅为0.015、0.015和0.002;差分定位模型的法矩阵N的主对角元素的值非差小,仅为0.012、0.014和0.0002,而其协因素阵主对角线元素的值较大,达到87.79、77.5和6553.2。这也说明,非差观测模型的观测几何强度明显优于差分观测模型。
(5) 从结果看,非差定位模型、差分定位模型的单位权中误差为0.21m、0.28m,其差异并不大,差分模型虽然削弱了系统误差的影响,但随机误差却增大了;非差定位模型点位坐标的内符精度为0.026m、0.026m和0.009m,差分定位模型的内符精度却达到2.6m、2.6m和22.68m,这说明非差观测模型的定位结果精度优于差分观测模型结果。
(6) 从图 8可以看出,无论非差定位模型还是差分定位模型,其残差均存在一定周期现象,可能与海洋内波等系统误差的影响有关。非差定位模型的残差的最小值、最大值和RMS分别为-0.748m、0.731m和0.210m,差分定位模型分别为-0.856m、0.834m和0.198m,这两种模型的残差的统计差异并不大。这点与仿真数据的结论明显不同,这说明实测数据的影响因素较模拟数据所考虑的因素要复杂得多。
4 结束语本文对圆走航模式下水下基准点的定位效能进行了系统分析。分析了声速剖面变化等系统误差对定位结果的影响,详细讨论了声学测距非差定位模型和削弱系统误差影响的历元间差分定位模型,并对圆走航模式下非差、差分对位置参数的可测性、不同分量位置精度的最佳测量半径、测距误差的影响等进行了系统分析,给出了其适用性条件,利用仿真和深海实测数据进行了详细验证。
(1) 从参数可估计性看,非差定位模型对三维位置参数均可估,如要同时估计位置参数和系统误差参数,垂直分量与系统误差参数往往不可分;历元差分定位模型消除了大部分系统误差,仅能够估计平面位置参数,而垂直分量参数不可估。在非标准圆观测模式下,非差、差分模型均可估计三维位置参数,但历元差分定位模型估计的垂直分量参数的精度一般会较低。
(2) 为确保位置参数不同分量的精度,圆走航测量轨迹有不同的最佳测量半径。同时确保三维位置精度的最佳测量半径约为水深的2倍,仅保证平面位置精度的最佳测量半径为水深的1倍,而仅确保测量深度的精度则应在水下基准点正上方进行连续测量。位置参数的理论精度与水声测距观测测量数的平方根成反比,与水声测距精度成正比。为确保海底大地基准点位置精度和提高测量效率,建议采用1倍水深圆走航辅以过顶测量相结合的方式。
(3) 圆走航模式下测距系统误差对位置水平分量的影响较小,几乎为零,而对垂直分量有影响与测量开角(即测量半径)大小有关,与测距误差的大小成正比,开角越大,测距误差也越大,对垂直分量影响越大;开角越小,测距误差也越小,对垂直分量影响也越小。为削弱测距系统误差的影响,测量模式采用对称观测,提高垂直分量精度,建议采用多次过顶观测并辅以多源手段消除单一手段的系统误差。
| [1] |
杨元喜, 徐天河, 薛树强. 我国海洋大地测量基准与海洋导航技术研究进展与展望[J]. 测绘学报, 2017, 46(1): 1-8. YANG Yuanxi, XU Tianhe, XUE Shuqiang. Progresses and prospects in developing marine geodetic datum and marine navigation of China[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(1): 1-8. DOI:10.11947/j.AGCS.2017.20160519 |
| [2] |
杨元喜, 刘焱雄, 孙大军, 等. 海底大地基准网建设及其关键技术[J]. 中国科学: 地球科学, 2020, 63(7): 936-945. YANG Yuanxi, LIU Yanxiong, SUN Dajun, et al. Seafloor geodetic network establishment and key technologies[J]. Science China Earth Sciences, 2020, 63(8): 1188-1198. |
| [3] |
刘经南, 陈冠旭, 赵建虎, 等. 海洋时空基准网的进展与趋势[J]. 武汉大学学报(信息科学版), 2019, 44(1): 17-37. LIU Jingnan, CHEN Guanxu, ZHAO Jianhu, et al. Development and trends of marine space-time frame network[J]. Geomatics and Information Science of Wuhan University, 2019, 44(1): 17-37. |
| [4] |
SPIESS F N, CHADWELL C D, HILDEBRAND J A, et al. Precise GPS/acoustic positioning of seafloor reference points for tectonic studies[J]. Physics of the Earth and Planetary Interiors, 1998, 108(2): 101-112. DOI:10.1016/S0031-9201(98)00089-2 |
| [5] |
MOCHIZUKI M, SATO M, YOSHIDA Z, et al. Seafloor geodetic observations around Japan[C]//Proceedings of 2002 International Symposium on Underwater Technology. Tokyo, Japan: IEEE, 2002: 239-243.
|
| [6] |
OSADA Y, FUJIMOTO H, MIURA S, et al. Estimation and correction for the effect of sound velocity variation on GPS/acoustic seafloor positioning: an experiment off Hawaii Island[J]. Earth, Planets and Space, 2003, 55(10): e17-e20. DOI:10.1186/BF03352464 |
| [7] |
FUJITA M, ISHIKAWA T, MOCHIZUKI M, et al. GPS/acoustic seafloor geodetic observation: method of data analysis and its application[J]. Earth, Planets and Space, 2006, 58(3): 265-275. DOI:10.1186/BF03351923 |
| [8] |
SATO M, FUJITA M, MATSUMOTO Y, et al. Improvement of GPS/acoustic seafloor positioning precision through controlling the ship's track line[J]. Journal of Geodesy, 2013, 87(9): 825-842. DOI:10.1007/s00190-013-0649-9 |
| [9] |
FAVALI P, BERANZOLI L. Seafloor observatory science: a review[J]. Annals of Geophysics, 2006, 49(2-3): 515-567. |
| [10] |
MATSUMOTO Y, ISHIKAWA T, FUJITA M, et al. Weak interplate coupling beneath the subduction zone off Fukushima, NE Japan, inferred from GPS/acoustic seafloor geodetic observation[J]. Earth, Planets and Space, 2008, 60(6): e9-e12. DOI:10.1186/BF03353114 |
| [11] |
陈俊勇, 杨元喜, 王敏, 等. 2000国家大地控制网的构建和它的技术进步[J]. 测绘学报, 2007, 36(1): 1-8. CHEN Junyong, YANG Yuanxi, WANG Min, et al. Establishment of 2000 national geodetic control network of China and it's technological progress[J]. Acta Geodaetica et Cartographica Sinica, 2007, 36(1): 1-8. DOI:10.3321/j.issn:1001-1595.2007.01.001 |
| [12] |
杨元喜. 2000中国大地坐标系[J]. 科学通报, 2009, 54(16): 2271-2276. YANG Yuanxi. Chinese geodetic coordinate system 2000[J]. Chinese Science Bulletin, 2009, 54(16): 2271-2276. |
| [13] |
魏子卿, 刘光明, 吴富梅. 2000中国大地坐标系: 中国大陆速度场[J]. 测绘学报, 2011, 40(4): 403-410. WEI Ziqing, LIU Guangming, WU Fumei. China geodetic coordinate system 2000: velocity field in mainland China[J]. Acta Geodaetica et Cartographica Sinica, 2011, 40(4): 403-410. |
| [14] |
吴永亭. LBL精密定位理论方法研究及软件系统研制[D]. 武汉: 武汉大学, 2013. WU Yongting. Study on theory and method of precise LBL positioning and development of positioning software system[D]. Wuhan: Wuhan University, 2013. |
| [15] |
孙文舟. 海底大地控制网坐标测定及关键参数确定方法的研究[D]. 大连: 大连舰艇学院, 2019. SUN Wenzhou. Study on coordinate determination and key parameters determination of seafloor geodetic control network[D]. Dalian: Dalian Naval Academy, 2019. |
| [16] |
FUJIMOTO H, KANAZAWA T, MURAKAMI H. Seafloor acoustic ranging and the effect of temperature variation[M]//Gravity, Geoid and Marine Geodesy. Tokyo, Japan: Springer, 1997: 690-695.
|
| [17] |
张钰玺, 张小红, 刘全海, 等. 航空测量场景下的中长基线动态定位方法[J]. 测绘学报, 2019, 48(7): 871-878. ZHANG Yuxi, ZHANG Xiaohong, LIU Quanhai, et al. A method of dynamic positioning with the medium and long baseline for aerial measurement scenarios[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(7): 871-878. DOI:10.11947/j.AGCS.2019.20180513 |
| [18] |
CHEN Guanxu, LIU Yang, LIU Yanxiong, et al. Adjustment of transceiver lever arm offset and sound speed bias for GNSS-acoustic positioning[J]. Remote Sensing, 2019, 11(13): 1606-1617. DOI:10.3390/rs11131606 |
| [19] |
赵爽, 王振杰, 刘慧敏. 顾及声线入射角的水下定位随机模型[J]. 测绘学报, 2018, 47(9): 1280-1289. ZHAO Shuang, WANG Zhenjie, LIU Huimin. Investigation on underwater positioning stochastic model based on sound ray incidence angle[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(9): 1280-1289. DOI:10.11947/j.AGCS.2018.20170026 |
| [20] |
赵建虎, 梁文彪. 海底控制网测量和解算中的几个关键问题[J]. 测绘学报, 2019, 48(9): 1197-1202. ZHAO Jianhu, LIANG Wenbiao. Some key points of submarine control network measurement and calculation[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(9): 1197-1202. DOI:10.11947/j.AGCS.2019.20190157 |
| [21] |
易昌华, 任文静, 王钗. 二次水声定位系统误差分析[J]. 石油地球物理勘探, 2009, 44(2): 136-139. YI Changhua, REN Wenjing, WANG Chai. Analysis on error of secondary acoustic positioning system[J]. Oil Geophysical Prospecting, 2009, 44(2): 136-139. DOI:10.3321/j.issn:1000-7210.2009.02.003 |
| [22] |
GENG X. Precise acoustic bathymetry[D]. Victoria, BC: University of Victoria, 1997.
|
| [23] |
TAKAHASHI N, FUTA K, TSUCHIYA T, et al. Calculation of eigenray with equi-sound-speed division of sound speed profile[J]. Acoustical Science and Technology, 2000, 21(3): 153-161. |
| [24] |
孙万卿. 浅海水声定位技术及应用研究[D]. 青岛: 中国海洋大学, 2007. SUN Wanqing. Studies on underwater acoustic localization technique in shallow water and its application[D]. Qingdao: Ocean University of China, 2007. |
| [25] |
SAKIC P, BALLU V, CRAWFORD W C, et al. Acoustic ray tracing comparisons in the context of geodetic precise off-shore positioning experiments[J]. Marine Geodesy, 2018, 41(4): 315-330. DOI:10.1080/01490419.2018.1438322 |
| [26] |
WANG Junting, XU Tianhe, NIE Wenfeng, et al. The construction of sound speed field based on back propagation neural network in the global ocean[J]. Marine Geodesy, 2020, 43(6): 621-642. DOI:10.1080/01490419.2020.1815912 |
| [27] |
李圣雪, 王振杰, 聂志喜, 等. 一种适用于深海长基线定位的自适应分层声线跟踪法[J]. 海洋通报, 2015, 34(5): 491-498. LI Shengxue, WANG Zhenjie, NIE Zhixi, et al. A self-adapting division ray-tracing method in the long baseline acoustic positioning[J]. Marine Science Bulletin, 2015, 34(5): 491-498. |
| [28] |
张志伟, 暴景阳, 金山. 一种多波束测深声线跟踪自适应分层方法[J]. 海洋测绘, 2018, 31(1): 23-26, 42. ZHANG Zhiwei, BAO Jingyang, JIN Shan. A self-adapting division method for ray-tracing of multibeam echosounding[J]. Hydrographic Surveying and Charting, 2018, 31(1): 23-26, 42. DOI:10.3969/j.issn.1671-3044.2018.01.006 |
| [29] |
CHEN H H, WANG C C. Optimal localization of a seafloor transponder in shallow water using acoustic ranging and GPS observations[J]. Ocean Engineering, 2007, 34(17-18): 2385-2399. DOI:10.1016/j.oceaneng.2007.05.005 |
| [30] |
YANG Fanlin, LU Xiushan, LI Jiabiao, et al. Precise positioning of underwater static objects without sound speed profile[J]. Marine Geodesy, 2011, 34(2): 138-151. DOI:10.1080/01490419.2010.518501 |
| [31] |
孙文舟, 殷晓冬, 暴景阳, 等. 海底控制点定位的半参数平差模型法[J]. 测绘学报, 2019, 48(1): 117-123. SUN Wenzhou, YIN Xiaodong, BAO Jingyang, et al. Semi-parametric adjustment model methods for positioning of seafloor control point[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(1): 117-123. DOI:10.11947/j.AGCS.2019.20180187 |
| [32] |
赵建虎, 刘经南. 多波束测深及图像数据处理[M]. 武汉: 武汉大学出版社, 2008. ZHAO Jianhu, LIU Jingnan. Multibeam sounding and image data processing[M]. Wuhan: Wuhan University Press, 2008. |
| [33] |
XU Peiliang, ANDO M, TADOKORO K. Precise, three-dimensional seafloor geodetic deformation measurements using difference techniques[J]. Earth, Planets and Space, 2005, 57(9): 795-808. DOI:10.1186/BF03351859 |
| [34] |
BVRGMANN R, CHADWELL D. Seafloor geodesy[J]. Annual Review of Earth and Planetary Sciences, 2014, 42(1): 509-534. DOI:10.1146/annurev-earth-060313-054953 |
| [35] |
ZHAO Jianhu, ZOU Yajing, ZHANG Hongmei, et al. A new method for absolute datum transfer in seafloor control network measurement[J]. Journal of Marine Science and Technology, 2016, 21(2): 216-226. DOI:10.1007/s00773-015-0344-z |
| [36] |
赵建虎, 陈鑫华, 吴永亭, 等. 顾及波浪影响和深度约束的水下控制网点绝对坐标的精确确定[J]. 测绘学报, 2018, 47(3): 413-421. ZHAO Jianhu, CHEN Xinhua, WU Yongting, et al. Determination of absolute coordinate of underwater control point taking waves and depth's constraint into account[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(3): 413-421. DOI:10.11947/j.AGCS.2018.20170246 |
| [37] |
孙文舟, 殷晓冬, 曾安敏, 等. 附加深度差和水平距离约束的深海控制点差分定位算法[J]. 测绘学报, 2019, 48(9): 1190-1196. SUN Wenzhou, YIN Xiaodong, ZENG Anmin, et al. Differential positioning algorithm for deep-sea control points on constraint of depth difference and horizontal distance constraint[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(9): 1190-1196. DOI:10.11947/j.AGCS.2019.20180514 |
| [38] |
OBANA K, KATAO H, ANDO M. Seafloor positioning system with GPS-acoustic link for crustal dynamics observation—a preliminary result from experiments in the sea[J]. Earth, Planets and Space, 2000, 52(6): 415-423. DOI:10.1186/BF03352253 |
| [39] |
YAMADA T, ANDO M, TADOKORO K, et al. Error evaluation in acoustic positioning of a single transponder for seafloor crustal deformation measurements[J]. Earth, Planets and Space, 2002, 54(9): 871-881. DOI:10.1186/BF03352435 |
| [40] |
KUSSAT N H, CHADWELL C D, ZIMMERMAN R. Absolute positioning of an autonomous underwater vehicle using GPS and acoustic measurements[J]. IEEE Journal of Oceanic Engineering, 2005, 30(1): 153-164. DOI:10.1109/JOE.2004.835249 |
| [41] |
BOYD S, EL GHAOUI L, FERON E, et al. Linear matrix inequalities in system and control theory[M]. Philadelphia: Society for Industrial and Applied Mathematics, 1994.
|
