



随着城市化的发展,大型建筑场馆、自动化工厂及地下空间等区域对室内定位技术的需求日益增长。全球卫星导航系统基本满足室外大部分区域的导航定位需求,但在室内却难以接收卫星信号,无法工作。因此,基于Wi-Fi、蓝牙、超宽带、伪卫星、射频等基站式的无线定位技术应运而生[1]。但由于室内结构多样、电磁环境复杂,基站式的无线定位方案需要平衡定位精度和运行成本,规模化应用存在困难。其他室内定位技术方法,如地磁指纹、运动捕捉、声波测距[2]等的研究应用也取得了成果。众多室内定位技术在定位精度指标、系统成本、工程化部署的便捷性方面各有优缺点。随着照明系统的升级,LED光源的广泛应用为可见光通信定位(visible light positioning, VLP)技术在室内定位领域的研究与应用提供了有利条件。VLP技术利用室内广泛存在的LED光源作为定位信标,兼顾通信定位和照明,具有系统部署简单、无电磁干扰、定位精度较高、成本较低的优点,在室内定位领域展现出良好的应用前景[3],成为近年来国内外相关高校和企业机构研究应用的热点。国内外高校如复旦大学、清华大学、信息工程大学、暨南大学、华南理工大学、香港中文大学、美国马里兰大学、英国牛津大学、德国海英里希赫兹研究所等科研机构在高速可见光通信研究的基础上进行了VLP技术研究;国际大型企业如高通、飞利浦、松下、谷歌、华为、中兴等纷纷布局VLP系统专利。2017年,飞利浦将研制的可见光通信室内导航定位系统用于大型商场购物导航。2020年,国家标准化管理委员会发布了由中国电子技术标准化研究院、深圳市海思半导体有限公司、清华大学、信息工程大学、北京大学、北京全电智领科技有限公司、东莞信大融合创新研究院、东莞芝捷智能科技有限公司起草的信息技术可见光通信系统室内定位传输协议标准(GB/T 36628.4—2019),标志着国内可见光通信定位应用产业化进入实施阶段。
可见光通信(visible light communication, VLC)是一种新型通信技术,主要利用LED快速的亮灭响应特性调制发送信息,接收端通过光敏二极管(photodiode,PD)等器件接收光信号。随着VLC技术的发展,单个光源的VLC通信速率已经达到Gbit/s量级[4],成为6G通信的重点研究技术之一。VLP技术是低速VLC技术的一种应用,按照定位终端接收VLC信号所用传感器类型的不同,可分为成像法和非成像法[5]。非成像法简称PD法,主要利用PD接收解析可见光信号和光强信息(received signal strength, RSS),并根据RSS进行测距交会[6-11]或指纹匹配[12-13],实现对PD终端的位置估计,定位精度可达亚米级甚至厘米级。文献[14—15]分别研究了基于VLC的到达时间法(time of arrival, TOA)和到达时间差法(time difference of arrival, TDOA)的VLP系统。其中基于TDOA的方法在5 m× 5 m×3 m环境中的仿真精度达3.6 cm。文献[16]使用环形PD阵列构建了基于角度到达(angle of arrival, AOA)的VLP方法,并提出一种加权的角度感知计算方法。文献[17]提出了基于多LED元件AOA的VLP系统,采用卡尔曼滤波器实现了对接收装置的连续定位。文献[18—20]研究了多种方法组合的VLP方法,提高了系统的抗干扰性和定位精度。基于PD的VLP方法通信速率高,定位速度快;但对光源系统的控制要求较高,系统设计较为复杂,可移植性较差,定位精度受环境影响较大。针对这些问题,文献[21—24]进行了定位算法优化研究,文献[24]采用自适应滤波的方法抵抗环境光干扰,提高定位精度,为基于PD的VLP系统的推广应用提供了一种方案。
基于成像的VLP法简称图像(image sensor,IS)法,主要利用CMOS传感器对VLP光源成像,利用CMOS传感器的卷帘快门效应获取VLP光源的条纹图像,并通过条纹图像获取光源ID对应的坐标信息[25-27];然后通过摄影测量原理计算摄影点相对VLC光源的空间坐标,从而实现定位[28-31]。IS法通信传输容量小,但定位精度较高,可移植性强。随着CMOS成像传感器在智能终端的广泛应用,基于智能手机和视觉移动机器人的IS法取得了较多的应用成果[32-34]。文献[31]将PD和IS两种方法相结合,利用双目视觉实现了基于单个圆形VLC光源的厘米级定位。文献[33]提出了一种基于智能手机的可见光通信与改进的行人航迹推算融合的室内定位方法,在3 m×3 m×3 m小空间、单光源条件下实现了厘米级定位精度。文献[34—35]研究了VLP系统在地下停车场的定位应用。VLP技术的发展使其在煤矿、隧道、电厂、超市等场景也取得了良好的应用效果[7, 33-38]。
当前,多数VLP系统主要注重基于圆形LED光源的定位问题,随着矩形平板光源的广泛应用,相关研究已经逐渐展开[29]。矩形平板光源普遍尺寸较大,具有显著的视觉信息,更适合作为VLP系统的定位参考。本文首先介绍VLP_PD和VLP_IS两种定位方法的基本原理和关键技术,并结合应用研究现状分析两种方法的优缺点;然后,介绍一种基于普通成像传感器和矩形平板光源的定位系统构建方法;最后,对VLP技术的研究应用发展方向作一些探讨。
1 非成像VLP方法非成像VLP方式主要通过PD接收解析可见光通信信号特征实现,定位速率高,计算量较小,定位终端容易集成,但需要对光源发送端进行同步信号调制,对光源分布有一定要求。其定位方法可分为信号ID识别法、光强RSS指纹分析法、光强RSS几何交会法、TOA法、AOA法等。
1.1 基于PD的LED_ID识别法基于PD的LED_ID识别法[39]也称为邻近法,如图 1所示。该方法将LED通信光源有限的照射范围作为定位区域,不断广播自身的ID信息,当定位装置中的PD接收识别到该ID信息时,即确定其位于该光源的定位区域内。该方法定位精度依赖光源密集程度,需要考虑光源布局,避免相邻光源重叠的干扰。基于PD的光通信接收能力较强,速率通常在几十Kbit/s以上,因此LED_ID可以附加一些其他信息,以满足位置服务的需要。

|
| 图 1 可见光通信LED_ID识别定位 Fig. 1 LED_ID identification and positioning based on visible light communication |
1.2 基于光接收强度RSS的测距交会法
基于强度调制和直接检测技术接收信号强度RSS以估算定位距离时,通常使用广义朗伯模型建立信号RSS与距离的关系[6-7],如图 2所示。

|
| 图 2 光强信号接收链路关系 Fig. 2 Reception link relationship of light intensity signal |
对于直射链路(line of sight,LOS)信道,VLC光源发射端与定位接收机PD端之间的信道直流增益见式(1)
 (1)
(1)
式中,AD表示接收机PD的有效感光接收面积;dL为LED和接收机之间的距离;θT和φR分别表示发射光源的辐射角和接收机PD的入射角;GF(φR)为链路中光滤波的增益;gC(φR)为链路中光集中增益,与探测器视场角ψFOV和器件使用的材料折射率nc有关。
由式(1)可知,建立RSS与VLC光源之间的距离关系并未考虑光反射的影响和其他噪声干扰,但在实际应用需要考虑这些因素。基于光强RSS的距离交会定位方法如图 3所示。通常使用4个VLC光源作为定位参考,定位终端在同一时刻接收4个光源的RSS信号转换为距离,并通过式(2)组成距离交会方程组,从而计算定位终端P的位置
 (2)
(2)

|
| 图 3 基于光强测距的空间定位 Fig. 3 Spatial positioning based on light intensity ranging |
1.3 基于光接收强度RSS的指纹定位
利用多个VLC光源在空间中形成的信号场作为定位参考,信号空间场中任意两点的信号存在差异形成特定指纹,这种将特定指纹与空间位置建立对应关系的定位方法称为指纹定位法[12]。基于RSS的指纹定位方法如图 4所示。

|
| 图 4 光强指纹定位原理 Fig. 4 The principle of fingerprint positioning based on light intensity |
4个ID不同的VLC光源成矩形分布,信号覆盖范围形成重叠区域,可以接收4个光源的ID信号并记录相应的光强RSS信号。光功率计算模型为
 (3)
(3)
式中,PT(i)表示第i个光源的发射光功率;PR←T(i)LOS为接收机接收到来自第i个光源的直射光功率;HR←T(i)LOS(0)表示接收机与第i个光源之间的LOS信道直流增益。因此,指纹位置可以表示为向量Pj=[PT(LED_ID1)j PT(LED_ID2)j PT(LED_ID3)j PT(LED_ID4)j],通过采集空间中特定位置的光功率RSS构建指纹空间数据模型,事先在定位空间中采集信号进行离线训练建立指纹匹配数据库,即可构建指纹匹配定位系统。
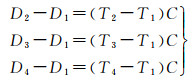
1.4 光信号时间到达方法光信号时间到达法分为TOA法和TDOA法。其中,TOA法首先测量信号在发射端和接收端之间传播时间,然后利用信号传播时间与信号传播速度相乘得到信号传播距离,从而确定收发终端之间的距离[14],最终通过测量接收端与多个发送端的距离进行距离交会定位。由于TOA通信载体为可见光,对收发两端的时间同步精度要求极高,否则难以达到测量精度要求。基于TDOA的VLP系统无须在接收端和发射端进行严格时间同步,但在发射端不同光源的信号调制需要严格同步[15]。如图 5所示,4个光源空间坐标已知,组成的TDOA系统的定位终端在一个周期内接收到4个VLC光源的延时信号{T1, T2, T3, T4}。设接收端的坐标为P(x0, y0, z0),系统各个光源距离定位终端的距离计算见式(4)
 (4)
(4)

|
| 图 5 到达时间测距交会定位 Fig. 5 Time-of-arrival ranging and rendezvous positioning |
根据到达时间差组成方程组关系见式(5)
 (5)
(5)
式中,C为光速信号角。
求解该方程组即可得到P点的三维坐标。
1.5 光信号角度到达方法光信号角度到达法的VLP系统有两种构成方式。一种方法是使用环形PD阵列[16],在接收到LED的信号时可以判断光源相对接收机定义的方位角和俯仰角,从而通过角度交会计算接收机相对光源的空间位置。图 6(a)为平面AOA原理。环状PD阵列传感器组成自身的坐标系,已知3个VLP光源的中心坐标构成定位系统,分别用A、B、C表示3个光源的中心,O点为接收机位置,当仅考虑平面坐标时,接收机与3个光源形成的平面角度分别为∠1、∠2、∠3,从而可以通过∠AOC、∠BOC计算O点的平面位置,即角度后方交会法。另一种方法是发射端使用阵列光源系统[17],如图 6(b)所示,阵列光源信号能测量出接收机相对光源的方位角度,当接收机接收到多个光源的相对角度信号后,进行角度交会实现定位,其本质为角度前方交会法。

|
| 图 6 AOA定位原理 Fig. 6 The principle of AOA positioning |
2 非成像VLP系统关键技术研究与应用
非成像高精度VLP系统对光源信号调制发送的同步性要求较高,需要考虑光源布局优化、去除背景光干扰、具体应用等因素进行信号调制,其关键技术主要包括光源信号调制、定位算法优化、多传感器融合、方法融合等。
2.1 光源信号调制方式高精度非成像VLP系统中的PD需要接收多个VLC光源的信号,如果多个光源发送定位信息在时域和频域上存在重叠,会造成互相干扰,无法构成通信定位系统。因此,基于多个光源的非成像VLP系统需要统一光源编码调制[3],利用信道复用的方式完成信号传输。VLC信号复用分为时分复用、频分复用、波分复用及码分复用。其中,时分复用需要系统内的光源轮流发送信号,将造成一定的时间延时,当系统内光源数量增多时,延时更为明显,难以满足照明需要。波分复用VLC系统意味着要使用可见光不同的波段,需要RGB光源和特殊的感光PD。正交频分复用(orthogonal frequency division multiplexing,OFDM)技术具有抵抗多径干扰的特点,是一种常用的VLC调制方式。文献[8]利用非对称限幅光OFDM调制奇载波,将调制后的子载波进行成对编码,并在接收端使用RSS技术获取位置信息,提高了定位精度。文献[9]提供了一种基于高速VLC系统的定位方案,即利用离散多音(discrete multi tone, DMT)调制技术,在不影响通信效率的情况下通过功率衰减模型确定每个子载波信号RSS,从而实现距离估计,得到厘米级定位结果。文献[10]提出了基于CDMA调制的方法,即利用CDMA调制中扩频码的正交性,对每个VLP光源的ID定位信息进行特定的正交码直接扩频处理,然后在接收端经自适应滤波器分辨出各VLP光源的ID码和对应的信号强度。
2.2 定位算法优化针对VLP系统易受背景光和漫反射影响的问题,文献[6]提出了使用相关函数检测和小波分析降低信号噪声的方法。文献[24]针对散粒噪声和热噪声等干扰因素,采用自适应滤波和互相关检测等数字信号处理方法提高了系统定位精度,将系统定位误差控制在0.01 m以内,一定程度上克服了环境光对定位结果的影响。针对指纹定位匹配效率的问题,文献[12]使用机器学习方法提高了指纹定位的效率。文献[21]采用粒子群优化重构信号,提高了指纹定位的稳健性。为了减少指纹库数量,基于光RSS指纹匹配的定位方法通常只考虑平面定位计算。针对基于光RSS测距三维定位的精度和计算效率问题,文献[11, 23]采用机器学习与智能算法,降低了环境对接收功率的影响,提高了定位精度和计算效率。
2.3 定位方法融合在基于PD的VLP方法中,相较于单一定位方法,混合信息定位方法能够提高定位精度和稳健性。文献[18]提供了一种基于混合TOA+RSS信息融合的定位方法,采用前置无迹卡尔曼滤波的粒子滤波算法将TOA信息与RSS信息进行融合,然后修正由于多路径效应产生的非线性误差,在5 m×5 m×3 m的测试条件下平均误差达2 cm。文献[19]提出了一种基于TDOA+AOA的混合定位算法,通过引入半定松弛因子(semi-definite relaxation,SDR)的方法寻找最优解,在10 m×10 m×3 m的仿真环境中平均定位误差为1.39 cm。文献[20]研究了基于混合AOA+ RSS的方法,根据RSS信息采用加权最小二乘法,从而提高AOA的定位精度。
2.4 多PD传感器终端定位方法文献[16]基于圆形PD阵列实现了基于AOA的VLP系统,系统的测角定位精度受PD数量的影响。文献[22]研究了基于多PD传感器的VLP定位方法,并应用在电网巡检工作环境中。如图 7(a)所示,将5个PD分布在四棱台表面组成接收机,通过探索接收功率和相对位置建立多PD接收定位的通用模型,在信道去噪后根据泰勒公式和隐函数存在定理提出线性迭代方法,在确保计算效率的情况下提高了定位结果精度。文献[25]针对移动机器人定位需求,提出了一种基于旋转云台的多PD定位系统。如图 7(b)所示,在云台旋转过程中,接收机可以感知到空间中定位光源的光强功率值并接收光源的定位信息,当接收到某个光源的光强最大时,认为此时PD正对该光源,进而记录此时相对该光源的方位角,基于AOA方法实现定位,在5 m空间距离内定位误差小于15 cm。多PD定位方案在一定程度上克服了基于单个PD的接收角度限制,具有较好的场景适用性。

|
| 图 7 多PD接收机 Fig. 7 Multi-PD receiver |
2.5 技术应用实践
LED_ID方法逻辑简单、实现方便、系统简洁,定位精度取决于光源的布设密度,是一种最先商用化的可见光定位方式之一,主要用于文博展馆定位导览,但定位精度低。基于时间到达方法的定位系统对时间同步要求较高,系统复杂度和成本较高,难以推广应用。基于角度达到的多PD传感器方案,定位适应性较强,但对光源定位信息发送端和接收端都具有较高要求,目前仍处于研究阶段。基于光RSS测距的方法对PD光功率测量的精度要求较高,且需要建立离线标定关系,定位系统容易受背景光干扰,可移植性较差,但适用特定封闭环境,如隧道环境下对地铁列车的定位[7]、电厂高压电线路巡检[22]、无人化超市定位导引[38]等场景。
3 基于成像的VLP方法基于IS的VLP方式包括光源成像识别和测量定位两个阶段。成像识别阶段主要利用成像传感器卷帘快门效应获取VLP光源成像的条纹图像,然后通过分析光源条纹特征获取光源ID;成像定位阶段根据定位所参考光源的数量分为单光定位和多光源定位两种方法。
3.1 基于IS的VLP光源识别定位方法成像法VLP系统一般使用CMOS成像传感器作为接收端,发送端将调制的LED_ID信息以亮灭闪烁的方式不断广播,CMOS成像传感器通过卷帘快门工作机制对VLP光源成像,卷帘快门从上到下按行依次曝光逐行感知VLP光源的明暗闪烁,得到灰度条纹图像。图 8(a)为不同形状光源的成像效果。成像识别阶段主要通过数字图像处理方法提取VLP光源的图像区域、几何特征点及明暗条纹信息(图 8(b)),然后对光源条纹进行解码,获取光源的LED_ID信息及其对应的光源坐标信息,为成像定位提供坐标参考。

|
| 图 8 VLP光源识别定位方法 Fig. 8 VLP light source identification and positioning method |
测量定位阶段根据摄影测量原理,利用相机内参数和VLP光源参考点坐标信息计算相机位姿实现定位。室内常用的LED光源主要分为小尺寸圆形灯和较大尺寸的矩形灯,布局方式多样。因此,根据VLP系统所用光源的形状、尺寸、数量及空间布局,分为单光源VLP方法和多光源VLP方法,同时根据VLP系统中所用的IS数量,分为单目VLP和双目VLP系统。基于单光源的VLP方法中,多数成像VLP系统的定位终端需要增加IMU姿态传感器辅助成像提高定位精度。
3.2 基于IS的多光源VLP方法基于多个光源成像的VLP系统如图 9(a)所示,一般使用4个以上尺寸较小的圆形光源,要求定位终端成像范围至少涵盖3个以上光源,满足空间后方交会成像位姿计算需要。定位终端相机对多个VLP光源成像后,定位计算流程如图 9(b)所示。首先,分别提取每个VLP光源区域图像,计算每个VLP光源图像的中心坐标,并解析明暗条纹信息,获取光源LED_ID及其对应的空间坐标;然后,根据成像几何关系计算相机位姿,得到定位结果,光源图像的中心像点一般取光斑轮廓几何中心或重心,LED_ID可以根据条纹图像解码或基于规则匹配的方法识别;最后,进行成像位姿计算,输出定位结果。

|
| 图 9 多光源成像定位原理及计算流程 Fig. 9 The principle and calculation process of multi-light source imaging positioning |
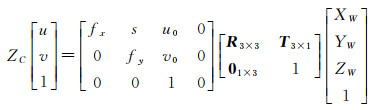
成像几何关系如下
 (6)
(6)
式中,ZC表示相机坐标中目标点到摄影中心的距离;[u v]T表示像点坐标;fx、fy、s、u0、v0为相机内参数;R3×3、T3×1为相机坐标系与世界坐标系的旋转和平移关系;[XW YW ZW]T为目标点世界坐标。
成像位姿估计可以根据参与计算的光源数量采用不同的解法。当光源数量为3时,可以使用单像空间后方交会、角锥体等方法计算;当光源数量大于3时,可以采用EPNP、四元数等方法进行计算[29]。基于成像的VLP系统的定位精度与成像距离、成像分辨率、光源分布等因素有关,位置估计误差一般处于厘米量级,方位旋转角估计误差可小于1°[40]。
3.3 单光源VLP_IS方法建筑走廊等室内区域光源分布距离较远,成像区域难以覆盖3个以上的VLP光源。当成像视野中仅有一个圆形VLP光源时,理论上只能提供一个定位参考,不能提供定向参考。针对单个小尺寸圆形VLP系统,文献[30]基于智能手机提供的方位角和倾斜角,结合CMOS传感器提出了一种AOA测量定位方法,文献[31]提出了一种基于双目视觉和IMU辅助的成像定位方法。如图 10(a)所示,将双目视觉传感器与IMU姿态传感器集成为成像定位模块,在双目视觉坐标系中测量模块圆点O到VLP光源中心P的空间距离L,同时记录此时IMU的空间姿态角,将OP转换为世界坐标系中的空间向量,从而得到O点的世界坐标,实现定位。当使用矩形光源作为定位参考时,可以直接利用矩形光源4个顶点实现成像定位,但需要在图像上能够确定矩形顶点的像点与其空间坐标的对应关系。文献[29]在光源上设置参考标记,解决光源4个像点与其世界坐标点的对应关系,实现基于矩形光源的成像定位,如图 10(b)所示。

|
| 图 10 单光源成像定位 Fig. 10 Visual positioning based on single light source |
4 成像VLP系统关键技术研究与应用
光源图像轮廓提取和ID识别是基于IS的VLP系统的关键性技术,不同性能的成像传感器获取的光源条纹清晰度存在较大差异。现有的成像法VLP技术多采用高性能成像传感器和圆形光源,基于普通成像传感器和矩形平板光源的VLP系统构建研究较少,限制了成像VLP方法的推广应用。针对这一问题,本节在总结成像VLP系统关键技术的基础上,介绍一种基于普通成像传感器和矩形平板光源的定位系统构建方法。
4.1 光源图像提取VLP光源轮廓计算和光源条纹提取是IS方法的首要步骤,主要使用数字图像方法获取光源区域,截取光源区域条纹信息。针对圆形VLP光源,文献[31]采用自适应二值化方法分离出圆形光斑区域,然后计算图像中光源区域轮廓,并计算轮廓圆度,设定圆度阈值滤除非光源区域。矩形VLP光源区域的提取与圆形光源的流程类似,提取光源轮廓后,需要根据轮廓点序列之间的角度关系确定矩形的顶点[29]。圆形光源的中心像点和矩形光源的顶点像点称为视觉关键点,这些关键点的图像提取精度直接影响成像定位精度。
4.2 基于成像的LED_ID识别 4.2.1 VLP光源条纹特点VLP光源成像条纹明暗间隔与LED_ID信号调制发送频率、成像传感器的帧率及分辨率等因素有关,与成像距离无关;但VLP光源图像条纹的数量与光源尺寸和成像距离有直接关系,在同等成像条件下光源尺寸越大,成像距离越近,光源图像条纹数量越多,能够发送的LED_ID容量越大。多数CMOS相机有一个门限延时,导致条纹图像在规律性移动,给解码带来一定困难。条纹图像的清晰度与CMOS的性能有较大关系,如图 11(a)所示,左边条纹为高性能CMOS对VLP光源的成像条纹,右边为普通CMOS成像传感器对同一VLP光源的成像效果。将条纹图像转化为灰度曲线,如图 11(b)所示。高性能CMOS条纹灰度曲线区分度较大,周期性明显,容易转化为高低信号进行解码;普通CMOS条纹曲线区分度较小,虽然具有明显的周期特征,但难以设置固定阈值进行二值化区分高低信号,难以满足解码需要。因此,根据条纹图像是否清晰可以将基于成像的LED_ID识别分为成像解码法和信号模板匹配法。

|
| 图 11 条纹图像与灰度曲线 Fig. 11 The fringe image and grayscale curve |
4.2.2 基于高性能CMOS的LED_ID识别方法
多数基于成像的VLP定位研究都使用较高性能的CMOS传感器。针对尺寸较小的圆形光源,文献[26]提出了一种基于频率调制的占空比法,通过控制光源调制频率得到间距不同的条纹图像,实现了对光源LED_ID的识别。该方法实现较简单,但为了兼顾照明需要,占空比法可用的LED_ID容量较小。文献[27]针对圆形小尺寸光源成像LED_ID容量小、识别率低的问题,提出了扩展LED_ID双频调制方法,能够得到C182种ID组合,具有较强的抗干扰能力。为进一步扩展成像法LED_ID容量,文献[28]使用RGB_LED光源引入颜色特征。当采用大尺寸矩形LED光源时,成像通信容量有一定提升,可参考ITF、ENA13等编码方式,使用更多规则的编码。目前基于大尺寸矩形VLP光源的成像识别研究较少。
4.2.3 基于普通CMOS光源LED_ID匹配方法针对普通CMOS传感器对VLP光源成像的条纹难以解码的问题,本文提出一种基于信号自相关序列的匹配方法。根据数字信号处理方法离散周期信号序列{x(n)}与其自相关序列{rxx(l)}周期相同,只要离散周期信号序列数量n大于其周期数,即可计算其自相关序列,且自相关序列计算结果基本不受n的影响。因此,将VLP光源条纹图像的灰度值序列(visible light positioning light source imaging fringe signal sequence,VLP_IFS)抽象为离散周期信号,分析其自相关序列特征,可以克服CMOS传感器门限延时对信号分析的影响。使用普通CMOS传感器,4个不同LED_ID光源成像条纹灰度序列的自相关序列波动情况如图 12所示。周期对应光源信号调制频率,波动特征代表不同的LED_ID数据,可以通过周期数和波动特征作为光源LED_ID匹配依据。因此,可以通过VLP光源CMOS成像灰度信号的自相关序列(visible light positioning light source imaging fringe signal autocorrelation sequence,VLP_IFSAS)建立VLP光源LED_ID匹配规则。

|
| 图 12 基于VLP_IFS的自相关序列分析 Fig. 12 Autocorrelation sequence analysis based on VLP_IFS |
通过计算VLP_IFSAS的周期推断出VLP_ IFS的周期后,理论上提取一个周期数量的VLP_ IFS序列作为模板是一种理想的方式,但稳定提取一个周期的VLP_IFS信号对CMOS成像传感器和软件算法的要求较高;而一个周期的VLP_IFSAS能够直接计算,对成像质量要求不高,且具有一定抗噪声干扰能力,能够解决成像质量较差无法满足直接解码的CMOS传感器的可见光通信光源识别问题。基于VLP_IFSAS的光源识别匹配流程如图 13所示。运用数字图像处理方法提取VLP光源图像区域,根据条纹图像区域逐行计算灰度平均值,得到VLP_IFS序列v(n)={v1, v2, …, vn}, v∈[0, 255];根据序列v(n)进行自相关计算,得到VLP_IFSAS rvv(l)={n1, n2, …, nT, …},并计算rvv(l)的周期数T;提取序列rvv(l)中前T个数值,并进行归一化处理,得到标准化序列X={x1, x2, …, xT}, x∈[0, 1];以{X, T}为LED_ID匹配模板,进行匹配计算得到对应LED_ID对应的光源空间信息。

|
| 图 13 基于VLP_IFSAS的光源匹配流程 Fig. 13 Light source matching process based on VLP_ IFSAS |
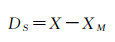
基于模板{X, T}信息,周期数T可作为模板匹配的初步条件,定义相同周期数的模板匹配度序列为
 (7)
(7)
式中,X为待匹配序列;XM为模板序列;DS={d1, d2, …, dT}, d∈(-1, 1)。显然,在建立光源模板时,采集多张光源图像平均化计算XM可提高模板的稳健性,若待匹配序列和模板光源一致,DS序列必然整体数值较小,反之会出现局部较大值。光源匹配判别可以视为SVM分类问题,使用多组光源数据相互计算DS序列,生成关于DS序列的正负样本进行SVM训练,匹配的DS序列视为正样本,非匹配的视为负样本,变换SVM核函数找到最佳的分类效果,进而实现基于VLP_IFSAS的光源匹配识别。
4.3 基于矩形平板VLP光源的成像识别与定位方法基于多光源成像的VLP方法需要考虑光源布局与成像姿态,工程化应用受到较大限制。基于单个光源的成像定位方法需要使用IMU辅助成像定位计算[29-33]或限定成像姿态[34-35]。多数成像VLP系统均使用圆形光源,文献[29]研究了基于矩形平板光源的成像定位方法,在此基础上本文提出一种基于平板VLP光源的成像识别与定位计算方法。如图 14所示,通过数字图像处理和基于VLP_IFSAS方法已经完成光源的LED_ID识别,并提取了矩形角点的像点坐标,如何确定矩形角点的像点坐标与其世界坐标的对应关系是一个关键问题。针对这一问题,本文提出一种基于IMU磁方位角对应关系的判别方法,流程如图 15所示。在确定矩形光源的角点世界坐标与其像点坐标的对应关系时,首先假定一种对应关系进行成像定位计算,得到定位模块的航向角,然后计算航向角H与IMU传感器的地磁偏转角M的差值,如果差值角度E小于一定阈值,则为正确关系,否则继续假定计算。矩形VLP光源4个角点的逆时针像点序列与其世界坐标逆时针序列的对应关系共有4种,因此最多计算4次即可确定对应关系。

|
| 图 14 矩形VLP光源视觉识别与顶点提取 Fig. 14 Visual recognition and vertex extraction of rectangular VLP light sources |

|
| 图 15 基于IMU辅助的矩形光源角点匹配流程 Fig. 15 The matching process of corner points of rectangular light sources with IMU assistance |
通常情况下,当参考点空间坐标与其像点坐标对应一致时,成像定位计算出来的航向角H与IMU提供的地磁方位角M相差不大,一般不超过10°,即E=|H-M| < 10。当磁方向传感器受到较强的磁场干扰时,会导致地磁方位角不准确。若地磁方位角误差大于45°,则基于磁方位角的判别方法将无法工作,出现系统判断错误的情况,因此偏差角度C的阈值设置为45°。
4.4 成像VLP系统应用在VLP_IS系统中,每个光源都是一个独立的发射单元,无须进行光源同步,不同光源信号叠加对定位结果没有影响,因此光源系统布设便捷、成本较低、易于工程化应用。智能手机等搭载CMOS成像传感器终端的广泛应用,为基于成像的VLP系统奠定了硬件基础。文献[33]基于成像解码方法获取了光源LED_ID确定定位区域,然后根据光照度模型及手机陀螺仪获得的方向角推算出具体位置信息,用于室内定位导航。文献[29, 31]研究了针对不同形状光源的高精度成像VLP方法,用于室内移动机器人定位导航。文献[33—34]将成像VLP系统用于地下停车导航,兼顾照明与位置服务。文献[36]利用井下防爆摄像仪采集LED矿灯的可见光通信条纹图像,通过成像解码确定矿灯编号对应人员信息,结合成像几何原理实现了矿井人员监控定位。
5 总结本文总结了基于PD和IS的VLP方法,系统分析了两种定位方法的关键技术与应用情况。两种方法在定位精度、对系统硬件的要求及可移植性方面的比较见表 1。
| VLP定位系统方法 | 定位精度/m | 光源调制要求 | 接收终端要求 | 可移植性 |
| LED_ID | 0.5~2 | 低 | 低 | 强 |
| RSS_测距法 | 0.03~0.3 | 较高 | 较高 | 中 |
| RSS_指纹法 | 0.03~0.3 | 较高 | 较高 | 弱 |
| 光信号时间到达法 | 0.04~0.3 | 高 | 高 | 中 |
| 光信号角度到达法 | 0.15~0.3 | 较高 | 较高 | 中 |
| 点状光源单目成像法 | 0.01~0.15 | 低 | 较低 | 强 |
| 点状光源双目成像法 | 0.02~0.15 | 低 | 较低 | 强 |
| 矩形平板单目成像法 | 0.03~0.15 | 低 | 较低 | 强 |
两种法均能达到厘米级定位精度,各有优点和不足。基于PD的VLP方法定位速率较高,计算量小,定位终端容易集成,但对光源发送端的信号调制要求较高,光源分布的密度对定位算法影响较大,适合专用场景部署,需要进一步研究抗环境光干扰的信号滤波方法,以提高定位系统的稳健性,基于多个PD与IMU传感器融合的定位方法是多传感器融合室内定位应用研究的方向之一。基于IS的VLP方法无须考虑光源之间的信号干扰问题,定位精度较高,但需要考虑光源布局并解决光源视觉跟踪识别等问题。基于IMU辅助的成像定位方法对光源布局要求不高,适合用于移动智能手机、移动机器人等终端的定位需求。受室内光源布局和成像视角的限制,基于成像的定位方案往往存在定位盲区,在移动定位中容易出现光源失锁情况,导致移动定位过程不够连续。针对这一问题,基于广角相机[41]的VLP光源成像识别与定位方法值得进一步研究。矩形平板光源具有尺寸大、视觉特征明显的特点,能够提供定位和定向参考,适合作为基于成像技术的VLP光源。光源视觉识别跟踪效率制约了成像定位的速率,VLP光源的快速视觉识别和跟踪是工程化应用研究的主要方向。光源作为空间位置固定的室内基础设施,可以作为全局定位参考。两种VLP定位方法相结合,以及视觉导航、惯性导航等系统相融合是室内多技术融合定位导航发展的主要方向之一。
| [1] |
邓中亮, 尹露, 唐诗浩, 等. 室内定位关键技术综述[J]. 导航定位与授时, 2018, 5(3): 14-23. DENG Zhongliang, YIN Lu, TANG Shihao, et al. A survey of key technology for indoor positioning[J]. Navigation Positioning and Timing, 2018, 5(3): 14-23. |
| [2] |
陈锐志, 郭光毅, 叶锋, 等. 智能手机音频信号与MEMS传感器的紧耦合室内定位方法[J]. 测绘学报, 2021, 50(2): 143-152. CHEN Ruizhi, GUO Guangyi, YE Feng, et al. Tightly-coupled integration of acoustic signal and MEMS sensors on smartphones for indoor positioning[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(2): 143-152. DOI:10.11947/j.AGCS.20200551 |
| [3] |
吴楠, 杨爱英, 冯立辉, 等. 可见光定位关键技术的研究与展望[J]. 南京信息工程大学学报(自然科学版), 2017, 9(2): 159-167. WU Nan, YANG Aiying, FENG Lihui, et al. Review on indoor positioning technology based on visible light communications[J]. Journal of Nanjing University of Information Science and Technology (Natural Science Edition), 2017, 9(2): 159-167. |
| [4] |
迟楠, 陈慧. 高速可见光通信的前沿研究进展[J]. 光电工程, 2020, 47(3): 1-12. CHI Nan, CHEN Hui. Progress and prospect of high-speed visible light communication[J]. Opto-Electronic Engineering, 2020, 47(3): 1-12. |
| [5] |
LUO Junhai, FAN Liying, LI Husheng. Indoor positioning systems based on visible light communication: state of the art[J]. IEEE Communications Surveys & Tutorials, 2017, 19(4): 2871-2893. |
| [6] |
贾兰芳, 周小芳, 吕丽君. 基于光信号强度检测法的可见光通信定位方法研究[J]. 激光杂志, 2021, 42(5): 97-101. JIA Lanfang, ZHOU Xiaofang, LV Lijun. Research on visible light communication location method based on optical signal intensity detection[J]. Laser Journal, 2021, 42(5): 97-101. |
| [7] |
张雁鹏, 胥亚丽, 马军民, 等. 基于可见光通信和接收信号强度检测的列车定位方法研究[J]. 铁道科学与工程学报, 2021, 18(2): 485-493. ZHANG Yanpeng, XU Yali, MA Junming, et al. A novel method of train positioning using visible light communication and received signal strength indication[J]. Journal of Railway Science and Engineering, 2021, 18(2): 485-493. |
| [8] |
吴让仲, 刘珂, 周峰, 等. 结合PWC技术的LED室内定位算法[J]. 华中科技大学学报(自然科学版), 2021, 49(5): 7-12. WU Rangzhong, LIU Ke, ZHOU Feng, et al. LED based indoor positioning algorithm combined with PWC[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2021, 49(5): 7-12. |
| [9] |
ZHENG Zhong, LIU Lu, HU Weiwei. Accuracy of ranging based on DMT visible light communication for indoor positioning[J]. IEEE Photonics Technology Letters, 2017, 29(8): 679-682. DOI:10.1109/LPT.2017.2677424 |
| [10] |
关伟鹏, 吴玉香, 文尚胜, 等. 基于CDMA调制的可见光通信室内定位技术的研究[J]. 光学学报, 2016, 36(11): 66-74. GUAN Weipeng, WU Yuxiang, WEN Shangsheng, et al. Indoor positioning technology of visible light communication based on CDMA modulation[J]. Acta Optica Sinica, 2016, 36(11): 66-74. |
| [11] |
张慧颖, 于海越, 王凯, 等. 基于KPCA-K-means++和GA-LMS模型的改进RBF神经网络室内可见光定位[J]. 光学学报, 2021, 41(19): 64-73. ZHANG Huiying, YU Haiyue, WANG Kai, et al. Indoor visible light positioning of improved RBF neural network based on KPCA-K-means++ and GA-LMS model[J]. Acta Optica Sinica, 2021, 41(19): 64-73. |
| [12] |
曹燕平, 李晓记, 胡云云. 基于可见光指纹的室内高精度定位方法[J]. 激光与光电子学进展, 2019, 56(16): 8-13. CAO Yanping, LI Xiaoji, HU Yunyun. Visible light fingerprint-based high-accuracy indoor positioning method[J]. Laser & Optoelectronics Progress, 2019, 56(16): 8-13. |
| [13] |
徐世武, 吴怡, 王徐芳. 基于稀疏度自适应和位置指纹的可见光定位算法[J]. 光学学报, 2020, 40(18): 32-40. XU Shiwu, WU Yi, WANG Xufang. Visible light positioning algorithm based on sparsity adaptive and location fingerprinting[J]. Acta Optica Sinica, 2020, 40(18): 32-40. |
| [14] |
SUN Xuqing, DUAN Jingyuan, ZOU Yonggang, et al. Impact of multipath effects on theoretical accuracy of TOA-based indoor VLC positioning system[J]. Photonics Research, 2015, 3(6): 296-299. DOI:10.1364/PRJ.3.000296 |
| [15] |
DO T H, HWANG J, YOO M. TDoA based indoor visible light positioning systems[C]//Proceedings of the 5th International Conference on Ubiquitous and Future Networks. Da Nang, Vietnam: IEEE, 2013: 456-458.
|
| [16] |
LEE S, JUNG S Y. Location awareness using angle-of-arrival based circular-PD-array for visible light communication[C]//Proceedings of the 2012 18th Asia-Pacific Conference on Communications. Jeju Island, Korea: IEEE, 2012: 480-485.
|
| [17] |
EROGLU Y S, GUVENC I, PALA N, et al. AOA-based localization and tracking in multi-element VLC systems[C]//Proceedings of the IEEE 16th Annual Wireless and Microwave Technology Conference (WAMICON). Cocoa Beach, FL, USA: IEEE, 2015: 1-5
|
| [18] |
曹阳, 党宇超, 彭小峰, 等. TOA/RSS混合信息室内可见光定位方法[J]. 中国激光, 2021, 48(1): 133-141. CAO Yang, DANG Yuchao, PENG Xiaofeng, et al. Indoor visible light localization method using TOA/RSS hybrid information[J]. Chinese Journal of Lasers, 2021, 48(1): 133-141. |
| [19] |
王旭东, 董文杰, 吴楠. 基于TDOA/AOA混合的高精度室内可见光定位算法[J]. 系统工程与电子技术, 2019, 41(10): 2371-2377. WANG Xudong, DONG Wenjie, WU Nan. Hybrid TDOA/AOA algorithm based high accuracy indoor visible light positioning[J]. Systems Engineering and Electronics, 2019, 41(10): 2371-2377. DOI:10.3969/j.issn.1001-506X.2019.10.29 |
| [20] |
ȘIN A, EROǦLU Y S, GÜVENÇ İ, et al. Hybrid 3-D localization for visible light communication systems[J]. Journal of Lightwave Technology, 2015, 33(22): 4589-4599. DOI:10.1109/JLT.2015.2477502 |
| [21] |
徐世武, 吴怡, 王徐芳. 基于粒子群优化压缩感知的可见光定位算法[J]. 中国激光, 2021, 48(3): 75-84. XU Shiwu, WU Yi, WANG Xufang. Visible light positioning algorithm based on particle swarm optimization compressed sensing[J]. Chinese Journal of Lasers, 2021, 48(3): 75-84. |
| [22] |
冯人海, 常燕燕, 葛磊蛟, 等. 基于可见光携能通信的线性迭代定位算法[J]. 天津大学学报(自然科学与工程技术版), 2021, 54(4): 411-417. FENG Renhai, CHANG Yanyan, GE Leijiao, et al. Linear iterative location algorithm based on visible light energy carrying communication[J]. Journal of Tianjin University (Science and Technology), 2021, 54(4): 411-417. |
| [23] |
陈勇, 郑瀚, 沈奇翔, 等. 基于改进免疫粒子群优化算法的室内可见光通信三维定位方法[J]. 电子与信息学报, 2021, 43(1): 101-107. CHEN Yong, ZHENG Han, SHEN Qixiang, et al. Indoor three-dimensional positioning system based on visible light communication using improved immune PSOs algorithm[J]. Journal of Electronics & Information Technology, 2021, 43(1): 101-107. |
| [24] |
魏政帅, 薛琦, 孙晓红, 等. 基于自适应滤波器的高精度可见光定位方法[J]. 光通信技术, 2021, 45(9): 5-10. WEI Zhengshuai, XUE Qi, SUN Xiaohong, et al. High precision visible light positioning method based on adaptive filter[J]. Optical Communication Technology, 2021, 45(9): 5-10. |
| [25] |
乔磊, 李野, 施安存, 等. 基于多个传感器的VLC室内定位算法研究[J]. 半导体光电, 2018, 39(2): 280-285. QIAO Lei, LI Ye, SHI Ancun, et al. Research on VLC indoor location algorithm based on multiple sensors[J]. Semiconductor Optoelectronics, 2018, 39(2): 280-285. |
| [26] |
XIE Canyu, GUAN Weipeng, WU Yuxiang, et al. The LED-ID detection and recognition method based on visible light positioning using proximity method[J]. IEEE Photonics Journal, 2018, 10(2): 1-16. |
| [27] |
曲若彤, 冯立辉, 杨爱英, 等. 可见光定位系统中扩展LED ID的双频率或运算调制方法[J]. 光学技术, 2020, 46(6): 677-683. QU Ruotong, FENG Lihui, YANG Aiying, et al. Dual frequency or arithmetic modulation method for expanding LED ID in visible light positioning system[J]. Optical Technique, 2020, 46(6): 677-683. |
| [28] |
GUAN Weipeng, LI Jingyi, WEN Shangsheng, et al. The detection and recognition of RGB-LED-ID based on visible light communication using convolutional neural network[J]. Applied Sciences, 2019, 9(7): 1400. DOI:10.3390/app9071400 |
| [29] |
孙森震, 李广云, 王力, 等. 可见光通信平板光源高精度视觉室内定位方法[J]. 测绘科学技术学报, 2021, 38(3): 259-266. SUN Senzhen, LI Guangyun, WANG Li, et al. High-precision visual indoor positioning method with the rectangular light source based on visible light communication[J]. Journal of Geomatics Science and Technology, 2021, 38(3): 259-266. |
| [30] |
YAN Jun, ZHU Bingcheng, CHEN Liang, et al. Error analysis on indoor localization with visible light communication[J]. Remote Sensing, 2019, 11(4): 427. DOI:10.3390/rs11040427 |
| [31] |
孙森震, 李广云, 冯其强, 等. 可见光通信与双目视觉的室内定位[J]. 光学精密工程, 2020, 28(4): 834-843. SUN Senzhen, LI Guangyun, FENG Qiqiang, et al. Indoor positioning based on visible light communication and binocular vision[J]. Optics and Precision Engineering, 2020, 28(4): 834-843. |
| [32] |
JI Yongqing, XIAO Chunxian, GAO Jian, et al. A single LED lamp positioning system based on CMOS camera and visible light communication[J]. Optics Communications, 2019, 443: 48-54. DOI:10.1016/j.optcom.2019.03.002 |
| [33] |
王杨, 赵红东. 基于智能手机的VLC/IPDR粒子滤波融合室内定位[J]. 中国激光, 2020, 47(7): 365-373. WANG Yang, ZHAO Hongdong. VLC/RDR particle filter fusion indoor positioning based on smartphone[J]. Chinese Journal of Lasers, 2020, 47(7): 365-373. |
| [34] |
李锦, 莫巨明, 方俊键, 等. 基于LED照明灯光的可见光室内停车场定位导航系统[J]. 应用光学, 2019, 40(5): 746-750. LI Jin, MO Juming, FANG Junjian, et al. Visible light indoor parking lot positioning navigation system based on LED lighting[J]. Journal of Applied Optics, 2019, 40(5): 746-750. |
| [35] |
陈雷, 成爽. 基于可见光通信的停车场泊车自动导航系统[J]. 激光杂志, 2021, 42(2): 125-129. CHEN Lei, CHENG Shuang. Parking automatic navigation system based on visible light communication[J]. Laser Journal, 2021, 42(2): 125-129. |
| [36] |
陈伟. 基于可见光与成像通信技术的煤矿人员精确定位方法[J]. 煤矿安全, 2019, 50(12): 114-117. CHEN Wei. Research on personnel precise positioning method of coal mine based on visible light and imaging communication technology[J]. Safety in Coal Mines, 2019, 50(12): 114-117. |
| [37] |
范辉, 李帅华, 孟良, 等. 基于VLC+PLC的电缆隧道通信及定位系统设计与开发[J]. 电力信息与通信技术, 2016, 14(6): 105-108. FAN Hui, LI Shuaihua, MENG Liang, et al. Design and development of communication and positioning system of cable trench based on VLC+PLC[J]. Electric Power Information and Communication Technology, 2016, 14(6): 105-108. |
| [38] |
叶佳林, 岳宗杰, 陈林君, 等. 基于可见光定位的智能化无人超市系统设计[J]. 自动化与仪器仪表, 2020(7): 90-93. YE Jialin, YUE Zongjie, CHEN Linjun, et al. Design of intellectual unmanned supermarket system based on visible light location[J]. Automation & Instrumentation, 2020(7): 90-93. |
| [39] |
沈芮, 张剑. 基于可见光通信的室内定位方法[J]. 信息工程大学学报, 2014, 15(1): 41-45. SHEN Rui, ZHANG Jian. Indoor location method based on visible light communication[J]. Journal of Information Engineering University, 2014, 15(1): 41-45. |
| [40] |
赵响. 基于成像传感器的可见光定位理论与技术研究[D]. 西安: 西安电子科技大学, 2017. ZHAO Xiang. Research on theory and technology of visible light positioning based on Image sensor[D]. Xi'an: Xidian University, 2017. |
| [41] |
LIN Zongjian, XIE Feifei, SU Guozhong. Accuracy analysis of low altitude photogrammetry with wide-angle camera[J]. Journal of Geodesy and Geoinformation Science, 2018(1): 30-38. DOI:10.11947/j.JGGS.2018.0104 |