


2. 武汉大学测绘学院, 湖北 武汉 430079;
3. 武汉大学地球空间环境与大地测量教育部重点实验室, 湖北 武汉 430079
2. School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China;
3. Key Laboratory of Geospace Environment and Geodesy, Ministry of Education, Wuhan University, Wuhan 430079, China
全球卫星导航系统可在全球范围内全天候地为用户提供高精度定位信息,并且随着低成本GNSS定位终端的广泛普及,众多车载模组产品可以在开阔环境中实现动态分米到厘米级定位[1-3]。然而,有源非自主的GNSS定位技术,易受高楼高架、隧道等城市复杂环境的影响,无法提供准确、连续、可靠的位置信息。因此,多源融合定位成为低成本车载导航的重要技术手段,主要从以下3个方面进行多传感器集成:①引入无源自主定位传感器,如MEMS(micro-electro-mechanical system)、里程计、磁罗盘、汽车CAN(controller area network)总线(提供轮速和转向)等,利用自主航位推算解决复杂环境下GNSS定位结果连续性和可用性差的问题[4-6]。②增加环境特征识别传感器,如摄像头、激光雷达、导航地图等,通过获取环境特征信息进行特征匹配与地图匹配定位,增强复杂环境下车载融合定位的可靠性[7-8]。③构建虚拟观测传感器,如车辆侧向和垂向速度为零的非完整性约束(non-holonomic constraint,NHC)、静止停车时三维速度为零的零速/零角速更新等,利用地面车辆运动受限的隐含信息,为无源自主航位推算系统提供虚拟的外部观测校正,提高复杂环境下车载融合定位的精度维持能力[9-12]。从目前应用来看,集成GNSS与MEMS及车载CAN总线传感器,并融入车辆运动约束信息,是最为简单有效的车载低成本高精度导航方案。
在车载组合导航中,如何有效抑制惯性推算误差的快速累积一直是核心难题,也是实现复杂场景下定位连续可用性的关键。除了前述利用冗余传感器组合及车辆运动约束之外,也有学者尝试通过神经网络、机器学习等高级算法直接训练惯导输出与定位结果之间的映射关系。当GNSS信号失锁时,利用训练模型输出位置、速度等虚拟观测值进行融合[13-16]。文献[17]则从状态模型本身出发,提出以运动学数学模型代替动力学物理模型的多传感器集成新策略,能够提升GNSS中断期间的车载定位精度。针对惯导高频噪声及噪声有色性导致的推算误差,文献[14, 18]利用经验模态分解和小波分析技术削弱高频噪声,文献[19—21]采用高阶AR模型对惯导有色噪声进行建模补偿,文献[22]针对量化噪声的建模补偿开展了细致研究,上述测试结果均表明惯性推算误差得到了一定程度上的抑制。在2017年中国卫星导航年会上,卡尔加里大学El-Sheimy教授报道了目前车载消费级MEMS推算误差最好的研究结果,采用Ublox和MPU9250(消费级MEMS)组合,1 min失锁的最大漂移误差为3.9 m,10 min失锁的相对精度为行车距离的0.72%,然而,并没有给出具体实现细节。
目前能够有效抑制惯性推算误差仍以“CAN总线+车辆运动约束”的方案最佳,尤其是通过非完整性约束与里程计共同形成三维速度进行辅助[23]。在车辆运动约束中,合理配置相关参数(如虚拟观测值及其方差、零速检测阈值等)是约束条件能否充分发挥作用的关键。然而,这些参数均与车辆运动状态、车身振动、惯导安装位置及安置角度等影响因素存在复杂的关系,难以确定出相应的显式表达式,仅凭人工调参很难给出最优配置方案,不能充分发挥约束条件对惯性推算误差的抑制作用。针对上述问题,文献[24]首次引入基于卷积神经网络的深度学习方法,初步实现了惯导输出与非完整性约束观测方差之间映射关系的智能学习,通过自主化的参数最优配置,提升了惯性推算误差的抑制效果。然而,现有研究主要在方差域调整NHC观测噪声来改变其约束的松紧程度,其本质是通过方差膨胀使得以零为中心的协方差椭球能够包住真实的侧向/垂向速度,但在一定程度上损失了约束信息。本文则从观测域出发,提出车辆运动约束信息的多元回归和深度学习方法,利用开阔环境下GNSS/SINS的标签数据直接训练侧向/垂向速度模型,在GNSS失锁时,利用参数自主学习的车辆运动约束信息来抑制惯性推算误差。
1 车载导航基本模型及其非完整性约束分析现有车载导航系统主要通过集成GNSS与捷联惯导(strapdown inertial navigation system,SINS)及车载CAN总线传感器,并融入车辆运动约束信息来实现,其中GNSS提供绝对定位与测速信息,SINS经机械编排获得连续的全导航信息,CAN总线可输出车辆轮速及转向信息。在GNSS信号失锁时,融入车辆运动约束信息能够进一步抑制惯性推算误差,由于非完整性约束方法简单有效,在车辆运动约束中研究较为广泛。
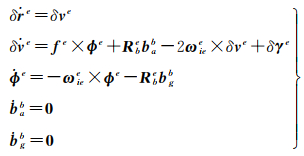
1.1 GNSS/SINS组合导航模型在GNSS/SINS组合导航系统中,选取机械编排的位置误差δre、速度误差δve、失准角ϕe,以及加计零偏bab与陀螺零偏bgb构建状态向量,即
 (1)
(1)
SINS误差状态的微分方程为[25]
 (2)
(2)
式中,Rbe是b系到e系的旋转矩阵;fb是b系下的加计输出;γe是地球重力项;ωiee是地球自转项。
在松组合模式中,使用GNSS定位结果与机械编排位置构造观测方程为
 (3)
(3)
观测矩阵为
 (4)
(4)
式中,

在紧组合模式中,还需要加入GNSS相关的参数,如接收机钟差、模糊度、对流层湿延迟等状态,并使用GNSS原始观测值构造观测方程,其观测方程形式与单GNSS定位基本保持一致。
1.2 车辆非完整性约束观测模型根据车辆运动规律,当载体正常行驶中不出现侧滑、漂移、弹跳等特殊运动时,车辆侧向和垂向速度分量为零,可构造NHC虚拟观测量抑制惯性推算误差
 (5)
(5)
假设车辆坐标系与惯导坐标系一致,则有如下关系
 (6)
(6)
式中,vb表示车辆坐标系下的速度;
 (7)
(7)
取b系X方向与Z方向(侧向与垂向),可得相应的观测矩阵为
 (8)
(8)
本文主要讨论NHC模型,若车辆可获得CAN总线输出的轮速和转向信息,可进一步构建相应的约束信息进行观测更新。
1.3 车辆非完整性约束分析在实际车辆导航中,车辆运动状态、车身振动、惯导安装位置以及安置角度等影响因素,使得车辆侧向和垂向速度为零的这一假设条件无法满足,导致NHC虚拟观测值存在误差,从而影响惯性误差推算的抑制效果。
图 1表示了NHC虚拟观测、真实观测及更新过程之间的关系。图 1(a)表明,当虚拟观测设为零且观测方差不做调整时,NHC误差椭圆无法包含真实的NHC观测值,最终的状态估值将偏离真实状态。因此,现有的改进方法往往是放大NHC的观测方差,使得膨胀后的误差椭圆能够包住真实的NHC观测值,即图 1(b)所示,这种方法是在方差域进行参数调整,虽然估值已经在接近真实状态,但是最终估值的状态方差会变大,表明估计精度不好。因此,本文从观测域出发,直接调整NHC观测值,而固定其观测方差,这种新思路更符合实际情况,如图 1(c)所示,这种方法更新得到的估值最终接近真实状态,且其误差椭圆也较小,表明该结果具有较好估计准确度(accuracy)与精度(precision)。

|
| 图 1 3种车辆非完整性约束方法 Fig. 1 The three vehicle NHC methods |
基于观测域调整参数的新思路,其关键在于如何获得准确的NHC观测值。车辆实际运动过程中,侧向/垂向速度的变化与众多复杂影响相关,例如惯导前向速度Vyb′在安置角作用下会产生横向的速度分量V2b,导致NHC虚拟观测量产生误差,该误差量与前向速度幅值相关,如图 2(a)所示。而车辆转弯运动的情况则更为复杂,如图 2(b)所示,根据阿克曼转向原理,理想情况下所有车轮绕同一点O′做瞬时圆周转动,因此惯导理论速度V′的方向应垂直于后轮轴线。然而车辆实际载荷结构不匀称、惯导安装位置与车辆旋转质心之间的杆臂作用,以及路面湿滑导致载体侧向漂移等多种原因,导致理论转动点O′与实际转动点O无法重合,使实际速度V偏离了载体正前方,从而产生了侧向速度分量,该分量大小与转弯幅度相关。为此,本文通过多元回归和深度学习方法,自主学习NHC观测值与影响因子之间的映射关系,从而近似得到NHC观测值变化模型。

|
| 图 2 不同行驶状态下的车辆非完整性约束 Fig. 2 The vehicle NHC of different driving state |
2 基于参数自主学习的车辆非完整性约束模型构建
基于参数自主学习的车辆运动约束模型构建的整体思路如下:当GNSS观测条件良好时,训练车辆侧向/垂向速度与影响因子之间的映射关系;当GNSS不可用时,通过学习得到的映射模型推断车辆侧向/垂向速度,形成NHC约束信息,具体实施过程如图 3所示。

|
| 图 3 参数自主学习的车辆运动约束模型构建与使用 Fig. 3 Construction and application of vehicle motion constraint model with parameter autonomous learning |
在得到车辆侧向速度f(vxb)与垂向速度f(vzb)后,替换式(5)中的零速观测,形成新的观测方程为
 (9)
(9)
具体模型构建中,本文选用多元回归与深度学习两种方法,实现观测域的NHC参数自主学习。
2.1 多元回归方法由前述车辆非完整性约束分析可知,车辆侧向和垂向速度与车辆运动状态等因素密切相关,本文初步研究了两种车辆常规运动下的模型构建,即直线行驶和转弯行驶。此外,考虑到组合导航系统的水平误差相较于垂向误差发散得更快,这里重点考虑侧向速度约束。由于侧向速度与车辆前向行驶速度、转弯角速度呈现出较强的相关性,这里给出了两类回归模型。
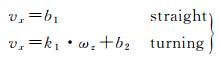
(1) 直线时仅利用前向速度拟合,转弯时利用前向速度和转弯角速度的线性叠加进行拟合
 (10)
(10)
(2) 直线时直接利用GNSS/SINS输出的侧向速度求平均,转弯时利用转弯角速度进行拟合
 (11)
(11)
式中,vx、vy分别是车辆的侧向速度与前向速度;ωz是通过陀螺Z轴输出得到的角速度;系数k与b是在GNSS可用时在线拟合确定的参数。考虑到有些车载导航系统可能无法获取CAN总线的车辆速度信息,因此提供了第二种不依赖于前向速度的拟合模型。
对于车辆运动状态的在线判别,可简单利用窗口时间内陀螺Z轴的输出量来计算航向角速度,作为车辆是否转弯的判据,具体表示为[26]
 (12)
(12)
式中,δYaw是航向平均角速度;gz是陀螺Z轴直接输出的角速度;dt是采样时间间隔;T为窗口时长,T对应的N为窗口内的数据总量,判别阈值λδYaw可设置为1.5 deg/s。
图 4展示了实测车载数据的转弯情况,可以看到大部分亮色轨迹都位于车辆转弯处,可以较好地识别出直行或转弯两类车辆运动行为。

|
| 图 4 实测路段的航向角速度变化 Fig. 4 Change of heading angle velocity of measured trajectory |
2.2 深度学习方法
多元回归方法需要事先确定影响因素或变量因子,并且仅具有线性学习能力。然而,车辆运动约束与车辆行驶状态、车身振动、设备安装位置以及安置角度等众多影响因素存在复杂的非线性关系,多元回归方法存在一定局限性,而深度学习方法对这种复杂的隐式映射关系却有较好的自主学习能力,可通过数据驱动知识发现,来挖掘出内在的耦合关系。因此,本文基于卷积神经网络的深度学习方法来构建车辆运动约束模型。
如图 5所示,该神经网络为一维卷积神经网络,共设计两层。其中输入为N×6大小的二维矩阵图像,由连续N个历元的惯导六轴数据形成。第一层卷积核大小为5,输出维度为32,膨胀系数为1,每个维度上经过卷积和边界填充后变为N×1的向量。第二层卷积核大小为5,输出维度32,膨胀系数为3,边界填充及不同卷积结果组合的过程与第一层相同。两层之间的激活函数均采用ReLU函数,每层的Dropout系数为0.5。然后通过全连接层进行维度变换,输出侧向速度和垂向速度的二维结果,该结果与惯导数据采样率一致,实际使用中可对其进行降采样处理再用于组合导航滤波解算。

|
| 图 5 卷积神经网络结构 Fig. 5 Convolutional neural network structure |
该模型使用历史数据作为训练集,当GNSS可用时,由GNSS/SINS融合解算可以得到侧向/垂向速度真值,同时与相应的惯导六轴输出打包形成标签数据。构造的损失函数即为训练输出的侧向/垂向速度与真值之间差值向量的二范数。在训练过程中,若反向传播后的相关计算值小于阈值,则对神经网络进行参数更新,否则就直接开始下一次训练,直到训练次数达到设定值。为避免发生过拟合现象,训练过程中使用了数据增强和Dropout技术。其中数据增强是在原始惯导数据上随机加入量级较小的高斯白噪声,并重新对惯导六轴数据进行归一化处理,Dropout技术则是在前向传播时,令某个神经元的激活值以一定概率停止工作。
3 测试分析与初步结果本文采用一组实测车载数据对参数自主学习的车辆运动约束新模型进行了初步验证与分析。该试验利用Novatel公司的SPAN-FSAS组合导航系统,于2021年1月14日在武汉市采集获得了运动轨迹较为丰富的数据,如图 6所示。其中,随机截取了4组不同轨迹形状的数据进行测试分析,通过模拟GNSS信号中断来验证NHC约束效果。此外,以GNSS/SINS紧组合双向平滑后处理结果作为参考真值。

|
| 图 6 车辆行驶轨迹及选取的4组试验路段 Fig. 6 Vehicle track and 4 test roads |
试验路段的基本情况见表 1。在模拟GNSS信号失锁期间,仅使用NHC约束进行观测更新,并设置了观测方差自适应的传统模型作为对照组。由于组合导航系统的水平误差相较于垂向误差发散得更快,这里重点考察侧向速度约束效果。
| 组别 | 距离/km | 时长/s |
| 路段1 | 1.85 | 200 |
| 路段2 | 2.55 | 260 |
| 路段3 | 1.89 | 210 |
| 路段4 | 1.55 | 180 |
首先分析多元回归方法的车辆运动约束模型结果。以试验路段1为例,当导航系统发现GNSS信号失锁后,则利用之前的历史数据启动多元回归模型参数求解,然后逐历元预测当前的侧向速度,如图 7所示。

|
| 图 7 多元回归模型预测的侧向速度与参考速度对比 Fig. 7 Comparison between lateral predicted velocity of multivariate regression models and reference velocity |
由图 7可知,第一种多元回归模型的侧向速度预测效果较好,无论是直行路段还是转弯路段,预测速度均与参考真值的趋势保持一致。第二种多元回归模型在直行时只能使用固定值,预测结果无法反映细微变化;转弯时预测精度较好,但不如第一种模型的精度高。利用图 7中预测得到的速度观测值进行NHC/SINS融合解算,得到的侧向、前向及平面的惯性推算误差序列如图 8所示。

|
| 图 8 多元回归模型下NHC/SINS融合定位误差 Fig. 8 Positioning error of NHC/SINS fusion based on multivariate regression models |
由于第一种多元回归模型的预测精度较高,水平误差发散较为缓慢,总体而言,两种模型都能有效抑制惯性误差发散,在200 s的时间内行驶里程为1.85 km,水平相对误差分别为2.1‰和3.1‰。可以看到,当车辆转弯的时候,由于侧向速度预测精度变差,相应的定位误差也变大,此外,不同处的转弯对侧向与前向误差的影响也不一致,这与载体机动带来可观测性变化有一定关联。
4组试验路段的统计指标如图 9所示,相比于方差域调整参数的传统方法(TRA),在观测域进行多元回归的新模型具有显著的精度提升,由于第一种多元回归模型(MR1)考虑了更多变量因子,其约束效果普遍优于第二种模型(MR2)。此外,相比于传统模型,第一种多元回归模型的水平位置最大误差减小了70.2%~82.1%,水平位置误差RMS减小了69.6%~81.2%。

|
| 图 9 两种多元回归模型与传统模型的水平定位误差统计结果比较 Fig. 9 Statistical comparison of horizontal positioning errors between two multivariate regression models and traditional model |
下面分析基于深度学习方法的车辆运动约束模型结果,同样以试验路段1为例,其预测的侧向速度及其约束后的定位误差序列如图 10所示。

|
| 图 10 深度学习模型预测的侧向速度及其水平定位误差序列 Fig. 10 Lateral velocity predicted by depth learning model and its horizontal positioning error sequence |
利用深度学习模型(NN)预测得到的侧向速度与参考速度的变化趋势高度吻合,但在某些历元处(如40 s处)的预测精度不如多元回归模型,该影响在定位误差序列中也可以看到,即60 s之前深度学习预测的侧向速度精度不如多元回归模型,此时定位误差发散速度也更快。但随后侧向速度的预测精度变好,相应的惯性误差发散也有所缓解。
如图 11所示,将第一种多元回归模型、深度学习模型和传统模型进行比较,在全部4组试验路段中,深度学习模型的水平位置最大误差相较于传统方法减小了49.4%~74.9%,水平位置误差RMS减小了60.0%~77.3%,并在第2组试验路段略优于多元回归模型。

|
| 图 11 深度学习模型、多元回归模型与传统模型的统计结果比较 Fig. 11 Statistical comparison between deep learning model, multiple regression model and traditional model |
所有路段的水平相对误差统计情况如表 2所示,其中多元回归模型的水平相对误差在2.1‰~3.7‰,深度学习模型不同路段水平相对误差在3.1‰~5.9‰,相较于传统模型平均提升了75.2%和65.0%。
| 水平相对误差/(‰) | 路段1 | 路段2 | 路段3 | 路段4 | 平均 |
| 传统模型 | 8.4 | 12.0 | 13.4 | 12.8 | 11.7 |
| 多元回归模型 | 2.1 | 3.6 | 3.7 | 2.3 | 2.9 |
| 深度学习模型 | 4.3 | 3.1 | 5.9 | 3.2 | 4.1 |
在行驶路线较少重叠的试验路段3中,多元回归模型、深度学习模型及传统模型的轨迹对比如图 12所示,可以看到,传统模型在第二次转弯后就逐渐偏离了道路,而参数自主学习的车辆运动约束新模型始终维持了较高的惯性推算精度。从试验结果来看,本文提出的新模型相较于传统模型具有十分显著的提升效果,然而,相较于多元回归模型,深度学习模型并没有表现出较为显著的优势,由于目前仅做了初步尝试,其中可能与网络结构、设计技巧、训练数据量等细节缺乏优化有关,随着未来车辆运动约束的进一步研究,深度学习模型有望进一步提高精度。

|
| 图 12 试验路段3的不同模型轨迹对比 Fig. 12 Trajectory comparison of different models in test road 3 |
4 结语
在车载组合导航系统中使用车辆运动约束可有效抑制惯性推算误差,提高GNSS不可用时的系统定位精度。由于车辆运动学约束在实际应用中难以满足其假设条件,需要对相关参数进行合理配置,因此本文采用多元回归与深度学习方法,构建了在观测域上进行参数自主学习的车辆运动约束新模型。该模型通过在GNSS观测条件良好时建立的模型映射关系,用于惯性自主推算时的车辆侧向与垂向速度预测,相比基于方差域的调参方法具有更好的约束效果。试验结果表明,相比于方差域调参的传统方法,采用多元回归模型的惯性推算误差RMS在水平位置上减小了69.6%~81.2%,而利用深度学习则减小了60.0%~77.3%。同时,水平相对定位精度分别提升了75.2%和65.0%,能有效提高GNSS失效时车载定位精度维持能力。本文提出的多元回归模型与深度学习模型的改善效果均较为显著,未来随着网络结构优化、模型设计完善、数据质量提升,基于深度学习的车辆运动约束模型有望进一步提高预测准确度,具有一定的应用潜能。
| [1] |
ODOLINSKI R, TEUNISSEN P J G. Single-frequency, dual-GNSS versus dual-frequency, single-GNSS: a low-cost and high-grade receivers GPS-BDS RTK analysis[J]. Journal of Geodesy, 2016, 90(11): 1255-1278. DOI:10.1007/s00190-016-0921-x |
| [2] |
COZZENS T. Qianxun SI, u-blox plan to bring mass-market high-precision positioning to China[EB/OL]. (2018-05-10)[2022-02-01]. https://www.gpsworld.com/qinxun-si-u-box-plan-to-bring-mass-market-high-preci-sion-positioning-to-china.
|
| [3] |
雷哲哲, 黄观文, 杜源, 等. 低成本U-blox模块的单频GPS/BDS增强PPP定位性能分析[J]. 导航定位与授时, 2019, 6(1): 74-80. LEI Zhezhe, HUANG Guanwen, DU Yuan, et al. Single frequency GPS/BDS enhanced PPP positioning performance analysis of low cost U-blox module[J]. Navigation Positioning and Timing, 2019, 6(1): 74-80. |
| [4] |
孙红星. 差分GPS/INS组合定位定姿及其在MMS中的应用[D]. 武汉: 武汉大学, 2004. SUN Hongxing. DGPS/INS integrated position and attitude determination and its application in MMS[D]. Wuhan: Wuhan University, 2004. |
| [5] |
严恭敏, 秦永元, 马建萍. 惯导/里程仪组合导航系统算法研究[J]. 计算机测量与控制, 2006, 14(8): 1087-1089. YAN Gongmin, QIN Yongyuan, MA Jianping. Research on INS/OD integrated navigation system algorithm[J]. Computer Measurement&Control, 2006, 14(8): 1087-1089. |
| [6] |
CHIANG K W, CHANG H W, LI Yuhua, et al. Assessment for INS/GNSS/odometer/barometer integration in loosely-coupled and tightly-coupled scheme in a GNSS-degraded environment[J]. IEEE Sensors Journal, 2020, 20(6): 3057-3069. DOI:10.1109/JSEN.2019.2954532 |
| [7] |
GROVES P D. Principles of GNSS, inertial, and multisensor integrated navigation systems[M]. America: Artech House Publishers, 2008.
|
| [8] |
LI Deyi, GAO Hongbo. A hardware platform framework for an intelligent vehicle based on a driving brain[J]. Engineering, 2018, 4(4): 464-470. DOI:10.1016/j.eng.2018.07.015 |
| [9] |
SHIN E H. Accuracy improvement of low cost INS/GPS for land applications[D]. Calgary, Alberta, Canada: University of Calgary, 2001.
|
| [10] |
GODHA S. Performance evaluation of low cost MEMS-based IMU integrated with GPS for land vehicle navigation application[D]. Calgary, Alberta, Canada: University of Calgary, 2006.
|
| [11] |
柴艳菊. 挖掘信息提高GPS/INS导航精度的理论与方法研究[J]. 测绘学报, 2010, 39(3): 328. CHAI Yanju. Theory and method for improving the navigation accuracy of GPS/INS integration by extraction of the hidden information[J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(3): 328. |
| [12] |
吴富梅, 杨元喜. 附加速度先验信息的车载GPS/INS/Odometer组合导航算法[J]. 宇航学报, 2010, 31(10): 2314-2320. WU Fumei, YANG Yuanxi. GPS/INS/odometer integrated navigation algorithm with prior velocity in land vehicle system[J]. Journal of Astronautics, 2010, 31(10): 2314-2320. DOI:10.3873/j.issn.1000-1328.2010.10.013 |
| [13] |
CHIANG K W. INS/GPS integration using neural networks for land vehicular navigation applications[D]. Calgary, Alberta, Canada: University of Calgary, 2004.
|
| [14] |
ABDEL-HAMID W. Accuracy enhancement of integrated MEMS-IMU/GPS systems for land vehicular navigation applications[D]. Calgary, Alberta, Canada: University of Calgary, 2005.
|
| [15] |
SEMENIUK L, NOURELDIN A. Bridging GPS outages using neural network estimates of INS position and velocity errors[J]. Measurement Science and Technology, 2006, 17(10): 2783-2798. DOI:10.1088/0957-0233/17/10/033 |
| [16] |
高为广, 杨元喜, 张双成. 顾及动力学模型误差影响的GPS/INS组合导航自适应滤波算法[J]. 武汉大学学报(信息科学版), 2008, 33(2): 191-194. GAO Weiguang, YANG Yuanxi, ZHANG Shuangcheng. GPS/INS adaptive filtering considering the influences of kinematic model errors[J]. Geomatics and Information Science of Wuhan University, 2008, 33(2): 191-194. |
| [17] |
QIAN Kun, WANG Jianguo, HU Baoxin. Novel integration strategy for GNSS-aided inertial integrated navigation[J]. Geomatica, 2015, 69(2): 217-230. DOI:10.5623/cig2015-205 |
| [18] |
王坚, 李增科, 高井祥, 等. 基于EMD-小波随机消噪模型的GPS/INS组合导航[J]. 东南大学学报(自然科学版), 2012, 42(3): 406-412. WANG Jian, LI Zengke, GAO Jingxiang, et al. EMD-wavelet based stochastic error reducing model for GPS/INS integrated navigation[J]. Journal of Southeast University (Natural Science Edition), 2012, 42(3): 406-412. |
| [19] |
NASSAR S, SCHWARZ K P, EL-SHEIMY N, et al. Modeling inertial sensor errors using autoregressive (AR) models[J]. Navigation, 2004, 51(4): 259-268. DOI:10.1002/j.2161-4296.2004.tb00357.x |
| [20] |
NOURELDIN A, KARAMAT T B, EBERTS M D, et al. Performance enhancement of MEMS-based INS/GPS integration for low-cost navigation applications[J]. IEEE Transactions on Vehicular Technology, 2009, 58(3): 1077-1096. DOI:10.1109/TVT.2008.926076 |
| [21] |
李增科, 高井祥, 王坚, 等. 利用牛顿插值的GPS/INS组合导航惯性动力学模型[J]. 武汉大学学报(信息科学版), 2014, 39(5): 591-595. LI Zengke, GAO Jingxiang, WANG Jian, et al. Inertial dynamic model of GPS/INS integrated navigation based on newton interpolation[J]. Geomatics and Information Science of Wuhan University, 2014, 39(5): 591-595. |
| [22] |
韩松来. GPS和捷联惯导组合导航新方法及系统误差补偿方案研究[D]. 长沙: 国防科学技术大学, 2010. HAN Songlai. Novel GPS/SINS integration architechture and systematic error compensation methods[D]. Changsha: National University of Defense Technology, 2010. |
| [23] |
NIU Xiaoji, NASSAR S, EL-SHEIMY N. An accurate land-vehicle MEMS IMU/GPS navigation system using 3D auxiliary velocity updates[J]. Navigation, 2007, 54(3): 177-188. |
| [24] |
BROSSARD M, BARRAU A, BONNABEL S. AI-IMU dead-reckoning[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5(4): 585-595. DOI:10.1109/TIV.2020.2980758 |
| [25] |
朱锋. GNSS/SINS/视觉多传感器融合的精密定位定姿方法与关键技术[D]. 武汉: 武汉大学, 2019. ZHU Feng. GNSS/SINS/vision multi-sensors integration for precise position and orientation determination[D]. Wuhan: Wuhan University, 2019. |
| [26] |
胡昊杰, 朱锋, 张小红. 利用MEMS-IMU检测车辆运动状态的自适应方法[J]. 导航定位学报, 2020, 8(5): 11-18. HU Haojie, ZHU Feng, ZHANG Xiaohong. An adaptive method to detect vehicle motion state using MEMS-IMU[J]. Journal of Navigation and Positioning, 2020, 8(5): 11-18. |