


测绘学报 ›› 2025, Vol. 54 ›› Issue (8): 1452-1463.doi: 10.11947/j.AGCS.2025.20240459
赵一杰( ), 王君婷(), 徐天河, 舒建旭, 刘杨范
), 王君婷(), 徐天河, 舒建旭, 刘杨范
收稿日期:2024-11-18
修回日期:2025-07-07
出版日期:2025-09-16
发布日期:2025-09-16
通讯作者:
王君婷
E-mail:zhaoyjnice@163.com;wjtsci2015@163.com
作者简介:赵一杰(2001—),男,硕士生,研究方向为水下声学定位和多传感器组合导航。E-mail:zhaoyjnice@163.com
基金资助:
Yijie ZHAO(), Junting WANG(), Tianhe XU, Jianxu SHU, Yangfan LIU
Received:2024-11-18
Revised:2025-07-07
Online:2025-09-16
Published:2025-09-16
Contact:
Junting WANG
E-mail:zhaoyjnice@163.com;wjtsci2015@163.com
About author:ZHAO Yijie (2001—), male, postgraduate, majors in underwater acoustic positioning and multi-sensor integrated navigation. E-mail: zhaoyjnice@163.com
摘要:
海洋声速时空变化是水下声学导航定位中重要的误差来源。针对水下声速时变误差会严重影响水下基准定位精度的问题,本文提出了基于时变声速误差修正的水下基准标定方法,该方法首先利用基于经验正交函数的部分声速剖面匹配扩展方法将实测声速剖面延拓至海底基准布设深度;然后利用实测声速剖面数据构建基于最小二乘支持向量机的水下时分辨率声速预报模型,并根据试验的基准点标定数据时段预测声速剖面,最终基于预报声速剖面构建水下基准点定位时变声速误差实时修正模型。本文通过中国南海3000 m实测基准标定数据对提出算法进行验证分析,结果表明,以声线跟踪方法的标定结果为真值,相较于单声速剖面的加权平均声速法,本文方法对于测站1,标定的3D精度从0.839 m提高到了0.424 m,提高了49.5%;对于测站2,标定的3D精度从0.928 m提高到了0.19 m,提高了79.5%。因此本文方法能够较好地改正声速时变误差的影响,从而提高海底基准标定精度。
中图分类号:
赵一杰, 王君婷, 徐天河, 舒建旭, 刘杨范. 水下基准定位时变声速误差修正方法[J]. 测绘学报, 2025, 54(8): 1452-1463.
Yijie ZHAO, Junting WANG, Tianhe XU, Jianxu SHU, Yangfan LIU. Correction method for time-varying sound speed errors in underwater geodetic datum positioning[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(8): 1452-1463.
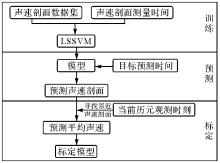
图1
LSSVM预测声速剖面流程"
表1
实测声速剖面信息"
| 声速剖面 | 测量开始时间 | 最大深度/m |
|---|---|---|
| SSP1 | 08-30 15:57 | 2921 |
| SSP2 | 23:58 09-02 | 3408 |
| SSP3 | 09-05 05:04 | 2983 |
| SSP4 | 09-06 13:32 | 2803 |
| SSP5 | 09-07 06:20 | 2787 |
| SSP6 | 09-10 07:58 | 2615 |
| SSP7 | 09-11 06:41 | 2504 |
| SSP8 | 09-12 01:29 | 3387 |
| SSP9 | 09-12 09:28 | 2978 |
| SSP10 | 09-14 10:16 | 2586 |
| SSP11 | 09-16 06:29 | 2811 |
| SSP12 | 09-17 23:59 | 3107 |
| SSP13 | 09-18 04:34 | 3086 |
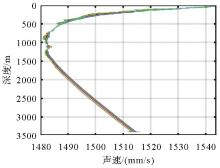
图2
延拓后的声速剖面"
表2
延拓结果对比"
| 声速剖面 | EOF-PSSP-ME | EOF |
|---|---|---|
| SSP1 | 0.375 5 | 0.810 1 |
| SSP3 | 0.761 6 | 0.920 8 |
| SSP4 | 0.583 2 | 0.562 8 |
| SSP5 | 0.591 0 | 0.655 8 |
| SSP6 | 0.431 8 | 0.813 1 |
| SSP7 | 0.390 8 | 0.962 8 |
| SSP9 | 0.662 5 | 1.305 2 |
| SSP10 | 0.834 1 | 1.183 7 |
| SSP11 | 0.483 4 | 1.360 9 |
| SSP12 | 0.696 2 | 1.133 5 |
| SSP13 | 0.733 7 | 1.629 3 |
| 平均RMS | 0.594 6 | 1.031 7 |
表3
LSSVM预测SSP精度"
| 声速剖面 | RMS |
|---|---|
| SSP1 | 0.959 8 |
| SSP2 | 0.551 2 |
| SSP3 | 0.052 4 |
| SSP4 | 0.631 5 |
| SSP5 | 0.775 1 |
| SSP6 | 0.260 1 |
| SSP7 | 0.324 7 |
| SSP8 | 0.745 8 |
| SSP9 | 0.228 2 |
| SSP10 | 1.176 9 |
| SSP11 | 0.482 6 |
| SSP12 | 0.717 8 |
| SSP13 | 0.395 1 |
| 平均RMS | 0.561 6 |
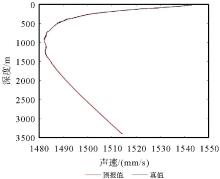
图3
SSP6预报值与真值"
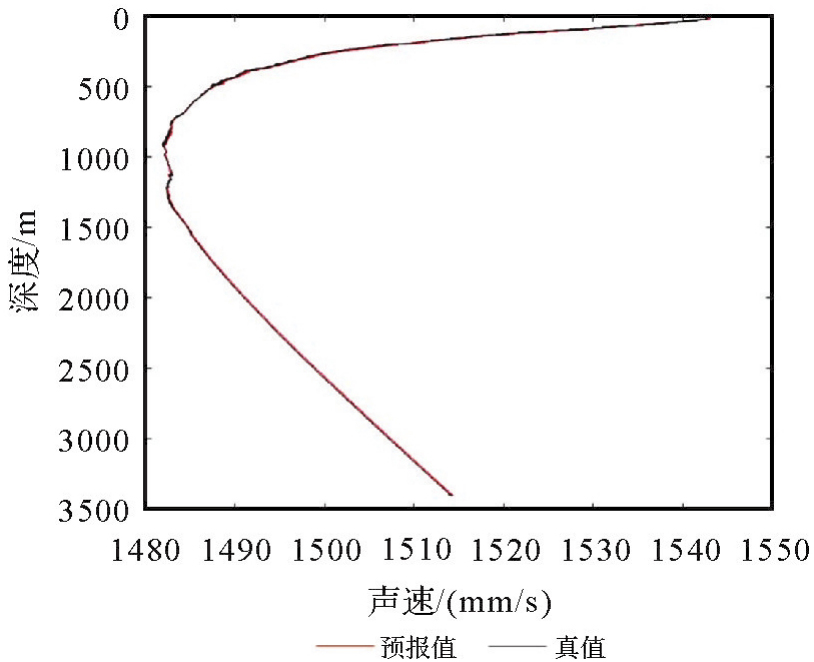
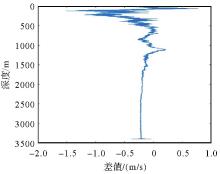
图4
SSP6差值"
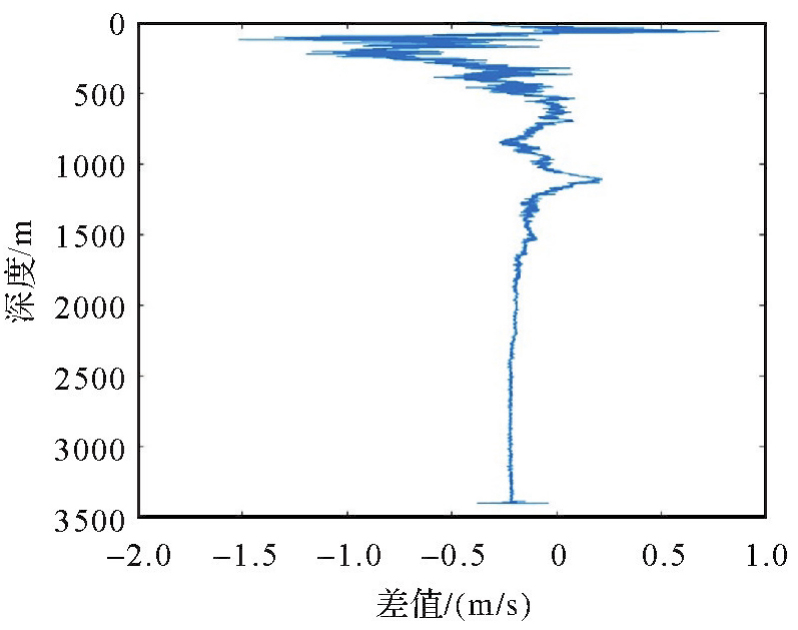
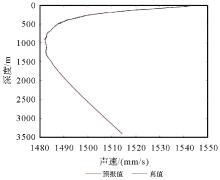
图5
SSP10预报值与真值"
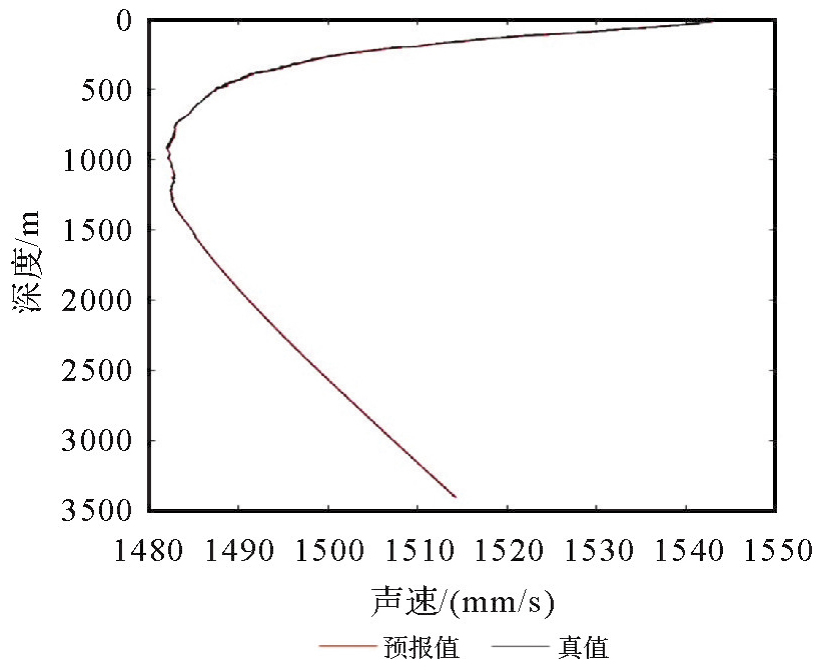
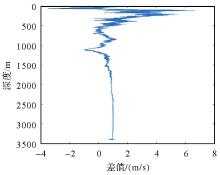
图6
SSP10差值"
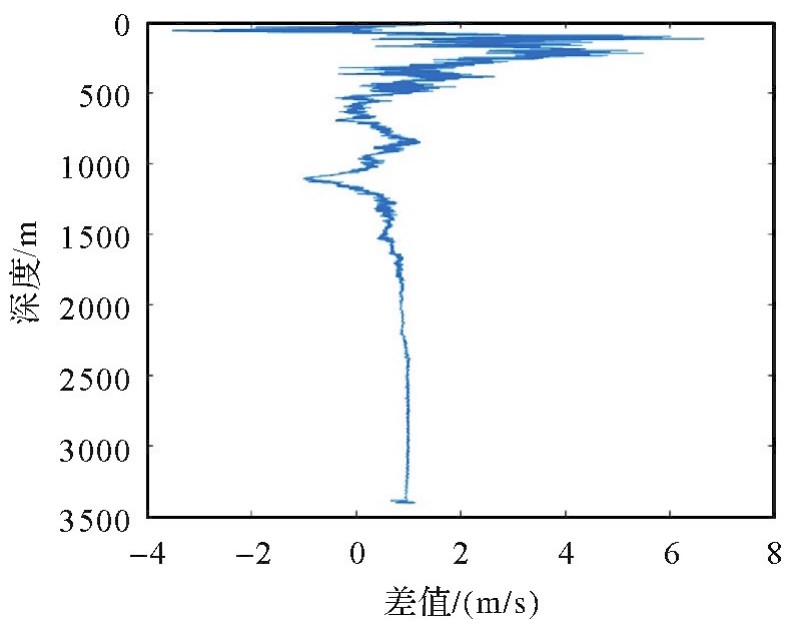
表4
样本选择情况"
| 试验 | 样本和测量时间 |
|---|---|
| 4条样本 | SSP13(04:34)、SSP10(10:16)、SSP1(15:57)、SSP12(23:59) |
| 7条样本 | SSP8(01:29)、SSP3(05:04)、SSP6(07:58)、SSP10(10:16)、SSP4(13:32)、SSP1(15:57)、SSP2(23:58) |
表5
4条样本试验结果"
| 验证样本 | RMS |
|---|---|
| SSP2 | 0.229 1 |
| SSP3 | 0.853 9 |
| SSP4 | 1.031 6 |
| SSP5 | 0.874 8 |
| SSP6 | 0.888 4 |
| SSP7 | 0.882 1 |
| SSP8 | 0.845 5 |
| SSP9 | 0.985 0 |
| SSP11 | 0.877 7 |
| 平均RMS | 0.829 8 |
表6
7条样本试验结果"
| 验证样本 | RMS |
|---|---|
| SSP5 | 0.546 8 |
| SSP7 | 0.594 2 |
| SSP9 | 0.776 4 |
| SSP11 | 0.558 3 |
| SSP12 | 1.165 3 |
| SSP13 | 0.411 6 |
| 平均RMS | 0.675 4 |
表7
3阶多项式拟合结果"
| 声速剖面 | RMS |
|---|---|
| SSP1 | 0.351 0 |
| SSP2 | 1.061 1 |
| SSP3 | 0.921 2 |
| SSP4 | 0.285 1 |
| SSP5 | 0.526 4 |
| SSP6 | 1.110 9 |
| SSP7 | 0.785 9 |
| SSP8 | 0.358 8 |
| SSP9 | 0.338 3 |
| SSP10 | 0.083 |
| SSP11 | 0.063 2 |
| SSP12 | 1.095 7 |
| SSP13 | 0.989 3 |
| 平均RMS | 0.613 1 |
表8
4阶多项式拟合结果"
| 声速剖面 | RMS |
|---|---|
| SSP1 | 0.742 0 |
| SSP2 | 1.077 4 |
| SSP3 | 0.924 3 |
| SSP4 | 0.370 2 |
| SSP5 | 0.491 3 |
| SSP6 | 1.089 9 |
| SSP7 | 0.765 7 |
| SSP8 | 1.979 8 |
| SSP9 | 0.265 7 |
| SSP10 | 0.290 4 |
| SSP11 | 0.100 8 |
| SSP12 | 1.074 5 |
| SSP13 | 1.306 7 |
| 平均RMS | 0.805 4 |
图7
海底基准点1标定航迹"
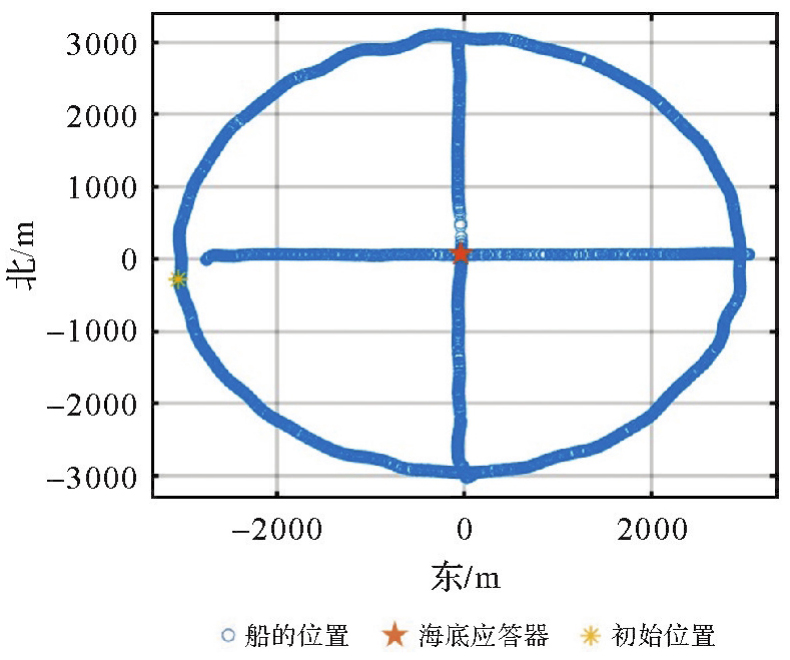
图8
海底基准点2标定航迹"
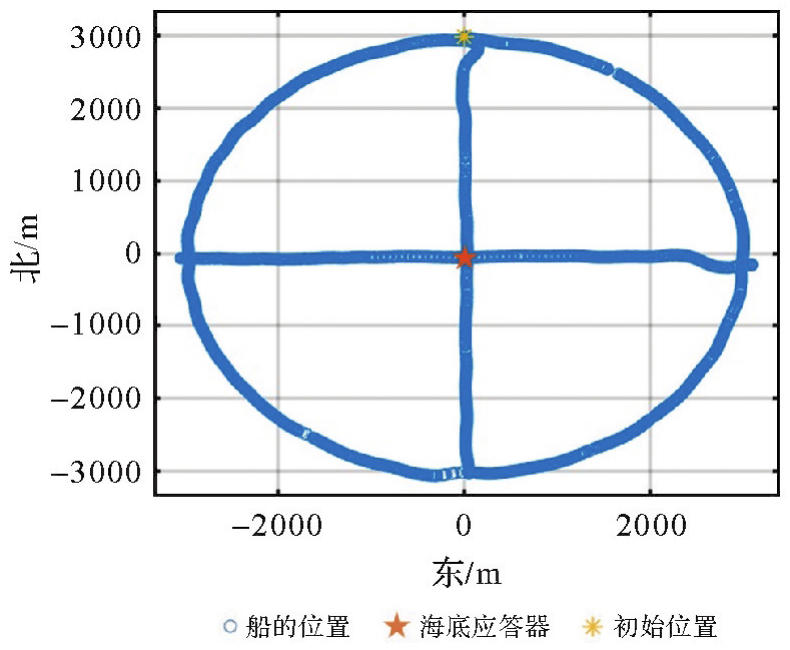
表9
标定数据时段及SSP预测时间"
| 测段 | SSP预测时间 | |
|---|---|---|
| 基准点1 | 15:30-18:40 18:50-19:50 20:40-21:50 | 15:45、16:15、17:15、17:45、18:15、18:45、19:00、19:30、21:00、21:30 |
| 基准点2 | 9:20-13:45 14:35-15:40 | 9:30、10:00、10:30、11:00、11:30、12:00、12:30、13:00、13:30、15:00、15:30 |
表10
标定结果"
| 测站 | 方法 | X/m | Y/m | Z/m | ΔX/m | ΔY/m | ΔZ/m | Sigma-X | Sigma-Y | Sigma-Z |
|---|---|---|---|---|---|---|---|---|---|---|
| 测站1 | 声线跟踪 | -2 674 347.480 | 5 417 451.158 | 2 026 714.051 | — | — | 0.017 | 0.017 | 0.009 | |
| 加权平均声速A | -2 674 346.939 | 5 417 449.993 | 2 026 713.370 | -0.541 | 1.165 | 0.681 | 0.015 | 0.017 | 0.007 | |
| 加权平均声速B | -2 674 347.607 | 5 417 450.634 | 2 026 713.551 | 0.127 | 0.524 | 0.499 | 0.015 | 0.017 | 0.007 | |
| 测站2 | 声线跟踪 | -2 675 608.492 | 5 414 476.353 | 2 033 908.222 | — | — | 0.023 | 0.023 | 0.013 | |
| 加权平均声速A | -2 675 607.774 | 5 414 475.005 | 2 033 907.718 | -0.718 | 1.348 | 0.504 | 0.024 | 0.023 | 0.011 | |
| 加权平均声速B | -2 675 608.668 | 5 414 476.631 | 2 033 908.203 | 0.176 | -0.277 | 0.019 | 0.040 | 0.038 | 0.019 |
表11
二维和三维标定精度"
| 测站 | 方法 | 2D坐标差 | 提升/(%) | 3D坐标差 | 提升/(%) | 2D-Sigma | 3D-Sigma |
|---|---|---|---|---|---|---|---|
| 测站1 | 加权平均声速A | 0.908 | — | 0.839 | — | 0.017 | 0.015 |
| 加权平均声速B | 0.381 | 58 | 0.424 | 49.5 | 0.016 | 0.014 | |
| 测站2 | 加权平均声速A | 1.080 | — | 0.928 | — | 0.024 | 0.020 |
| 加权平均声速B | 0.232 | 78.5 | 0.190 | 79.5 | 0.039 | 0.034 |
表12
圆航迹和十字航迹标定互差"
| 测站 | 方法 | 2D标定互差 | 提升/(%) | 3D标定互差 | 提升/(%) |
|---|---|---|---|---|---|
| 测站1 | 加权平均声速A | 0.629 | — | 0.839 | — |
| 加权平均声速B | 0.363 | 42.2 | 0.364 | 56.6 | |
| 测站2 | 加权平均声速A | 0.804 | — | 0.847 | — |
| 加权平均声速B | 0.658 | 18.1 | 0.667 | 21.3 |
| [1] | 刘经南, 陈冠旭, 赵建虎, 等. 海洋时空基准网的进展与趋势[J]. 武汉大学学报(信息科学版), 2019, 44(1): 17-37. |
| LIU Jingnan, CHEN Guanxu, ZHAO Jianhu, et al. Development and trends of marine space-time frame network[J]. Geomatics and Information Science of Wuhan University, 2019, 44(1): 17-37. | |
| [2] | 孙大军, 郑翠娥. 水声导航、定位技术发展趋势探讨[J]. 海洋技术, 2015(3): 64-68. |
| SUN Dajun, ZHENG Cuie. Study on the development trend of underwater acoustic navigation and positioning technologies[J]. Ocean Technology, 2015(3): 64-68. | |
| [3] |
党亚民, 蒋涛, 杨元喜, 等. 中国大地测量研究进展(2019—2023)[J]. 测绘学报, 2023, 52(9): 1419-1436. DOI: .
doi: 10.11947/j.AGCS.2023.20230343 |
|
DANG Yamin, JIANG Tao, YANG Yuanxi, et al. Research progress of geodesy in China (2019—2023)[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(9): 1419-1436. DOI: .
doi: 10.11947/j.AGCS.2023.20230343 |
|
| [4] |
杨元喜, 徐天河, 薛树强. 我国海洋大地测量基准与海洋导航技术研究进展与展望[J]. 测绘学报, 2017, 46(1): 1-8. DOI: .
doi: 10.11947/j.AGCS.2017.20160519 |
|
YANG Yuanxi, XU Tianhe, XUE Shuqiang. Progresses and prospects in developing marine geodetic datum and marine navigation of China[J]. Acta Geodetica et Cartographica Sinica, 2017, 46(1): 1-8. DOI: .
doi: 10.11947/j.AGCS.2017.20160519 |
|
| [5] | 吴永亭. LBL精密定位理论方法研究及软件系统研制[D]. 武汉: 武汉大学, 2013. |
| WU Yongting. Study on theory and method of precise LBL positioning and development of positioning software system[D]. Wuhan: Wuhan University, 2013. | |
| [6] | 郭颖. 长基线导航优化算法研究与软件实现[D]. 哈尔滨: 哈尔滨工程大学, 2019. |
| GUO Ying. Research and software implementation of long baseline navigation optimization algorithm[D]. Harbin: Harbin Engineering University, 2019. | |
| [7] | 桑金. 水深测量中的声速改正问题研究[J]. 海洋测绘, 2006, 26(3): 17-20. |
| SANG Jin. Sound velocity correction and depth reduction in sounding[J]. Hydrographic Surveying and Charting, 2006, 26(3): 17-20. | |
| [8] | WANG Junting, XU Tianhe, LIU Yangfan, et al. Kalman filter based acoustic positioning of deep seafloor datum point with two-step systematic error estimation[J]. Applied Ocean Research, 2021, 114: 102817. |
| [9] | 刘杨范. 水声定位中声速改正算法研究[D]. 青岛: 中国石油大学(华东), 2020. |
| LIU Yangfan. Research on sound speed correction algorithm in underwater acoustic positioning[D]. Qingdao: China University of Petroleum (East China), 2020. | |
| [10] | CHEN H H. Travel-time approximation of acoustic ranging in GPS/acoustic seafloor geodesy[J]. Ocean Engineering, 2014, 84: 133-144. |
| [11] | LI Zhao, DOSSO S E, SUN Dajun. Joint inversion for transponder localization and sound-speed profile temporal variation in high-precision acoustic surveys[J]. The Journal of the Acoustical Society of America, 2016, 140(1): EL44-EL49. |
| [12] | 王君婷. 海洋精密声学数据处理理论与方法研究[D]. 威海: 山东大学, 2023. |
| WANG Junting. Research on theory and method of marine precise acoustic data processing[D]. Weihai: Shandong University, 2023. | |
| [13] | 周士弘, 张茂有, 周日鹏. 海洋声速场的经验正交函数描述及声速剖面预报[J]. 海洋通报, 1999, 18(5): 27-34. |
| ZHOU Shihong, ZHANG Maoyou, ZHOU Ripeng. Study on empirical orthogonal functions expression and prediction of the sound speed field[J]. Marine Science Bulletin, 1999, 18(5): 27-34. | |
| [14] | 艾锐峰, 程杰, 欧阳军, 等. 海区声速剖面的现场反演方法[J]. 计算机应用, 2015, 35(): 327-330, 338. |
| AI Ruifeng, CHENG Jie, OUYANG Jun, et al. On-line retrieval methodology for sound speed profile of sea area[J]. Journal of Computer Applications, 2015, 35(): 327-330, 338. | |
| [15] | HUANG Wei, LU Jiajun, LI Sijia, et al. Fast estimation of full depth sound speed profile based on partial prior information[C]//Proceedings of 2023 IEEE International Conference on Electronic Information and Communication Technology. Qingdao: IEEE, 2023: 479-484. |
| [16] | VALIZADEH M, SMILEY E, BRAKI Z A, et al. Smart spectrophotometric approach for the simultaneous determination of anti-asthma drugs in inhalation spray using least squares support vector machine and net analyte signal[J]. Optik, 2022, 258: 168816. |
| [17] | 刘靖宇. 基于支持向量机的工业物联网入侵检测研究[D]. 沈阳: 中国科学院大学(中国科学院沈阳计算技术研究所), 2021. |
| LIU Jingyu. Research on intrusion detection of industrial internet of things based on support vector machine[D]. Shenyang: University of Chinese Academy of Sciences (Shenyang Institute of Computing Technology, Chinese Academy of Sciences), 2021. | |
| [18] | IKUTA R, TADOKORO K, ANDO M, et al. A new GPS-acoustic method for measuring ocean floor crustal deformation: application to the Nankai Trough[J]. Journal of Geophysical Research: Solid Earth, 2008, 113(B2): B02401. |
| [19] | YASUDA K, TADOKORO K, TANIGUCHI S, et al. Interplate locking condition derived from seafloor geodetic observation in the shallowest subduction segment at the Central Nankai Trough, Japan[J]. Geophysical Research Letters, 2017, 44(8): 3572-3579. |
| [20] | CHEN H Y, IKUTA R, LIN C H, et al. Back-arc opening in the western end of the Okinawa trough revealed from GNSS/acoustic measurements[J]. Geophysical Research Letters, 2018, 45(1): 137-145. |
| [21] | HONSHO C, KIDO M. Comprehensive analysis of traveltime data collected through GPS-acoustic observation of seafloor crustal movements[J]. Journal of Geophysical Research: Solid Earth, 2017, 122(10): 8583-8599. |
| [22] | KIDO M. Detecting horizontal gradient of sound speed in ocean[J]. Earth, Planets and Space, 2007, 59(8): e33-e36. |
| [23] | KIDO M, OSADA Y, FUJIMOTO H. Temporal variation of sound speed in ocean: a comparison between GPS/acoustic and in situ measurements[J]. Earth, Planets and Space, 2008, 60(3): 229-234. |
| [24] | TOMITA F, KIDO M, HONSHO C, et al. Development of a kinematic GNSS-acoustic positioning method based on a state-space model[J]. Earth, Planets and Space, 2019, 71(1): 102. |
| [25] | HONSHO C, KIDO M, TOMITA F, et al. Offshore postseismic deformation of the 2011 Tohoku Earthquake revisited: application of an improved GPS-acoustic positioning method considering horizontal gradient of sound speed structure[J]. Journal of Geophysical Research: Solid Earth, 2019, 124(6): 5990-6009. |
| [26] | WANG Junting, XU Tianhe, ZHANG Bingsheng, et al. Underwater acoustic positioning based on the robust zero-difference Kalman filter[J]. Journal of Marine Science and Technology, 2021, 26(3): 734-749. |
| [27] | WANG Junting, XU Tianhe, LIU Yangfan, et al. Kalman filter based acoustic positioning of deep seafloor datum point with two-step systematic error estimation[J]. Applied Ocean Research, 2021, 114: 102817. |
| [28] | QIN Xianping, YANG Yuanxi, SUN Bijiao. The refined resilient model for underwater acoustic positioning[J]. Ocean Engineering, 2022, 266: 112795. |
| [29] | YANG Yuanxi, QIN Xianping. Resilient observation models for seafloor geodetic positioning[J]. Journal of Geodesy, 2021, 95(7): 79. |
| [30] | LI Zhenglin, HE Li, ZHANG Renhe, et al. Sound speed profile inversion using a horizontal line array in shallow water[J]. Science China Physics, Mechanics & Astronomy, 2015, 58(10): 104321. |
| [31] | 王燚, 郭伟. 基于最小二乘SVM的混沌跳频通信码预测方法[J]. 电子测量与仪器学报, 2007, 21(5): 64-68. |
| WANG Yi, GUO Wei. Chaotic-FH code prediction method based on LS-SVM[J]. Journal of Electronic Measurement and Instrumentation, 2007, 21(5): 64-68. | |
| [32] | 舒建旭. 高精度海底基准点标定与长基线水声导航算法研究[D]. 西安: 长安大学, 2023. |
| SHU Jianxu. Study on algorithm of precise marine geodetic datum positioning and long baseline underwater acoustic navigation[D]. Xi'an: Chang'an University, 2023. | |
| [33] |
曾安敏, 杨元喜, 明锋, 等. 海底大地基准点圆走航模式定位模型及分析[J]. 测绘学报, 2021, 50(7): 939-952. DOI: .
doi: 10.11947/j.AGCS2021.20200529 |
|
ZENG Anmin, YANG Yuanxi, MING Feng, et al. Positioning model and analysis of the sailing circle mode of seafloor geodetic datum points[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(7): 939-952. DOI: .
doi: 10.11947/j.AGCS2021.20200529 |
| [1] | 黄贤源,翟国君,隋立芬,黄谟涛,欧阳永忠,柴洪洲. LS-SVM算法中优化训练样本对测深异常值剔除的影响[J]. 测绘学报, 2011, 40(1): 22-27. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||