




近年来,受到全球气候变化[1]、人类活动干扰和自然资源开发等因素的影响,森林大火在全球范围内频繁爆发[2-4]。据国家林业和草原局(http:∥www.forestry.gov.cn)统计,近十年来我国每年都会有超过20人在森林火灾中罹难,其中森林火灾扑救一线的消防人员更是占到了伤亡人数的绝大部分。准确、高效的逃生路网规划能支持人员应急逃生决策[5-6]。而森林火灾扑救人员伤亡的重要原因之一就是林区中复杂地理环境和多变林火行为易导致森林火灾扑救人员在执行救援任务时误入险境,无法及时判断出快速逃离的路径[7-8]。因此如何设计考虑危险环境和安全地带等森林火灾逃生关键空间信息,并规避动态林火蔓延区域的逃生路网,对辅助扑救人员安全逃生具有十分重要的作用。
随着大数据时代的到来,测绘正经历由数字化向智能化的创新转型[9]。如何有效运用最新信息技术,结合地理信息系统和地理分析技术,以高效地探索和应用时空数据,已成为智能化测绘领域迫切需要解决的问题[10]。当前已有不少学者深入探究知识引导、“知识+数据”双重驱动等技术,并结合相关算法,开展场景表达[11]、灾害数据监测[12]、遥感影像解译与识别[13-14]等研究,以挖掘相关地理知识。而影响森林火灾逃生规划因素众多,涉及不同类型时空数据,同时森林火灾逃生空间信息来源复杂,且当前并没有相关研究系统梳理森林火灾逃生方面的知识,缺少描述森林火灾逃生过程知识的研究。地理知识图谱能够实现信息高效智能提取,进而提升地理知识发现与思维拓展能力,已被广泛应用于地理环境监测、灾害防治与应急救援、旅游等方面[15-16]。在现有的森林火灾逃生路径规划相关研究中,一部分学者通过研究森林火灾蔓延特征,对人员伤亡分布特征及原因进行分析,给出紧急避险和顺利逃生的建议[17-18],但未系统梳理如山沟地带、草塘沟等森林火灾逃生关键空间信息及其特点,并给出具体的逃生路径,实际应用时存在局限性和准确性差的问题。另有学者研究林火交界域人群的区域应急救援与安全疏散逃生问题,考虑人群行为的矢量疏散路网模型[19-20]和实时规避林火蔓延区域的逃生路线[21],未重点考虑动态林火环境中扑救人员的应急逃生和林区内关键逃生信息对逃生路线准确性的影响,不适用于复杂林区连续式空间的开放越野环境[22-23]。文献[24]提出静态森林火灾逃生路径网络模型,难以适应动态环境,且未考虑逃生关键空间信息对逃生路网准确性的影响。基于栅格网络模型的最优路径规划在无路网信息的复杂三维空间环境中,有较广泛应用[25-27]。其中,针对森林区域等野外环境的全局栅格网络模型路径规划研究中,已有学者研究车辆和机器人、行人在三维地表环境中的最短路径规划方法[28-31]。该部分研究旨在分析地理影响因素,设计路径搜索算法代价函数或改进搜索效率,却均未分析关键空间信息对路径规划准确性的影响。
目前已有的林火蔓延行为模型研究中,空间模拟模型是在传统蔓延模型测算火头的蔓延方向和速度基础上,利用适当的传播方程,推算其他方向的火蔓延速度,从而形成全向林火蔓延速度和蔓延空间分布形状的时间序列数据[32],因此林火空间蔓延模拟模型可以用于动态更新和可视化林火蔓延区域,支持逃生路网动态更新研究。
综上,针对现有的森林火灾逃生路径规划方法动态适应性弱、未系统考虑山脊地带、山谷地带等逃生关键信息,导致无法支持复杂多变林火环境下扑救人员安全逃生的问题,本文在已有林火蔓延模型的基础上,将知识图谱技术与逃生关键空间信息相结合,开展知识引导的森林火灾逃生路网动态生成方法研究,建立森林火灾逃生路网规划知识图谱,形成森林火灾逃生关键空间信息智能提取技术,构建森林火灾逃生路网通行栅格网络模型。在知识图谱引导下实现森林火灾逃生关键空间信息的提取,并基于此,设计林火蔓延模拟场景下逃生路网动态优化生成算法,研发原型系统并开展案例试验分析。
1 总体研究思路
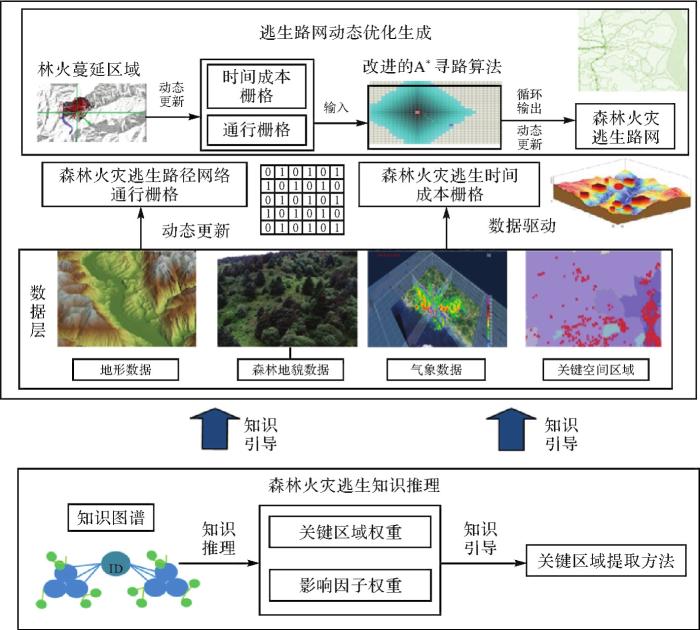
知识引导的森林火灾逃生路网动态生成方法总体研究思路如图1所示。首先,系统梳理森林火灾领域知识概念,建立相关知识图谱,并在其引导下设计规则库,进而实现森林火灾逃生关键空间信息的高效精准提取;然后,针对林火场景复杂多变导致逃生路径规划准确性与安全性差的问题,在关键空间信息约束下,创建森林火灾逃生通行栅格网络模型与逃生时间成本栅格网络模型;最后,通过动态更新林火蔓延区域,设计改进A*算法的逃生路网动态优化生成算法,最终实现逃生路网的动态优化构建。
图1
2 知识引导的森林火灾逃生关键空间信息提取
2.1 森林火灾逃生路网规划知识图谱
林区环境因素和复杂林火行为相互作用影响森林火灾的蔓延过程,导致森林火灾逃生空间信息种类繁多且关联关系错综复杂。因此考虑利用知识图谱技术达成森林火灾逃生关键空间信息的高效精准提取,实现提高逃生路网安全性的目标。
知识图谱的构建步骤包括森林火灾逃生空间本体构建与森林火灾逃生路网规划知识图谱构建。首先利用“七步法”[33]本体构建技术对森林火灾场景对象进行了自上而下的划分,统一描述其概念与类别间的语义关系,用于指导知识图谱的构建。利用OWL本体描述语言,将森林火灾逃生空间本体结构定义为一个三元组,如式(1)所示
然后,以森林火灾扑救标准与规范、森林火灾应急救援方案、林火蔓延相关原理与特征、林区地理环境数据等为数据来源,经过实体与属性关系抽取、实体关联构建等步骤后,利用Neo4j,即知识图谱存储与可视化工具,进行节点的存储与森林火灾逃生路网规划知识图谱的可视化构建(图2)。
图2
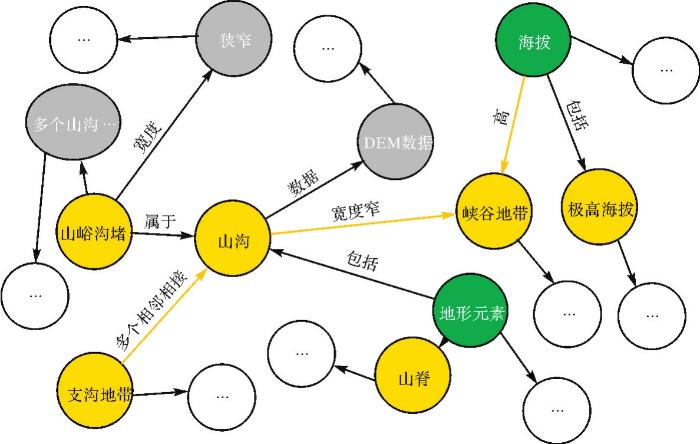
图2
森林火灾逃生路网规划知识图谱(部分)
Fig.2
Forest fire escape road network planning knowledge map (part)
2.2 森林火灾逃生关键空间信息智能提取
本文的森林火灾逃生关键空间信息定义为:森林火灾发生时,影响人员逃生安全的关键林区空间信息。使用Cypher语言查询和操作森林火灾逃生路网规划知识图谱,通过节点关系匹配的方法,得到森林火灾关键空间区域对象的特征,并基于此构建提取关键空间区域的规则库,最终形成了森林火灾逃生关键空间信息智能提取方法(图3)。
图3
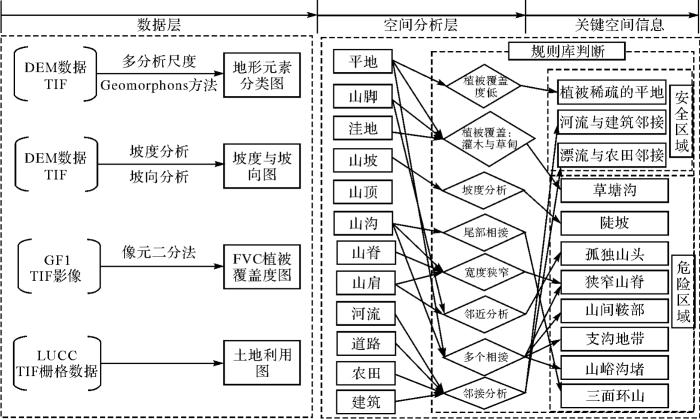
图3
森林火灾逃生关键空间信息智能提取方法
Fig.3
Intelligent extraction method of key spatial information for forest fire escape
本文首先依据森林火灾关键空间区域的地形、地貌等特征,选择相关的数据集并确定坡度坡向、FVC像元二分法、综合多分析尺度下的Geomorphons法[34]等提取方法与数据集。然后根据规则库中的空间关系约束、属性约束等规则进行空间分析。最后,提取出森林火灾逃生关键区域中的危险区和安全区。知识图谱阐明,河流和道路为安全性最高的区域,能够作为逃生路网的安全目的地。
3 森林火灾逃生路网动态优化生成
3.1 森林火灾逃生路网通行栅格网络模型
在复杂林火环境下,扑救人员逃生路径即人员位置与安全目的地之间风险最低、阻力最小的路线规划[35]。因此本文森林火灾动态逃生路网优化生成方法的目标为动态生成可通过的区域,并以最低的时间成本到达安全目的地的逃生路网。
利用包含可通行区域与不可通行区域的森林火灾逃生路网通行栅格网络模型以表示森林区域的可通行性特征。其构建流程如图4所示,首先计算不同安全等级下的阈值可通行区域,然后将各个安全等级的可通行区域与t时间内的林火蔓延区域进行叠置分析,最后输出相应安全等级的森林火灾逃生路网通行栅格。知识图谱查询信息表明,坡度和植被覆盖度对森林火灾逃生的安全性影响较大,因此将其设定为用于划分安全等级的森林火灾逃生阻力因子。对每一个逃生阻力因子设定一个最高等级的通行阈值,将其n等分为n+1个通行阈值区间。如逃生阻力因子A划分为{0,A1,A2,A3,…,An},第一个逃生可通行阈值区域为0-A1,第二个0-A2,…,第n个为0-An。依次输出每一个逃生阻力因子的逃生可通行阈值区域,并且互相叠加分析后输出重合部分,即最终有大面积相连区的阈值通行区域(图4)。当可通行阈值的下标越小,意味着在该可通行区域内的路网安全性越高,如A1B1C1安全性最高,AnBnCn安全性最低。
图4
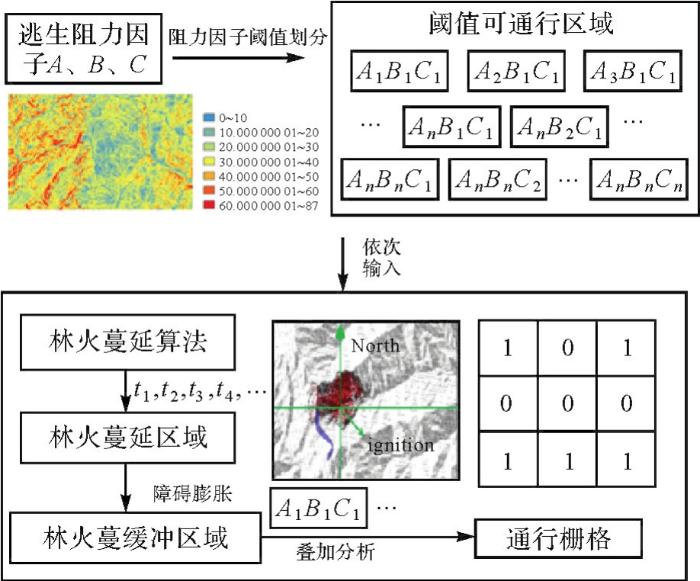
图4
森林火灾逃生路网通行栅格网络模型构建
Fig.4
Construction of forest fire escape path network passage raster network model passage raster network model
3.2 改进A*算法的逃生路网动态优化生成
采用A*算法[36]寻找以时间成本为代价的最优逃生路径。本文改进的A*算法代价函数如式(2)所示
本文采用八方向为路径搜索方向,欧几里得距离为H(n)函数的估计


 表示高度相对于步行距离的变化率;ΔS表示行走距离,该公式由Naismith规则修正得到[37];T2表示植被覆盖物摩擦额外增加的通过时间;Cf表示摩擦系数,由行人在不同地表覆盖下的行走速度得到[38],其中乔木区、灌木区、草地区的摩擦系数分别为0.96、0.89、0.81 s·m-1。
表示高度相对于步行距离的变化率;ΔS表示行走距离,该公式由Naismith规则修正得到[37];T2表示植被覆盖物摩擦额外增加的通过时间;Cf表示摩擦系数,由行人在不同地表覆盖下的行走速度得到[38],其中乔木区、灌木区、草地区的摩擦系数分别为0.96、0.89、0.81 s·m-1。
逃生路网动态优化生成算法如图5所示。首先构建不同安全程度的森林火灾逃生路网通行栅格,设置与起点直线距离最短的河流或者道路为安全目的地;然后生成起点与每一可通行安全目的地的逃生路径,输出改进A*算法的森林火灾最佳逃生路径和相应的通行时间;接着,循环全部的通行栅格,生成逃生路网;最后,根据气象数据、植被覆盖数据等数据,更新T+X时间的林火蔓延区域,判断路网是否经过T+X时间的蔓延区。若有路径通过,更新生成逃生路网。若没有,则需再判断T+X是否大于路径通行时间,若小于,则表明此逃生路径可以完全避开林火蔓延区。当逃生时间TC大于林火蔓延时间,则表明此逃生路网仍有受到林火动态变化的影响,需要重新生成。循环动态更新林火蔓延区域与逃生路网,直到路网通行时间小于林火蔓延时间,最终输出安全逃生路网。
图5
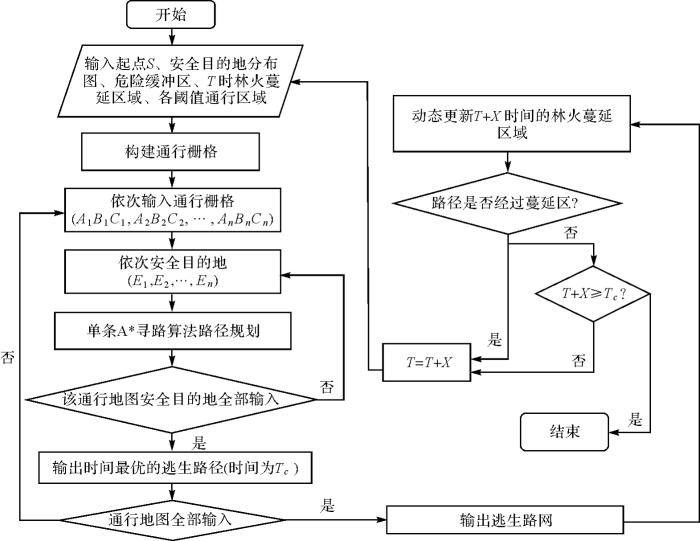
图5
改进A*算法的逃生路网动态优化生成
Fig.5
Dynamic optimal generation of escape road network with improved A* algorithm
4 试验结果与分析
4.1 试验区与数据
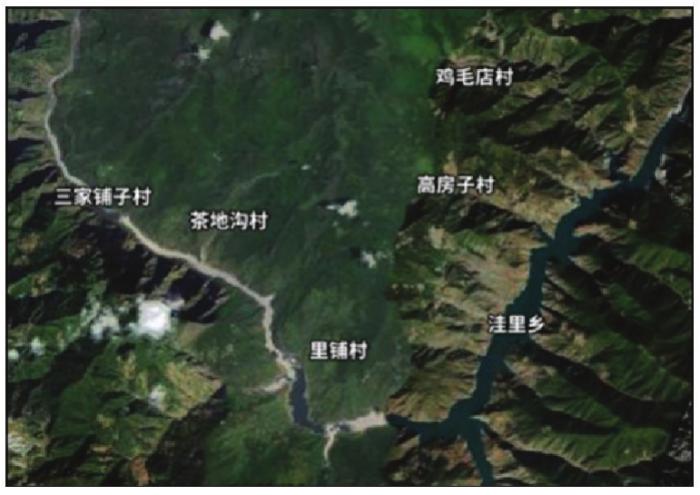
本文试验区(图6)位于中国四川省凉山彝族自治州木里县与盐源县交界处(28°10'N—28°12'N,101°20'E—101°38'E),该地为2020年“3·30木里县森林火灾”发生区,过火面积约为20万km2,遇难人数为31人[39]。该试验区面积约为600 km2,高程为1583~4445 m,茂密的森林和草地广布,中间有雅砻江与小金河穿过。试验数据包括试验区12.5 m分辨率ASTER GDEM、2020年3月30日GF1遥感影像、2020年LUCC栅格数据(http:∥www.resdc.cn),2020年3月气象数据(http:∥data.cma.cn)。数据空间坐标系统一为WGS-84坐标系,栅格数据分辨率统一为12.5 m。
图6
4.2 原型系统研发
图7
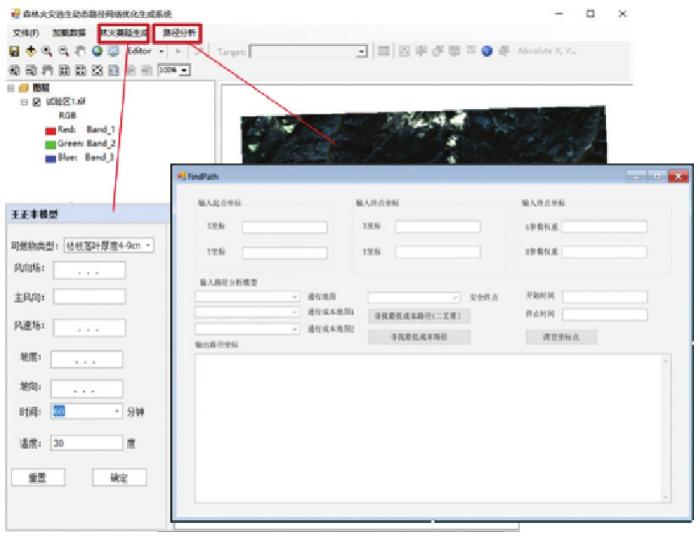
图7
森林火灾逃生路网动态优化生成系统界面
Fig.7
Interface of forest fire escape dynamic path network optimization generating system
表1 系统开发环境配置
Tab.1
| 软件设备 | 环境配置 | 详细信息 |
|---|---|---|
| 硬件 | CPU | Intel Core i5-11300H@3.10 GHz |
| 内存/GB | 16 | |
| 显卡 | GeoForce MX450 | |
| 显存/MB | 2000 | |
| 软件 | 系统 | Windows10 |
| 软件 | Visual Studio,ArcGIS |
4.3 试验结果分析
4.3.1 森林火灾逃生环境构建
图8
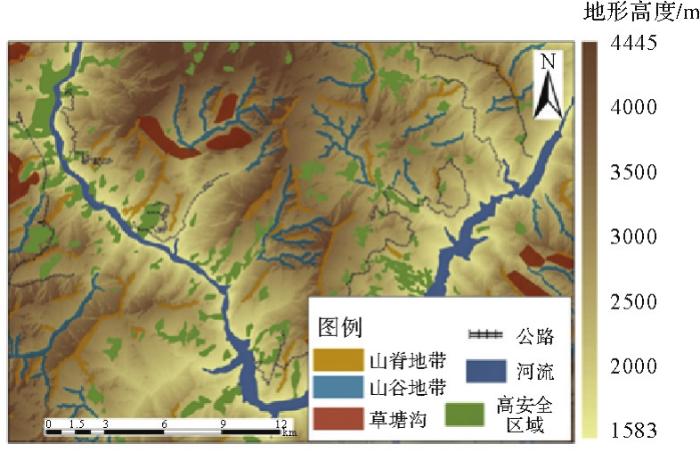
图8
森林火灾逃生关键空间区域提取结果
Fig.8
Extraction results of escape key space area for forest fire
表2 案例区逃生关键空间区域参数
Tab.2
| 关键空间区域 | 类别 | 等级 | 安全代价 |
|---|---|---|---|
| 邻河村沿河区域 | 安全目的地 | 高 | 0 |
| 植被稀疏平地 | 中等 | 0 | |
| 农田 | 高安全区域 | 中等 | 0 |
| 河流 | 高 | 0 | |
| 道路 | 高 | 0 | |
| 狭窄山脊 | 山脊地带 | 较低 | 0.33 |
| 山间鞍部 | 较低 | 0.33 | |
| 支沟地带 | 山谷地带 | 中等 | 0.5 |
| 山峪沟堵 | 中等 | 0.5 | |
| 三面环山 | 中等 | 0.5 | |
| 草塘沟 | 草塘沟 | 高 | 1 |
表3 案例区通行栅格网络模型参数
Tab.3
| 通行栅格 | 坡度/(°) | 植被覆盖度 | 安全等级 |
|---|---|---|---|
| A40B75 | 0~40 | 0~0.75 | 最高 |
| A45B80 | 0~45 | 0~0.8 | 较高 |
| A50B80 | 0~50 | 0~0.8 | 较高 |
| A55B85 | 0~55 | 0.85 | 中等 |
| A60B90 | 0~60 | 0~0.9 | 中等 |
| A65B95 | 0~65 | 0.95 | 中等 |
| A70B100 | 0~70 | 0~1 | 较低 |
| A80B100 | 0~80 | 0~1 | 较低 |
4.3.2 逃生路网的有效决策信息分析
以《森林火灾扑救技术规程》中的消防人员逃生自救守则为逃生路网有效性的评价标准,验证本文森林火灾逃生路网在应急逃生决策时的有效性。在60 min的林火模拟蔓延区域附近选择1个逃生起点S1。本文所采用林火蔓延模型的动态更新时间达分钟级。因此试验设置林火模拟蔓延区域更新时间为1 min,指定权重a为0.5,b为0.3,c为0.3。最终生成逃生路网如图9所示,其参数信息见表4。由表4可知,扑救人员可以根据扑救任务与身体情况,通过衡量逃生路径的逃生时间、空间距离、通行栅格的安全等级等参数信息,选择最佳的逃生路径。由图9可知,逃生路网均能够规避林火危险环境,说明本文方法能够实现逃生路网的动态优化生成,保证逃生路径规划的安全性。因此证明本文方法可以实现动态林火环境中规避林火环境的安全路网,可为扑救人员提供有效逃生决策信息。
图9
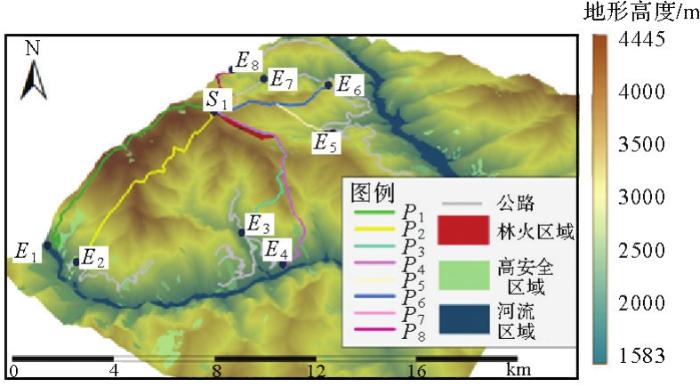
图9
森林火灾逃生路网动态优化生成
Fig.9
The results of dynamic optimization of forest fire escape road network generation
表4 动态逃生路网参数
Tab.4
| 逃生路网 | 路径 | 逃生时间/min | 模拟蔓延间/min | 空间距离/km | 通行栅格 |
|---|---|---|---|---|---|
| NR1 | P1 | 110 | 110 | 14.9 | A40B75 |
| P2 | 102 | 102 | 14.6 | A45B80 | |
| P3 | 95 | 95 | 11.5 | A50B80 | |
| P4 | 88 | 88 | 10.7 | A55B85 | |
| P5 | 70 | 70 | 8.3 | A60B90 | |
| P6 | 68 | 68 | 7.9 | A65B95 | |
| P7 | 60 | 60 | 6.2 | A70B100 | |
| P8 | 58 | 58 | 5.2 | A80B100 |
4.3.3 逃生路网规划结果对比分析
3种方法的路径搜索方式、通行栅格网络模型(参数见表3)、安全目的地均参考本文方法,并在相同的安全阈值通行栅格网络中选择同一个逃生起点和安全目的地进行逃生路网的构建。以《森林火灾扑救技术规程》中的消防人员逃生自救守则为依据,选择逃生路网的逃生时间、空间距离、地形趋势、平均植被覆盖度为逃生路网的安全性评价指标,并对3种方法逃生路网可视化结果进行定性评估。
图10
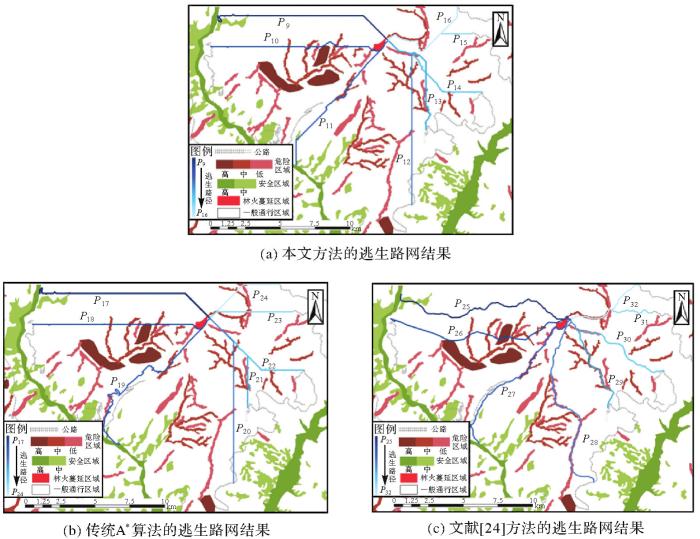
图10
各方法构建的森林火灾逃生路网结果
Fig.10
The results of the forest fire escape route network constructed by each method
图11
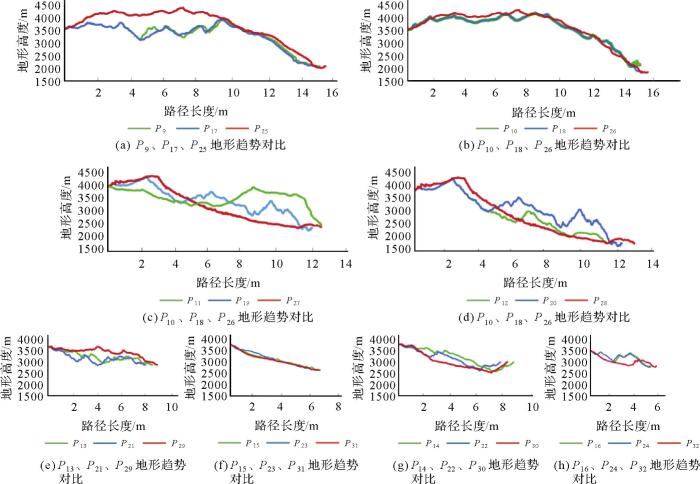
图11
各方法构建的森林火灾逃生路网地形趋势
Fig.11
A topographic trend of the forest fire escape route network constructed by each method
图11中,红色为文献[24]方法的逃生路网,蓝色为传统A*算法,绿色为本文方法。结合图10分析可知,图11(a)、(c)、(d)、(e)、(g)、(h)为山脊,山谷等危险区域较多的情况,文献[24]方法的逃生路网经过危险区域的长度较长,山脊、山谷的地形起伏度较小,因此在这些情况下其逃生路网的地形趋势最平缓。而在图11(b)、(f)等危险区域分布较少时,3种方法的地形趋势相似。
表5 各方法构建的森林火灾逃生路网参数
Tab.5
| 方法 | 逃生路网 | 路径 | 逃生时间/min | 空间距离/km | 平均植被覆盖度 | 通行栅格 |
|---|---|---|---|---|---|---|
| 本文方法 | NR2 | P9 | 120 | 15.4 | 0.638 | A40B75 |
| P10 | 105 | 14.8 | 0.672 | A45B80 | ||
| P11 | 100 | 12.5 | 0.710 | A50B80 | ||
| P12 | 92 | 11.3 | 0.720 | A55B85 | ||
| P13 | 78 | 8.9 | 0.624 | A60B90 | ||
| P14 | 78 | 8.7 | 0.631 | A65B95 | ||
| P15 | 58 | 6.7 | 0.700 | A70B100 | ||
| P16 | 55 | 5.6 | 0.686 | A80B100 | ||
| 传统A*算法 | NR3 | P17 | 120 | 15.3 | 0.638 | A40B75 |
| P18 | 106 | 15.1 | 0.672 | A45B80 | ||
| P19 | 105 | 13.1 | 0.714 | A50B80 | ||
| P20 | 87 | 12.1 | 0.720 | A55B85 | ||
| P21 | 70 | 8.1 | 0.624 | A60B90 | ||
| P22 | 71 | 7.9 | 0.631 | A65B95 | ||
| P23 | 59 | 6.7 | 0.700 | A70B100 | ||
| P24 | 57 | 5.6 | 0.686 | A80B100 | ||
| 文献[24] | NR4 | P25 | 130 | 15.7 | 0.651 | A40B75 |
| P26 | 133 | 15.8 | 0.682 | A45B80 | ||
| P27 | 110 | 13.8 | 0.713 | A50B80 | ||
| P28 | 95 | 12.7 | 0.720 | A55B85 | ||
| P29 | 78 | 9.1 | 0.632 | A60B90 | ||
| P30 | 74 | 8.3 | 0.635 | A65B95 | ||
| P31 | 60 | 6.7 | 0.712 | A70B100 | ||
| P32 | 59 | 6.0 | 0.710 | A80B100 |
表6 各方法构建的森林火灾逃生路网的LoR
Tab.6
| 方法 | 逃生路网 | LoR(危险区域) | LoR(安全区域) | LoR(一般通行区域) |
|---|---|---|---|---|
| 本文方法 | NR2 | 6.4 | 8.60 | 85.00 |
| 传统A*算法 | NR3 | 8.21 | 3.66 | 88.13 |
| 文献[24]方法 | NR4 | 33.79 | 5.54 | 60.67 |
5 结论与展望
本文提出了一种知识引导的森林火灾逃生路网动态生成方法,通过构建森林火灾逃生路网规划知识图谱,形成森林火灾关键逃生空间信息智能提取方法;创建森林火灾逃生路网通行栅格网络模型,设计改进A*算法的森林火灾逃生路网动态优化生成方法。选取森林火灾频发区域作为试验区,并研发原型系统。试验结果证明本文方法实现了动态逃生路网规划,支持为扑救人员提供有效逃生决策信息。与现有方法相比,提高了逃生路网的准确性。因此,本文方法可以提供一种改进的知识表示和推理方法,推动智能化测绘技术在森林火灾应急管理领域的融合与创新,拓展智能化测绘的应用场景。
本文研究森林火灾逃生路网动态生成方法时,主要聚焦地理知识图谱与逃生关键空间信息等空间信息领域智能化技术的引入与创新应用,以支撑建立森林火灾逃生路网通行栅格网络模型,没有重点研究林火蔓延行为模型,而是基于已有相关成果,将其计算结果作为一个输入条件,包括风向等关键因素。实际上,由于灾害现场情况非常复杂,本文使用林火蔓延行为模型计算结果的准确性有待提升,未来将借助智能化测绘实时数据处理能力,充分协同利用气象、地形、林分因子、人类活动、火点监测等多源异构数据,深入研究动态数据驱动的林火蔓延趋势分析技术,通过实时监测数据不断调整与改善数值模型,提升火灾范围预测精度。
参考文献
Remote sensing and forest carbon monitoring—a review of recent progress, challenges and opportunities
[J].
Human exposure and sensitivity to globally extreme wildfire events
[J].
林火风险、过程与评估遥感模型与方法研究
[J].
Study on the risk, spread and assessment of forest fire based on the model and remote sensing
[J].
1950—2010年中国森林火灾时空特征及风险分析
[J].
Temporal and spatial characteristics and risk analysis of forest fires in China from 1950 to 2010
[J].
一种多出口室内应急疏散路径规划算法
[J].
An algorithm for route planning applied in multi-exit indoor emergency evacuation
[J].
实时威胁态势感知的室内火灾疏散路径动态优化方法
[J].
A dynamic optimization method of indoor fire evacuation route based on realtime situation awareness
[J].
An interdisciplinary agent-based multimodal wildfire evacuation model: critical decisions and life safety
[J].
森林火灾导致人员伤亡的原因剖析及应对措施
[J].
Analysis of the causes of casualties caused by forest fires and the associated countermeasures
[J].
智能化测绘的混合计算范式与方法研究
[J/OL].
Hybrid computational paradigm and methods for intelligentized surveying and mapping
[J/OL].
时空大数据时代的地理知识工程展望
[J].
Prospect of geo-knowledge engineering in the era of spatio-temporal big data
[J].
知识引导的滑坡灾害场景动态表达方法
[J].
Knowledge-guided dynamic representation method of landslide disaster scene
[J].
知识引导的滑坡监测数据粗差定位与剔除方法
[J].
Knowledge-guided gross errors detection and elimination approach of landslide monitoring data
[J].
地学知识图谱引导的遥感影像语义分割
[J].
Geographic knowledge graph-guided remote sensing image semantic segmentation
[J].
遥感影像智能解译样本库现状与研究
[J].
Status analysis and research of sample database for intelligent interpretation of remote sensing image
[J].
面向多源地理空间数据的知识图谱构建
[J].
The construction of knowledge graph towards multi-source geospatial data
[J].
虚拟地理环境下的地理空间认知初步探索
[J].
Exploring the use of virtual geographic environments for geo-spatial cognition research
[J].
扑救森林火灾作战中紧急避险问题研究
[D].
Research on the problem of emergency refuge in forest fire fighting
[D].
森林灭火安全防范与紧急避险探讨
[J].
Discussion on safety precaution and emergency avoidance of forest fire fighting
[J].
Using artificial intelligence for safe and effective wildfire evacuations
[J].
Setting wildfire evacuation triggers by coupling fire and traffic simulation models: a spatiotemporal GIS approach
[J].
Examining the potential of mobile applications to assist people to escape wildfires in real-time
[J].
林区步行最优路径分析方法
[J].
Optimal walking path analysis method for forest region
[J].
基于地形数据的长距离越野路径快速规划方法研究
[J].
Fast method for long-distance off-road path planning based on terrain data
[J].
森林火灾逃生路径网络决策研究
[J].
A decision-making study about multi-escaperoute network generating in forest fire
[J].
Grid-optimized UAV indoor path planning algorithms in a complex environment
[J].
海洋自主航行器多海湾区域完全遍历路径规划
[J].
Complete coverage path planning for autonomous marine vehicle used in multi-bay areas
[J].
一种面向室内导航的通行区域模型及其自动提取算法
[J].
Traversable region model and its automatic extraction algorithm for indoor navigation
[J].
Off-road path planning based on improved ant colony algorithm
[J].
复杂山地环境下的机器人路径规划
[J].
Path planning of robots in complex terrain
[J].
Terrain based D algorithm for path planning
[J].
面向山地徒步应急救援路径规划的改进蚁群算法研究
[J].
Research on improved ant colony algorithm for mountain hiking emergency rescue path planning
[J].
林火行为蔓延模型研究进展
[J].
A review of wildland fire spread modelling
[J].
Ontology development 101: a guide to creating your first ontology
[J].
多分析尺度下综合判别的地形元素分类方法
[J].
A new method of landform element classification based on multi-scale morphology
[J].
A LiDAR-based analysis of the effects of slope, vegetation density, and ground surface roughness on travel rates for wildland firefighter escape route mapping
[J].
A formal basis for the heuristic determination of minimum cost paths
[J].
基于DEM的遗址域定量算法及可获取耕地统计
[J].
DEM based quantitative site catchment definition and statistics on retrievable farmlands
[J].
Analysis on vehicle and walking speeds of search and rescue ground crews in mountainous areas
[J].
凉山州“3·30” 林火扑救人员伤亡原因分析与启示
[J].
Analysis and enlightenment on the causes of casualties in“3·30” forest fire fighting in Liangshan prefecture
[J].
风和地形对林火蔓延速度的作用
[J].
The influence of wind and relief on the speed of the forest fire spreading
[J].
基于ArcGIS Engine林火蔓延模拟算法的比较分析
[J].
Contrastive analysis of algorithms of the forest fire spreading simulation based on ArcGIS Engine
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}