


测绘学报 ›› 2024, Vol. 53 ›› Issue (11): 2213-2227.doi: 10.11947/j.AGCS.2024.20230289
刘家兴1( ), 黄玉春1(), 石文轩1, 叶曦2, 杨鹤3
), 黄玉春1(), 石文轩1, 叶曦2, 杨鹤3
收稿日期:2023-07-16
出版日期:2024-12-13
发布日期:2024-12-13
通讯作者:
黄玉春
E-mail:liujiaxing@whu.edu.cn;hycwhu@whu.edu.cn
作者简介:第一刘家兴(1997—),男,硕士,研究方向为摄影测量与遥感。 E-mail:liujiaxing@whu.edu.cn
基金资助:
Jiaxing LIU1(), Yuchun HUANG1(), Wenxuan SHI1, Xi YE2, He YANG3
Received:2023-07-16
Online:2024-12-13
Published:2024-12-13
Contact:
Yuchun HUANG
E-mail:liujiaxing@whu.edu.cn;hycwhu@whu.edu.cn
About author:LIU Jiaxing (1997—), male, master, majors in photogrammetry and remote sensing. E-mail: liujiaxing@whu.edu.cn
Supported by:摘要:
道路标线是重要的交通标志信息,车载激光雷达点云为道路标线的提取提供了高精度的三维坐标和反射强度信息。由于扫描距离、目标材质等因素影响,不同目标会表现为相近的强度值,给道路标线的提取带来干扰;道路使用过程中的磨损老化会破坏标线原有的结构,造成标线提取后出现间断不连续问题;此外,道路标线种类多样且实际中出现的概率不同,导致分割网络提取结果中样本较少的类别分类精度较低。为此,本文提出了一种可准确提取各类标线并具有拓扑稳健性的分割+分类两阶段提取方法。首先,使用多层感知机自适应学习强度与其影响因素之间的关系,对路面点云进行强度改正;然后,提出链式空间拓扑网络LST-Net对道路上的所有标线进行语义分割,引入行列卷积、注意力机制捕捉标线结构信息,加入拓扑惩罚对其训练,确定标线的位置;最后,使用YOLOv5对标线进行检测,单独训练分类网络,解决分割中样本不均衡的问题,完成对标线的分类。在不同场景的3份车载点云上进行试验,结果表明本文方法标线提取精度达到94.1%,召回率达到95.6%,具有较强的实用性和有效性。
中图分类号:
刘家兴, 黄玉春, 石文轩, 叶曦, 杨鹤. 顾及拓扑结构的道路标线提取[J]. 测绘学报, 2024, 53(11): 2213-2227.
Jiaxing LIU, Yuchun HUANG, Wenxuan SHI, Xi YE, He YANG. Road markings extraction considering topological structure[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(11): 2213-2227.
图1
本文数据处理流程"
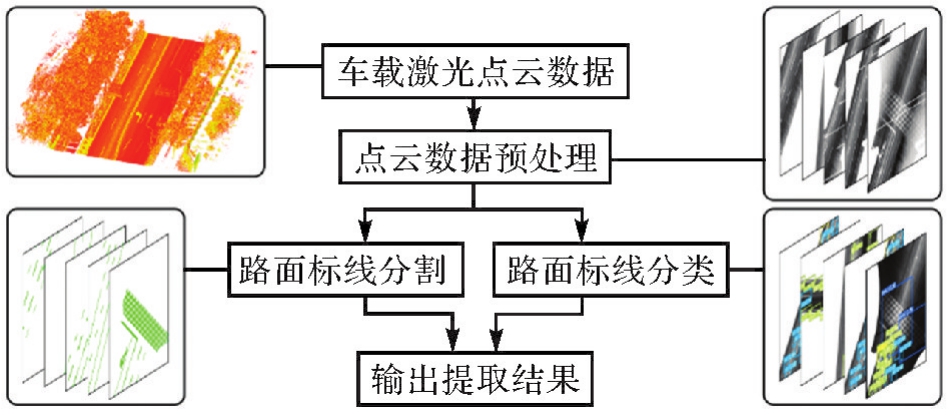

图2
强度改正网络结构"
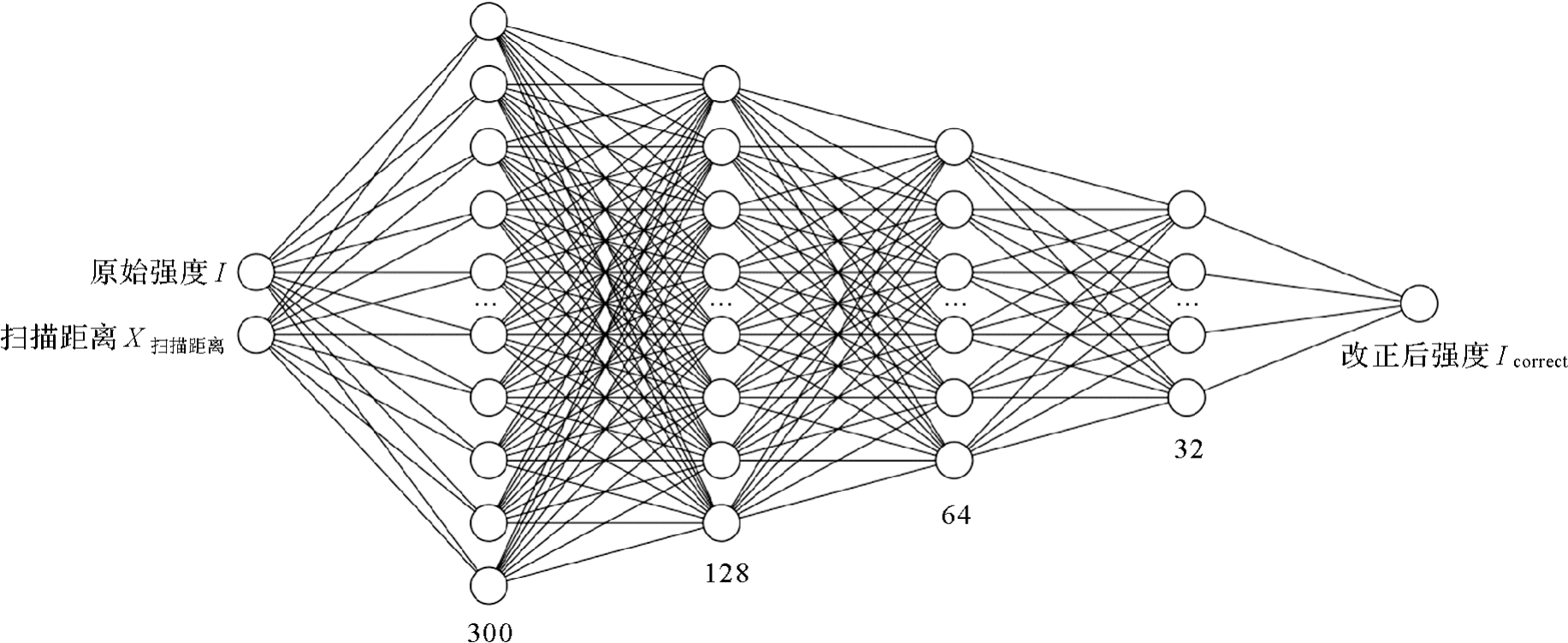
图3
LST-Net网络结构注:BEC损失为二进制交叉熵损失(binary cross entropy loss)。"
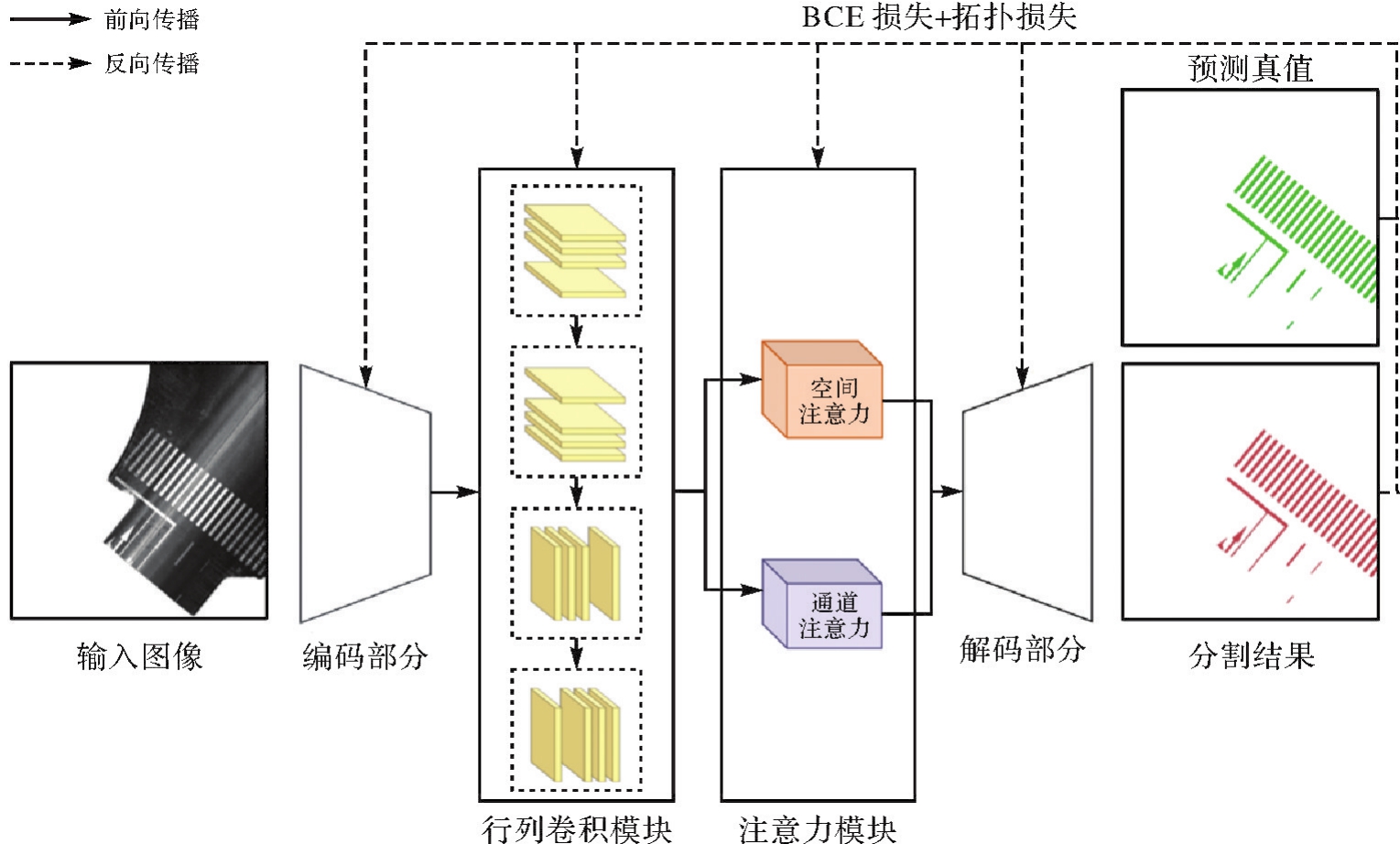
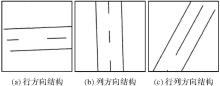
图4
道路标线行列结构示意"
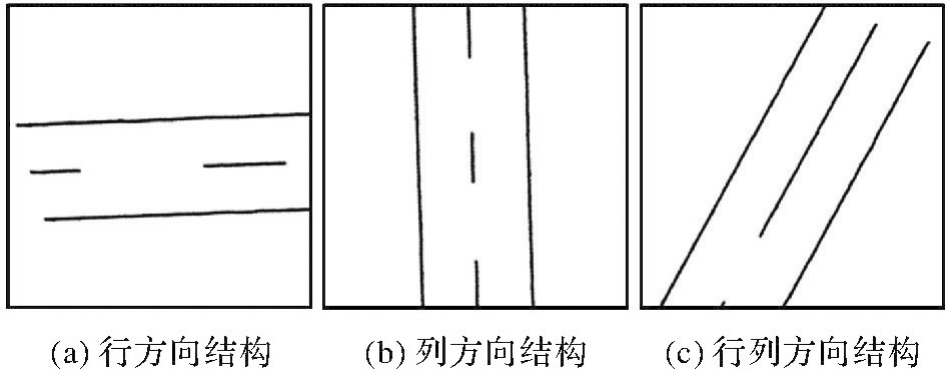

图5
行列卷积模块结构"
图6
道路标线远距离依赖示意"

图7
注意力模块结构"
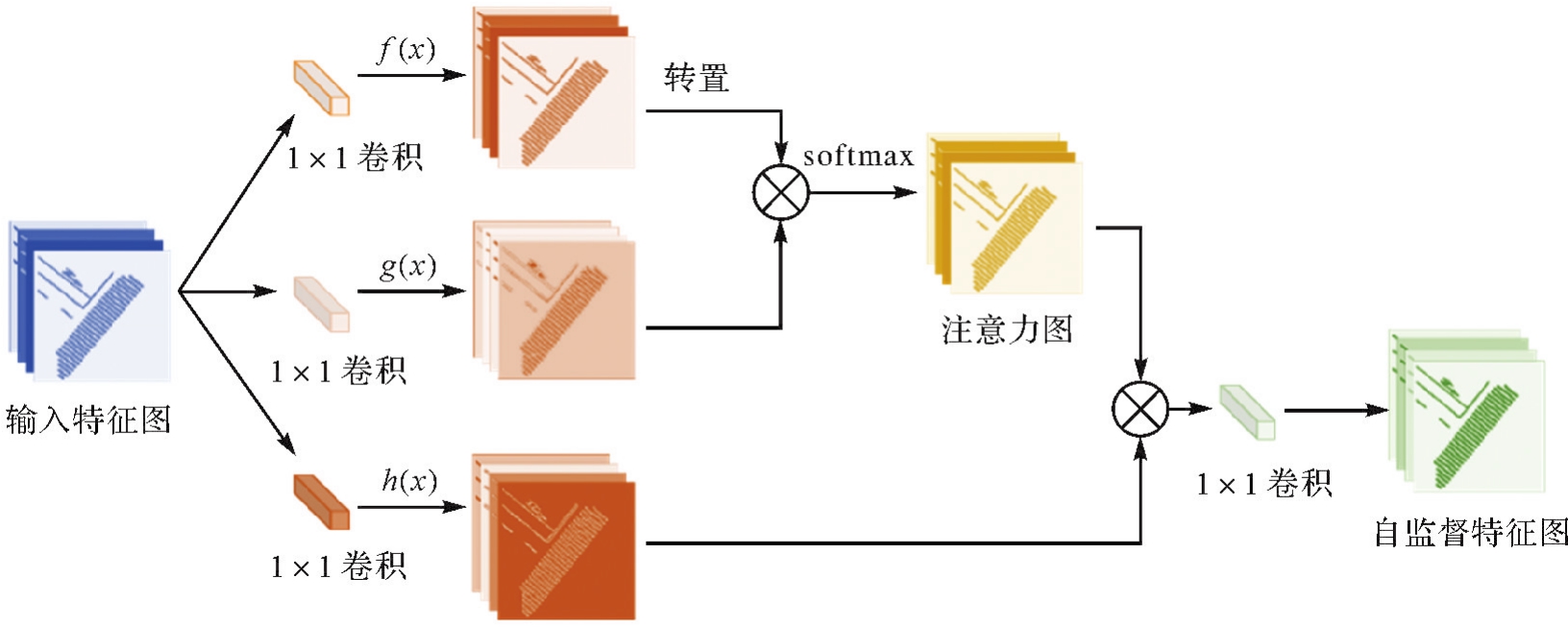
图8
道路标线拓扑结构丢失示意"

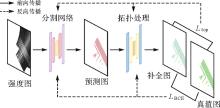
图9
本文分割网络的拓扑处理和惩罚训练流程"
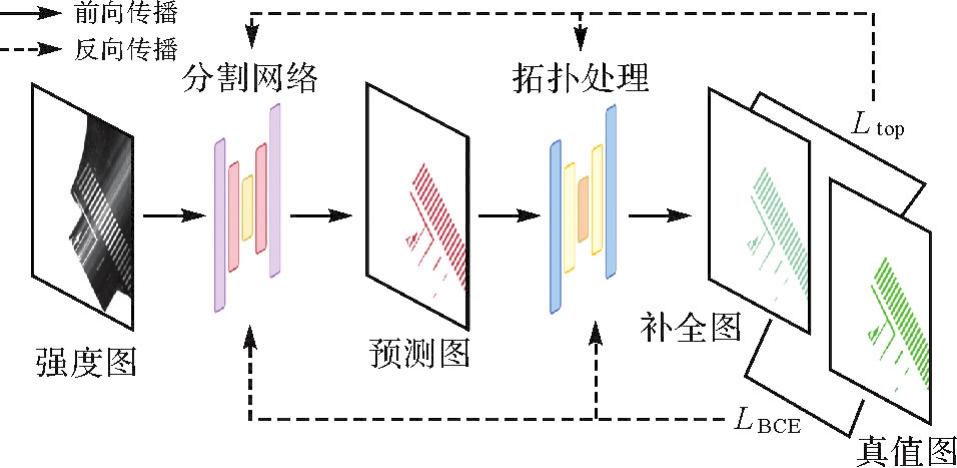

图10
拓扑处理网络补全过程示意"
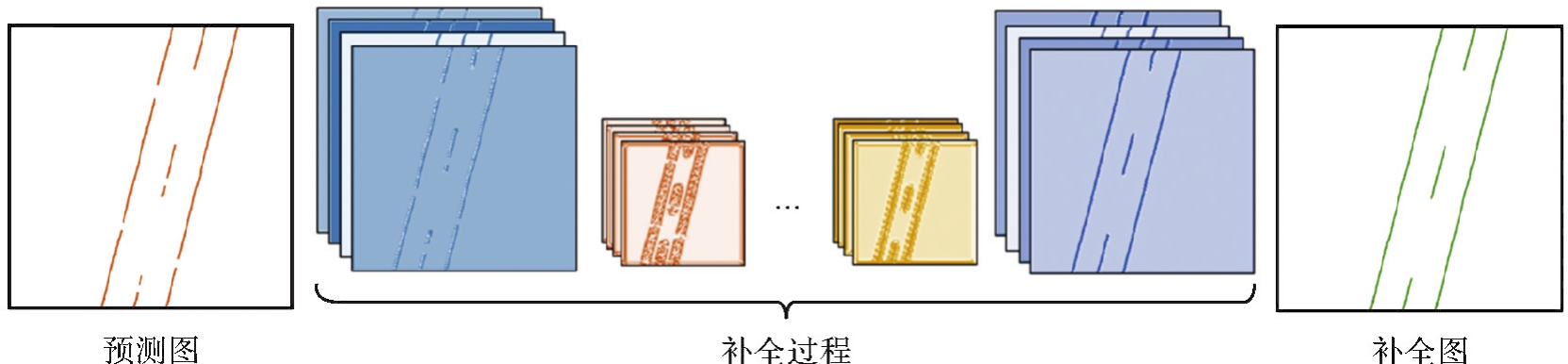

图11
本文Ltop损失函数计算示意"
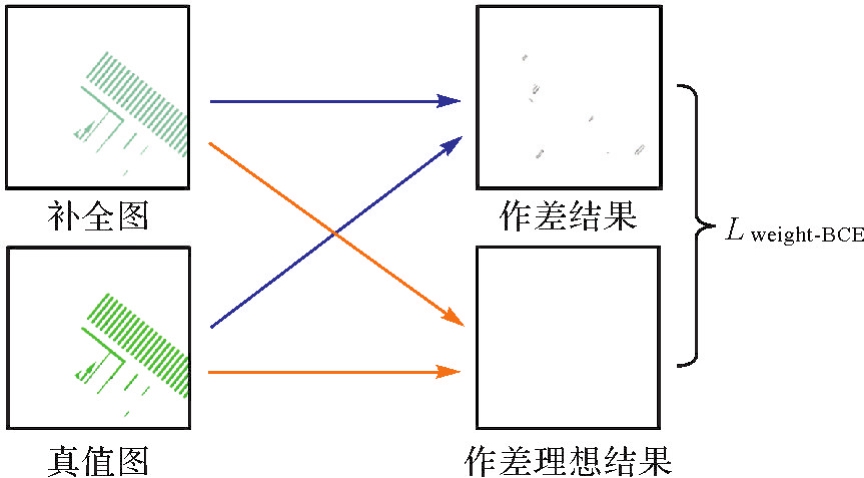
表1
试验数据集信息"
| 路段名称 | 数据总量 | 训练集 | 测试集 |
|---|---|---|---|
| 路段1 | 1856 | 1299 | 557 |
| 路段2 | 2560 | 1792 | 768 |
| 路段3 | 4800 | 3360 | 1440 |

图12
本文方法道路标线提取试验结果示例"
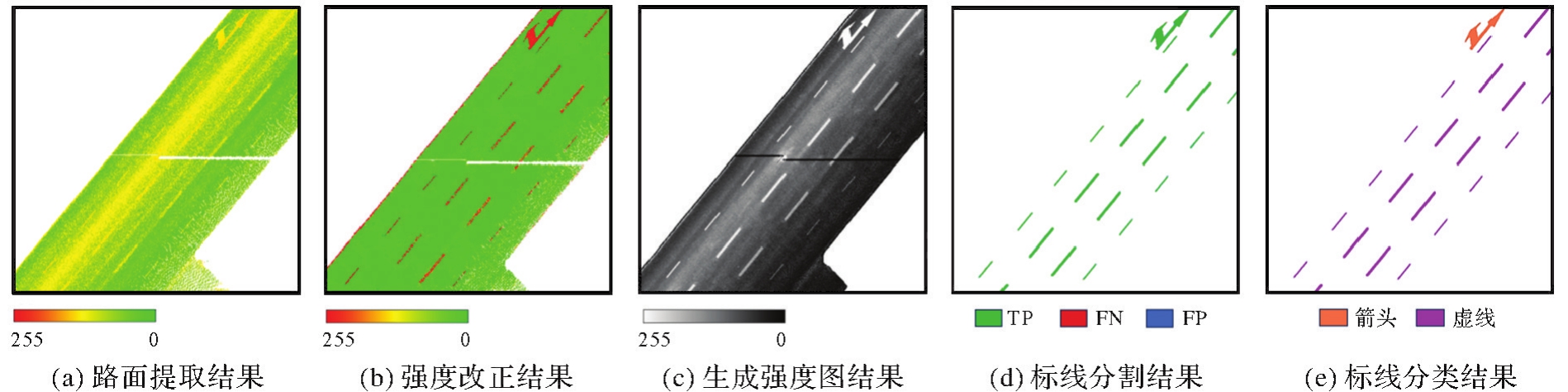

图13
本文方法道路标线提取结果"
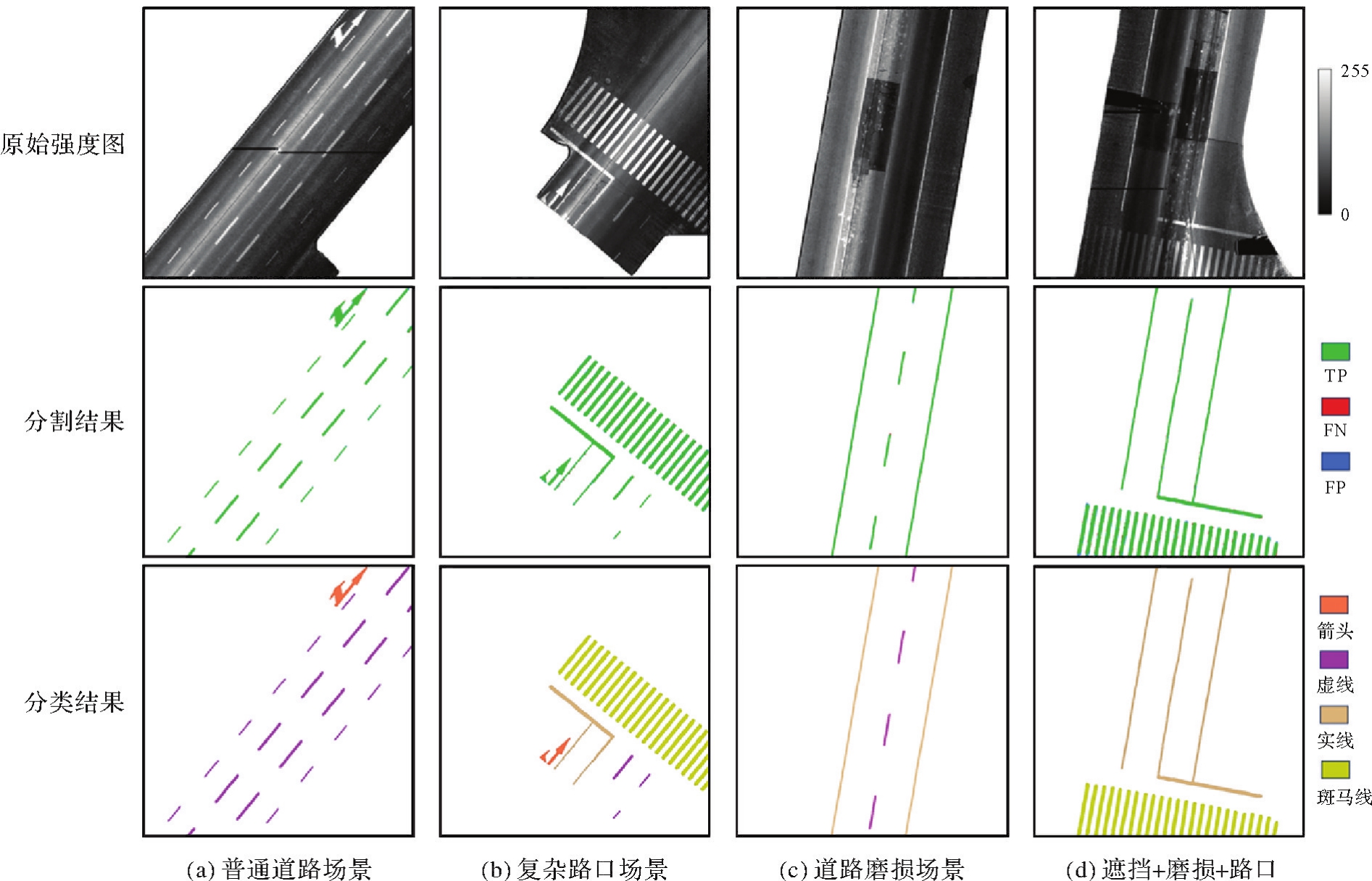
图14
强度改正前后效果对比"
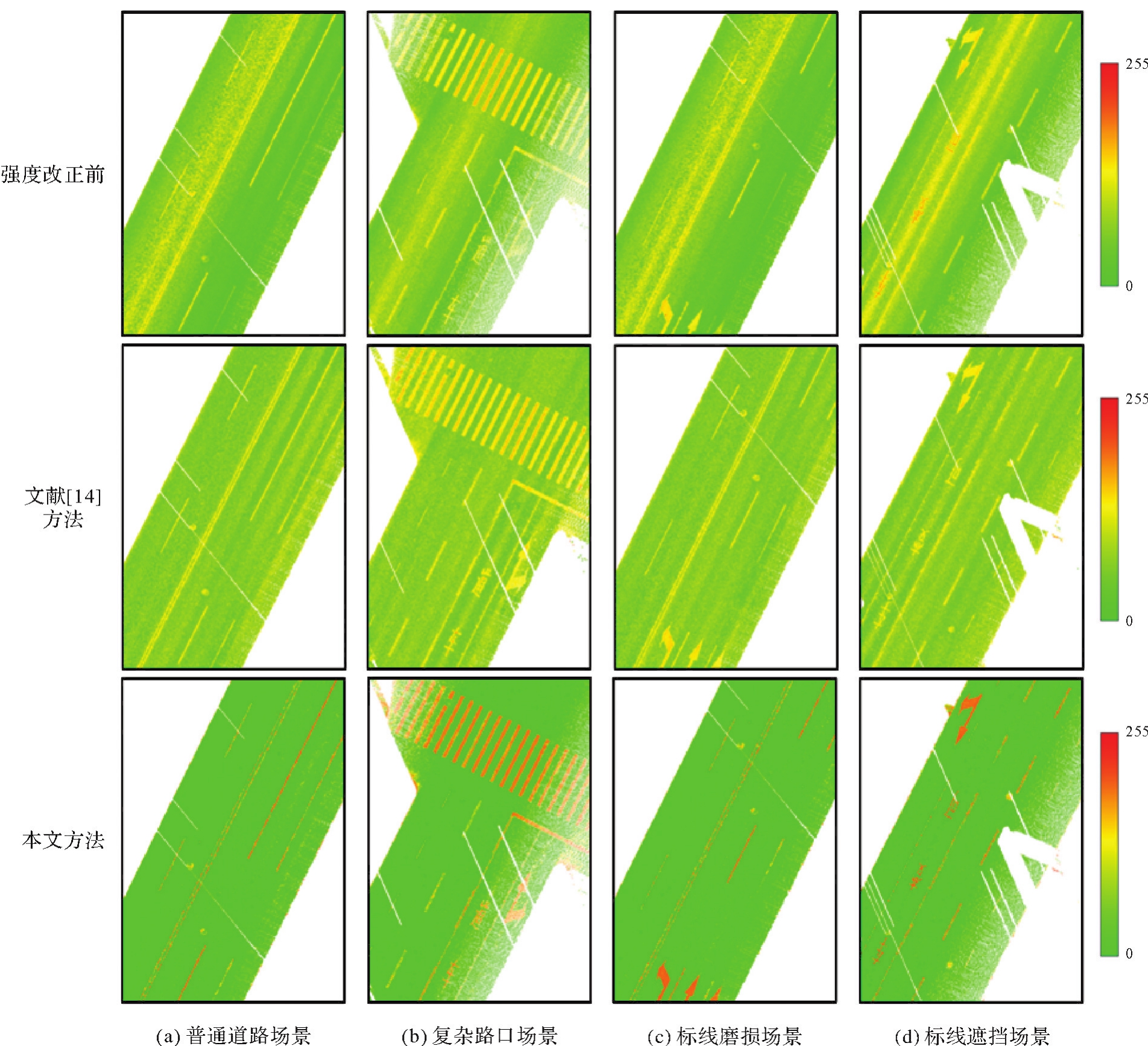

图15
不同分割网络的分割结果"

表2
不同网络分割结果评估对比"
| 试验数据 | 网络结构 | 精度 | 召回率 | F1值 | IOU |
|---|---|---|---|---|---|
| 路段1 | RESA[ | 0.883 1 | 0.925 2 | 0.90 36 | 0.824 7 |
| LST-Net | 0.938 9 | 0.967 9 | 0.953 2 | 0.910 5 | |
| 路段2 | RESA[ | 0.876 0 | 0.881 1 | 0.878 5 | 0.783 3 |
| LST-Net | 0.941 5 | 0.948 8 | 0.945 2 | 0.896 2 | |
| 路段3 | RESA[ | 0.885 6 | 0.899 6 | 0.892 6 | 0.806 4 |
| LST-Net | 0.942 7 | 0.953 3 | 0.947 9 | 0.901 1 |
表3
LST-Net结构消融试验设置"
| 网络结构名称 | 编解码部分 | 注意力模块 | 行列卷积模块 |
|---|---|---|---|
| A | √ | ||
| B | √ | √ | |
| C | √ | √ | |
| D(LST-Net) | √ | √ | √ |

图16
不同网络结构分割结果"
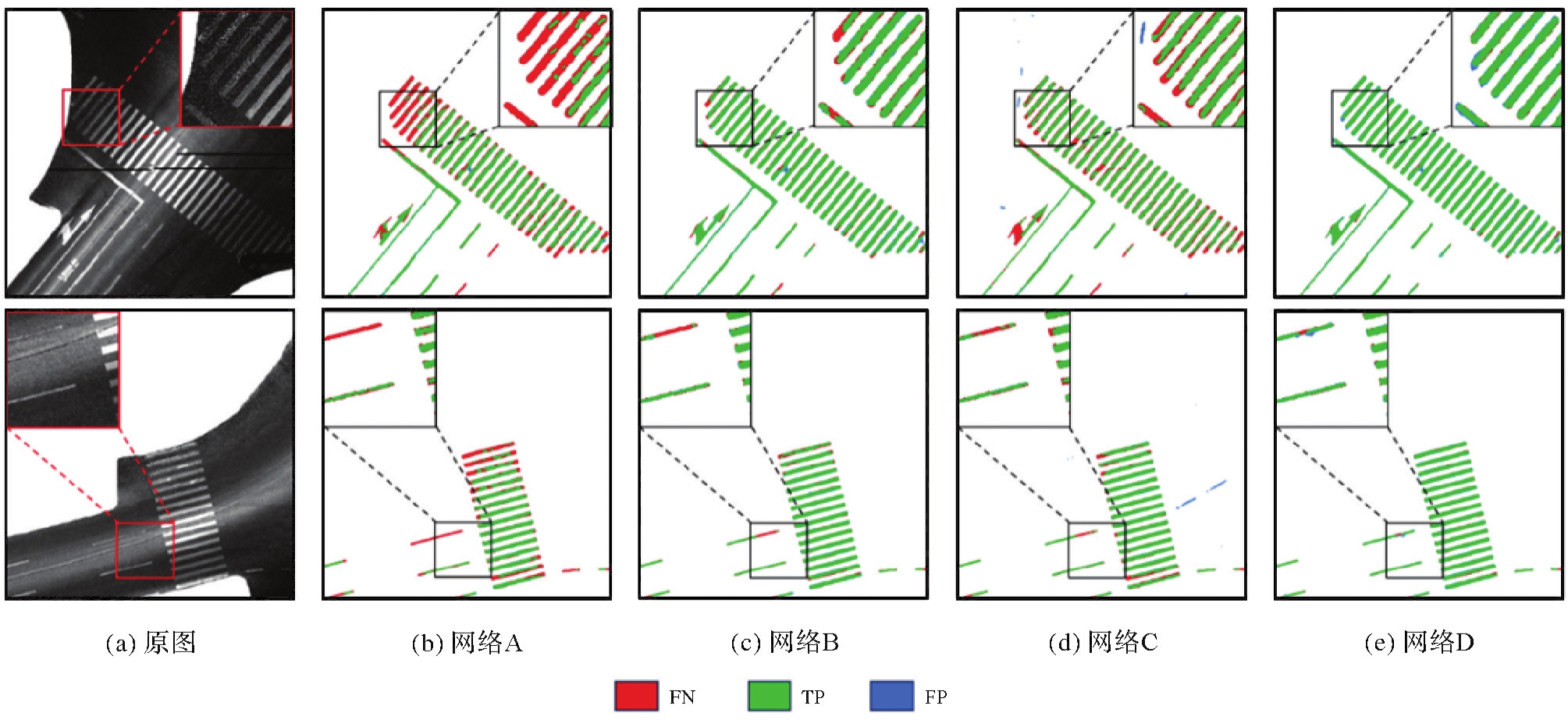
表4
不同网络结构分割结果评估对比"
| 网络结构名称 | 精度 | 召回率 | F1值 | IOU |
|---|---|---|---|---|
| A | 0.927 5 | 0.606 2 | 0.733 2 | 0.575 7 |
| B | 0.906 4 | 0.848 1 | 0.876 3 | 0.779 3 |
| C | 0.882 4 | 0.825 6 | 0.853 1 | 0.739 7 |
| D(LSA-Net) | 0.890 1 | 0.902 2 | 0.896 1 | 0.811 9 |

图17
不同损失函数训练的LST-Net的分割结果"
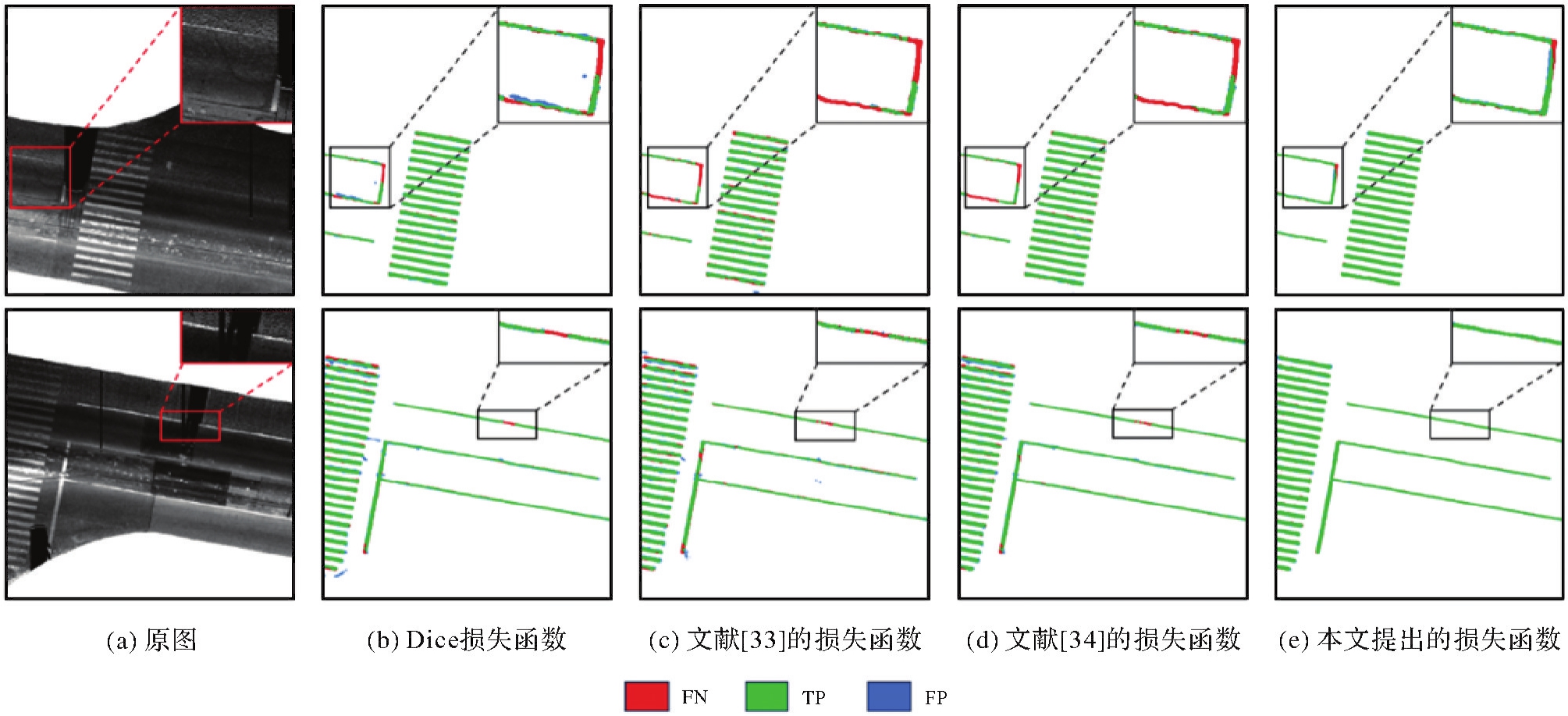
表5
不同损失函数训练的模型分割结果对比"
| 所用损失函数 | 精度 | 召回率 | F1值 | IOU |
|---|---|---|---|---|
| Dice损失 | 0.890 1 | 0.902 2 | 0.896 1 | 0.811 9 |
| 文献[ | 0.879 8 | 0.861 5 | 0.870 5 | 0.770 4 |
| 文献[ | 0.901 4 | 0.894 9 | 0.898 1 | 0.815 6 |
| 本文提出的损失函数 | 0.941 5 | 0.948 8 | 0.945 2 | 0.896 2 |

图18
一阶段与本文方法提取结果对比示例"
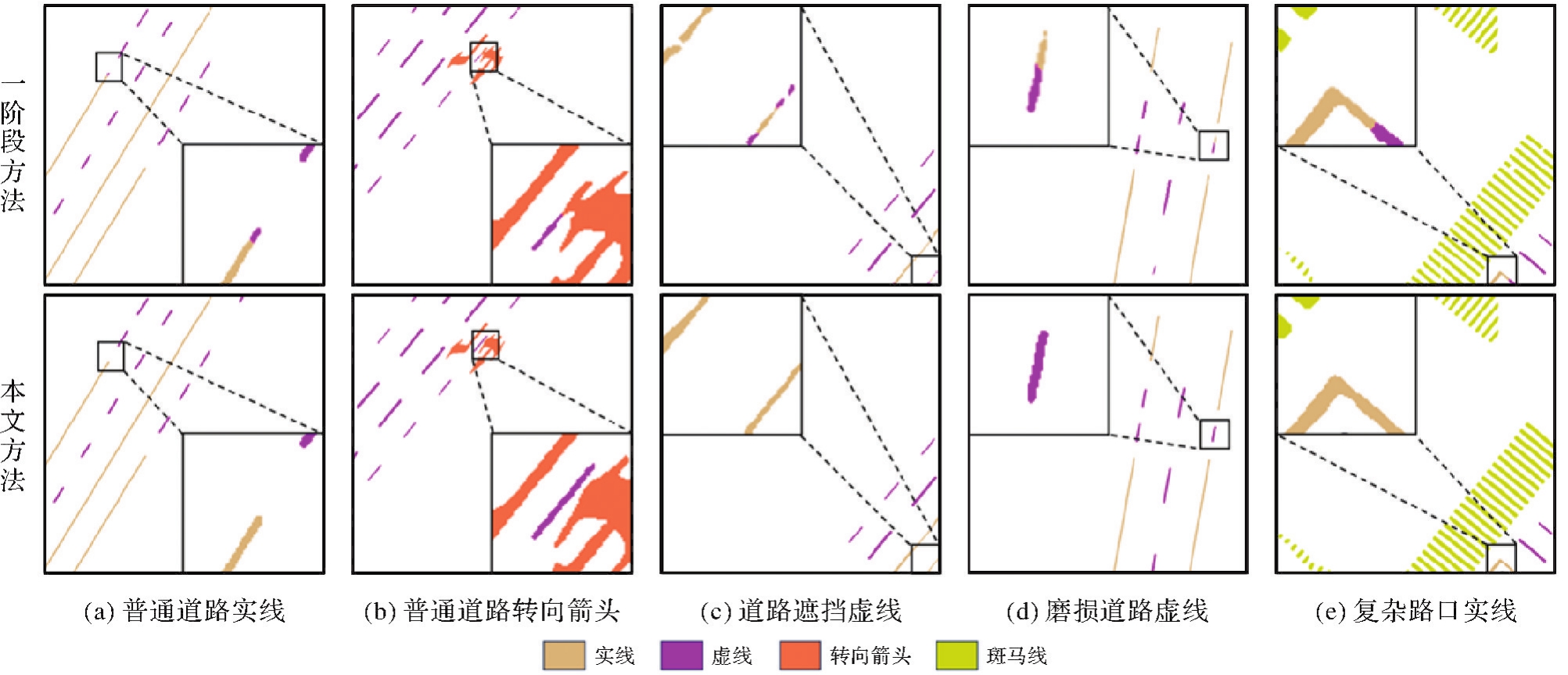
表6
道路标线分类定量评价"
| 道路标线类别 | 数量 | 精度 | 召回率 |
|---|---|---|---|
| 虚线 | 302 | 0.991 | 0.997 |
| 实线 | 669 | 0.996 | 0.975 |
| 转向箭头 | 27 | 0.971 | 0.963 |
| 斑马线 | 17 | 0.966 | 0.969 |
表7
不同道路标线提取方法的定量评价"
| 评价指标 | 提取方法 | 虚线 | 实线 | 转向箭头 | 斑马线 |
|---|---|---|---|---|---|
| 精度 | 一阶段方法 | 0.908 5 | 0.905 6 | 0.926 1 | 0.935 0 |
| 本文方法 | 0.913 7 | 0.936 5 | 0.948 4 | 0.958 7 | |
| 召回率 | 一阶段方法 | 0.875 7 | 0.900 6 | 0.928 1 | 0.927 3 |
| 本文方法 | 0.935 4 | 0.934 5 | 0.930 3 | 0.967 3 |
| [1] | MATHIBELA B, NEWMAN P, POSNER I. Reading the road: road marking classification and interpretation[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2072-2081. |
| [2] |
李德仁, 洪勇, 王密, 等. 测绘遥感能为智能驾驶做什么?[J]. 测绘学报, 2021, 50(11): 1421-1431.DOI:.
doi: 10.11947/j.AGCS.2021.20210280 |
|
LI Deren, HONG Yong, WANG Mi, et al. What can surveying and remote sensing do for intelligent driving?[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1421-1431.DOI:.
doi: 10.11947/j.AGCS.2021.20210280 |
|
| [3] | WU Tao, RANGANATHAN A. A practical system for road marking detection and recognition[C]//Proceedings of 2012 IEEE Intelligent Vehicles Symposium. Madrid: IEEE, 2012: 25-30. |
| [4] | 刘经南, 吴杭彬, 郭迟, 等. 高精度道路导航地图的进展与思考[J]. 中国工程科学, 2018, 20(2): 99-105. |
| LIU Jingnan, WU Hangbin, GUO Chi, et al. Progress and consideration of high precision road navigation map[J]. Strategic Study of CAE, 2018, 20(2): 99-105. | |
| [5] | KIM J G, YOO J H, KOO J C. Road and lane detection using stereo camera[C]//Proceedings of 2018 IEEE International Conference on Big Data and Smart Computing. Shanghai: IEEE, 2018: 649-652. |
| [6] | AZIMI S M, FISCHER P, KORNER M, et al. Aerial LaneNet: lane-marking semantic segmentation in aerial imagery using wavelet-enhanced cost-sensitive symmetric fully convolutional neural networks[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(5): 2920-2938. |
| [7] | YIN Weiling, QIAN Mingyang, WANG Lijun, et al. Road extraction from satellite images with iterative cross-task feature enhancement[J]. Neurocomputing, 2022, 506: 300-310. |
| [8] | YANG Bisheng, WEI Zheng, LI Qingquan, et al. Automated extraction of street-scene objects from mobile LiDAR point clouds[J]. International Journal of Remote Sensing, 2012, 33(18): 5839-5861. |
| [9] | SMADJA L, NINOT J, GAVRILOVIC T. Road extraction and environment interpretation from LiDAR sensors[J]. IAPRS, 2010, 38: 281-286. |
| [10] | TOTH C, PASKAA E, BRZEZINSKA D. Using road pavement markings as ground control for LiDAR data[J]. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2008, 37(Part B1): 189-195. |
| [11] | HATA A, WOLF D. Road marking detection using LiDAR reflective intensity data and its application to vehicle localization[C]//Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems. Qingdao: IEEE, 2014: 584-589. |
| [12] | 谭凯, 程效军, 张吉星. TLS强度数据的入射角及距离效应改正方法[J]. 武汉大学学报(信息科学版), 2017, 42(2): 223-228. |
| TAN Kai, CHENG Xiaojun, ZHANG Jixing. Correction for incidence angle and distance effects on TLS intensity data[J]. Geomatics and Information Science of Wuhan University, 2017, 42(2): 223-228. | |
| [13] | CHEN Xin, KOHLMEYER B, STROILA M, et al. Next generation map making: geo-referenced ground-level LiDAR point clouds for automatic retro-reflective road feature extraction[C]//Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems. Seattle: ACM Press, 2009: 488-491. |
| [14] | WAN Rui, HUANG Yuchun, XIE Rongchang, et al. Combined lane mapping using a mobile mapping system[J]. Remote Sensing, 2019, 11(3): 305. |
| [15] | HUANG Pengdi, CHENG Ming, CHEN Yiping, et al. Traffic sign occlusion detection using mobile laser scanning point clouds[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(9): 2364-2376. |
| [16] | JUNG J, CHE Erzhuo, OLSEN M J, et al. Efficient and robust lane marking extraction from mobile LiDAR point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 147: 1-18. |
| [17] | PAN Yue, YANG Bisheng, LI Shengfu, et al. Automatic road markings extraction, classification and vectorization from mobile laser scanning data[EB/OL]. [2023-07-01].https://isprs-archives.copernicus.org/articles/XLII-2-W13/1089/2019/isprs-archives-XLII-2-W13-1089-2019.pdf. |
| [18] | YE Chengming, ZHAO He, MA Lingfei, et al. Robust lane extraction from MLS point clouds towards HD maps especially in curve road[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 1505-1518. |
| [19] | WEN Chenglu, SUN Xiaotian, LI J, et al. A deep learning framework for road marking extraction, classification and completion from mobile laser scanning point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 147: 178-192. |
| [20] | CHENG Yiting, PATEL A, WEN Chenglu, et al. Intensity thresholding and deep learning based lane marking extraction and lane width estimation from mobile light detection and ranging (LiDAR) point clouds[J]. Remote Sensing, 2020, 12(9): 1379. |
| [21] | MA Lingfei, LI Ying, LI J, et al. Capsule-based networks for road marking extraction and classification from mobile LiDAR point clouds[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(4): 1981-1995. |
| [22] | CHEN Siyun, ZHANG Zhenxin, ZHONG Ruofei, et al. A dense feature pyramid network-based deep learning model for road marking instance segmentation using MLS point clouds[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(1): 784-800. |
| [23] | CHAURASIA A, CULURCIELLO E. LinkNet: exploiting encoder representations for efficient semantic segmentation[C]//Proceedings of 2017 IEEE Visual Communications and Image Processing. St. Petersburg: IEEE, 2017: 1-4. |
| [24] | PAN Xingang, SHI Jianping, LUO Ping, et al. Spatial as deep: spatial CNN for traffic scene understanding[C]//Proceedings of the 32nd AAAI Conference on Artificial Intelligence. [S.l.]: AAAI, 2018. |
| [25] | ZHANG Han, GOODFELLOW I, METAXAS D, et al. Self-attention generative adversarial networks[C]//Proceedings of the 36th International Conference on Machine Learning. Long Beach: [s.n.], 2019: 7354-7363. |
| [26] | HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 770-778. |
| [27] | SASAKI K, IIZUKA S, SIMO-SERRA E, et al. Joint gap detection and inpainting of line drawings[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 5725-5733. |
| [28] | CHENG Yiting, LIN Yichun, HABIB A. Generalized LiDAR intensity normalization and its positive impact on geometric and learning-based lane marking detection[J]. Remote Sensing, 2022, 14(17): 4393. |
| [29] | BAI Jie, NIU Zheng, GAO Shuai, et al. An exploration, analysis, and correction of the distance effect on terrestrial hyperspectral LiDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2023, 198: 60-83. |
| [30] | ZHENG Tu, FANG Hao, ZHANG Yi, et al. RESA: recurrent feature-shift aggregator for lane detection[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(4): 3547-3554. |
| [31] | FENG Zhengyang, GUO Shaohua, TAN Xin, et al. Rethinking efficient lane detectionvia curve modeling[C]//Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans: IEEE, 2022: 17062-17070. |
| [32] | WANG Jinsheng, MA Yinchao, HUANG Shaofei, et al. A keypoint-based global association network for lane detection[C]//Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans: IEEE, 2022: 1392-1401. |
| [33] | MOSINSKA A, MARQUEZ-NEILA P, KOZINSKI M, et al. Beyond the pixel-wise loss for topology-aware delineation[C]//Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018. |
| [34] | SHIT S, PAETZOLD J C, SEKUBOYINA A, et al. clDice—a novel topology-preserving loss function for tubular structure segmentation[C]//Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville: IEEE, 2021. |
| [35] | RONNEBERGER O, FISCHER P, BROX T. U-Net: convolutional networks for biomedical image segmentation[C]//Proceedings of 2015 MICCAI. Cham: Springer International Publishing, 2015: 234-241. |
| [1] | 王泽矫, 向隆刚, 王猛, 王兴娟, 刘清. 融合层级特征与多样化注意力的道路面与中心线协同提取网络[J]. 测绘学报, 2026, 55(3): 548-563. |
| [2] | 唐康, 孙玉, 仲逍阳, 高嘉良, 陈崇成. 路侧违停车辆移动影像检测方法[J]. 测绘学报, 2025, 54(9): 1712-1726. |
| [3] | 谢亚坤, 赵耀纪, 涂佳星, 夏瑞丰, 冯德俊, 刘苏凝, 陈虹宇, 朱军. 融合边缘与全局特征的遥感影像显著性目标检测方法[J]. 测绘学报, 2025, 54(7): 1265-1279. |
| [4] | 万杰, 谢忠, 徐永洋, 陶留锋. 面向城市道路场景的车载LiDAR点云语义分割U形图卷积网络方法[J]. 测绘学报, 2025, 54(7): 1280-1293. |
| [5] | 胡波, 陈翰新, 任松, 屈英豪, 刘清屹, 涂歆玥, 王大涛. 一种基于分割掩码的隧道裂缝病害自动识别后处理算法[J]. 测绘学报, 2024, 53(9): 1715-1724. |
| [6] | 徐涛, 杨元维, 高贤君, 王志威, 潘越, 李少华, 许磊, 王艳军, 刘波, 余静, 吴凤敏, 孙浩宇. 融合图卷积与多尺度特征的接触网点云语义分割[J]. 测绘学报, 2024, 53(8): 1624-1633. |
| [7] | 杨军, 解恒静, 范红超, 闫浩文. 遥感影像目标检测多尺度熵神经网络架构搜索[J]. 测绘学报, 2024, 53(7): 1384-1400. |
| [8] | 黄启灏, 靳国旺, 熊新, 王丽美, 李佳豪. 通道剪枝与知识蒸馏相结合的轻量化SAR目标检测[J]. 测绘学报, 2024, 53(4): 712-723. |
| [9] | 林云浩, 王艳军, 李少春, 蔡恒藩. 一种耦合DeepLab与Transformer的农作物种植类型遥感精细分类方法[J]. 测绘学报, 2024, 53(2): 353-366. |
| [10] | 孙根云, 孙超, 张爱竹. 融合多尺度与边缘特征的道路提取网络[J]. 测绘学报, 2024, 53(12): 2233-2243. |
| [11] | 陈玮彤, 许鑫, 朱长青, 任娜. 基于后门水印和感兴趣区加密的遥感目标检测数据集版权保护算法[J]. 测绘学报, 2024, 53(11): 2086-2098. |
| [12] | 张银胜, 陈戈, 段修贤, 童俊毅, 单梦姣, 单慧琳. 基于多层特征信息融合的滑坡图像分割模型[J]. 测绘学报, 2024, 53(11): 2201-2212. |
| [13] | 胡功明, 杨春成, 徐立, 尚海滨, 王泽凡, 秦志龙. 改进U-Net的遥感图像语义分割方法[J]. 测绘学报, 2023, 52(6): 980-989. |
| [14] | 刘帅, 李笑迎, 于梦, 邢光龙. 高分辨率遥感图像双解耦语义分割网络模型[J]. 测绘学报, 2023, 52(4): 638-647. |
| [15] | 沈秭扬, 倪欢, 管海燕. 遥感图像跨域语义分割的无监督域自适应对齐方法[J]. 测绘学报, 2023, 52(12): 2115-2126. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||