


测绘学报 ›› 2025, Vol. 54 ›› Issue (1): 40-51.doi: 10.11947/j.AGCS.2025.20230488
万宏发( ), 李姗姗(), 李新星, 范昊鹏, 谭勖立
), 李姗姗(), 李新星, 范昊鹏, 谭勖立
收稿日期:2023-11-01
修回日期:2024-12-10
出版日期:2025-02-17
发布日期:2025-02-17
通讯作者:
李姗姗
E-mail:whf16638240173@163.com;zzy_lily@sina.com
作者简介:万宏发(1999—),男,博士,研究方向为重力辅助惯性导航。 E-mail:whf16638240173@163.com
基金资助:
Hongfa WAN(), Shanshan LI(), Xinxing LI, Haopeng FAN, Xuli TAN
Received:2023-11-01
Revised:2024-12-10
Online:2025-02-17
Published:2025-02-17
Contact:
Shanshan LI
E-mail:whf16638240173@163.com;zzy_lily@sina.com
About author:WAN Hongfa (1999—), male, PhD, majors in gravity-assisted inertial navigation. E-mail: whf16638240173@163.com
Supported by:摘要:
重力辅助惯性导航是实现水下潜器长期、自主、隐蔽、精确导航的重要手段之一。水下重力传感器实时测量数据的获取以及测量数据误差补偿是将重力导航付诸实际工程需重点关注的问题。由于实施水下重力测量试验受诸多条件限制,因而缺乏符合实际物理特性的水下重力实时测量值,导致对其特性及其精度水平的认知偏差,进而影响重力辅助惯性导航的性能。海洋水下重力实时测量数据仿真依据现有海洋重力仪以及惯导元器件的性能特性对水下重力实时观测进行模拟仿真、数据处理以及精度评估,可在实验室环境下再现水下重力数据实时获取的物理过程。试验中分析了不同速度误差、纬度误差、方位角对重力测量在不同纬度处的影响,并仿真了一段24 h的水下动态重力测量过程,结果表明在选定的惯性元器件和重力仪参数条件下,自由空间重力异常测量精度为3.5 mGal,为进一步开展重力辅助惯性导航关键技术及算法模型的有效验证与优化提升提供了有效支撑。
中图分类号:
万宏发, 李姗姗, 李新星, 范昊鹏, 谭勖立. 水下重力实时测量数据仿真及精度分析[J]. 测绘学报, 2025, 54(1): 40-51.
Hongfa WAN, Shanshan LI, Xinxing LI, Haopeng FAN, Xuli TAN. Simulation and accuracy analysis of real-time underwater gravity measurement data[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 40-51.
表1
参数设置"
| 仪器类别 | 惯导误差项(常值零偏) | 重力仪误差项(常值零偏) |
|---|---|---|
| 陀螺仪(x,y,z轴)/(°)/h | 0.002 | — |
| 水平加速度计(x,y轴)/mGal | 10 | 50 |
| 垂向加速度计(z轴)/mGal | 10 | 3 |

图1
静基座重力测量误差仿真结果"

图2
正常重力误差随纬度和纬度误差的变化"
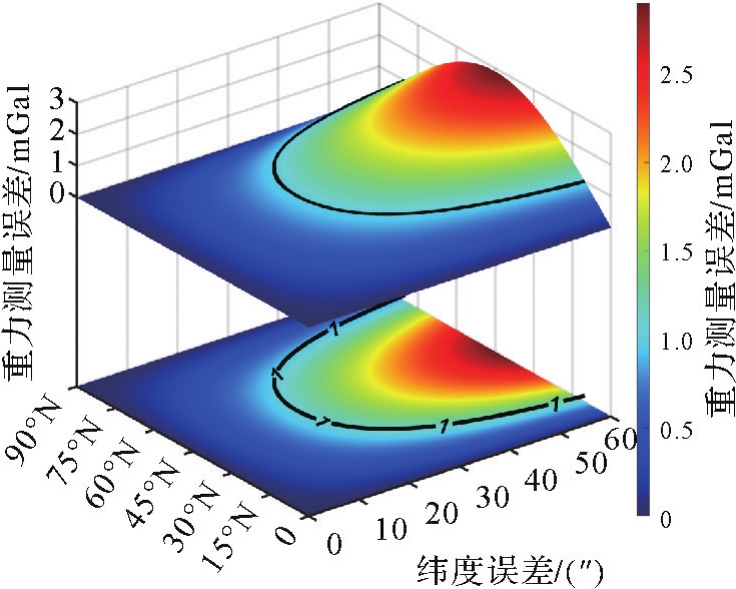
图3
重力测量误差随纬度和方位角的变化"

图4
重力测量误差随纬度和纬度误差的变化"
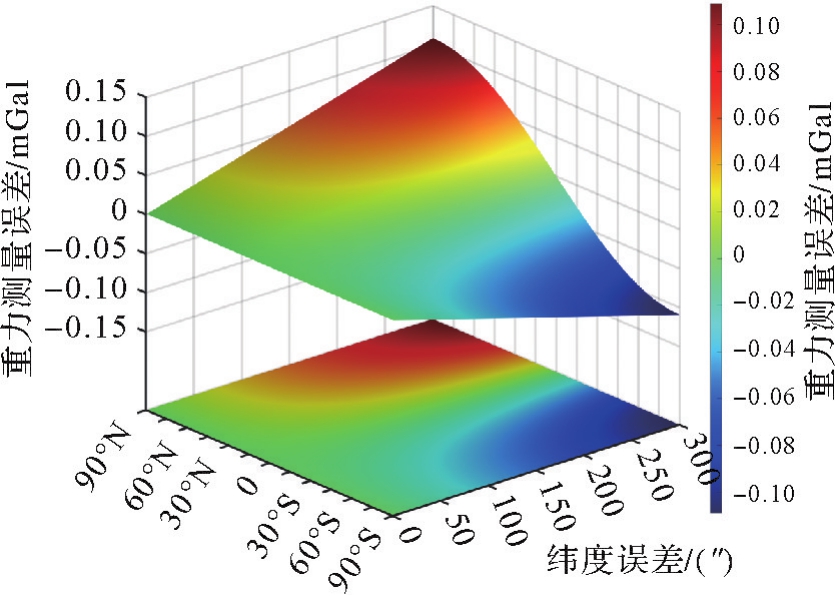
图5
重力测量误差随纬度和速度误差的变化"
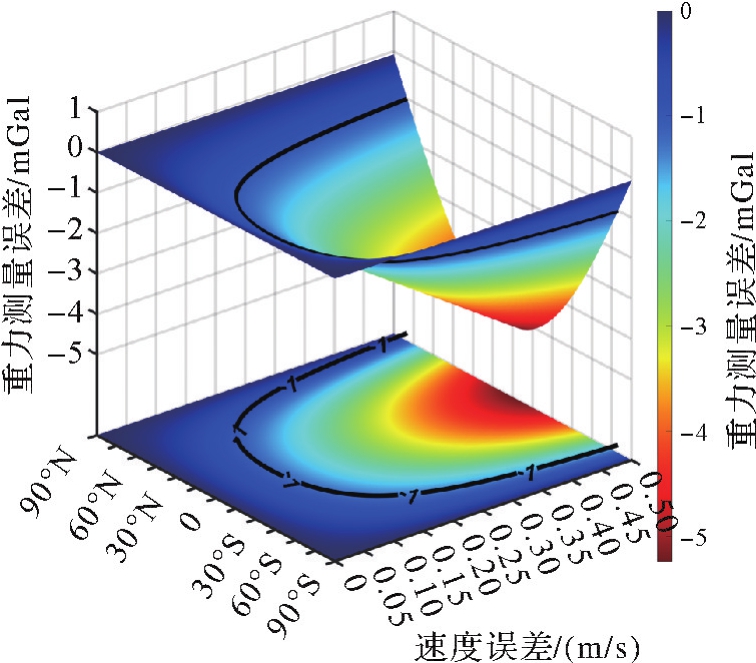
表2
水下重力测量航迹参数"
| 初始姿态/(°) | 初始速度/(m/s) | 初始坐标 | 航迹时长(世界时) |
|---|---|---|---|
| 俯仰角:0 | 东向:0 | 111.000°E | 2022年1月1日0时—24时 |
| 横滚角:0 | 天向:0 | 7.000°N | |
| 偏航角:0 | 北向:0 | 高程-100 m |
表3
海洋重力仪参数设置"
| 仪器类别 | 惯导误差项(常值零偏) | 重力仪误差项(常值零偏) | ||
|---|---|---|---|---|
| 常值零偏 | 随机游走 | 常值零偏 | 随机游走 | |
| 陀螺仪(x,y,z轴) | 0.002°/h |  | — | — |
| 水平加速度计(x,y轴) | 10 mGal |  | 50 mGal |  |
| 垂向加速度计(z轴) | 10 mGal |  | 3 mGal |  |
图6
水下动态重力测量仿真轨迹"
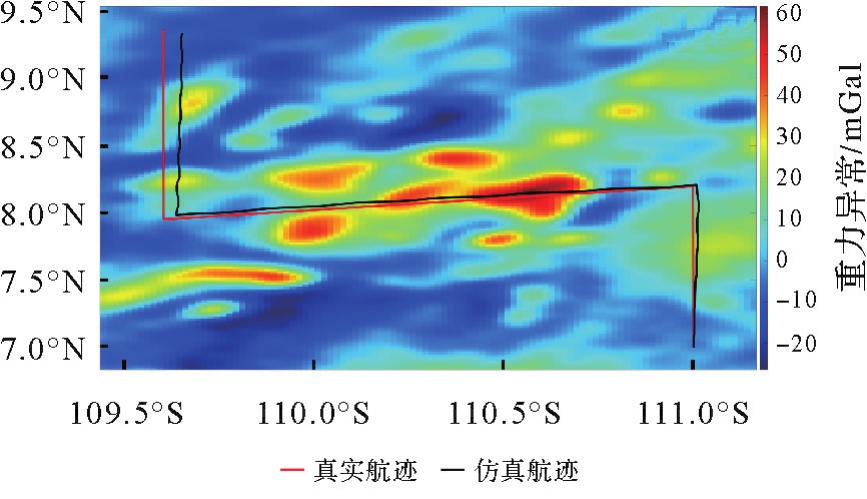
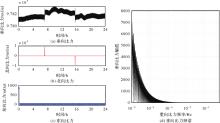
图7
动态重力仪比力仿真结果"
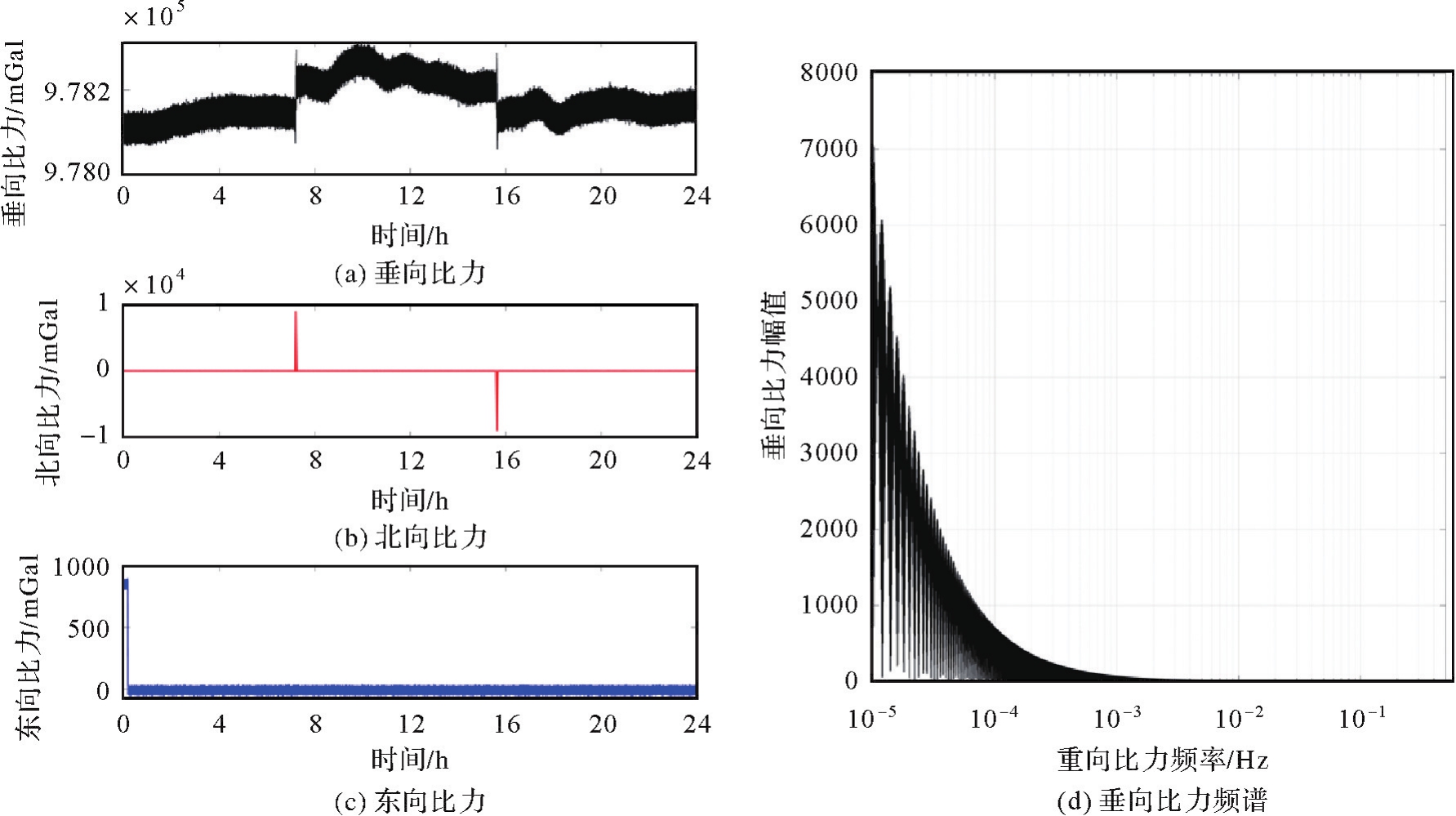

图8
动态重力测量仿真结果"

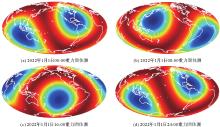
图9
世界时2022年1月1日0时至24时重力固体潮仿真试验结果"

图10
动态重力测量FIR滤波结果"
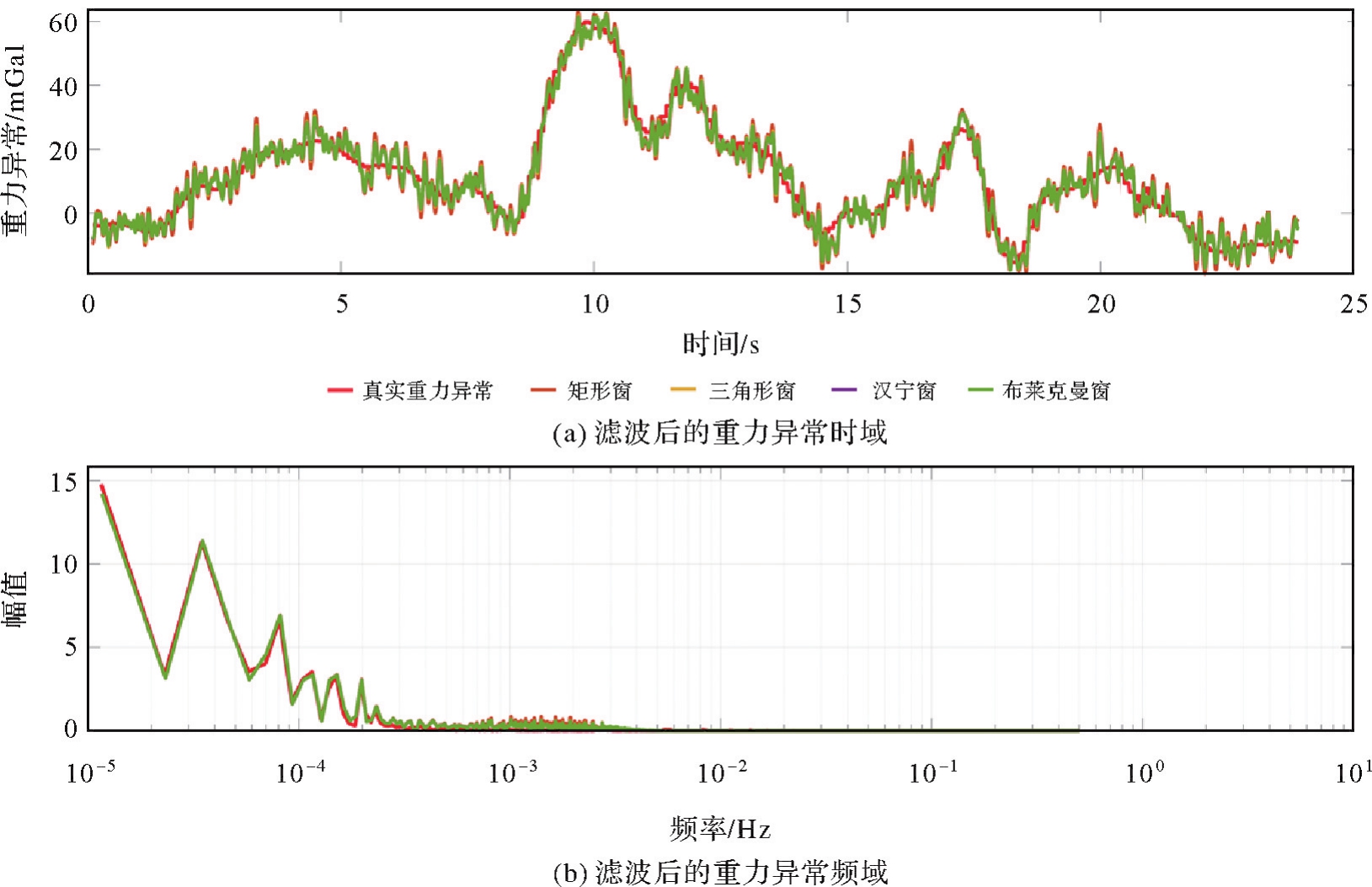
表4
动态重力测量低通滤波结果"
| 误差类型 | 平均误差/mGal | 最大值/mGal | 均方误差/mGal | 相关系数 |
|---|---|---|---|---|
| 矩形窗 | 21.147 8 | 15.926 6 | 4.270 5 | 0.967 0 |
| 三角形窗 | 21.148 2 | 13.987 5 | 3.647 2 | 0.975 6 |
| 汉宁窗 | 21.148 3 | 13.451 0 | 3.512 3 | 0.977 3 |
| 布莱克曼窗 | 21.148 4 | 13.436 8 | 3.510 3 | 0.977 3 |
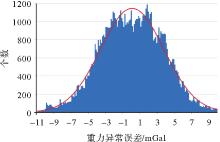
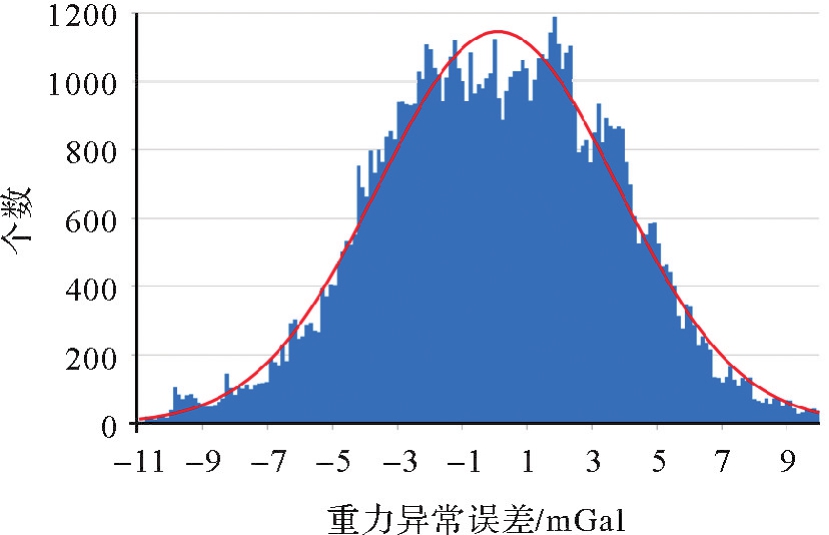
图11
重力异常误差分布统计"
| [1] | WANG Yong, WU Lin, CHAI Hua, et al. Technology of gravity aided inertial navigation system and its trial in South China Sea[J]. IET Radar, Sonar & Navigation, 2016, 10(5): 862-869. |
| [2] | LIU Fanming, LI Fangming, JING Xin. INS/gravity gradient aided navigation based on gravitation field particle filter[J]. Open Physics, 2019, 17(1): 709-718. |
| [3] | 李姗姗. 水下重力辅助惯性导航的理论与方法研究[D]. 郑州: 信息工程大学, 2011. |
| LI Shanshan. Research on the theory and method of underwater gravity-aided inertial navigation[D]. Zhengzhou: Information Engineering University, 2011. | |
| [4] | WANG Wei, GAO Jinyao, LI Dongming, et al. Measurements and accuracy evaluation of a strapdown marine gravimeter based on inertial navigation[J]. Sensors, 2018, 18(11): 3902. |
| [5] | 李爱华. 动态矢量重力测量系统仿真研究[D]. 南京: 东南大学, 2017. |
| LI Aihua. Research and simulation of dynamic vector gravimetry system[D]. Nanjing: Southeast University, 2017. | |
| [6] |
CAI Tijing, FANG Ke. A new method for determining the gravity disturbance vector in strapdown airborne gravimetry[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71. DOI:.
doi: 10.1109/TIM.2022.3193168 |
| [7] | 刘超华, 赵勇, 杨俊东. 基于LabVIEW的重力仪仿真与测试系统设计[J]. 现代电子技术, 2011, 34(10): 182-185. |
| LIU Chaohua, ZHAO Yong, YANG Jundong. Simulation and test system of gravimeter based on LabVIEW[J]. Modern Electronics Technique, 2011, 34(10): 182-185. | |
| [8] | 汪凤林, 温秀兰, 林健, 等. RAPINS/GPS/L/重力仪海洋重力测量系统仿真[J]. 东南大学学报(自然科学版), 2010, 40(): 331-336. |
| WANG Fenglin, WEN Xiulan, LIN Jian, et al. Research and simulation on marine gravity measuring system of RAPINS/GPS/Gravimeter[J]. Journal of Southeast University (Natural Science Edition), 2010, 40(): 331-336. | |
| [9] | YU Dongyao, XIONG Zhiming, CAO Juliang, et al. Methods for underwater gravity measurement error compensations based on correlation analysis[J]. Applied Sciences, 2022, 12(20): 10511. |
| [10] | ZHANG Zhiqiang, LIU Zhongle, ZHANG Hongxin. Underwater mobile gravity measurement data processing using continuous-discrete Kalman filter[J]. AIP Advances, 2021, 11(8): 085104. |
| [11] | AI Wenyu, ZHONG Sheng, LENG Yue, et al. A real-time autonomous gravity measurement method for underwater gravity-aided navigation[J]. IEEE Access, 2023, 11: 135728-135737. |
| [12] | 王傲明, 李姗姗, 李新星, 等. 基于自适应并行扩展卡尔曼滤波的SITAN匹配算法[J]. 中国惯性技术学报, 2022, 30(1): 81-88. |
| WANG Aoming, LI Shanshan, LI Xinxing, et al. SITAN matching algorithm based on adaptive parallel extended Kalman filter[J]. Journal of Chinese Inertial Technology, 2022, 30(1): 81-88. | |
| [13] | 黄炎, 李姗姗, 谭勖立, 等. 基于地球重力场模型的重力匹配数据随机线性化方法[J]. 中国惯性技术学报, 2022, 30(3): 328-335. |
| HUANG Yan, LI Shanshan, TAN Xuli, et al. Random linearization method of gravity matching data based on earth gravity field model[J]. Journal of Chinese Inertial Technology, 2022, 30(3): 328-335. | |
| [14] | HUANG Motao, DENG Kailiang, WU Taiqi, et al. Research and evaluation on key technological indicators for airborne and shipborne gravimetry[J]. Journal of Geodesy and Geoinformation Science, 2020, 2(3): 44-54. |
| [15] | 王博, 李天姣, 李晓平. 水下惯性/重力梯度匹配导航综述[J]. 战术导弹技术, 2023(4): 1-12. |
| WANG Bo, LI Tianjiao, LI Xiaoping. Review of underwater inertial/gravity gradient matching navigation[J]. Tactical Missile Technology, 2023(4): 1-12. | |
| [16] | 万晓云, 吴云龙, 郭恒洋, 等. 基于重力场产品的水下匹配导航发展现状及影响因素分析[J]. 武汉大学学报(信息科学版), 2023, 48(6): 879-890. |
| WAN Xiaoyun, WU Yunlong, GUO Hengyang, et al. Development status and influencing factor analysis of underwater matching navigation based on gravity field products[J]. Geomatics and Information Science of Wuhan University (Natural Science Edition), 2023, 48(6): 879-890. | |
| [17] | 陈小炜, 姜广胜, 陈静. 蚁群算法在辅助导航重力匹配中的应用[J]. 空军工程大学学报, 2022, 23(6): 79-83. |
| CHEN Xiaowei, JIANG Guangsheng, CHEN Jing. The application of ant colony algorithm in gravity matching of aid navigation[J]. Journal of Air Force Engineering University, 2022, 23(6): 79-83. | |
| [18] | 孙中苗. 航空重力测量理论、方法及应用研究[D]. 郑州: 信息工程大学, 2005. |
| SUN Zhongmiao. Theory, methods and applications of airborne gravimetry[D]. Zhengzhou: Information Engineering University, 2005. | |
| [19] | 黄杨明. 高精度捷联式航空重力仪误差估计方法研究[D]. 长沙: 国防科学技术大学, 2015. |
| HUANG Yangming. Research on error estimation of precise strapdown airborne gravimeter[D]. Changsha: National University of Defense Technology, 2015. | |
| [20] | 严恭敏. 捷联惯导算法及车载组合导航系统研究[D]. 西安: 西北工业大学, 2004. |
| YAN Gongmin. Research on strapdown inertial navigation algorithm and vehicle integrated navigation system[D]. Xi'an: Northwestern Polytechnical University, 2004. | |
| [21] | 王福民, 叶宇星. S-Ⅱ型海洋重力仪介绍和使用方法[J]. 物探装备, 2007(3): 210-214. |
| WANG Fumin, YE Yuxing. Introduction S-II marine gravimeter and its usage[J]. Equipment for Geophysical Prospecting, 2007(3): 210-214. | |
| [22] | 付永涛, 王先超, 谢天峰. KSS31 M型海洋重力仪动态性能的分析[J]. 海洋科学, 2007(6): 29-33. |
| FU Yongtao, WANG Xianchao, XIE Tianfeng. Verifying the dynamic properties of KSS31M marine gravity-meter by the observed gravity reading and GPS data[J]. Marine Science, 2007(6): 29-33. | |
| [23] | 王傲明, 李姗姗, 范雕, 等. 水下惯性导航系统姿态算法的适用性分析[J]. 大地测量与地球动力学, 2022, 42(3): 281-285. |
| WANG Aoming, LI Shanshan, FAN Diao. Applicability analysis of attitude algorithm for underwater inertial navigation system[J]. Journal of Geodesy and Geodynamics, 2022, 42(3): 281-285. | |
| [24] | 魏子卿. 正常重力公式[J]. 测绘学报, 2003, 32(2): 95-101. |
| WEI Ziqing. Normal gravity formulae[J]. Acta Geodaetica et Cartographica Sinica, 2003, 32(2): 95-101. | |
| [25] | HINZE W J, AIKEN C, BROZENA J, et al. New standards for reducing gravity data: the north american gravity database[J]. Geophysics, 2005, 70(4): J25-J32. |
| [26] | 徐华君, 柳林涛, 罗孝文. 全球重力固体潮的仿真实现[J]. 系统仿真学报, 2009, 21(24): 7824-7827. |
| XU Huajun, LIU Lintao, LUO Xiaowen. Simulation of gravity earth tide[J]. Journal of System Simulation, 2009, 21(24): 7824-7827. | |
| [27] | 闫如玉, 万永革, 解朝娣, 等. 基于Matlab GUI的全球重力固体潮可视化实现[J]. 地震地磁观测与研究, 2019, 40(3): 160-167. |
| YAN Ruyu, WAN Yongge, XIE Chaodi, et al. Visualization of gravity earth tides based on Matlab GUI[J]. Seismological and Geomagnetic Observation and Research, 2019, 40(3): 160-167. | |
| [28] | CAI Yanhui, ZHANG Li, MA Xu. Using WGM2012 to compute gravity anomaly corrections of leveling observations in China[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(1): 88-94. |
| [29] | 张志强. 水下移动重力测量理论方法及应用研究[D]. 武汉: 武汉大学, 2021. |
| ZHANG Zhiqiang. Theory method and application of underwater mobile gravity measurement[D]. Wuhan: Wuhan University, 2021. | |
| [30] | 郎骏健, 梁星辉, 涂海波, 等. CHZ-Ⅱ海空重力仪格值标定[J]. 大地测量与地球动力学, 2020, 40(3): 323-326. |
| LANG Junjian, LIANG Xinghui, TU Haibo, et al. Calibration of scale value for CHZ-Ⅱ air-sea gravimeter[J]. Journal of Geodesy and Geodynamics, 2020, 40(3): 323-326. | |
| [31] | YUAN Yuan, WU Zhaocai, GAO Jinyao, et al. Establishing a marine gravimeter test site in the South China Sea to validate the performance of different marine gravimeters[J]. Remote Sensing, 2024, 17(1): 14. |
| [32] | 袁园, 高金耀, 高巍. 基于惯性稳定平台的ZL11-1A海洋重力仪性能评估[J]. 海洋测绘, 2021, 41(1): 22-26. |
| YUAN Yuan, GAO Jinyao, GAO Wei. A new shipborne gravimeter ZL11-1A based on inertial stabilization platform and its performance evaluation[J]. Hydroaphic Surveying and Charting, 2021, 41(1): 22-26. | |
| [33] | CAI Shaokun, ZHANG Kaidong, WU Meiping. Improving airborne strapdown vector gravimetry using stabilized horizontal components[J]. Journal of Applied Geophysics, 2013, 98: 79-89. |
| [34] | CAI Shaokun, TIE Junbo, ZHANG Kaidong, et al. Marine gravimetry using the strapdown gravimeter SGA-WZ[J]. Marine Geophysical Research, 2017, 38(4): 325-340. |
| [1] | 周瑞, 朱锋, 张小红. 基于先验位姿与运动编排的相机惯导外参标定方法[J]. 测绘学报, 2026, 55(3): 465-476. |
| [2] | 杨元喜, 任夏, 张强, 侯明强, 肖定邦, 朱凌晓. 量子PNT发展及其关键技术[J]. 测绘学报, 2026, 55(1): 1-9. |
| [3] | 李根, 柴洪洲, 靳凯迪, 展昭. 水下地形匹配定位抗差粒子滤波算法[J]. 测绘学报, 2025, 54(10): 1841-1851. |
| [4] | 张盼盼, 武凛, 鲍李峰, 李倩倩, 刘会, 席梦寒, 王勇. 基于多频段重力扰动的惯性导航系统重力补偿方法研究[J]. 测绘学报, 2023, 52(8): 1255-1267. |
| [5] | 朱宁宁, 杨必胜, 陈驰, 董震. 点-线特征联合的全景图像位姿解算方法[J]. 测绘学报, 2023, 52(2): 218-229. |
| [6] | 卞鸿巍, 文者, 马恒, 王荣颖. 惯导极区模拟测试船用IMU转换修正误差公式简化与分析[J]. 测绘学报, 2022, 51(9): 1890-1898. |
| [7] | 黎奇, 白征东, 陈波波, 过静珺, 辛浩浩, 程宇航, 黎琼, 吴斐. GNSS/INS多传感器组合高速铁路轨道测量系统[J]. 测绘学报, 2020, 49(5): 569-579. |
| [8] | 刘韬, 徐爱功, 隋心. 惯性导航EEMD区间阈值降噪方法[J]. 测绘学报, 2018, 47(7): 907-915. |
| [9] | 刘繁明 张迎发 钱东 姚建奇. 全张量地磁梯度基准图构建及其组合导航方法[J]. 测绘学报, 2014, 43(3): 322-328. |
| [10] | 甘雨,隋立芬,王冰. 经验模态分解阈值消噪方法及其在惯性导航系数数据处理中的应用[J]. 测绘学报, 2012, 41(4): 0-590. |
| [11] | 李姗姗,,吴晓平,马彪,. 水下重力异常相关极值匹配算法研究[J]. 测绘学报, 2011, 40(4): 0-441. |
| [12] | 王志刚,边少锋. 基于局部地球重力场模型的水下重力辅助惯性导航[J]. 测绘学报, 2009, 38(5): 0-414. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||