


测绘学报 ›› 2026, Vol. 55 ›› Issue (5): 761-775.doi: 10.11947/j.AGCS.2026.20250355
• 北斗/GNSS多源传感器融合PNT • 下一篇
施闯1,2,3,4( ), 陈鑫鑫1,2,3, 王家乐1,2,3,4,5(), 夏鸣1,2,3,4
), 陈鑫鑫1,2,3, 王家乐1,2,3,4,5(), 夏鸣1,2,3,4
收稿日期:2025-09-04
修回日期:2026-04-30
出版日期:2026-06-23
发布日期:2026-06-23
通讯作者:
王家乐
E-mail:shichuang@buaa.edu.cn;wang_jiale@buaa.edu.cn
作者简介:施闯(1968—),男,博士,教授,中国科学院院士,研究方向为北斗高精度导航定位授时、通信导航融合。 E-mail:shichuang@buaa.edu.cn
基金资助:
Chuang SHI1,2,3,4(), Xinxin CHEN1,2,3, Jiale WANG1,2,3,4,5(), Ming XIA1,2,3,4
Received:2025-09-04
Revised:2026-04-30
Online:2026-06-23
Published:2026-06-23
Contact:
Jiale WANG
E-mail:shichuang@buaa.edu.cn;wang_jiale@buaa.edu.cn
About author:SHI Chuang (1968—), male, PhD, professor, academician of the Chinese Academy of Science, majors in high-precision BeiDou navigation positioning and timing, and navigation-communication integration. E-mail: shichuang@buaa.edu.cn
Supported by:摘要:
智能手机作为当前普及率最高的低成本GNSS终端,受限于内置线性极化天线的物理特性,其GNSS信号接收易受城市楼宇和树木等复杂环境遮挡干扰,导致观测值存在显著多路径效应、载波相位连续性差等问题,进而引发定位精度大幅退化。为解决这一难题,本文以安卓系统开放的多源观测数据为核心输入,包括GNSS原始测量信息、惯性传感器衍生的姿态偏航角与速度,以及定位解算过程中的伪距残差、位置精度因子等质量指标,在典型城市复杂场景中开展动态数据采集,构建面向智能手机RTK三维定位误差的预测与修正框架。针对定位误差的时空关联性与多特征耦合特性,本文提出融合通道-空间双注意力机制的卷积长短期记忆(CNN-LSTM)神经网络:通过卷积层提取多源特征的空间关联性,LSTM层捕捉误差序列的时间依赖关系,双注意力机制则分别强化关键卫星通道与核心观测特征的权重,实现对复杂环境下误差模式的精准建模。基于小米Mi 8与谷歌Pixel 6两款不同硬件配置的智能手机,在非对称遮挡过渡环境以及遮挡严重环境下的测试结果表明,Mi 8的定位精度分别提升了约49.3%和63.9%;Pixel 6则分别提升了37.5%和47.1%,验证了本文方法在不同硬件终端与复杂场景下的通用性与有效性,为智能手机高精度定位提供了轻量级算法支撑。
中图分类号:
施闯, 陈鑫鑫, 王家乐, 夏鸣. 多源GNSS数据与深度学习驱动的智能手机RTK定位误差预测[J]. 测绘学报, 2026, 55(5): 761-775.
Chuang SHI, Xinxin CHEN, Jiale WANG, Ming XIA. Multi-source GNSS data and deep learning-driven RTK positioning error prediction for smartphones[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 761-775.
表1
被选取的多源卫星特征参数"
| 数据源/类名 | 参数/接口名称 | 描述 | 单位 |
|---|---|---|---|
| GnssClock类 | BiasUncertaintyNanos | 描述FullBiasNanos(手机内部时钟与GPST的总偏差)和BiasNanos(GNSS芯片时钟与GPST的亚纳秒级偏差)的不确定度 | ns |
| GnssMeasurement类 | ReceivedSvTimeUncertaintyNanos | 接收到的卫星的发射时刻不确定度 | ns |
| AccumulatedDeltaRangeUncertaintyMeters | 载波相位不确定度 | m | |
| Cn0DbHz | 载噪比 | dB-Hz | |
| 惯导传感器[ | 姿态偏航角 | 描述设备运动方向与正北方向的夹角 | ° |
| 惯导传感器 | 平面运动速度 | 设备在北方向与东方向的运动速度 | m/s |
| 后处理 | 伪距残差 | 观测伪距与根据定位结果计算的理论伪距之间的差值,反映观测值的拟合程度 | m |
| 后处理 | PDOP | 描述卫星几何构型对定位精度的影响程度 | — |
| 后处理 | 历元间位置差分 | 相邻两个历元之间计算出的三维位置变化量 | m |
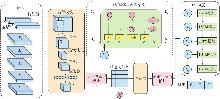
图1
融合通道-空间双注意力机制的CNN-LSTM神经网络"
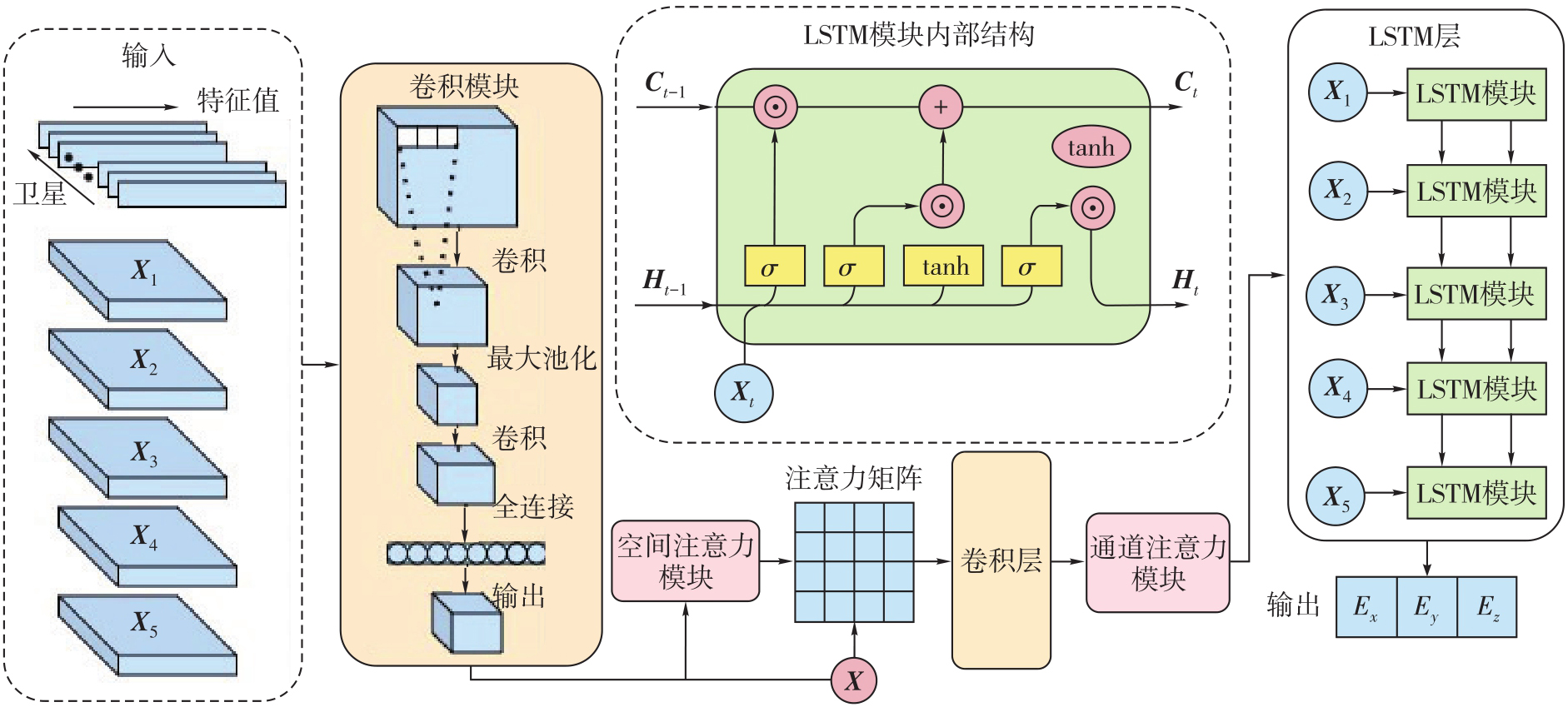
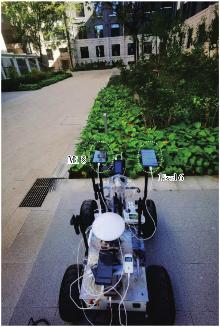
图2
数据采集设备"
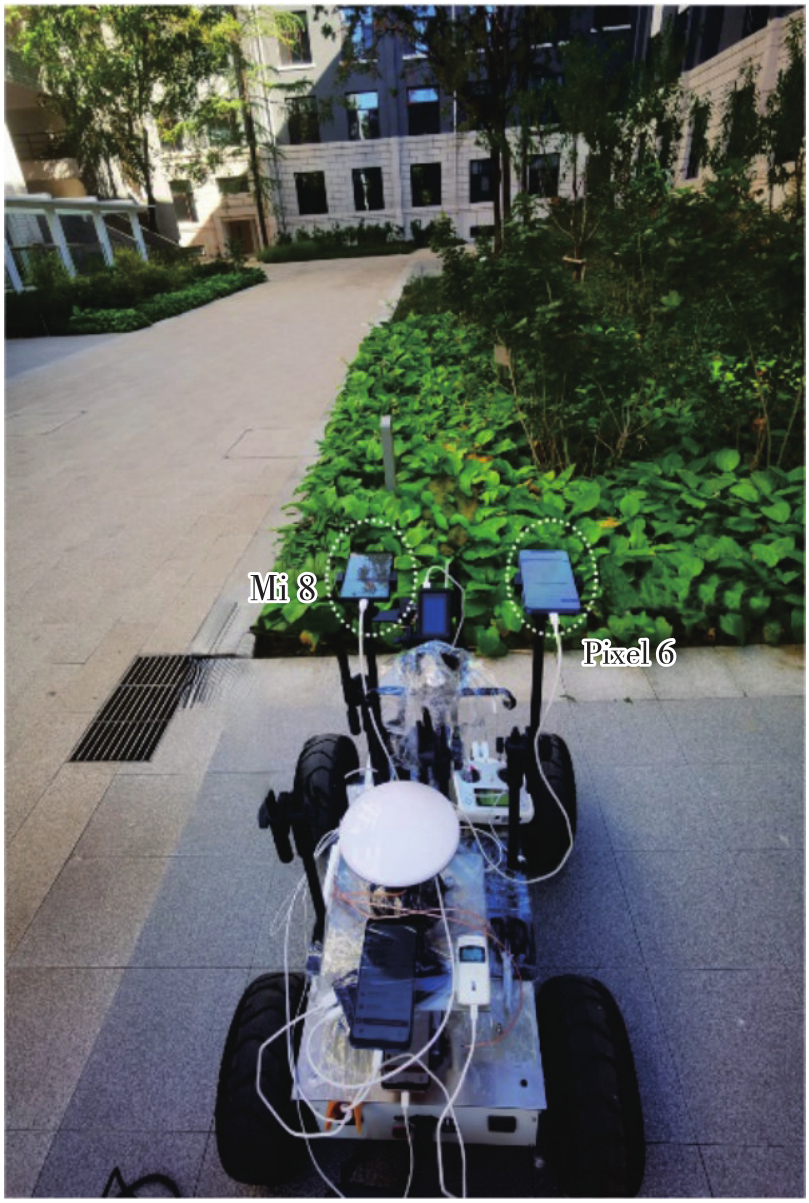
表2
试验设备的芯片类型及其支持的GNSS原始测量信息"
| 设备名称 | 天线 | 系统 | GNSS芯片 | 星座 | 频率 | 载波相位 |
|---|---|---|---|---|---|---|
| Mi 8 | 线极化 | 安卓12 | 博通BCM4775 | G/R/C/E/J | L1,L5 | 支持 |
| Pixel 6 | 线极化 | 安卓13 | 博通BCM4776 | G/R/C/E/J | L1,L5 | 支持 |

图3
动态数据采集路线"
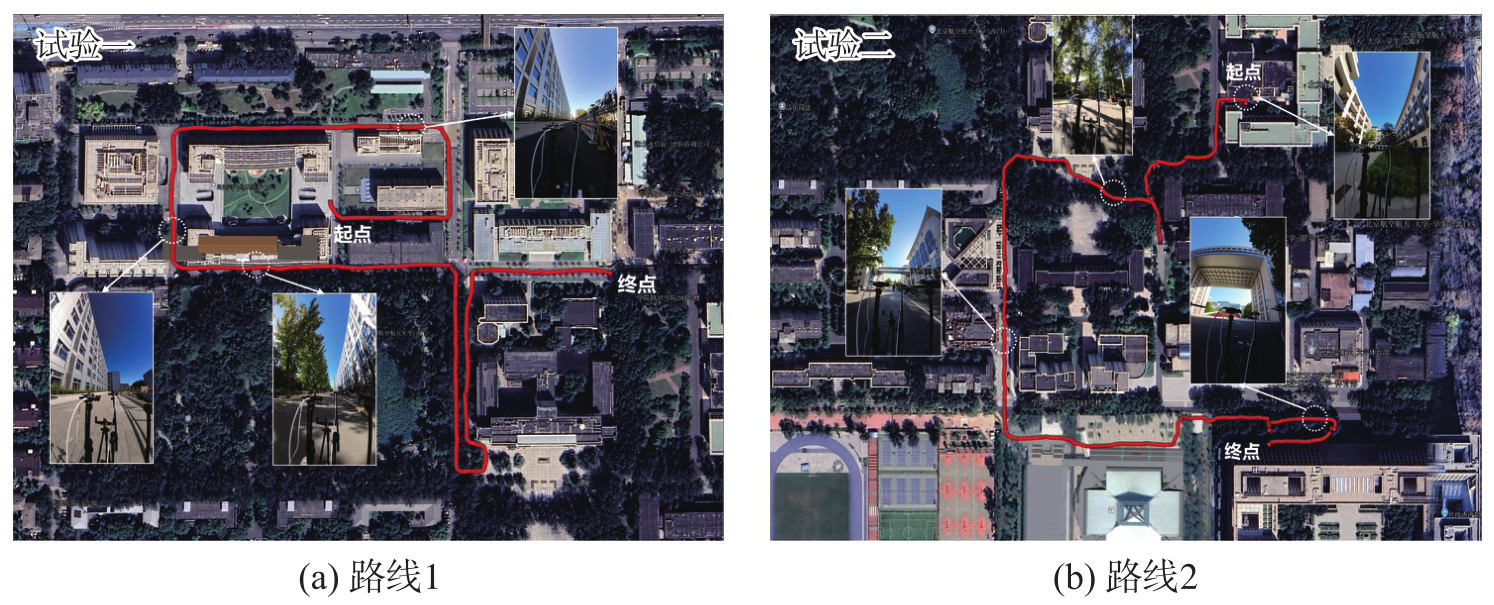
图4
可见卫星数量及PDOP随时间的变化"
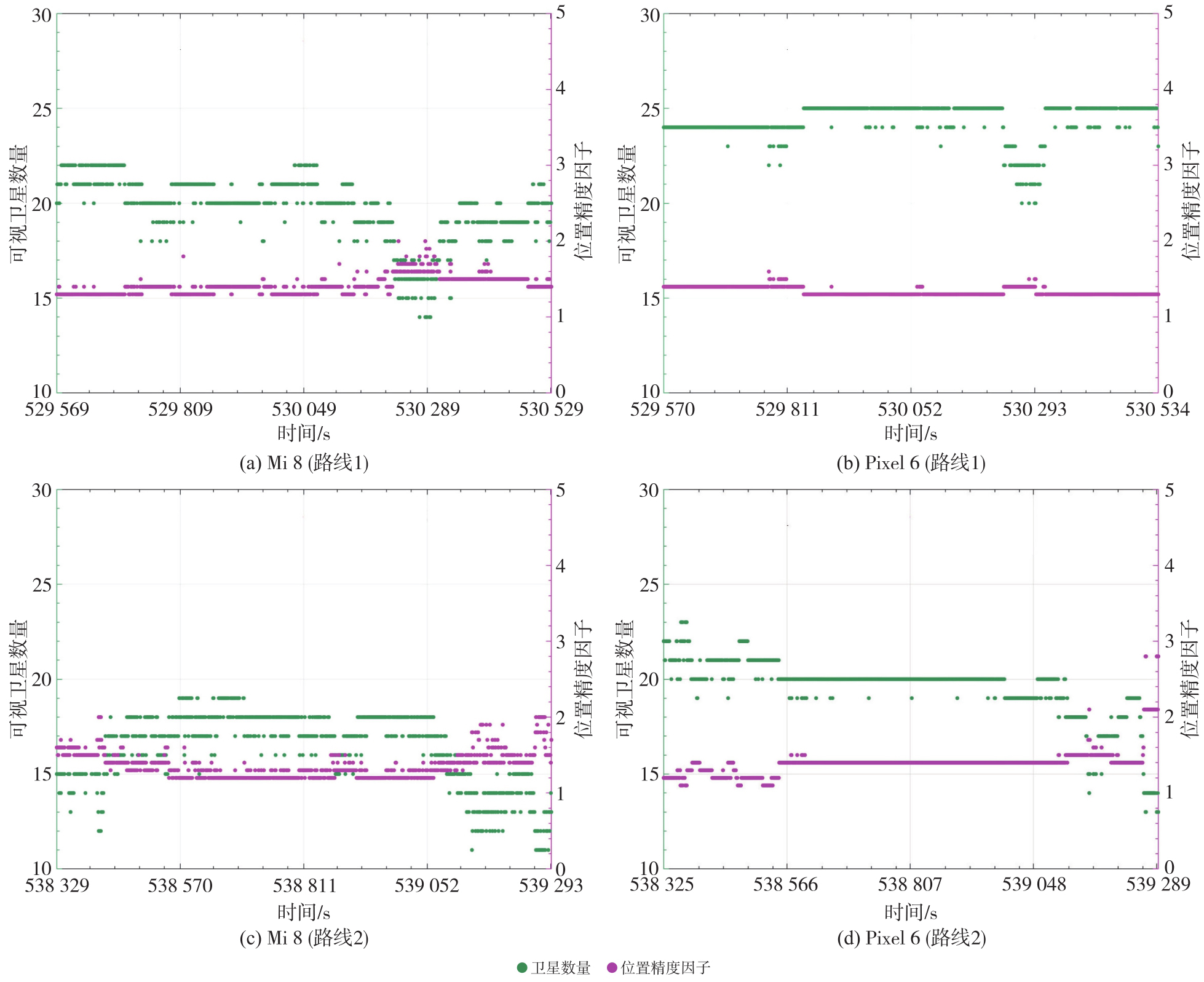
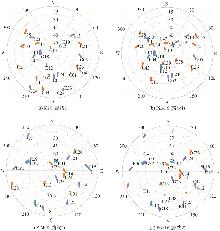
图5
数据集中两款手机的卫星天顶图"
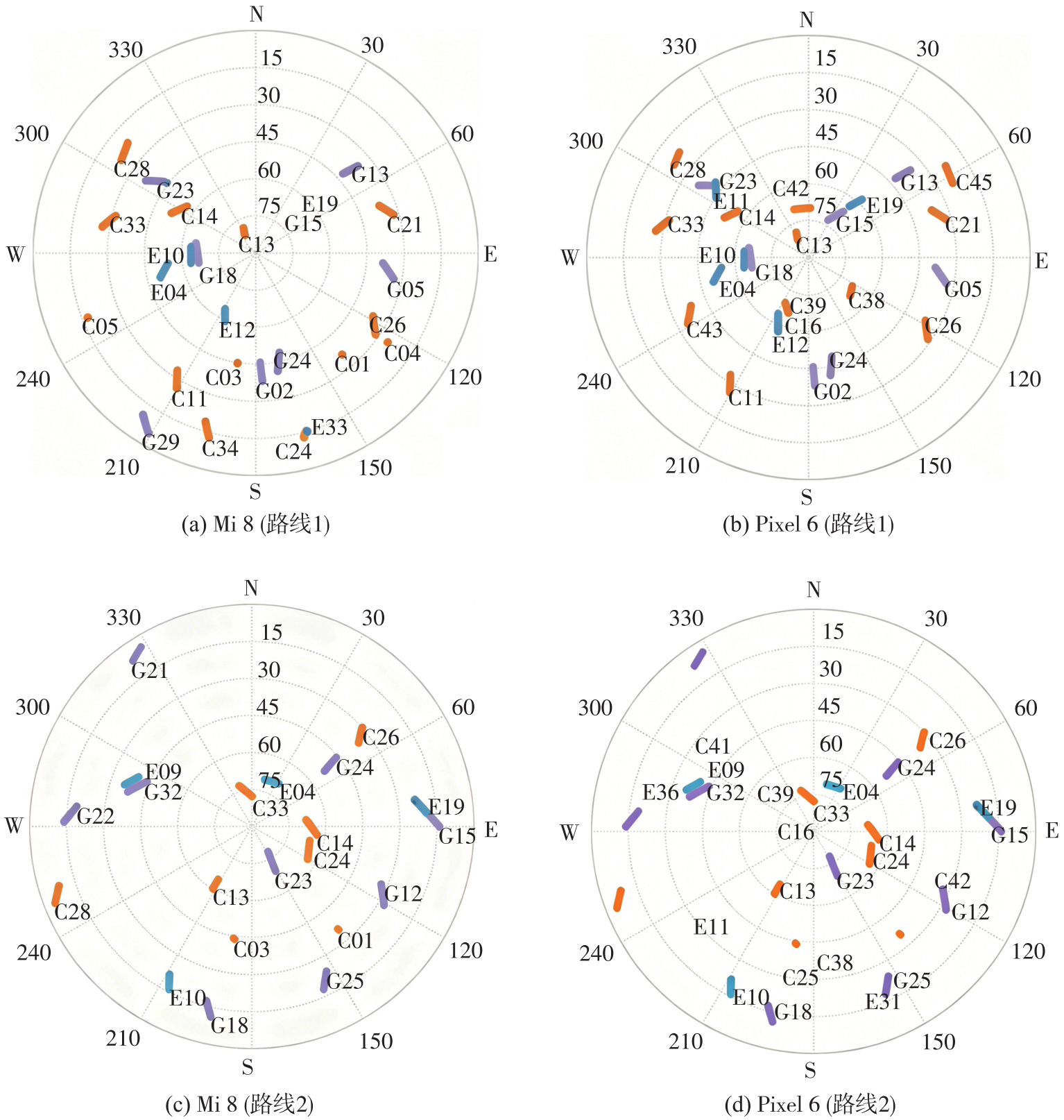
图6
不同卫星的信噪比随时间的变化"
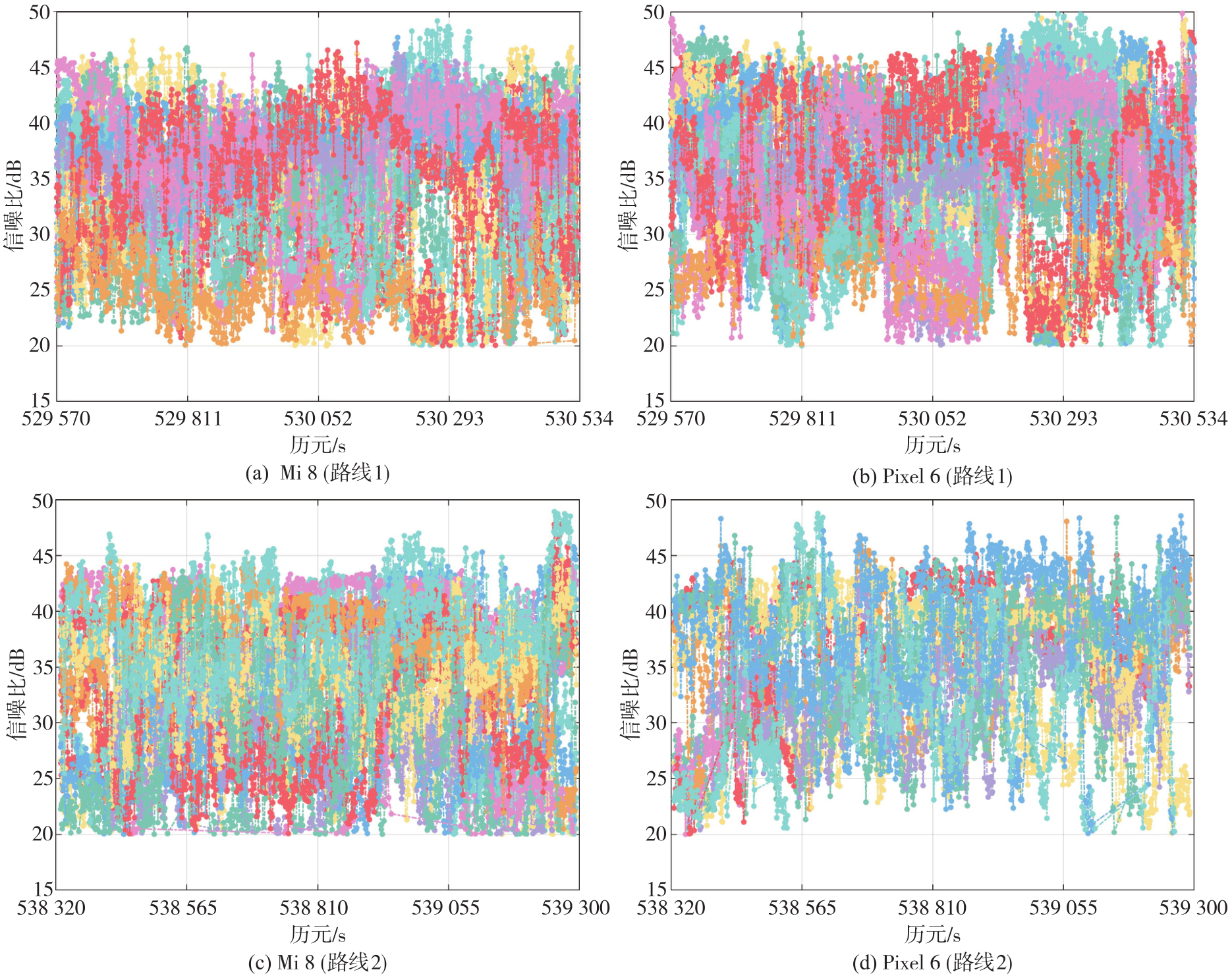

图7
测试集中Mi 8在路线1上的定位精度及轨迹"
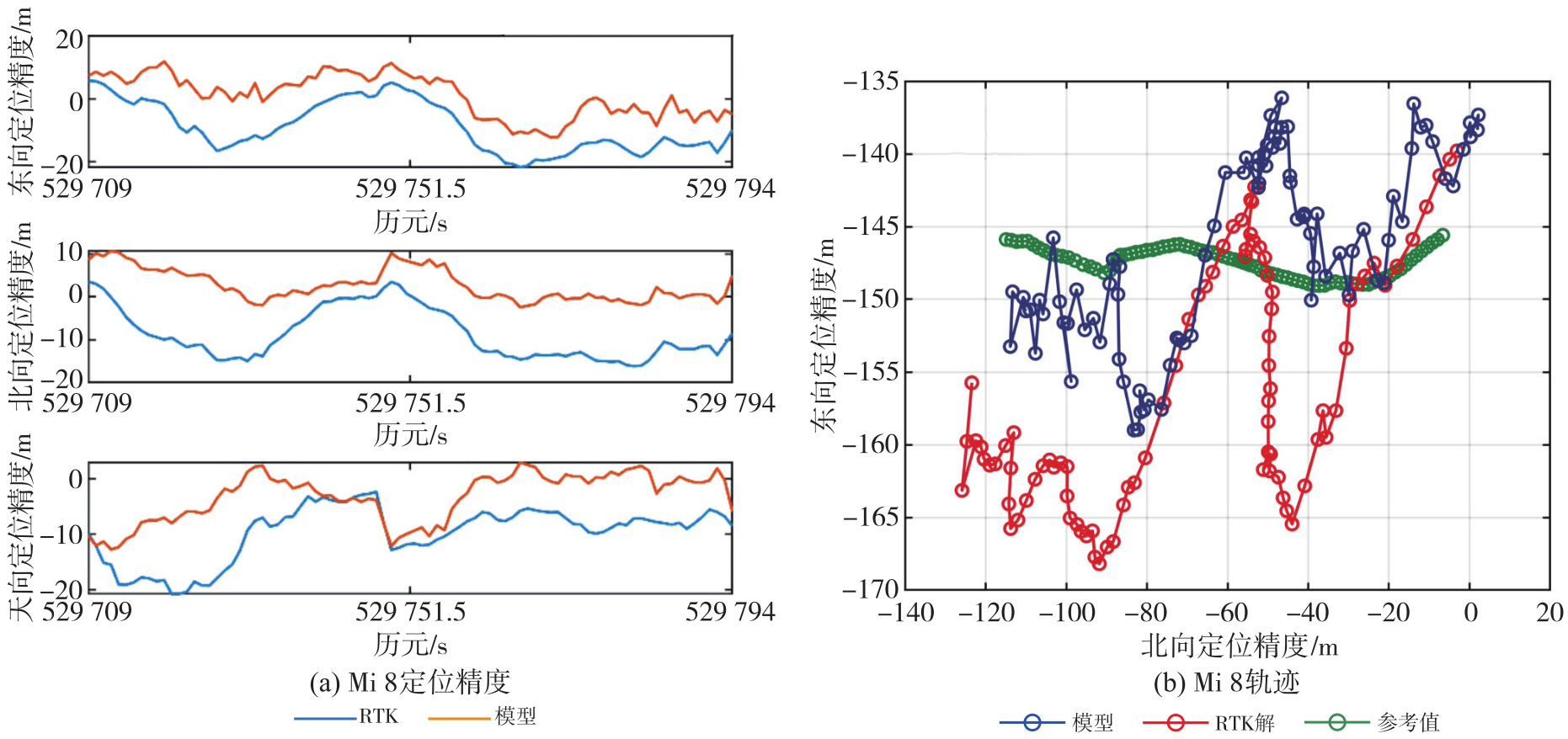

图8
测试集中Pixel 6在路线1上的定位精度及轨迹"
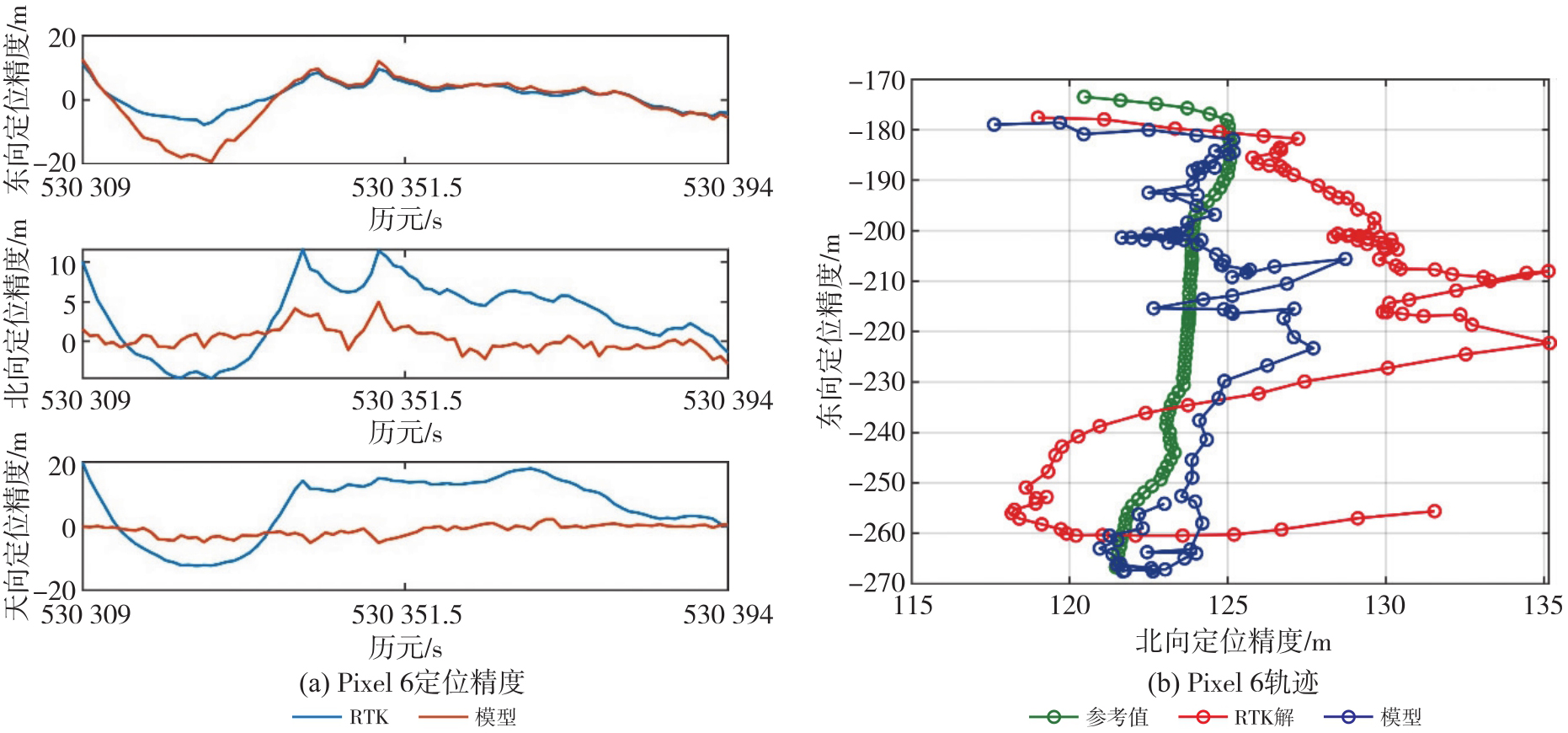
表3
试验设备在路线1测试集上的定位精度"
| 设备 | 指标 | 模型误差 | RTK误差 | ||||
|---|---|---|---|---|---|---|---|
| 北向 | 东向 | 天向 | 北向 | 东向 | 天向 | ||
| Mi 8 | RMS | 4.560 4 | 6.742 3 | 5.438 2 | 10.490 0 | 11.906 2 | 11.012 5 |
| AVE | 2.742 5 | 1.065 1 | -3.270 4 | -8.680 5 | -8.823 9 | -9.829 4 | |
| STD | 3.665 0 | 6.696 7 | 4.370 4 | 5.924 1 | 8.040 4 | 4.994 7 | |
| MAX | 10.700 5 | 12.200 4 | 12.760 0 | 16.160 6 | 21.701 1 | 20.776 4 | |
| Pixel 6 | RMS | 1.460 1 | 7.807 1 | 2.162 7 | 5.423 1 | 4.487 8 | 11.139 5 |
| AVE | 0.275 6 | -0.436 4 | -1.288 3 | 3.317 2 | 1.163 3 | 5.839 5 | |
| STD | 1.442 3 | 7.840 6 | 1.747 3 | 4.315 5 | 4.359 9 | 9.541 9 | |
| MAX | 4.960 7 | 19.192 4 | 5.187 4 | 11.559 0 | 11.098 5 | 19.844 0 | |

图9
测试集中两款手机在路线1上三维定位误差分布"
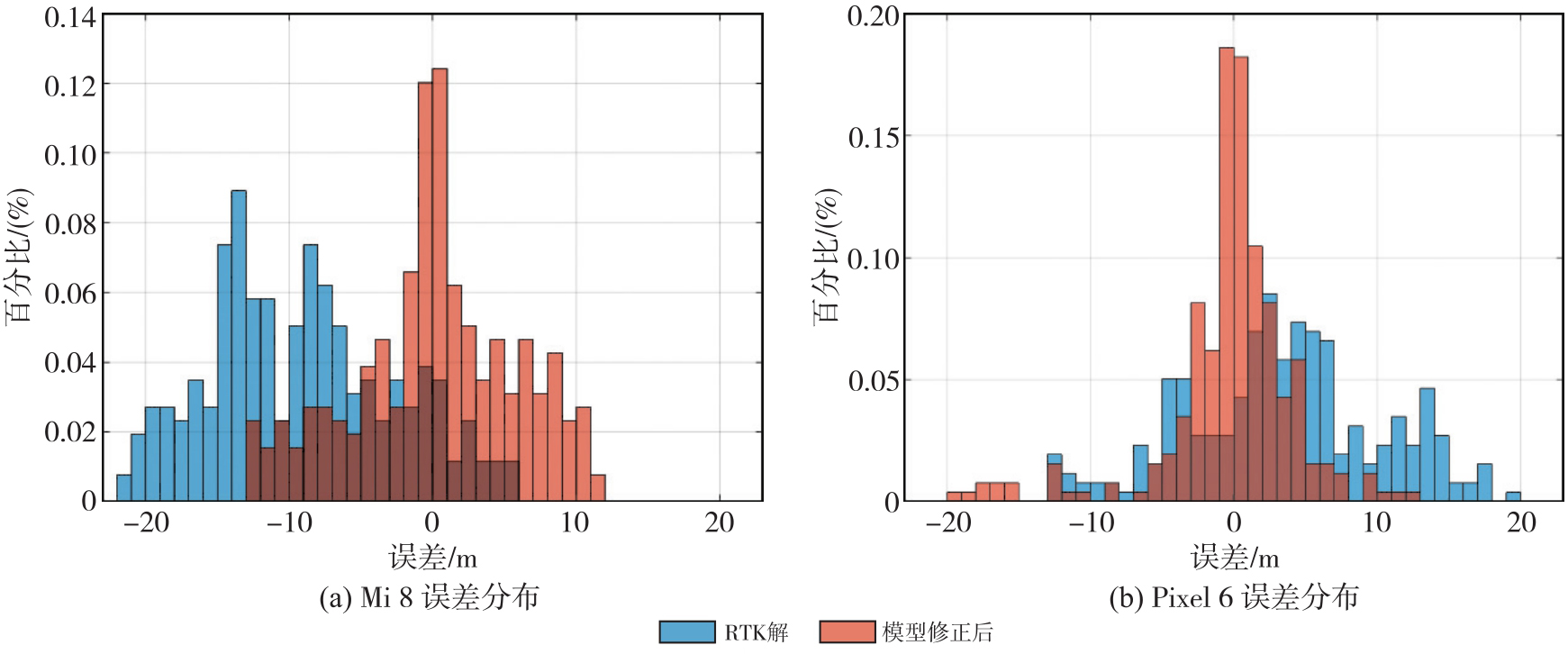

图10
测试集中Mi 8在路线2上的定位精度及轨迹"


图11
测试集中Pixel 6在路线2上的定位精度及轨迹"
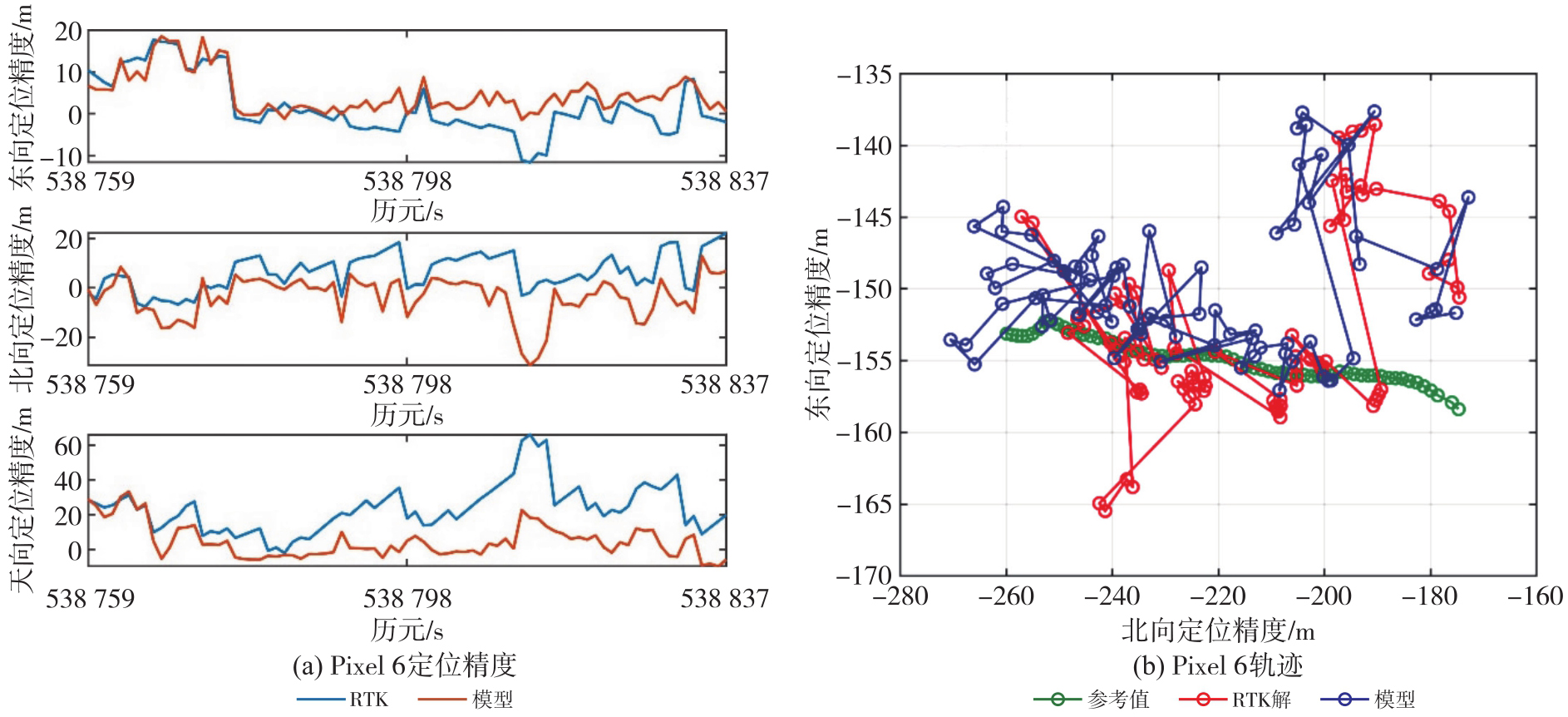
表4
试验设备在路线2测试集上的定位精度"
| 设备 | 指标 | 模型误差 | RTK误差 | ||||
|---|---|---|---|---|---|---|---|
| 北向 | 东向 | 天向 | 北向 | 东向 | 天向 | ||
| Mi 8 | RMS | 5.912 5 | 3.404 0 | 7.050 7 | 10.531 8 | 4.433 0 | 24.622 4 |
| AVE | -2.034 9 | -2.229 1 | 2.426 6 | 1.014 2 | -3.367 4 | 21.002 2 | |
| STD | 5.589 2 | 2.590 2 | 6.665 1 | 10.554 4 | 2.902 7 | 12.939 6 | |
| MAX | 24.639 9 | 11.563 4 | 29.383 3 | 23.696 6 | 13.401 8 | 46.614 2 | |
| Pixel 6 | RMS | 9.164 4 | 6.814 8 | 10.749 7 | 9.812 3 | 7.094 4 | 27.085 3 |
| AVE | -3.633 2 | 4.771 9 | 4.538 0 | 6.469 1 | 1.766 3 | 23.347 4 | |
| STD | 8.467 2 | 4.896 3 | 9.807 1 | 7.424 9 | 6.914 9 | 13.817 6 | |
| MAX | 29.094 4 | 18.462 4 | 33.214 6 | 22.139 8 | 17.663 8 | 66.107 3 | |

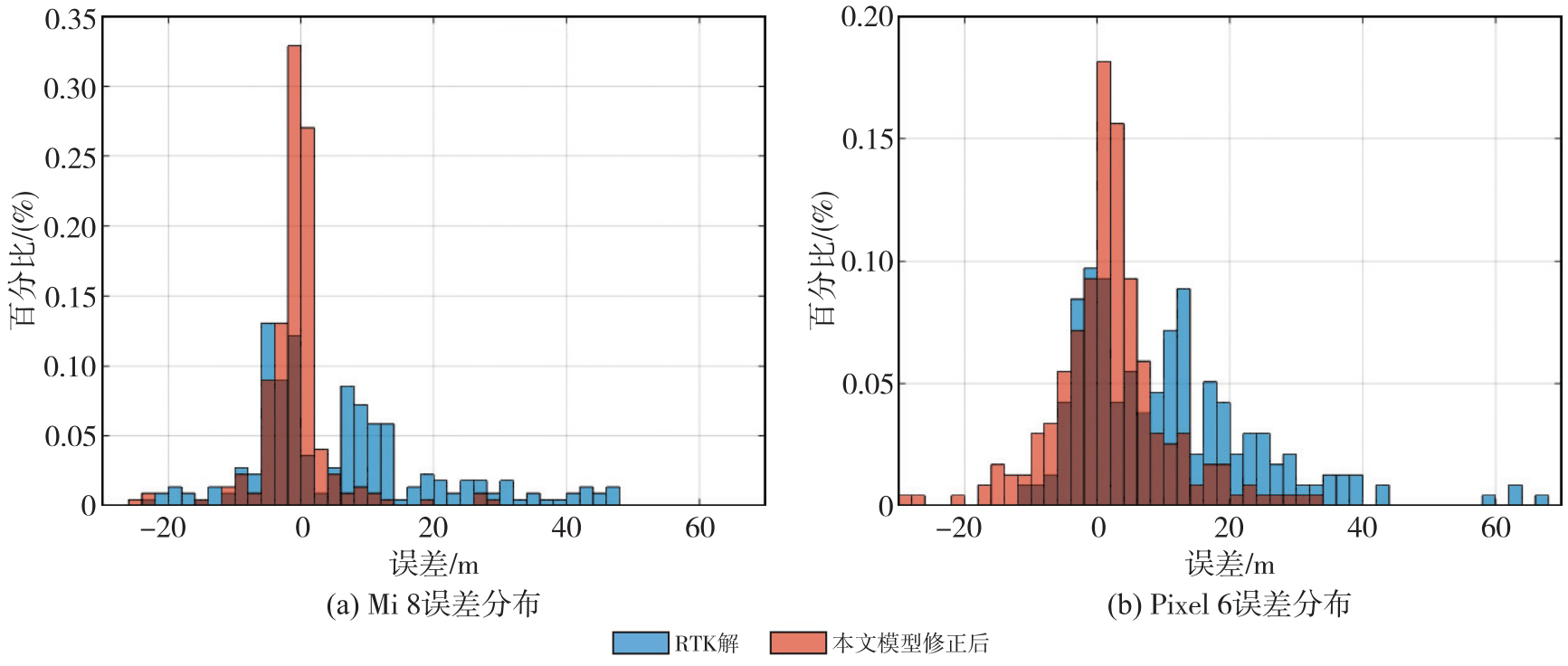
图12
测试集中两款手机在路线2上三维定位误差分布"
| [1] | 毕京学, 甄杰, 郭英. Android手机GPS和A-GPS定位精度分析[J]. 测绘通报, 2016(7): 10-13. |
| BI Jingxue, ZHEN Jie, GUO Ying. Android phone GPS and A-GPS positioning accuracy analysis[J]. Bulletin of Surveying and Mapping, 2016(7): 10-13. | |
| [2] | 王颖喆, 陶贤露, 朱锋, 等. 利用智能手机实现GNSS原始观测值的高精度差分定位[J]. 武汉大学学报(信息科学版), 2021, 46(12): 1941-1950. |
| WANG Yingzhe, TAO Xianlu, ZHU Feng, et al. High-precision differential positioning with GNSS raw observations from smartphones[J]. Geomatics and Information Science of Wuhan University, 2021, 46(12): 1941-1950. | |
| [3] | 袁良雄, 王浩, 申志恒. 基于扩展天线的智能手机GNSS RTK定位性能研究[J]. 全球定位系统, 2023, 48(3): 77-84. |
| YUAN Liangxiong, WANG Hao, SHEN Zhiheng. Research on the GNSS RTK positioning performance of smartphones based on extended antenna[J]. Global Positioning System, 2023, 48(3): 77-84. | |
| [4] | 潘宇明, 丁乐乐, 王震. 安卓手机GNSS信号增强对定位精度的影响分析[J]. 测绘通报, 2022(S2): 43-47. |
| PAN Yuming, DING Lele, WANG Zhen. Analysis of the influence of GNSS signal enhancement on positioning accuracy of Android phones[J]. Bulletin of Surveying and Mapping, 2022(S2): 43-47. | |
| [5] |
高成发, 陈波, 刘永胜. Android智能手机GNSS高精度实时动态定位[J]. 测绘学报, 2021, 50(1): 18-26. DOI: .
doi: 10.11947/j.AGCS.2020.20200107 |
|
GAO Chengfa, CHEN Bo, LIU Yongsheng. Android smartphone GNSS high-precision real-time kinematic positioning[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(1): 18-26. DOI: .
doi: 10.11947/j.AGCS.2020.20200107 |
|
| [6] | TAO X, LIU W, WANG Y, et al. Smartphone RTK positioning with multi-frequency and multi-constellation raw observations: GPS L1/L5, Galileo E1/E5a, BDS B1I/B1C/B2a[J]. Journal of Geodesy, 2023, 97(5): 43. |
| [7] | 李仕辉, 王虎, 马宏阳, 等. 城市环境手机GNSS定位随机模型自适应构建方法[J]. 测绘科学, 2024, 49(3): 8-18. |
| LI Shihui, WANG Hu, MA Hongyang, et al. An adaptive stochastic model construction method for smartphone GNSS positioning in urban environments[J]. Science of Surveying and Mapping, 2024, 49(3): 8-18. | |
| [8] | DENG J, WANG H, WEI S, et al. A stochastic model based on optimal satellite subset selection strategy for smartphone pseudorange relative positioning[J]. Sensors, 2024, 24(8): 2598. |
| [9] | WANG J L, XIA M, ZHANG D, et al. Urban GNSS positioning for consumer electronics: 3D mapping and advanced signal processing[J]. IEEE Transactions on Consumer Electronics, 2025, 71(2): 7059-7072. |
| [10] | 王式太, 张博宇, 殷敏. 基于动态阈值的移动终端GNSS定位阴影匹配算法[J]. 大地测量与地球动力学, 2021, 41(11): 1101-1105. |
| WANG Shitai, ZHANG Boyu, YIN Min. A shadow matching algorithm for GNSS positioning of mobile terminals based on dynamic threshold[J]. Journal of Geodesy and Geodynamics, 2021, 41(11): 1101-1105. | |
| [11] | KIM D, JANG M, LEE K, et al. Application of shadow matching technique to improve smartphone-based global navigation satellite system positioning accuracy[J]. Sensors and Materials, 2022, 34: 383. |
| [12] | GROVES P D. Shadow matching: a new GNSS positioning technique for urban canyons[J]. Journal of Navigation, 2011, 64(3): 417-430. |
| [13] | 冯家昊, 任晓东, 张小红, 等. 一种智能手机GNSS精密定位随机模型构建方法及定位性能分析[J]. 导航定位与授时, 2024, 11(5): 136-144. |
| FENG Jiahao, REN Xiaodong, ZHANG Xiaohong, et al. A method for constructing a stochastic model for smartphone GNSS precise positioning and its performance analysis[J]. Navigation, Positioning and Timing, 2024, 11(5): 136-144. | |
| [14] | HUANG X, LI W, DAI Z, et al. Improving smartphone GNSS positioning in challenging urban environments using GA-BPNN[J]. GPS Solutions, 2024, 29(1): 3. |
| [15] | LIU W, SHI X, ZHU F, et al. Quality analysis of multi-GNSS raw observations and a velocity-aided positioning approach based on smartphones[J]. Advances in Space Research, 2019, 63(8): 2358-2377. |
| [16] | 冷宏宇, 秘金钟, 徐彦田, 等. 智能手机终端RTK定位性能分析[J]. 测绘科学, 2020, 45(12): 15-21. |
| LENG Hongyu, MI Jinzhong, XU Yantian, et al. Performance analysis of smartphone RTK positioning[J]. Science of Surveying and Mapping, 2020, 45(12): 15-21. | |
| [17] | WANG Jiale, ZHEN Fu, HU Yong, et al. Instantaneous sub-meter level precise point positioning of low-cost smartphones[J]. NAVIGATION: Journal of the Institute of Navigation, 2023, 70(4): 597. |
| [18] | ZHANG X, TAO X, ZHU F, et al. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach[J]. GPS Solutions, 2018, 22(3): 70. |
| [19] | HÅKANSSON M. Characterization of GNSS observations from a Nexus 9 Android tablet[J]. GPS Solutions, 2018, 23(1): 21. |
| [20] | 王家乐, 郑福, 施闯, 等. 智能手机GNSS数据质量分析及大气增强PPP精度评估[C]//第十三届中国卫星导航年会论文集. 北京: 中国卫星导航系统管理办公室, 2022: 1-9. |
| WANG Jiale, ZHENG Fu, SHI Chuang, et al. Analysis of smartphone GNSS data quality and accuracy assessment of atmospheric-augmented PPP[C]//Proceedings of the 13th China Satellite Navigation Conference. Beijing: China Satellite Navigation Office, 2022: 1-9. | |
| [21] | VAZQUEZ-ONTIVEROS J R, MARTINEZ-FELIX C A, MELGAREJO-MORALES A, et al. Assessing the quality of raw GNSS observations and 3D positioning performance using the Xiaomi Mi 8 dual-frequency smartphone in Northwest Mexico[J]. Earth Science Informatics, 2024, 17(1): 21-35. |
| [22] | 赵兴旺, 陶安迪, 陈健, 等. 智能手机GNSS数据质量分析与随机模型建立[J]. 大地测量与地球动力学, 2024, 44(7): 661-666. |
| ZHAO Xingwang, TAO Andi, CHEN Jian, et al. Analysis of smartphone GNSS data quality and stochastic model establishment[J]. Journal of Geodesy and Geodynamics, 2024, 44(7): 661-666. | |
| [23] | 徐彦田, 刘巍峰, 李玉星, 等. BDS/GPS/GAL智能手机RTK动态定位算法[J]. 无线电工程, 2023, 53(5): 1061-1067. |
| XU Yantian, LIU Weifeng, LI Yuxing, et al. BDS/GPS/GAL smartphone RTK dynamic positioning algorithm[J]. Radio Engineering, 2023, 53(5): 1061-1067. | |
| [24] | 姚子扬, 尚俊娜, 孙建强, 等. 一种多源融合室内外无缝定位方法[J]. 传感技术学报, 2022, 35(1): 72-83. |
| YAO Ziyang, SHANG Junna, SUN Jianqiang, et al. A multi-source fusion seamless indoor and outdoor positioning method[J]. Journal of Transducer Technology, 2022, 35(1): 72-83. | |
| [25] | WANG J L, XIA M, XIE Y, et al. Multimodal sensor fusion-based lightweight pedestrian wearable system for continuous health monitoring and location tracking[J]. IEEE Sensors Journal, 2025, 26(10): 14558-14575. |
| [26] | PAZIEWSKI J, FORTUNATO M, MAZZONI A, et al. An analysis of multi-GNSS observations tracked by recent Android smartphones and smartphone-only relative positioning results[J]. Measurement. 2021, 175: 109162. |
| [27] | LI Xingxing, ZHANG Xiaohong, NIU Xiaoji, et al. Progress and achievements of multi-sensor fusion navigation in China during 2019—2023[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 102-114. |
| [28] | JADERBERG M, SIMONYAN K, ZISSERMAN A. Spatial transformer networks[J]. Advances in Neural Information Processing Systems, 2015, 28. |
| [29] | ZHU X, CHENG D, ZHANG Z, et al. An empirical study of spatial attention mechanisms in deep networks[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 6688-6697. |
| [30] | WANG Jiale, SHI Chuang, ZHENG Fu, et al. Multi-frequency smartphone positioning performance evaluation: insights into A-GNSS PPP-B2b services and beyond[J]. Satellite Navigation, 2024, 5(1): 25. |
| [31] | YAN D, LI T, JIANG H, et al. PS-VINS: a visual-inertial SLAM system with pedestrian gait and structural constraints using smartphone sensors[J]. IEEE Sensors Journal, 2024, 24(5): 6777-6791. |
| [32] | WANG Jiale, SHI Chuang, XIA Ming, et al. Seamless indoor-outdoor foot-mounted inertial pedestrian positioning system enhanced by smartphone PPP/3-D Map/Barometer[J]. IEEE Internet of Things Journal, 2024, 11(7): 13051-13069. |
| [33] | LI Guangcai, GENG Jianghui. Characteristics of raw multi-GNSS measurement error from Google Android smart devices[J]. GPS solutions, 2019, 23(3): 90. |
| [1] | 李博峰, 章浙涛. 非模型化误差实时处理:探测、补偿及控制[J]. 测绘学报, 2026, 55(5): 776-786. |
| [2] | 耿江辉, 王锋. 多源传感器“盲插即用”的组件化PNT融合框架、原理及试验验证[J]. 测绘学报, 2026, 55(5): 787-797. |
| [3] | 朱锋, 廖元木, 周瑞, 张小红. 多传感器融合导航中的连续时间状态估计方法[J]. 测绘学报, 2026, 55(5): 798-808. |
| [4] | 姚凌寒, 徐天河, 丛阳滋, 张震, 邢建平. 基于IESRKF的LiDAR/UWB/INS多源传感器紧耦合模型[J]. 测绘学报, 2026, 55(5): 809-825. |
| [5] | 冯腾飞. 华北水储量变化与非构造形变的GRACE多源数据处理及信号分析[J]. 测绘学报, 2026, 55(5): 943-943. |
| [6] | 李贤炮. 联合GNSS和GRACE/GFO数据反演陆地水储量变化方法及应用[J]. 测绘学报, 2026, 55(5): 944-944. |
| [7] | 洪菊. GNSS精密单点定位增强技术研究[J]. 测绘学报, 2026, 55(5): 945-945. |
| [8] | 周洁. 基于多源异构数据的城市新老城区地震应急避难场所空间适宜性比较研究[J]. 测绘学报, 2026, 55(5): 949-949. |
| [9] | 祝程程, 李真, 郭金运, 周茂盛, 李婉秋. 基于限定区域的纬度做差法解算宽刈幅测高数据交叉点位置[J]. 测绘学报, 2026, 55(4): 673-683. |
| [10] | 杨小磊, 肖云, 杨丽清, 洪晓东, 郭恩泽, 王翰. 时变重力场反演的改进基线法[J]. 测绘学报, 2026, 55(4): 708-720. |
| [11] | 李洋, 黄海军, 刘素兰, 吴晓辉, 刘琦, 庞琪沛, 吴云龙. 鄱阳湖流域未来百年陆地水储量异常预测及干旱风险评估:基于CMIP6驱动的Transformer-GRU模型[J]. 测绘学报, 2026, 55(4): 721-738. |
| [12] | 杨先圣. 高可用可见光智能定位技术研究[J]. 测绘学报, 2026, 55(4): 753-753. |
| [13] | 耿继军. 基于智能手机多传感器融合的行人室内外定位研究[J]. 测绘学报, 2026, 55(4): 754-754. |
| [14] | 马宏阳. 对流层模型增强的PPP-AR理论方法及在机载导航中的应用研究[J]. 测绘学报, 2026, 55(4): 756-756. |
| [15] | 刘航. 联合地基GNSS和星载GNSS-R的低纬电离层闪烁监测及预报方法研究[J]. 测绘学报, 2026, 55(4): 758-758. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||