


测绘学报 ›› 2024, Vol. 53 ›› Issue (6): 999-1012.doi: 10.11947/j.AGCS.2024.20230389
闫利1,2( ), 赵英豪3, 戴集成1, 徐博1, 谢洪1,2(), 周玉泉1,2
), 赵英豪3, 戴集成1, 徐博1, 谢洪1,2(), 周玉泉1,2
收稿日期:2023-09-06
发布日期:2024-07-22
通讯作者:
谢洪
E-mail:lyan@sgg.whu.edu.cn;hxie@sgg.whu.edu.cn
作者简介:闫利(1966—),男,教授,博士生导师,研究方向为摄影测量、遥感和三维激光扫描技术。 E-mail:lyan@sgg.whu.edu.cn
基金资助:
Li YAN1,2(), Yinghao ZHAO3, Jicheng DAI1, Bo XU1, Hong XIE1,2(), Yuquan ZHOU1,2
Received:2023-09-06
Published:2024-07-22
Contact:
Hong XIE
E-mail:lyan@sgg.whu.edu.cn;hxie@sgg.whu.edu.cn
About author:YAN Li (1966—), male, professor, PhD supervisor, majors in photogrammetry, remote sensing and LiDAR. E-mail: lyan@sgg.whu.edu.cn
Supported by:摘要:
智能化测绘的发展对数据采集高效性、完备性和智能性提出了更高的要求。尤其是在林下等GNSS拒止环境下,现有传统手段往往难以完成高效率、高覆盖率测量。为了满足未知环境的智能化感知测量需求,以无人机为移动平台,本文设计并提出了一种融合视觉在线自主定位及全局探测路径规划的自主无人机智能感知测量技术与总体框架。本文首先设计并采用了一种基于点线特征的VIO(visual-inertial odometry)在线定位算法,通过点线特征的提取和匹配进行初始位姿的解算,之后利用因子图优化实时地输出无人机高精度的位姿信息。进一步地,为了实现无人机对于未知环境高效且高覆盖率的自主测量,采用了一种顾及多层次信息的全局最优探测路径规划方法确定局部最佳探测目标,然后通过轨迹搜索和优化算法实时地生成高质量的探测运动轨迹。通过自主搭建无人机平台对该技术框架进行了验证,分步对比和总体真实试验表明框架设计并采用的定位及空间探测方法相较于目前具有代表性的方法具有明显优势,并且在GNSS拒止局部林下环境中实现了高效高覆盖率的全自主测量,为未知场景进一步的在线智能化感知奠定了良好的理论方法与框架基础。
中图分类号:
闫利, 赵英豪, 戴集成, 徐博, 谢洪, 周玉泉. 面向未知环境的自主无人机智能感知测量技术[J]. 测绘学报, 2024, 53(6): 999-1012.
Li YAN, Yinghao ZHAO, Jicheng DAI, Bo XU, Hong XIE, Yuquan ZHOU. Intelligent perception measurement technology of autonomous UAV for unknown environment[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 999-1012.
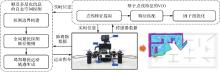
图1
自主无人机智能感知测量技术与框架"
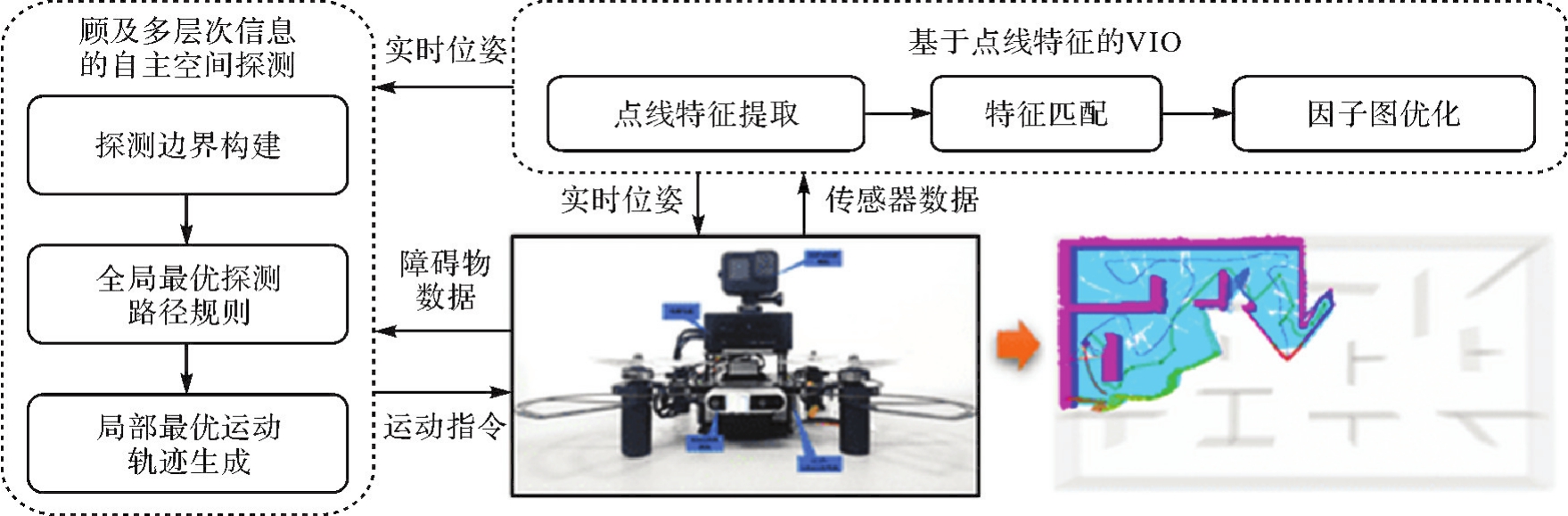

图2
基于点线特征的VIO算法整体流程"
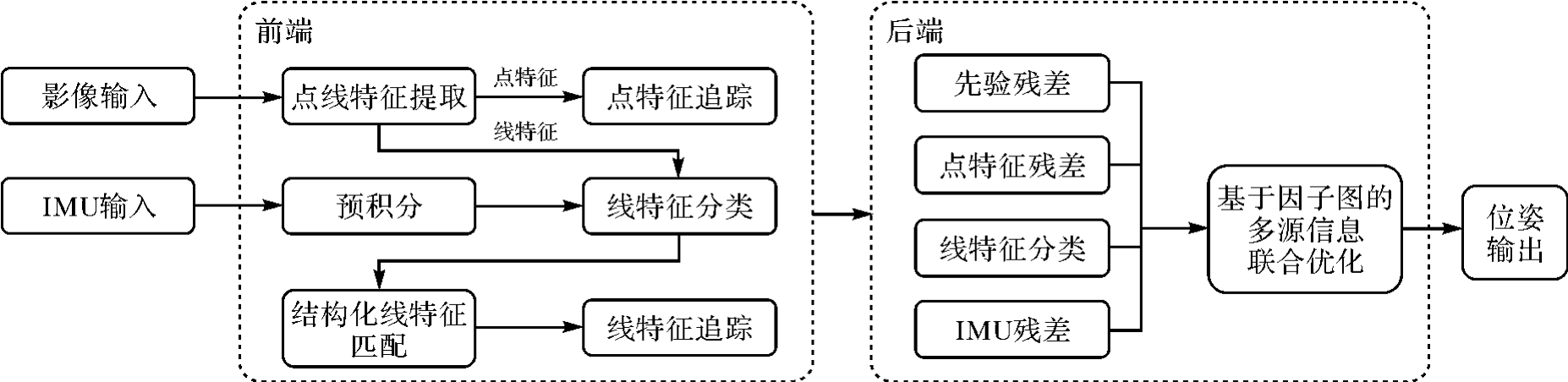

图3
基于LSD算法的直线特征提取结果融合前后对比"

图4
基于光流法的直线特征匹配结果示例"


图5
基于点线特征的VIO系统优化模型"

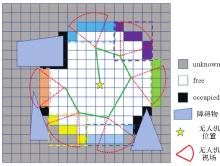
图6
全局最优探测路径规划"

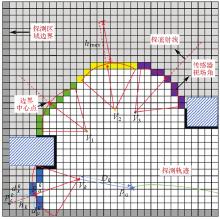
图7
边界空间特征评估"

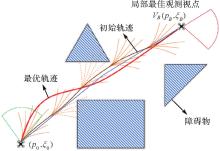
图8
运动轨迹搜索与优化"

表1
不同VIO算法轨迹平移误差RMSE对比结果"
| 数据序列 | OKVIS-Mono | VINS-Mono | PL-VIO | PL-SLAM | 本文算法 |
|---|---|---|---|---|---|
| MH_01_easy | 29.5 | 14.8 | 20.1 | 15.7 | 11.1 |
| MH_02_easy | 30.7 | 17.1 | 13.1 | 14.2 | 9.3 |
| MH_03_medium | 33.4 | 19.4 | 26.1 | 14.7 | 15.7 |
| MH_04_difficult | 38.9 | 34.6 | 35.8 | 12.4 | 17.1 |
| MH_05_difficult | 46.7 | 29.2 | 24.4 | 55.5 | 14.4 |
| V1_02_medium | 22.2 | 7.9 | 17.0 | 16.9 | 8.9 |
| V1_03_difficult | 28.1 | 20.7 | 27.0 | 42.0 | 14.3 |
| V2_01_easy | 14.0 | 8.2 | 9.3 | 19.4 | 7.4 |
| V2_02_medium | 21.1 | 15.7 | 12.3 | 25.2 | 12.2 |
表2
不同VIO算法轨迹旋转误差RMSE对比结果"
| 数据序列 | OKVIS-Mono | VINS-Mono | PL-VIO | PL-SLAM | 本文算法 |
|---|---|---|---|---|---|
| MH_01_easy | 3.2 | 2.0 | 1.6 | 6.0 | 1.6 |
| MH_02_easy | 3.9 | 2.3 | 1.7 | 2.5 | 0.9 |
| MH_03_medium | 3.3 | 1.6 | 1.7 | 3.4 | 0.8 |
| MH_04_difficult | 2.3 | 1.5 | 1.6 | 6.8 | 1.4 |
| MH_05_difficult | 2.4 | 0.7 | 1.1 | 9.9 | 0.7 |
| V1_02_medium | 6.0 | 2.6 | 3.2 | 5.6 | 1.5 |
| V1_03_difficult | 8.1 | 6.2 | 3.4 | 9.1 | 4.2 |
| V2_01_easy | 2.2 | 2.0 | 2.2 | 2.3 | 2.3 |
| V2_02_medium | 4.9 | 4.3 | 2.9 | 4.6 | 1.7 |

图9
MH_05_difficult数据序列平移精度对比结果"
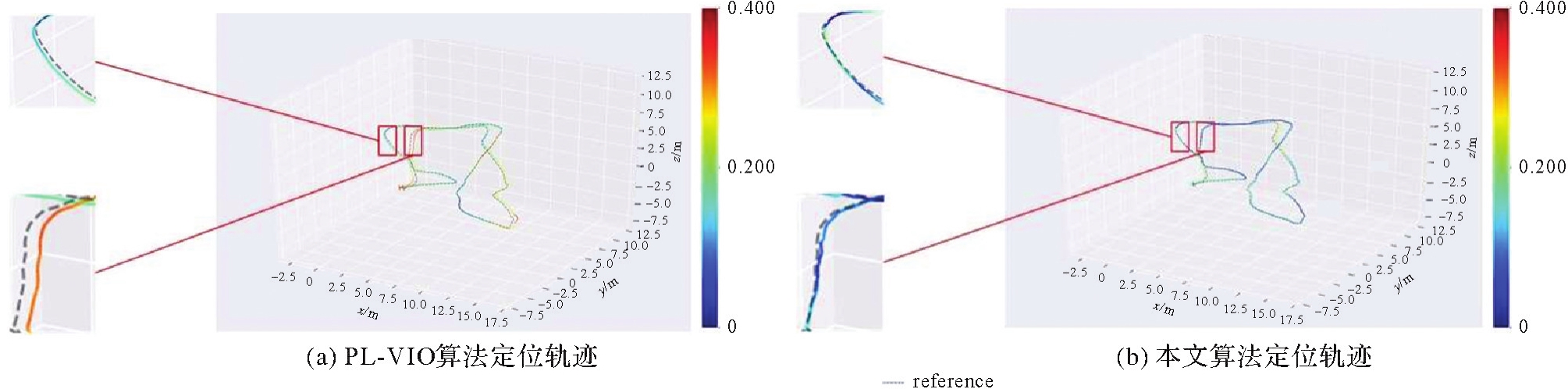
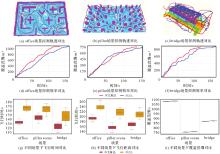
图10
不同场景下的探测效能对比"

表3
不同场景下的探测试验结果"
| 场景 | 方法 | 探索耗时/s | 飞行距离/m | 覆盖范围/m3 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Avg | Min | Std | Avg | Min | Std | Avg | Min | Std | ||
| office | FUEL | 167.5 | 156.7 | 8.0 | 239.0 | 225.5 | 11.9 | 1 082.2 | 1 079.6 | 2.0 |
| 本文算法 | 133.2 | 127.4 | 4.3 | 193.8 | 177.9 | 8.2 | 1 077.7 | 1 075.5 | 2.0 | |
| pillar | FUEL | 163.6 | 147.0 | 9.1 | 215.8 | 189.7 | 14.8 | 756.8 | 753.0 | 1.8 |
| 本文算法 | 142.3 | 130.2 | 7.7 | 156.7 | 136.0 | 11.3 | 752.3 | 748.9 | 2.0 | |
| bridge | FUEL | 146.2 | 126.1 | 13.8 | 208.5 | 186.8 | 14.5 | 871.6 | 868.7 | 1.6 |
| 本文算法 | 122.4 | 109.8 | 7.3 | 167.7 | 146.7 | 10.6 | 867.4 | 865.4 | 1.6 | |

图11
自主无人机硬件平台"
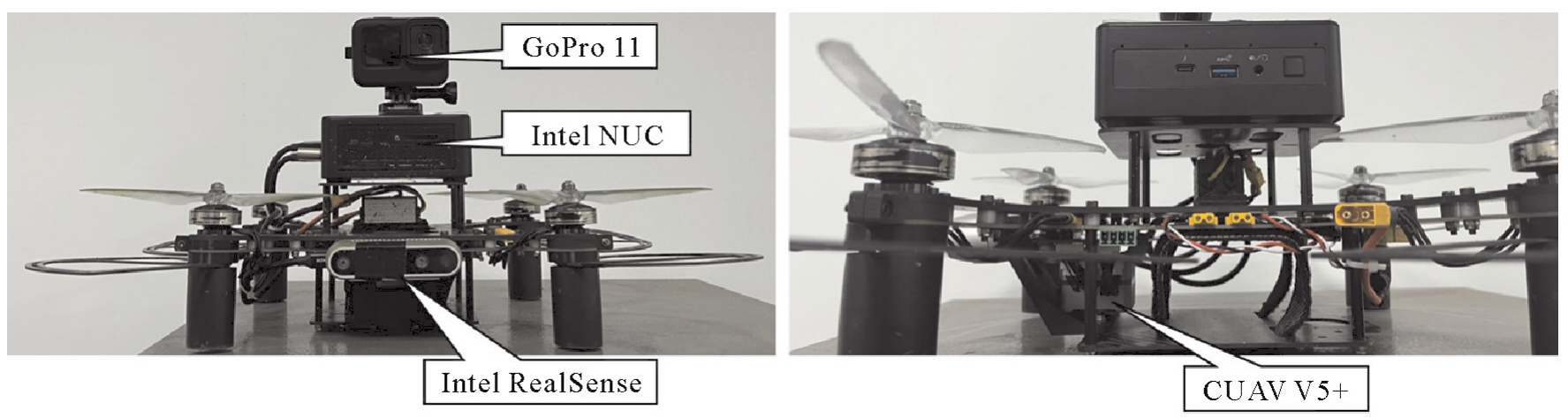
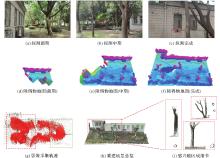
图12
室外未知场景自主感知测量过程及重建结果"

| [1] | 陈军, 刘万增, 武昊, 等. 智能化测绘的基本问题与发展方向[J]. 测绘学报, 2021, 50(8):995-1005. DOI:10.11947/j.AGCS.2021.20210235. DOI:10.11947/j.AGCS.2021.20210235. |
| CHEN Jun, LIU Wanzeng, WU Hao, et al. Smart surveying and mapping: fundamental issues and research agenda[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(8):995-1005. DOI:10.11947/j.AGCS.2021.20210235. DOI:10.11947/j.AGCS.2021.20210235. | |
| [2] | 陈军, 武昊, 刘万增, 等. 自然资源时空信息的技术内涵与研究方向[J]. 测绘学报, 2022, 51(7):1130-1140. DOI:10.11947/j.AGCS.2022.20210643. |
| CHEN Jun, WU Hao, LIU Wanzeng, et al. Technical connotation and research agenda of natural resources spatio-temporal information[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(7):1130-1140. DOI:10.11947/j.AGCS.2022.20210643. | |
| [3] | CHEN Chen, LI Zhilin, LI Songnian, et al. From digitalized to intelligentized surveying and mapping: fundamental issues and research agenda[J]. Journal of Geodesy and Geoinformation Science, 2022, 5(2):148-160. |
| [4] | 郭庆华, 胡天宇, 刘瑾, 等. 轻小型无人机遥感及其行业应用进展[J]. 地理科学进展, 2021, 40(9):1550-1569. |
| GUO Qinghua, HU Tianyu, LIU Jin, et al. Advances in light weight unmanned aerial vehicle remote sensing and major industrial applications[J]. Progress in Geography, 2021, 40(9):1550-1569. | |
| [5] | 闫利, 陈宇, 谢洪, 等. 测量机器人的关键技术[J]. 测绘学报, 2021, 50(9):1159-1169. DOI:10.11947/j.AGCS.2021.20210090. |
| YAN Li, CHEN Yu, XIE Hong, et al. Surveying robot and its key technology[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(9):1159-1169. DOI:10.11947/j.AGCS.2021.20210090. | |
| [6] | HE Yijia, XU Bo, OUYANG Zhanpeng, et al. A rotation-translation-decoupled solution for robust and efficient visual-inertial initialization[C]//Proceedings of 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 739-748. |
| [7] | LIN H Y, ZHAN Jiarong. GNSS-denied UAV indoor navigation with UWB incorporated visual inertial odometry[J]. Measurement, 2023, 206:112256. |
| [8] | DUAN Ran, PAUDEL D P, FU Changhong, et al. Stereo orientation prior for UAV robust and accurate visual odometry[J]. ASME Transactions on Mechatronics, 2022, 27(5):3440-3450. |
| [9] | DI Kaichang, WAN Wenhui, ZHAO Hongying, et al. Progress and applications of visual SLAM[J]. Journal of Geodesy and Geoinformation Science, 2019, 2(2):38-49. |
| [10] | BARTOLOMEI L, TEIXEIRA L, CHLI M. Perception-aware path planning for UAVs using semantic segmentation[C]//Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 5808-5815. |
| [11] | LEE E M, CHOI J, LIM H, et al. REAL: rapid exploration with active loop-closing toward large-scale 3D mapping using UAVs[C]//Proceedings of 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems. [S.l.]: ACM Press, 2021: 4194-4198. |
| [12] | ZHOU Quan, REDDING C J, QI Hairong, et al. Agile path planning for radiation source searching with aerial drones[C]//Proceedings of 2021 IEEE Nuclear Science Symposium and Medical Imaging Conference. Piscataway: IEEE, 2021: 1-2. |
| [13] | QIN Tong, LI Peiliang, SHEN Shaojie. VINS-mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4):1004-1020. |
| [14] | STEENBEEK A, NEX F. CNN-based dense monocular visual SLAM for real-time UAV exploration in emergency conditions[J]. Drones, 2022, 6(3):79. |
| [15] | RHODES C, LIU Cunjia, CHEN Wenhua. Autonomous source term estimation in unknown environments: from a dual control concept to UAV deployment[J]. IEEE Robotics and Automation Letters, 2022, 7(2):2274-2281. |
| [16] | MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5):1255-1262. |
| [17] | CAMPOS C, ELVIRA R, RODRIGUEZ J J G, et al. ORB-SLAM3: an accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6):1874-1890. |
| [18] | SUN Ke, MOHTA K, PFROMMER B, et al. Robust stereo visual inertial odometry for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2018, 3(2):965-972. |
| [19] | SUMIKURA S, SHIBUYA M, SAKURADA K. OpenVSLAM: a versatile visual SLAM framework[C]//Proceedings of the 27th ACM International Conference on Multimedia. Nice: ACM Press, 2019: 2292-2295. |
| [20] | BLOESCH M, OMARI S, HUTTER M, et al. Robust visual inertial odometry using a direct EKF-based approach[C]//Proceedings of 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). [S.l.]: ACM Press, 2015: 298-304. |
| [21] | ROSINOL A, ABATE M, CHANG Yun, et al. Kimera: an open-source library for real-time metric-semantic localization and mapping[C]//Proceedings of 2020 IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 1689-1696. |
| [22] | 王晨捷, 罗斌, 李成源, 等. 无人机视觉SLAM协同建图与导航[J]. 测绘学报, 2020, 49(6):767-776. DOI:10.11947/j.AGCS.2020.20190145. |
| WANG Chenjie, LUO Bin, LI Chengyuan, et al. The collaborative mapping and navigation based on visual SLAM in UAV platform[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(6):767-776. DOI:10.11947/j.AGCS.2020.20190145. | |
| [23] | GOMEZ-OJEDA R, MORENO F A, ZUNIGA-NOEL D, et al. PL-SLAM: a stereo SLAM system through the combination of points and line segments[J]. IEEE Transactions on Robotics, 2019, 35(3):734-746. |
| [24] | GOMEZ-OJEDA R, BRIALES J, GONZALEZ-JIMENEZ J. PL-SVO: semi-direct monocular visual odometry by combining points and line segments[C]//Proceedings of 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). [S.l.]: ACM Press, 2016: 4211-4216. |
| [25] | ZHOU Lipu, WANG Shengze, KAESS M. DPLVO: direct point-line monocular visual odometry[J]. IEEE Robotics and Automation Letters, 2021, 6(4):7113-7120. |
| [26] | ZHAO Yinghao, YAN Li, DAI Jicheng, et al. Robust planning system for fast autonomous flight in complex unknown environment using sparse directed frontier points[J]. Drones, 2023, 7(3):219. |
| [27] | BIRCHER A, KAMEL M, ALEXIS K, et al. Receding horizon “next-best-view” planner for 3D exploration[C]//Proceedings of 2016 IEEE International Conference on Robotics and Automation (ICRA). Sweden: IEEE, 2016: 1462-1468. |
| [28] | WITTING C, FEHR M, BEHNEMANN R, et al. History-aware autonomous exploration in confined environments using MAVs[C]//Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid: IEEE, 2018: 1-9. |
| [29] | SELIN M, TIGER M, DUBERG D, et al. Efficient autonomous exploration planning of large-scale 3D environments[J]. IEEE Robotics and Automation Letters, 2019, 4(2):1699-1706. |
| [30] | WANG Chaoqun, ZHU Delong, LI Teng, et al. Efficient autonomous robotic exploration with semantic road map in indoor environments[J]. IEEE Robotics and Automation Letters, 2019, 4(3):2989-2996. |
| [31] | BATINOVIC A, IVANOVIC A, PETROVIC T, et al. A shadow casting-based next-best-view planner for autonomous 3D exploration[J]. IEEE Robotics and Automation Letters, 2022, 7(2):2969-2976. |
| [32] | DUBERG D, JENSFELT P. UFOExplorer: fast and scalable sampling-based exploration with a graph-based planning structure[J]. IEEE Robotics and Automation Letters, 2022, 7(2):2487-2494. |
| [33] | NAAZARE M, ROSAS F G, SCHULZ D. Online next-best-view planner for 3D-exploration and inspection with a mobile manipulator robot[J]. IEEE Robotics and Automation Letters, 2022, 7(2):3779-3786. |
| [34] | RESPALL V M, DEVITT D, FEDORENKO R, et al. Fast sampling-based next-best-view exploration algorithm for a MAV[C]//Proceedings of 2021 IEEE International Conference on Robotics and Automation. Xi'an: IEEE, 2021: 89-95. |
| [35] | YAMAUCHI B. A frontier-based approach for autonomous exploration[C]//Proceedings of 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation. Monterey: IEEE, 1997. |
| [36] | ZHOU Boyu, ZHANG Yichen, CHEN Xinyi, et al. FUEL: fast UAV exploration using incremental frontier structure and hierarchical planning[J]. IEEE Robotics and Automation Letters, 2021, 6(2):779-786. |
| [37] | CIESLEWSKI T, KAUFMANN E, SCARAMUZZA D. Rapid exploration with multi-rotors: a frontier selection method for high speed flight[C]//Proceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. [S.l.]: ACM Press, 2017: 2135-2142. |
| [38] | SHI Jianbo, TOMAS I. Good features to track[C]//Proceedings of 1994 IEEE Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 1994: 593-600. |
| [39] | BAKER S, MATTHEWS I. Lucas-kanade 20 years on: a unifying framework[J]. International Journal of Computer Vision, 2004, 56(3):221-255. |
| [40] | ZHANG Lilian, KOCH R. An efficient and robust line segment matching approach based on LBD descriptor and pairwise geometric consistency[J]. Journal of Visual Communication and Image Representation, 2013, 24(7):794-805. |
| [41] | ELFES A. Using occupancy grids for mobile robot perception and navigation[J]. Computer, 1989, 22(6):46-57. |
| [42] | ZHOU Boyu, ZHANG Yichen, CHEN Xinyi, et al. FUEL: fast UAV exploration using incremental frontier structure and hierarchical planning[J]. IEEE Robotics and Automation Letters, 2021, 6(2):779-786. |
| [43] | ZHOU Xin, WANG Zhepei, YE Hongkai, et al. EGO-planner: an ESDF-free gradient-based local planner for quadrotors[J]. IEEE Robotics and Automation Letters, 2021, 6(2):478-485. |
| [44] | WANG Zhepei, ZHOU Xin, XU Chao, et al. Geometrically constrained trajectory optimization for multicopters[J]. IEEE Transactions on Robotics, 2022, 38(5):3259-3278. |
| [45] | REN Yunfan, ZHU Fangcheng, LIU Wenyi, et al. Bubble planner: planning high-speed smooth quadrotor trajectories using receding corridors[C]//Proceedings of 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems. Kyoto: IEEE, 2022: 6332-6339. |
| [46] | ZHAO Yinghao, YAN Li, CHEN Yu, et al. Robust and efficient trajectory replanning based on guiding path for quadrotor fast autonomous flight[J]. Remote Sensing, 2021, 13(5):972. |
| [47] | ZHOU Boyu, GAO Fei, WANG Luqi, et al. Robust and efficient quadrotor trajectory generation for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2019, 4(4):3529-3536. |
| [48] | BURRI M, NIKOLIC J, GOHL P, et al. The EuRoC micro aerial vehicle datasets[J]. International Journal of Robotics Research, 2016, 35(10):1157-1163. |
| [49] | LEUTENEGGER S, FURGALE P, RABAUD V, et al. Key frame-based visual-inertial SLAM using nonlinear optimization[C]//Proceedings of 2013 Science and Systems IX. Robotics: Science and Systems Foundation, 2013. |
| [50] | HE Y, ZHAO J, GUO Y, et al. PL-VIO: tightly-coupled monocular visual-inertial odometry using point and line features[J]. Sensors (Basel), 2018, 18(4):E1159. |
| [51] | SCHÖNBERGER J L, ZHENG Enliang, FRAHM J M, et al. Pixelwise view selection for unstructured multi-view stereo[C]//Proceedings of 2016 Computer Vision. Cham: Springer, 2016: 501-518. |
| [1] | 邵克凡, 李增科, 孙猛, 刘振彬, 吴祺. 智能手机多源数据融合增强的地磁SLAM方法[J]. 测绘学报, 2025, 54(10): 1812-1825. |
| [2] | 吴唯同, 陈驰, 杨必胜, 何秀凤. 退化场景稳健的激光雷达、毫米波雷达与惯性融合里程计方法[J]. 测绘学报, 2025, 54(9): 1677-1686. |
| [3] | 刘佳音, 李佳田, 陈国坤, 阿晓荟, 韦晶晶, 胡浩. 一种利用目标变化估计相机姿态的马氏模型[J]. 测绘学报, 2025, 54(6): 1071-1081. |
| [4] | 贾鑫, 朱庆, 葛旭明, 马瑞峰, 胡翰. 车载LiDAR点云驱动的高速公路护栏参数化建模及变形段识别[J]. 测绘学报, 2025, 54(4): 688-701. |
| [5] | 赖路广, 赵冬青, 李林阳, 樊文哲, 李雄庆, 李鹏飞. 弱纹理黑暗场景下点线结合的红外惯性里程计[J]. 测绘学报, 2025, 54(3): 448-460. |
| [6] | 蔺小虎, 杨鑫, 姚顽强, 马宏伟, 马柏林, 马雄伟. 面向复杂地下空间的多源传感器数据动态加权融合SLAM方法[J]. 测绘学报, 2025, 54(3): 523-535. |
| [7] | 毛庆洲, 夏梦璇, 李清泉, 朱璟, 樊廷立. 多站点云光束法全局配准方法[J]. 测绘学报, 2024, 53(9): 1663-1670. |
| [8] | 张丹, 王伟峰, 黄桂平, 王新萍, 刘彦荣, 赵章红. 双相机工业摄影测量系统测量场误差分析与现场评定方法[J]. 测绘学报, 2024, 53(9): 1725-1736. |
| [9] | 康俊华. 基于全卷积神经网络的端到端立体密集匹配研究[J]. 测绘学报, 2022, 51(5): 785-785. |
| [10] | 李佳田, 王聪聪, 阿晓荟, 晏玲, 朱志浩, 高鹏. 多向前方交会与单隐层神经网络结合的近景前方交会法[J]. 测绘学报, 2020, 49(6): 736-745. |
| [11] | 闫利, 戴集成, 谭骏祥, 刘华, 陈长军. SLAM激光点云整体精配准位姿图技术[J]. 测绘学报, 2019, 48(3): 313-321. |
| [12] | 张春森, 张萌萌, 郭丙轩. 影像信息驱动的三角网格模型优化方法[J]. 测绘学报, 2018, 47(7): 959-967. |
| [13] | 闫利, 谭骏祥, 刘华, 陈长军. 融合遗传算法和ICP的地面与车载激光点云配准[J]. 测绘学报, 2018, 47(4): 528-536. |
| [14] | 张帆, 黄印, 黄先锋, 徐思奇. 非直视区域的普通平面镜辅助地面三维激光扫描方法[J]. 测绘学报, 2017, 46(12): 1950-1958. |
| [15] | 邓非, 吴幼丝, 胡玉雷, 崔红霞. 球形全景影像位姿估计的改进EPnP算法[J]. 测绘学报, 2016, 45(6): 677-684. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||