


测绘学报 ›› 2026, Vol. 55 ›› Issue (5): 787-797.doi: 10.11947/j.AGCS.2026.20250487
耿江辉1,2( ), 王锋1
), 王锋1
收稿日期:2025-11-18
修回日期:2026-05-16
出版日期:2026-06-23
发布日期:2026-06-23
作者简介:耿江辉(1982—),男,博士,教授,研究方向为GNSS精密数据处理和多源传感器融合。 E-mail:jgeng@whu.edu.cn
基金资助:
Jianghui GENG1,2(), Feng WANG1
Received:2025-11-18
Revised:2026-05-16
Online:2026-06-23
Published:2026-06-23
About author:GENG Jianghui (1982—), male, PhD, professor, majors in high-precision GNSS and multi-sensor fusion. E-mail: jgeng@whu.edu.cn
Supported by:摘要:
多源传感器融合是国家综合定位、导航与授时(PNT)体系下终端服务的核心技术。当前的多源融合框架普遍针对特定任务和场景进行预先配置和定制化设计,任务和场景的切换通常需要用户从头配置多源融合系统的软硬件结构,迟滞了跨场景多任务PNT应用中多源融合系统的快速高效重构。为此,本文提出了一种统一且通用的多源融合框架——组件化PNT。理论上,该框架支持任意类型与数量的传感器以“盲插即用”的方式灵活接入,解耦了多源传感器和融合处理平台之间的软硬件连接,通过组件化拼接从根本上提升了PNT系统面向不同任务和场景的即时适配性。具体来说,组件化PNT基于边缘计算模式,将传感器观测建模与多源传感器信息融合分别部署于传感器端和PNT平台端,设计了标准化的软硬件接口,实现了两端之间的统一信息交互,最终达到传感器在PNT平台上盲插即用的效果。依托自主研发的组件化PNT原型样机,本文在不同PNT场景的切换试验中实施了传感器的动态接入、移除与更换,验证了组件化PNT系统的盲插即用能力,以及在多域转换与传感器动态切换中的自主重构能力。试验结果表明,随着传感器数量和类型的逐步扩充,组件化系统的实时PNT性能能够即时改善,提升了PNT平台针对不同场景和任务时重构软硬件的效率。
中图分类号:
耿江辉, 王锋. 多源传感器“盲插即用”的组件化PNT融合框架、原理及试验验证[J]. 测绘学报, 2026, 55(5): 787-797.
Jianghui GENG, Feng WANG. Componentized PNT framework for blind-plug-and-play multi-sensor fusion and its principles and experimental verification[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 787-797.
表1
参数抽象化表达"
| 参数属性 | 描述 |
|---|---|
| 时间 | 用于将参数与相同时间的观测值相关联 |
| 维度 | 用于参数内存分配与估计器初始化 |
| 初值 | 参数估计线性化点,参数更新起点 |
| 时变特性 | 用于建立参数历元间约束伪观测方程 |
| 更新规则 | 用于校正参数初值,得到参数估计值 |
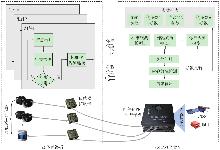
图1
组件化PNT系统架构"

图2
组件化PNT盲插即用验证试验环境"

表2
组件化PNT盲插即用验证试验传感器配置"
| 传感器 | 描述 |
|---|---|
| GNSS | 型号:U-blox ZED-F9P |
| 采样率:1 Hz | |
| 信号频率:GPS/QZSS L1/L2, | |
| GLONASS L1/L2, | |
| Galileo E1/E5b, | |
| BeiDou B1I/B2I | |
| IMU | 型号:ADIS16470 |
| 采样率:200 Hz | |
| 器件参数: | |
| 陀螺仪: | |
角度随机游走:0.34(°)/ | |
| 零偏稳定性:8(°)/h | |
| 加速度计: | |
速度随机游走:0.037 m/s/ | |
| 零偏稳定性:13μg | |
| Camera 1 | 型号:Realsense D435 |
| 采样率:30 Hz | |
| FOV:69°×42° | |
| 图像分辨率:1920×1080 | |
| Camera 2 | 型号:Realsense D455 |
| 采样率:30 Hz | |
| FOV:90°×65° | |
| 图像分辨率:1280×800 | |
| Camera 3 | 型号:Realsense D455 |
| 采样率:30 Hz | |
| FOV:90°×65° | |
| 图像分辨率:1280×800 | |
| LiDAR | 型号:Livox MID-360 |
| 采样率:10 Hz | |
| FOV:360°×59° | |
| 最大/最小探测距离:100 m/0.1 m |
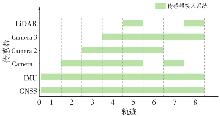
图3
组件化PNT盲插即用验证试验传感器接入情况"
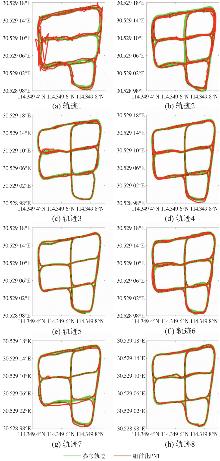
图4
组件化PNT盲插即用验证试验结果"
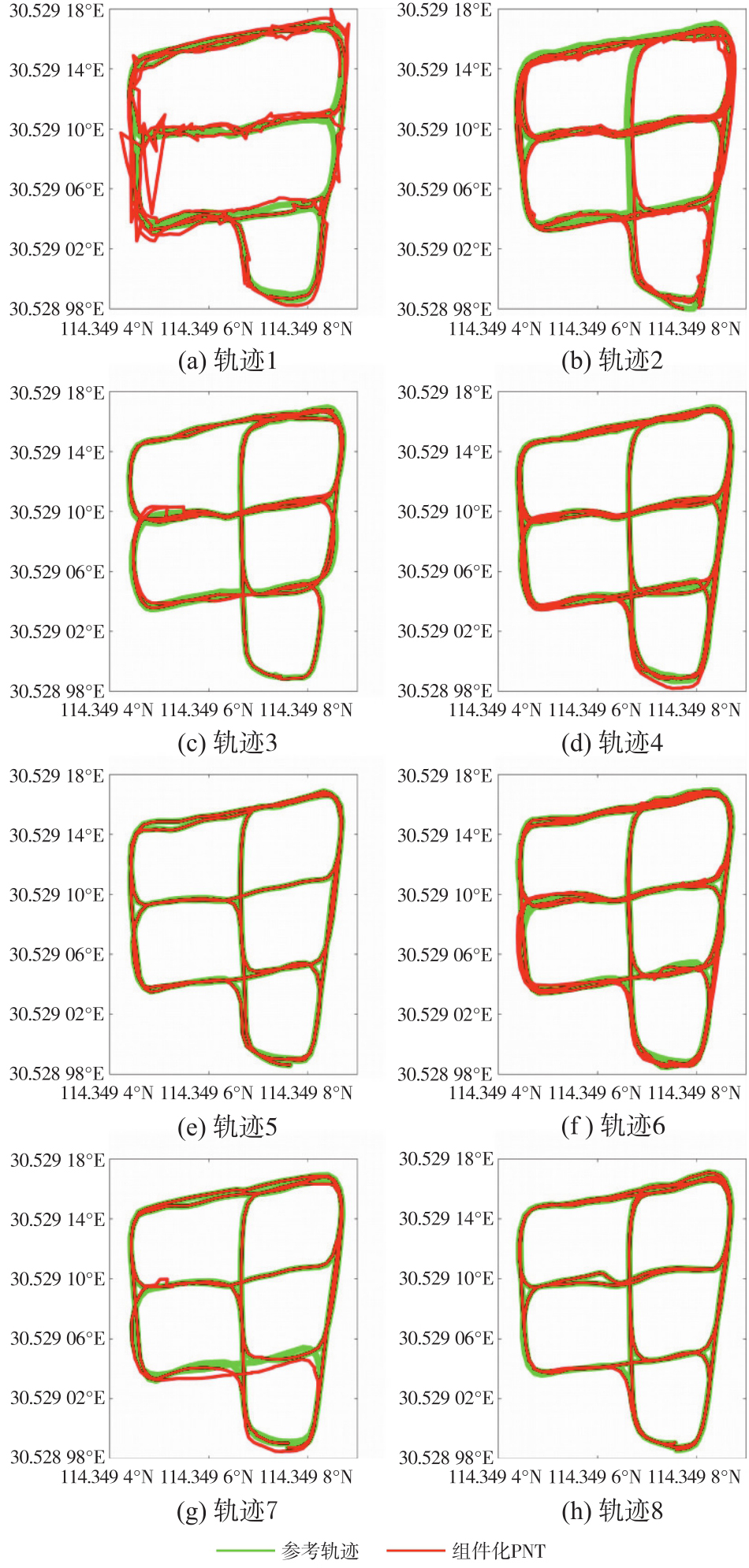
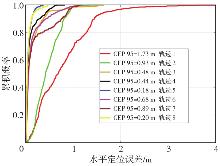
图5
组件化PNT盲插即用验证试验水平定位误差概率分布"
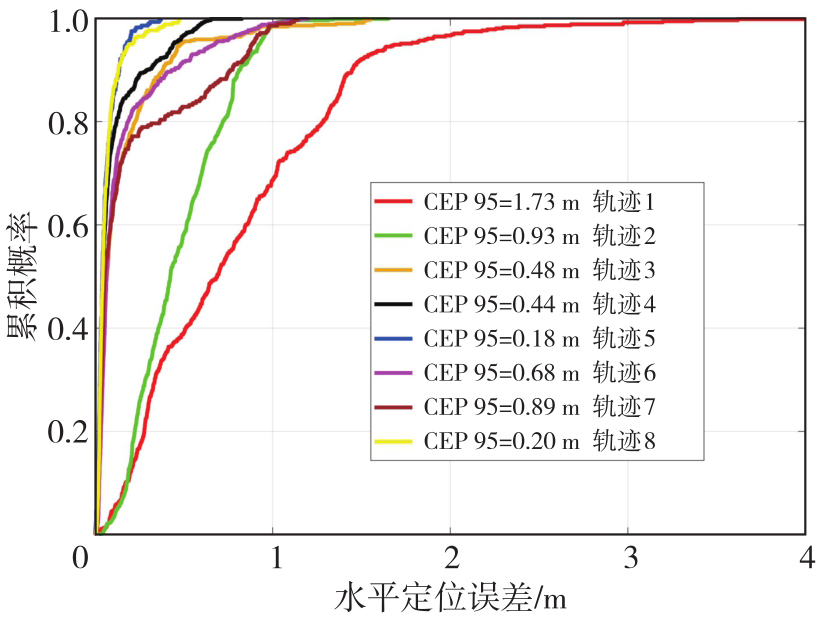
表3
组件化PNT盲插即用验证试验精度统计"
| 盲插即用传感器 | 轨迹 | 3D定位精度/m | 平均定位精度/m | 相较前一阶段提升/(%) | |
|---|---|---|---|---|---|
| 相机 | 雷达 | ||||
| 0 | 0/0 | 1 | 3.46 | 3.46 | — |
| 1 | 1/0 | 2 | 0.90 | 0.90 | 74 |
| 2/0 | 3 | 0.30 | |||
| 2 | 2/0 | 6 | 0.28 | 0.33 | 63 |
| 2/0 | 7 | 0.60 | |||
| 1/1 | 8 | 0.13 | |||
| 3 | 3/0 | 4 | 0.18 | 0.18 | 45 |
| 4 | 3/1 | 5 | 0.10 | 0.10 | 44 |
| [1] | 杨元喜, 任夏, 贾小林, 等. 以北斗系统为核心的国家安全PNT体系发展趋势[J]. 中国科学:地球科学, 2023, 53(5): 917-927. |
| YANG Yuanxi, REN Xia, JIA Xiaolin, et al. Development trends of the national secure PNT system based on BDS[J]. Science China Earth Sciences, 2023, 53(5): 917-927. | |
| [2] | 杨元喜, 姚铮, 毛悦, 等. 星基弹性PNT体系设计及其关键技术[J]. 中国科学:地球科学, 2025, 55(3): 686-698. |
| YANG Yuanxi, YAO Zheng, MAO Yue, et al. Resilient satellite-based PNT system design and key technologies[J]. Science China Earth Sciences, 2025, 55(3): 686-698. | |
| [3] | NEBYLOV A V, WATSON J. Aerospace navigation systems[M]. Chichester: John Wiley & Sons, 2016. |
| [4] | MINTSIS G, BASBAS S, PAPAIOANNOU P, et al. Applications of GPS technology in the land transportation system[J]. European Journal of Operational Research, 2004, 152(2): 399-409. |
| [5] | DU Y, WANG J, RIZOS C, et al. Vulnerabilities and integrity of precise point positioning for intelligent transport systems: overview and analysis[J]. Satellite Navigation, 2021, 2(1): 3. |
| [6] | JANSSEN T, KOPPERT A, BERKVENS R, et al. A survey on IoT positioning leveraging LPWAN, GNSS, and LEO-PNT[J]. IEEE Internet of Things Journal, 2023, 10(13): 11135-11159. |
| [7] |
党亚民, 蒋涛, 杨元喜, 等. 中国大地测量研究进展(2019—2023)[J]. 测绘学报, 2023, 52(9): 1419-1436. DOI: .
doi: 10.11947/j.AGCS.2023.20230343 |
|
DANG Yamin, JIANG Tao, YANG Yuanxi, et al. Research progress of geodesy in China (2019—2023)[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(9): 1419-1436. DOI: .
doi: 10.11947/j.AGCS.2023.20230343 |
|
| [8] | BOCK Y, MELGAR D. Physical applications of GPS geodesy: a review[J]. Reports on Progress in Physics, 2016, 79(10): 106801. |
| [9] |
杨元喜. 综合PNT体系及其关键技术[J]. 测绘学报, 2016, 45(5): 505-510. DOI: .
doi: 10.11947/j.AGCS.2016.20160127 |
|
YANG Yuanxi. Concepts of comprehensive PNT and related key technologies[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(5): 505-510. DOI: .
doi: 10.11947/j.AGCS.2016.20160127 |
|
| [10] | YANG Y X. Resilient PNT concept frame[J]. Journal of Geodesy and Geoinformation Science, 2019, 2(3): 1-7. |
| [11] | SHIN E. Estimation techniques for low-cost inertial navigation[R]. Calgary: Department of Geomatics Engineering, University of Calgary, 2005: 20219. |
| [12] | BONIN-FONT F, ORTIZ A, OLIVER G. Visual navigation for mobile robots: a survey[J]. Journal of Intelligent and Robotic Systems, 2008, 53: 263-296. |
| [13] | PARVIAINEN J, KANTOLA J, COLLIN J. Differential barometry in personal navigation[C]//Proceedings of 2008 IEEE/ION Position, Location and Navigation Symposium. Monterey: IEEE, 2008: 148-152. |
| [14] | CHRISTIAN J A, CRYAN S. A survey of LiDAR technology and its use in spacecraft relative navigation[C]//Proceedings of 2013 AIAA Guidance, Navigation, and Control Conference. Reston: American Institute of Aeronautics and Astronautics, 2013. |
| [15] | WAHDAN A, GEORGY J, ABDELFATAH W F, et al. Magnetometer calibration for portable navigation devices in vehicles using a fast and autonomous technique[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(5): 2347-2352. |
| [16] | El-SHEIMY N, YOUSSEF A. Inertial sensors technologies for navigation applications: state of the art and future trends[J]. Satellite Navigation, 2020, 1(1): 2. |
| [17] | El-SHEIMY N, LI Y. Indoor navigation: state of the art and future trends[J]. Satellite Navigation, 2021, 2(1): 7. |
| [18] | SOLOVIEV A, YANG C. Reconfigurable integration filter engine (RIFE) for plug-and-play navigation[C]//Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation. Nashville: ION, 2013: 2075-2083. |
| [19] | SOLOVIEV A, MILLER M M. Navigation in difficult environments: multi-sensor fusion techniques[M]//FOURATI H. Sensors: theory, algorithms, and applications. London: Springer, 2012: 199-229. |
| [20] | MENG Q, HSU L T. Resilient interactive sensor-independent-update fusion navigation method[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 16433-16447. |
| [21] | HENG L, CHOI B, CUI Z, et al. Project AutoVision: localization and 3D scene perception for an autonomous vehicle with a multi-camera system[C]//Proceedings of 2019 IEEE International Conference on Robotics and Automation. Montreal: IEEE, 2019: 4695-4702. |
| [22] | KOPARDEKAR P H. Unmanned aerial system (UAS) traffic management (UTM): enabling low-altitude airspace and UAS operations[R]. Washington, D C: National Aeronautics and Space Administration, 2014. |
| [23] | YANG C, SOLOVIEV A. Relative navigation with displacement measurements and its absolute correction[C]//Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation. Nashville: ION, 2013: 2084-2093. |
| [24] | ZHANG X, LI J, LI Z, et al. Multi-sensor fusion for autonomous driving[M]. Cham: Springer, 2023. |
| [25] | LYNEN S, ACHTELIK M W, WEISS S, et al. A robust and modular multi-sensor fusion approach applied to MAV navigation[C]//Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2013: 3923-3929. |
| [26] | BAI S Y, LAI J Z, LYU P, et al. A novel plug-and-play factor graph method for asynchronous absolute/relative measurements fusion in multisensor positioning[J]. IEEE Transactions on Industrial Electronics, 2022, 70(1): 940-950. |
| [27] | CHIU H P, ZHOU X S, CARLONE L, et al. Constrained optimal selection for multi-sensor robot navigation using plug-and-play factor graphs[C]//Proceedings of 2014 IEEE International Conference on Robotics and Automation. Hong Kong: IEEE, 2014: 663-670. |
| [28] | MENG Q, SU C, JIANG Y, et al. Multi-sensor plug-and-play navigation based on resilient information filter[J]. IEEE Sensors Journal, 2025, 25(7): 11563-11573. |
| [29] | JOHN B. DARPA positioning, navigation, and timing (PNT) technology and their impacts on GPS users[C]//Proceedings of the 23rd Meeting of Space-Based Positioning, Navigation and Timing. Long Beach: IEEE, 2019. |
| [30] | 王巍, 孟凡琛, 阚宝玺. 国家综合PNT体系下的多源自主导航系统技术[J]. 导航与控制, 2022, 21(3/4): 1-10. |
| WANG Wei, MENG Fanchen, KAN Baoxi. Multi-source autonomous navigation system technology under national comprehensive PNT system[J]. Navigation and Control, 2022, 21(3/4): 1-10. | |
| [31] | CHEN R, ZHAO L. Multi-level autonomous integrity monitoring method for multi-source PNT resilient fusion navigation[J]. Satellite Navigation, 2023, 4(1): 21. |
| [32] | 杨元喜. 自适应抗差最小二乘估计[J]. 测绘学报, 1996, 25(3): 206-211. |
| YANG Yuanxi. Adaptively robust least squares estimation[J]. Acta Geodaetica et Cartographica Sinica, 1996, 25(3): 206-211. |
| [1] | 施闯, 陈鑫鑫, 王家乐, 夏鸣. 多源GNSS数据与深度学习驱动的智能手机RTK定位误差预测[J]. 测绘学报, 2026, 55(5): 761-775. |
| [2] | 李博峰, 章浙涛. 非模型化误差实时处理:探测、补偿及控制[J]. 测绘学报, 2026, 55(5): 776-786. |
| [3] | 朱锋, 廖元木, 周瑞, 张小红. 多传感器融合导航中的连续时间状态估计方法[J]. 测绘学报, 2026, 55(5): 798-808. |
| [4] | 姚凌寒, 徐天河, 丛阳滋, 张震, 邢建平. 基于IESRKF的LiDAR/UWB/INS多源传感器紧耦合模型[J]. 测绘学报, 2026, 55(5): 809-825. |
| [5] | 冯腾飞. 华北水储量变化与非构造形变的GRACE多源数据处理及信号分析[J]. 测绘学报, 2026, 55(5): 943-943. |
| [6] | 李贤炮. 联合GNSS和GRACE/GFO数据反演陆地水储量变化方法及应用[J]. 测绘学报, 2026, 55(5): 944-944. |
| [7] | 洪菊. GNSS精密单点定位增强技术研究[J]. 测绘学报, 2026, 55(5): 945-945. |
| [8] | 周洁. 基于多源异构数据的城市新老城区地震应急避难场所空间适宜性比较研究[J]. 测绘学报, 2026, 55(5): 949-949. |
| [9] | 祝程程, 李真, 郭金运, 周茂盛, 李婉秋. 基于限定区域的纬度做差法解算宽刈幅测高数据交叉点位置[J]. 测绘学报, 2026, 55(4): 673-683. |
| [10] | 杨小磊, 肖云, 杨丽清, 洪晓东, 郭恩泽, 王翰. 时变重力场反演的改进基线法[J]. 测绘学报, 2026, 55(4): 708-720. |
| [11] | 李洋, 黄海军, 刘素兰, 吴晓辉, 刘琦, 庞琪沛, 吴云龙. 鄱阳湖流域未来百年陆地水储量异常预测及干旱风险评估:基于CMIP6驱动的Transformer-GRU模型[J]. 测绘学报, 2026, 55(4): 721-738. |
| [12] | 杨先圣. 高可用可见光智能定位技术研究[J]. 测绘学报, 2026, 55(4): 753-753. |
| [13] | 耿继军. 基于智能手机多传感器融合的行人室内外定位研究[J]. 测绘学报, 2026, 55(4): 754-754. |
| [14] | 马宏阳. 对流层模型增强的PPP-AR理论方法及在机载导航中的应用研究[J]. 测绘学报, 2026, 55(4): 756-756. |
| [15] | 刘航. 联合地基GNSS和星载GNSS-R的低纬电离层闪烁监测及预报方法研究[J]. 测绘学报, 2026, 55(4): 758-758. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||