


测绘学报 ›› 2025, Vol. 54 ›› Issue (6): 1071-1081.doi: 10.11947/j.AGCS.2025.20230077
刘佳音( ), 李佳田(), 陈国坤, 阿晓荟, 韦晶晶, 胡浩
), 李佳田(), 陈国坤, 阿晓荟, 韦晶晶, 胡浩
收稿日期:2023-12-19
修回日期:2025-02-24
出版日期:2025-07-14
发布日期:2025-07-14
通讯作者:
李佳田
E-mail:1039427697@qq.com;ljtwcx@163.com
作者简介:刘佳音(1997—),女,博士生,研究方向为摄影测量与遥感。E-mail:1039427697@qq.com
基金资助:
Jiayin LIU(), Jiatian LI(), Guokun CHEN, Xiaohui A, Jingjing WEI, Hao HU
Received:2023-12-19
Revised:2025-02-24
Online:2025-07-14
Published:2025-07-14
Contact:
Jiatian LI
E-mail:1039427697@qq.com;ljtwcx@163.com
About author:LIU Jiayin (1997—), female, PhD candidate, majors in photogrammetry and remote sensing. E-mail: 1039427697@qq.com
Supported by:摘要:
与相机姿态的物-像方特征点联合求解不同,本文提出一种利用目标变化估计相机姿态的马氏模型。该模型将姿态视为随物方观测目标变化的随机变量,描述并建立两者间的映射关系,具体内容为:①利用最小二乘法得到马氏回归模型,以求解状态转移矩阵;②依据初始相机位姿信息确定姿态转移矩阵,构建关于姿态参数的马氏关系式;③为克服单步偏差,嵌入多时序姿态转移矩阵调整模型结构,形成具备强稳健性的马氏姿态模型。试验结果表明:观测目标在平移、旋转及复合变化下,马氏模型均具有较好的表现,能够实现相机姿态的有效估计。
中图分类号:
刘佳音, 李佳田, 陈国坤, 阿晓荟, 韦晶晶, 胡浩. 一种利用目标变化估计相机姿态的马氏模型[J]. 测绘学报, 2025, 54(6): 1071-1081.
Jiayin LIU, Jiatian LI, Guokun CHEN, Xiaohui A, Jingjing WEI, Hao HU. A Markov model for estimating camera pose using target changes[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(6): 1071-1081.

图1
坐标转换"
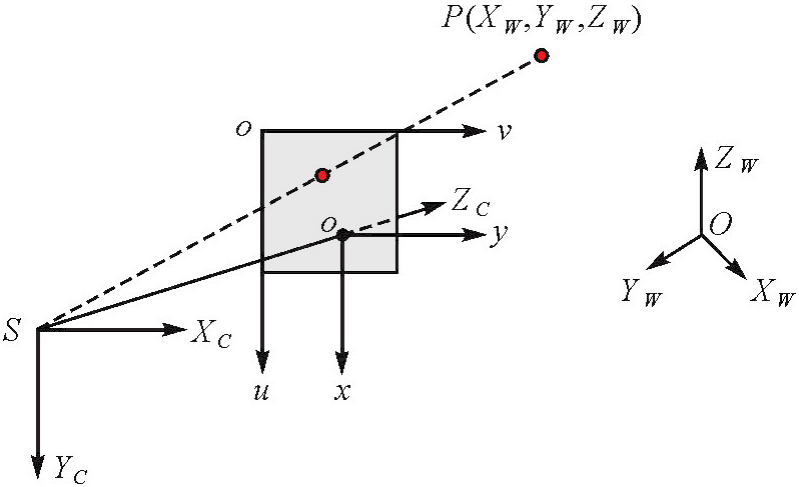

图2
算法流程"
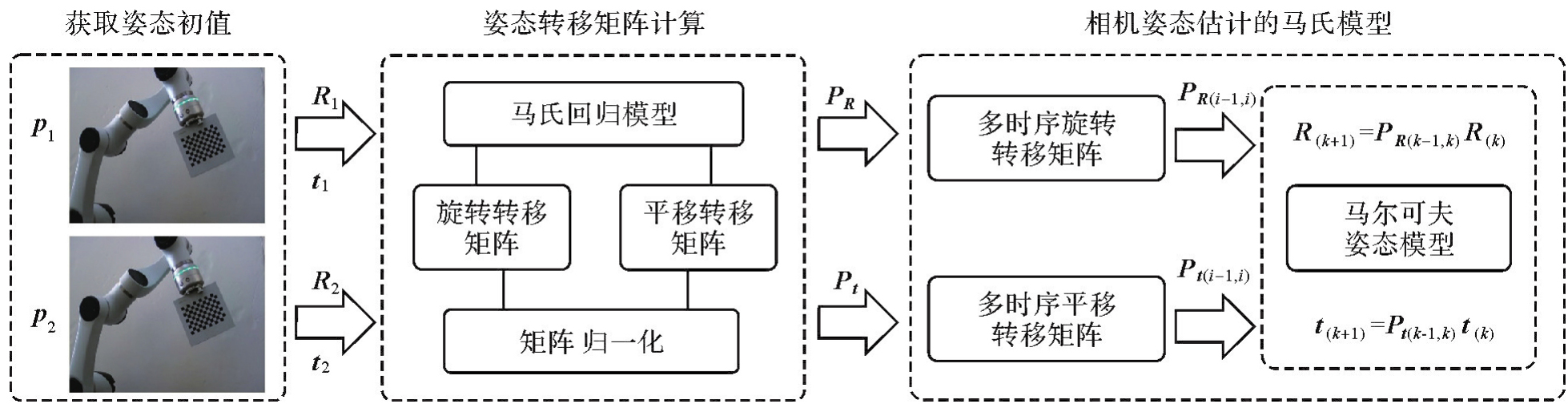

图3
试验装置"

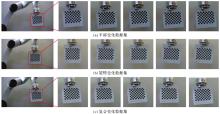
图4
部分变化图像"

表1
模型初始值"
| 变化方式 | 旋转向量 | 初始旋转向量 | 平移向量 | 初始平移向量 |
|---|---|---|---|---|
| 平移 | r1 | (-1.990 4,1.571 4,0.663 6) | t1 | (308.390 3,-70.652 2,5 876.476 1) |
| r2 | (-1.990 3,1.571 2,0.663 8) | t2 | (308.366 1,-70.645 4,5 876.003 5) | |
| 旋转 | r1 | (-2.127 1,1.640 1,0.561 6) | t1 | (322.115 6,-77.361 7,5 778.479 5) |
| r2 | (-2.126 8,1.639 6,0.561 6) | t2 | (322.073 9,-77.338 5,5 777.949 4) | |
| 复合 | r1 | (-2.019 6,1.612 8,0.667 7) | t1 | (295.585 2,-83.717 2,4 554.343 4) |
| r2 | (-2.019 7,1.612 7,0.667 5) | t2 | (295.583 4,-83.718 4,4 554.566 1) |
表2
量化分析"
| 变化方式 | 对比方法 | 重投影误差/像素 | |||||
|---|---|---|---|---|---|---|---|
| 最大值 | 最大值偏差 | 最小值 | 最小值偏差 | 平均值 | 平均值偏差 | ||
| 平移 | 张氏方法 | 0.012 97 | 0.000 31 | 0.011 94 | 0.000 18 | 0.012 51 | 0.000 27 |
| 本文方法 | 0.013 28 | — | 0.012 12 | — | 0.012 78 | — | |
| 旋转 | 张氏方法 | 0.018 64 | 0.000 87 | 0.012 21 | 0.000 18 | 0.015 53 | 0.000 38 |
| 本文方法 | 0.019 51 | — | 0.012 39 | — | 0.015 92 | — | |
| 复合 | 张氏方法 | 0.012 54 | 0.001 38 | 0.011 91 | 0.000 25 | 0.012 17 | 0.000 55 |
| 本文方法 | 0.013 92 | — | 0.012 16 | — | 0.012 72 | — | |
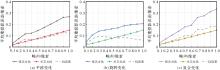
图5
稳定性对比结果"

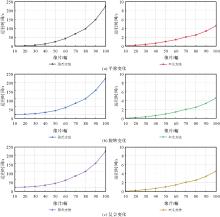
图6
时间效率评估结果"

表3
不同方法结果对比"
| 特征点数 | 估计方法 | 旋转向量 | 平移向量 | 重投影误差/像素 |
|---|---|---|---|---|
| NP=10 | 文献[ | (-2.083 0,-2.835 7,-0.286 7) | (-106.700 4,-57.805 7,5 280.475 8) | 1.171 |
| 文献[ | (-2.060 5,-2.749 3,-0.179 1) | (-106.947 0,-57.871 4,5 280.642 5) | 0.906 | |
| 文献[ | (-2.180 5,-2.075 6,-0.109 1) | (-106.583 7,-57.071 2,5 280.343 6) | 0.584 | |
| 本文方法 | (-2.212 2,-2.114 5,-0.109 5) | (-106.593 4,-57.031 9,5 280.377 8) | 0.232 | |
| NP=5 | 文献[ | (-2.482 8,-2.060 3,0.207 2) | (-90.305 6,-58.704 9,13 821.011 2) | 1.778 |
| 文献[ | (-2.387 0,-2.018 9,0.200 3) | (-90.899 9,-58.990 2,13 802.440 5) | 1.115 | |
| 文献[ | (-2.230 9,-2.201 6,0.123 4) | (-91.223 8,-58.172 3,13 556.375 8) | 0.554 | |
| 本文方法 | (-2.258 9,-2.263 1,0.199 6) | (-91.283 5,-58.156 6,13 586.842 2) | 0.219 | |
| NP=0 | 文献[ | — | — | — |
| 文献[ | — | — | — | |
| 文献[ | — | — | — | |
| 本文方法 | (-2.234 6,-2.105 2,0.183 1) | (-51.933 6,-57.716 9,1 350.579 4) | 0.253 |
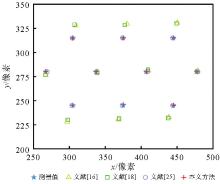
图7
像平面重投影"
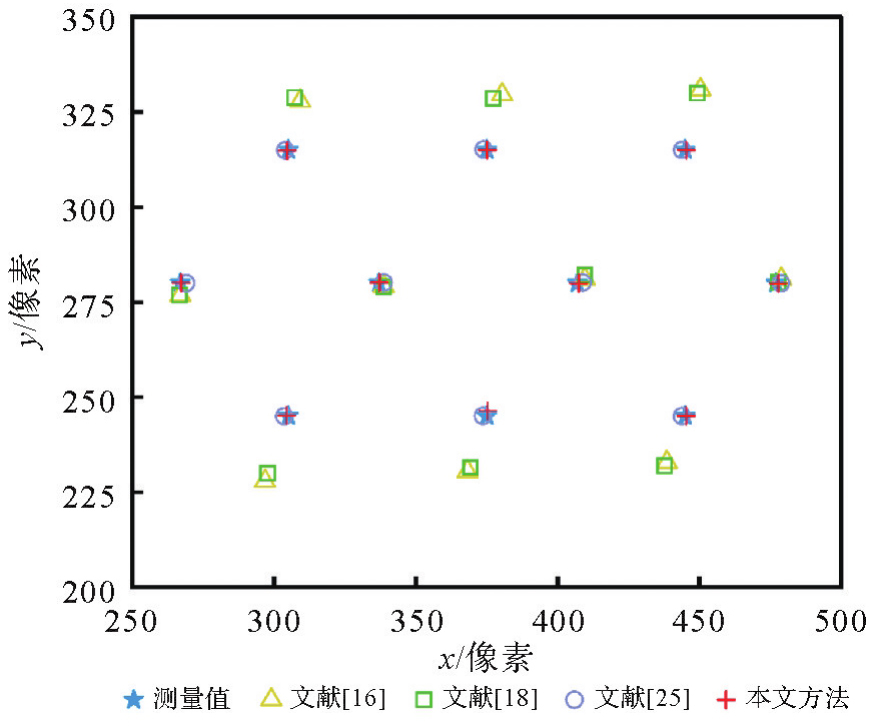
表4
特征点坐标"
| 特征点 | 像点坐标 | 世界坐标 | |||
|---|---|---|---|---|---|
| x/像素 | y/像素 | XW/mm | YW/mm | ZW/mm | |
| 1 | -84.14 | -68.99 | 36 589.41 | 25 273.32 | 2 195.17 |
| 1' | -84.13 | -68.98 | 36 589.40 | 25 273.31 | 2 195.16 |
| 2 | -53.40 | 82.61 | 37 631.08 | 31 324.51 | 728.69 |
| 2' | -53.39 | 82.60 | 37 631.07 | 31 324.50 | 728.68 |
| 3 | -14.78 | -76.63 | 39 100.97 | 24 934.98 | 2 386.50 |
| 3' | -14.77 | -76.62 | 39 100.96 | 24 934.97 | 2 386.49 |
| 4 | 10.46 | 64.63 | 40 426.54 | 30 319.81 | 757.31 |
| 4' | 10.45 | 64.62 | 40 426.53 | 30 319.80 | 757.30 |
表5
对比分析结果"
| 组别 | 方法 | XS | YS | ZS | φ | ω | κ | 单位权中误差 |
|---|---|---|---|---|---|---|---|---|
| 第1组 | 空间后方交会 | 39 785.57 | 27 496.44 | 7 570.18 | -0.002 593 | -0.001 165 | -0.066 702 | 0.000 106 |
| 马氏方法 | 39 786.67 | 27 497.14 | 7 570.29 | -0.002 757 | -0.001 383 | -0.066 654 | 0.000 103 | |
| 第2组 | 空间后方交会 | 39 784.78 | 27 494.62 | 7 651.00 | -0.002 480 | -0.001 054 | -0.066 725 | 0.000 111 |
| 马氏方法 | 39 785.88 | 27 496.44 | 7 651.97 | -0.002 600 | -0.001 286 | -0.066 650 | 0.000 103 | |
| 第3组 | 空间后方交会 | 39 783.99 | 27 493.80 | 7 571.83 | -0.002 367 | -0.000 944 | -0.066 747 | 0.000 117 |
| 马氏方法 | 39 786.20 | 27 497.32 | 7 571.91 | -0.002 711 | -0.001 393 | -0.066 623 | 0.000 105 |
表6
试验数据统计"
| 速度/(m/s) | 采集图幅 | 张氏方法 | |
|---|---|---|---|
| 有效图幅 | 轨迹观测 | ||
| 0.1 | 604 | 604 | √ |
| 1.0 | 144 | 117 | × |
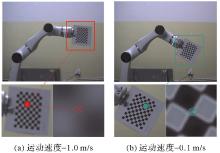
图8
不同速度采集图像对比"
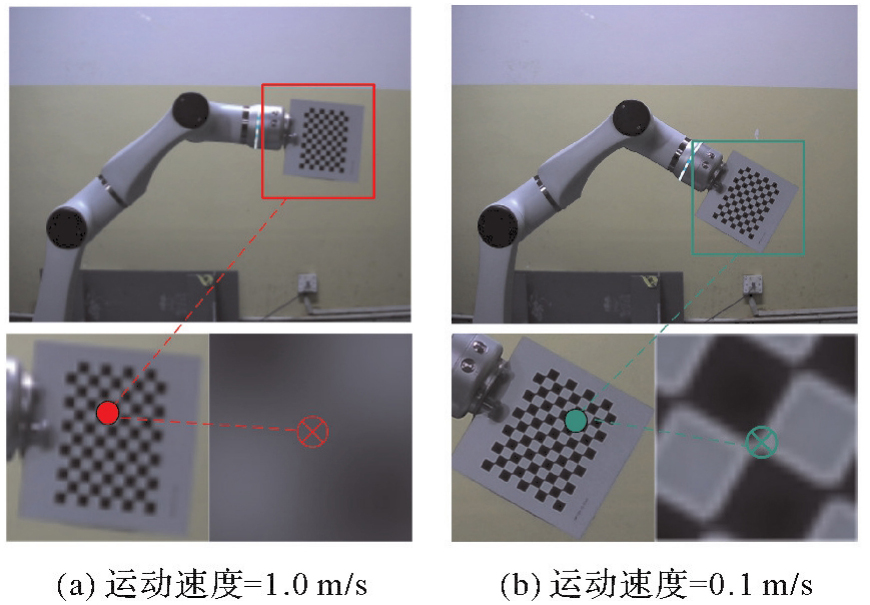
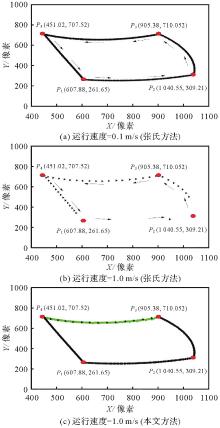
图9
目标轨迹"

| [1] | AZUMA R, BAILLOT Y, BEHRINGER R, et al. Recent advances in augmented reality[J]. IEEE Computer Graphics and Applications, 2001, 21(6): 34-47. |
| [2] | GONG Jianya, JI Shunping. Photogrammetry and deep learning[J]. Journal of Geodesy and Geoinformation Science, 2018, 1(1): 1-15. |
| [3] |
尚洋, 孙晓亮, 张跃强, 等. 三维目标位姿跟踪与模型修正[J]. 测绘学报, 2018, 47(6): 799-808. DOI: .
doi: 10.11947/j.AGCS.2018.20170626 |
|
SHANG Yang, SUN Xiaoliang, ZHANG Yueqiang, et al. Research on 3D target pose tracking and modeling[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(6): 799-808. DOI: .
doi: 10.11947/j.AGCS.2018.20170626 |
|
| [4] | DEMENTHON D, DAVIS L S. Exact and approximate solutions of the perspective-three-point problem[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14(11): 1100-1105. |
| [5] | KNEIP L, SCARAMUZZA D, SIEGWART R. A novel parametrization of the perspective-three-point problem for a direct computation of absolute camera position and orientation[C]//Proceedings of 2011 CVPR. Colorado Springs: IEEE, 2011: 2969-2976. |
| [6] | LI Shiqi, XU Chi. A stable direct solution of perspective-three-point problem[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2011, 25(5): 627-642. |
| [7] | BUJNAK M, KUKELOVA Z, PAJDLA T. A general solution to the P4P problem for camera with unknown focal length[C]//Proceedings of 2008 IEEE Conference on Computer Vision and Pattern Recognition. Anchorage: IEEE, 2008: 1-8. |
| [8] | TRIGGS B. Camera pose and calibration from 4 or 5 known 3D points[C]//Proceedings of the 7th IEEE International Conference on Computer Vision. Kerkyra: IEEE, 1999, 1: 278-284. |
| [9] | ABDEL-AZIZ Y I, KARARA H M, HAUCK M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry[J]. Photogrammetric Engineering & Remote Sensing, 2015, 81(2): 103-107. |
| [10] | QUAN Long, LAN Zhongdan. Linear N-point camera pose determination[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1999, 21(8): 774-780. |
| [11] | ANSAR A, DANIILIDIS K. Linear pose estimation from points or lines[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(5): 578-589. |
| [12] | LEPETIT V, MORENO-NOGUER F, FUA P. EPnP: an accurate O(n) solution to the PnP problem[J]. International Journal of Computer Vision, 2009, 81(2): 155-166. |
| [13] | LI S, XU C, XIE M. A robust O(n) solution to the perspective-n-point problem[J]. IEEE Trans Pattern Anal Mach Intell, 2012, 34(7): 1444-1450. |
| [14] | HESCH J A, ROUMELIOTIS S I. A direct least-squares (DLS) method for PnP[J]. Proceedings of the IEEE International Conference on Computer Vision, 2011: 383-390. |
| [15] | ZHENG Yinqiang, KUANG Yubin, SUGIMOTO S, et al. Revisiting the PnP problem: a fast, general and optimal solution[C]//Proceedings of 2013 IEEE International Conference on Computer Vision. Sydney: IEEE, 2013: 2344-2351. |
| [16] | WANG Ping, XU Guili, CHENG Yuehua, et al. A simple, robust and fast method for the perspective-n-point problem[J]. Pattern Recognition Letters, 2018, 108: 31-37. |
| [17] | ZHOU Lipu, KAESS M. An efficient and accurate algorithm for the perspecitve-n-point problem[C]//Proceedings of 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Macau: IEEE, 2019: 6245-6252. |
| [18] | LU C P, HAGER G D, MJOLSNESS E. Fast and globally convergent pose estimation from video images[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(6): 610-622. |
| [19] | DEMENTHON D F, DAVIS L S. Model-based object pose in 25 lines of code[J]. International Journal of Computer Vision, 1995, 15(1): 123-141. |
| [20] | ZHANG Xiaohu, WANG Kunpeng, ZHANG Zheng, et al. A new line-based orthogonal iteration pose estimation algorithm[C]//Proceedings of 2009 International Conference on Information Engineering and Computer Science. Wuhan: IEEE, 2009: 1-4. |
| [21] | DIDIER J Y, ABABSA F E, MALLEM M. Hybrid camera pose estimation combining square fiducials localization technique and orthogonal iteration algorithm[J]. International Journal of Image and Graphics, 2008, 8(1): 169-188. |
| [22] | HUO Ju, ZHANG Guiyang, CUI Jiashan, et al. A novel algorithm for pose estimation based on generalized orthogonal iteration with uncertainty-weighted measuring error of feature points[J]. Journal of Modern Optics, 2018, 65(3): 331-341. |
| [23] | SUN Changku, DONG Hang, ZHANG Baoshang, et al. An orthogonal iteration pose estimation algorithm based on an incident ray tracking model[J]. Measurement Science and Technology, 2018, 29(9): 095402. |
| [24] | DONG Hang, SUN Changku, ZHANG Baoshang, et al. Simultaneous pose and correspondence determination combining soft assign and orthogonal iteration[J]. IEEE Access, 2019, 7: 137720-137730. |
| [25] | 熊芝, 许航, 张刘港, 等. 基于加权加速正交迭代算法的相机位姿估计[J]. 红外与激光工程, 2022, 51(10): 183-191. |
| XIONG Zhi, XU Hang, ZHANG Liugang, et al. Pose estimation of camera based on weighted accelerated orthogonal iterative algorithm[J]. Infrared and Laser Engineering, 2022, 51(10): 183-191. | |
| [26] | 施仁杰. 马尔科夫链基础及其应用[M]. 西安: 西安电子科技大学出版社, 1992. |
| SHI Renjie. Markov chain foundation and its application[M]. Xi'an: Xidian University Press, 1992. | |
| [27] |
尹章才, 孙华涛, 陈雪菲, 等. 定向移动基于马尔科夫链的时空不确定性[J]. 测绘学报, 2015, 44(10): 1160-1166, 1176. DOI: .
doi: 10.11947/j.AGCS.2015.20140357 |
|
YIN Zhangcai, SUN Huatao, CHEN Xuefei, et al. Modeling uncertainty of directed movement via Markov chains[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(10): 1160-1166, 1176. DOI: .
doi: 10.11947/j.AGCS.2015.20140357 |
|
| [28] | ZHANG Zhengyou. Flexible camera calibration by viewing a plane from unknown orientations[C]//Proceedings of the 7th IEEE International Conference on Computer Vision. Kerkyra: IEEE, 1999: 666-673. |
| [29] | 李佳田, 贾成林, 牛一如, 等. 一种求解单像空间后方交会的监督学习方法[J]. 武汉大学学报(信息科学版), 2019, 44(8): 1144-1152. |
| LI Jiatian, JIA Chenglin, NIU Yiru, et al. A supervised learning method for solving space resection of single image[J]. Geomatics and Information Science of Wuhan University, 2019, 44(8): 1144-1152. |
| [1] | 刘婧璇, 刘学习, 张克非, 杨超, 吴素芹, 朱守庆, 郭福东. 基于LSTM模型与加权最小二乘组合的日长变化预测方法[J]. 测绘学报, 2026, 55(3): 477-489. |
| [2] | 邢志斌, 李姗姗, 田苗, 孟瑶, 杨娜, 李倩, 常品要. 10 800阶地形球谐系数模型构建的FFT块对角最小二乘法[J]. 测绘学报, 2026, 55(1): 36-45. |
| [3] | 赵一杰, 王君婷, 徐天河, 舒建旭, 刘杨范. 水下基准定位时变声速误差修正方法[J]. 测绘学报, 2025, 54(8): 1452-1463. |
| [4] | 陈海禄, 沈云中. GNSS辅助下的InSAR对流层延迟垂直分层与湍流分量联合改正模型[J]. 测绘学报, 2025, 54(10): 1786-1797. |
| [5] | 张展鹏, 李新星, 刘长建, 范昊鹏, 裴宪勇. 基于ico_HEALPix网格的超高阶地球重力场建模方法[J]. 测绘学报, 2024, 53(8): 1531-1539. |
| [6] | 阿晓荟, 李佳田, 刘佳音, 胡浩, 贺日兴, 陆美, 段烨. 相机位姿求解的复用镜像约束法[J]. 测绘学报, 2024, 53(3): 548-557. |
| [7] | 杨玲, 朱金成, 孙楠, 喻杨康, 沈云中, 李博峰. GNSS高级接收机自主完好性监测随机模型精化[J]. 测绘学报, 2024, 53(2): 286-295. |
| [8] | 刘昌振, 马威, 马红, 魏世轩. 建筑物轮廓方向计算和规则化的向量重组算法[J]. 测绘学报, 2023, 52(9): 1584-1594. |
| [9] | 朱锋, 罗科干, 陈惟杰, 刘万科, 张小红. 联合SVM和HMM的水上/水下导航场景感知模型构建[J]. 测绘学报, 2023, 52(5): 738-747. |
| [10] | 赵闯, 金涛勇, 秦朋波, 杨连俊. 顾及残差约束的多面函数法融合卫星测高和船载重力[J]. 测绘学报, 2023, 52(4): 605-613. |
| [11] | 王丽英, 吴际, 有泽, 李玉, CAMARA Mahamadou. 多维GMM与邻域约束的多光谱机载LiDAR数据城市地物分类[J]. 测绘学报, 2023, 52(3): 419-431. |
| [12] | 范雕, 李姗姗, 冯进凯, 黄炎, 范昊鹏, 张金辉, 李新星. 基于最小二乘配置的陌生海域海底地形反演方法[J]. 测绘学报, 2023, 52(12): 2039-2053. |
| [13] | 唐晓芳, 詹总谦, 丁久婕, 刘佳辉, 熊子柔. 顾及超像素光谱特征的无人机影像自动模糊聚类分割法[J]. 测绘学报, 2022, 51(5): 677-690. |
| [14] | 王珂, 刘国林, 付政庆, 王路遥. 基于Moore-Penrose广义逆及立体矩阵的可分离非线性最小二乘解算方法[J]. 测绘学报, 2022, 51(3): 340-350. |
| [15] | 鄢咏折, 彭松, 马友青, 张烁, 亓晨, 温博, 李昊, 贾阳, 刘少创. 行星探测器导航相机着陆后参数标定方法[J]. 测绘学报, 2022, 51(3): 437-445. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||