| [1] |
郭娇娇, 陈传法, 姚喜, 等. 基于多特征聚类的复杂环境机载点云层次滤波方法[J]. 测绘学报, 2023, 52(10): 1724-1737. DOI: .
doi: 10.11947/j.AGCS.2023.20220371
|
|
GUO Jiaojiao, CHEN Chuanfa, YAO Xi, et al. A multi-feature clustering-based hierarchical filtering method for airborne LiDAR point clouds in complex landscapes[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(10): 1724-1737. DOI: .
doi: 10.11947/j.AGCS.2023.20220371
|
| [2] |
杨宇妍, 臧玉府, 肖雄武, 等. 基于地形断裂线约束的机载激光点云高精度滤波方法[J]. 测绘学报, 2023, 52(12): 2164-2177. DOI: .
doi: 10.11947/j.AGCS.2023.20220616
|
|
YANG Yuyan, ZANG Yufu, XIAO Xiongwu, et al. An accurate breakline-aware filtering method for airborne laser scanning point clouds[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(12): 2164-2177. DOI: .
doi: 10.11947/j.AGCS.2023.20220616
|
| [3] |
HUI Zhenyang, HU Youjian, YEVENYO Y, et al. An improved morphological algorithm for filtering airborne LiDAR point cloud based on multi-level Kriging interpolation[J]. Remote Sensing, 2016, 8(1): 35.
|
| [4] |
HU Han, DING Yulin, ZHU Qing, et al. An adaptive surface filter for airborne laser scanning point clouds by means of regularization and bending energy[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 92: 98-111.
|
| [5] |
汪文琪, 李宗春, 付永健, 等. 一种多尺度自适应点云坡度滤波算法[J]. 武汉大学学报(信息科学版), 2022, 47(3): 438-446.
|
|
WANG Wenqi, LI Zongchun, FU Yongjian, et al. A multi-scale adaptive slope filtering algorithm for point cloud[J]. Geomatics and Information Science of Wuhan University, 2022, 47(3): 438-446.
|
| [6] |
ZHANG Jixian, LIN Xiangguo. Filtering airborne LiDAR data by embedding smoothness-constrained segmentation in progressive TIN densification[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 81: 44-59.
|
| [7] |
DAI Hengming, HU Xiangyun, SHU Zhen, et al. Deep ground filtering of large-scale ALS point clouds via iterative sequential ground prediction[J]. Remote Sensing, 2023, 15(4): 961.
|
| [8] |
HUI Zhenyang, WU Beiping, HU Youjian, et al. Improved progressive morphological filter for digital terrain model generation from airborne LiDAR data[J]. Applied Optics, 2017, 56(34): 9359-9367.
|
| [9] |
NIE Sheng, WANG Cheng, DONG Pinliang, et al. A revised progressive TIN densification for filtering airborne LiDAR data[J]. Measurement, 2017, 104: 70-77.
|
| [10] |
VOSSELMAN G. Slope based filtering of laser altimetry data[J]. International Archives of Photogrammetry and Remote Sensing, 2000, 33: 935-942.
|
| [11] |
CHEN Chuanfa, GUO Jiaojiao, LI Yanyan, et al. Segmentation-based hierarchical interpolation filter using both geometric and radiometric features for LiDAR point clouds over complex scenarios[J]. Measurement, 2023, 211: 112668.
|
| [12] |
QIN Nannan, TAN Weikai, GUAN Haiyan, et al. Towards intelligent ground filtering of large-scale topographic point clouds: a comprehensive survey[J]. International Journal of Applied Earth Observation and Geoinformation, 2023, 125: 103566.
|
| [13] |
CHEN Chuanfa, LI Yanyan, LI Wei, et al. A multiresolution hierarchical classification algorithm for filtering airborne LiDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 82: 1-9.
|
| [14] |
PLEANSAMAI K. M-estimator sample consensus planar extraction from image-based 3D point cloud for building information modelling[J]. International Journal of GEOMATE, 2019, 17(63): 69-76.
|
| [15] |
CHEN Chuanfa, CHANG Bingtao, LI Yanyan, et al. Filtering airborne LiDAR point clouds based on a scale-irrelevant and terrain-adaptive approach[J]. Measurement, 2021, 171: 108756.
|
| [16] |
GARCIA D. Robust smoothing of gridded data in one and higher dimensions with missing values[J]. Computational Statistics & Data Analysis, 2010, 54(4): 1167-1178.
|
| [17] |
CHEN Chuanfa, LI Yanyan, ZHAO Na, et al. A fast and robust interpolation filter for airborne lidar point clouds[J]. PLoS One, 2017, 12(5): e0176954.
|
| [18] |
PINGEL T J, CLARKE K C, MCBRIDE W A. An improved simple morphological filter for the terrain classification of airborne LiDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 77: 21-30.
|
| [19] |
QIN Nannan, TAN Weikai, MA Lingfei, et al. Deep learning for filtering the ground from ALS point clouds: a dataset, evaluations and issues[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2023, 202: 246-261.
|
| [20] |
ZHANG Keqi, CHEN S C, WHITMAN D, et al. A progressive morphological filter for removing nonground measurements from airborne LIDAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(4): 872-882.
|
| [21] |
AXELSSON P. DEM generation from laser scanner data using adaptive TIN models[J]. International Archives of Photogrammetry and Remote Sensing, 2000, 33(4): 110-117.
|
| [22] |
EVANS J S, HUDAK A T. A multiscale curvature algorithm for classifying discrete return LiDAR in forested environments[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007, 45(4): 1029-1038.
|
| [23] |
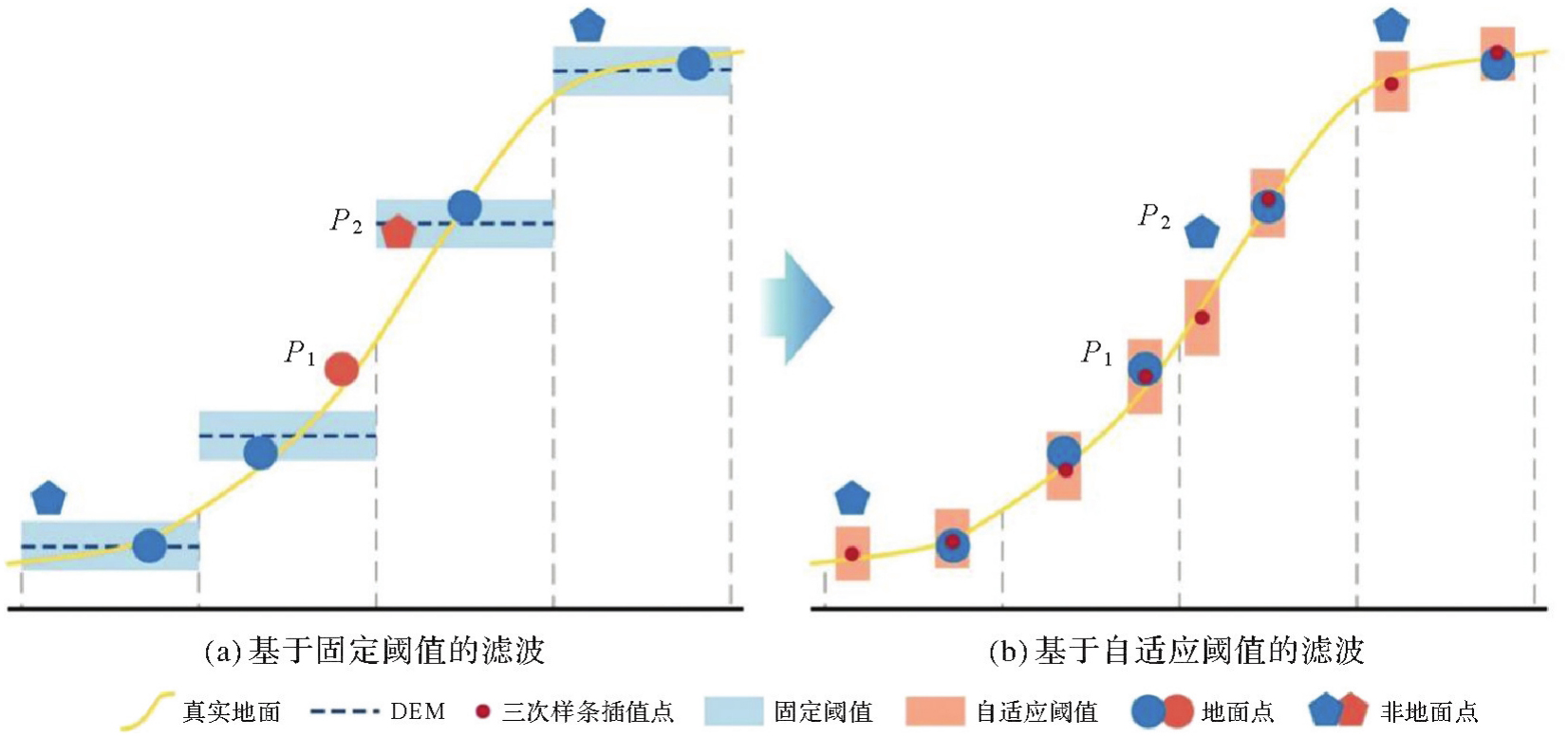
朱笑笑, 王成, 习晓环, 等. 多级移动曲面拟合的自适应阈值点云滤波方法[J]. 测绘学报, 2018, 47(2): 153-160. DOI: .
doi: 10.11947/j.AGCS.2018.20170491
|
|
ZHU Xiaoxiao, WANG Cheng, XI Xiaohuan, et al. Hierarchical threshold adaptive for point cloud filter algorithm of moving surface fitting[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(2): 153-160. DOI: .
doi: 10.11947/j.AGCS.2018.20170491
|
| [24] |
ZHANG Wuming, QI Jianbo, WAN Peng, et al. An easy-to-use airborne LiDAR data filtering method based on cloth simulation[J]. Remote Sensing, 2016, 8(6): 501.
|
| [25] |
CAO Di, WANG Cheng, DU Meng, et al. A multiscale filtering method for airborne LiDAR data using modified 3D alpha shape[J]. Remote Sensing, 2024, 16(8): 1443.
|
| [26] |
詹总谦, 胡孟琦, 满益云. 多尺度区域生长点云滤波地表拟合法[J]. 测绘学报, 2020, 49(6): 757-766. DOI: .
doi: 10.11947/j.AGCS.2020.20190142
|
|
ZHAN Zongqian, HU Mengqi, MAN Yiyun. Multi-scale region growing point cloud filtering method based on surface fitting[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(6): 757-766. DOI: .
doi: 10.11947/j.AGCS.2020.20190142
|



 ), 陈传法1(
), 陈传法1(