


测绘学报 ›› 2025, Vol. 54 ›› Issue (7): 1280-1293.doi: 10.11947/j.AGCS.2025.20230481
万杰1( ), 谢忠2,3(), 徐永洋2, 陶留锋2,3
), 谢忠2,3(), 徐永洋2, 陶留锋2,3
收稿日期:2023-10-17
修回日期:2025-04-17
出版日期:2025-08-18
发布日期:2025-08-18
通讯作者:
谢忠
E-mail:wanjie@cug.edu.cn;xiezhong@cug.edu.cn
作者简介:万杰(1993—),男,博士生,主要研究方向为三维点云智能分析处理。E-mail:wanjie@cug.edu.cn
基金资助:
Jie WAN1(), Zhong XIE2,3(), Yongyang XU2, Liufeng TAO2,3
Received:2023-10-17
Revised:2025-04-17
Online:2025-08-18
Published:2025-08-18
Contact:
Zhong XIE
E-mail:wanjie@cug.edu.cn;xiezhong@cug.edu.cn
About author:WAN Jie (1993—), male, PhD candidate, majors in intelligent analysis and processing of 3D point clouds. E-mail: wanjie@cug.edu.cn
Supported by:摘要:
车载LiDAR点云语义分割旨在提取道路及其路侧多类地物目标的三维信息,对城市道路场景的目标对象化与三维建模至关重要。针对当前深度学习网络在处理车载LiDAR点云时,由于架构限制以及难以有效提取和利用多尺度信息而导致小尺寸目标、数据缺失和被遮挡目标分割不准确等问题,本文提出了一种基于U形图卷积网络(U-GCN)的点云语义分割方法。首先,设计了一个动态图卷积算子,利用可学习的点核自适应地提取点云局部几何特征,并通过级联的动态图卷积算子来构建局部特征聚合模块和扩大感受野,以捕获目标结构和上下文信息。然后,结合U形编码器-解码器网络架构,通过跳跃连接的方式融合深层和浅层点特征来获取多尺度细节信息,以增强目标特征表达。最后,引入深度监督损失函数,引导网络利用各层输出的预测信息进行多尺度的监督训练,进一步提升网络的稳健性和整体性能。在Toronto-3D和WHU-MLS数据集上试验表明,本文方法在可视化分析和定量评价方面均优于当前主流网络,能够有效改善因目标尺度变化、遮挡、数据缺失造成的分割精度低的问题。
中图分类号:
万杰, 谢忠, 徐永洋, 陶留锋. 面向城市道路场景的车载LiDAR点云语义分割U形图卷积网络方法[J]. 测绘学报, 2025, 54(7): 1280-1293.
Jie WAN, Zhong XIE, Yongyang XU, Liufeng TAO. A U-shaped graph convolution network method for semantic segmentation of vehicle LiDAR point clouds towards urban road scenes[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1280-1293.

图1
本文方法的总体技术流程"

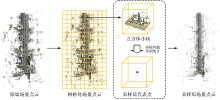
图2
场景点云网格采样"


图3
U-GCN整体网络结构"


图4
局部特征聚合模块"


图5
动态图卷积算子"


图6
基于U形架构的多尺度特征提取"

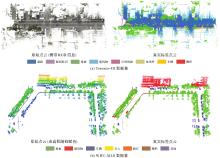
图7
试验数据样例"
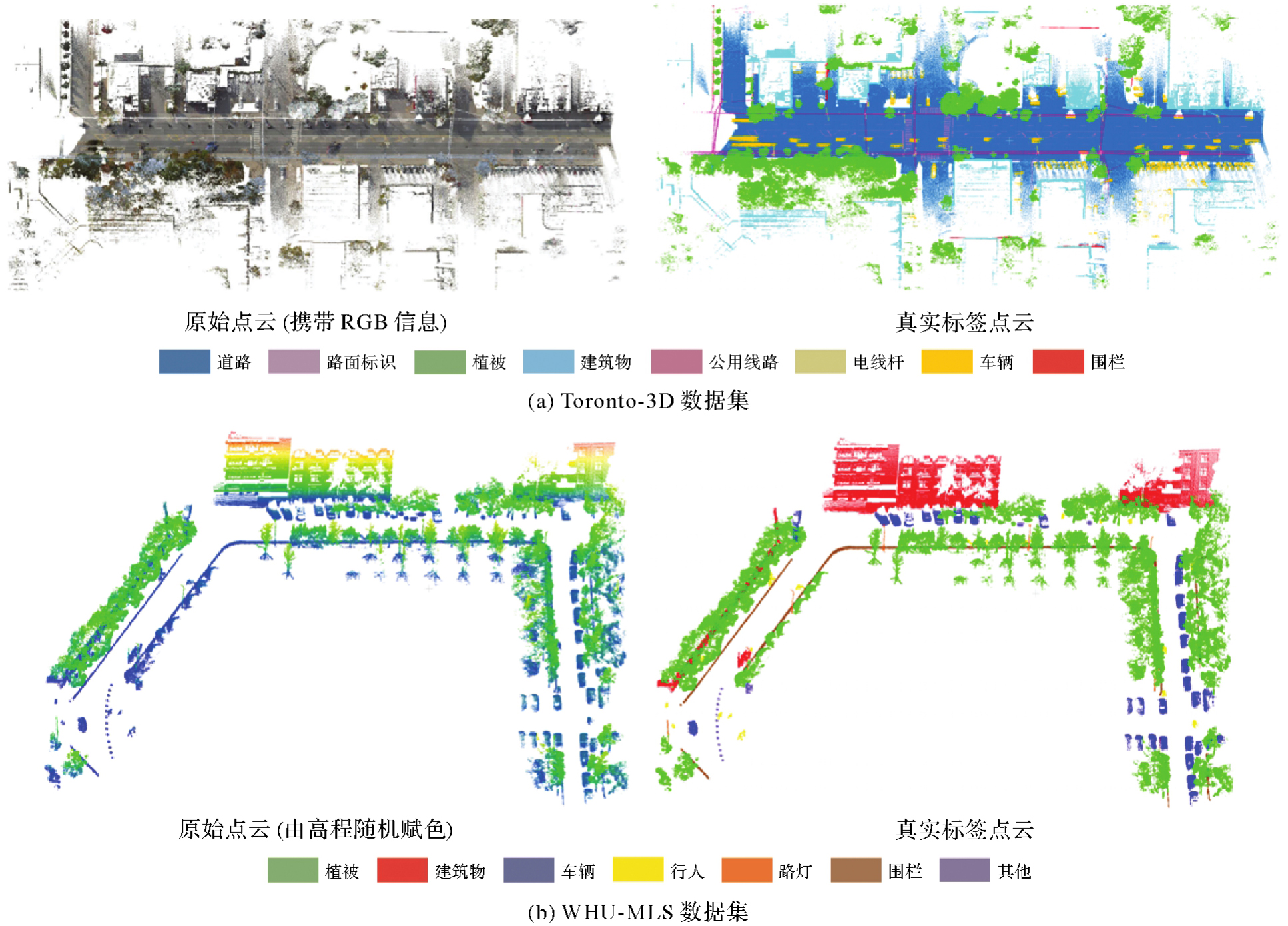

图8
不同网络在Toronto-3D数据集测试场景上的整体可视化结果比较"

图9
不同网络在Toronto-3D数据集测试场景上局部区域的可视化结果比较"

表1
Toronto-3D数据集定量评价结果比较"
| 方法 | OA | mAcc | mIoU | 单个类别IoU | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 道路 | 路面标识 | 植被 | 建筑物 | 公用线路 | 电线杆 | 汽车 | 围栏 | ||||
| PointNet++(MSG) | 93.3 | 74.3 | 61.6 | 93.5 | 37.3 | 89.6 | 82.4 | 45.1 | 61.1 | 73.1 | 10.3 |
| DGCNN | 95.3 | 78.2 | 69.3 | 95.2 | 33.5 | 95.2 | 91.8 | 78.9 | 72.0 | 72.0 | 16.5 |
| RandLA-Net | 95.4 | 76.3 | 71.4 | 94.8 | 0.0 | 95.3 | 92.6 | 86.4 | 71.4 | 90.7 | 40.3 |
| BAF-LAC | 95.4 | — | 70.2 | 94.8 | 0.0 | 95.8 | 92.3 | 80.2 | 73.8 | 90.5 | 33.8 |
| NeiEA-Net | 95.3 | — | 68.5 | 94.7 | 0.0 | 95.2 | 89.1 | 79.6 | 76.5 | 93.3 | 19.6 |
| 本文方法 | 96.4 | 82.9 | 79.0 | 95.6 | 33.8 | 97.2 | 93.0 | 86.7 | 81.0 | 93.4 | 51.5 |

图10
不同网络在WHU-MLS数据集上的可视化结果比较"

表2
WHU-MLS数据集定量评价结果比较"
| 方法 | OA | mAcc | mIoU | 单个类别IoU | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 植被 | 建筑物 | 车辆 | 行人 | 路灯 | 围栏 | 其他 | ||||
| PointNet++(MSG) | 85.9 | 57.9 | 44.7 | 80.8 | 73.6 | 82.2 | 30.4 | 0.0 | 45.5 | 0.0 |
| DGCNN | 80.6 | 62.5 | 39.9 | 85.8 | 67.8 | 68.5 | 31.0 | 0.1 | 18.8 | 0.0 |
| RandLA-Net | 83.7 | 57.9 | 51.7 | 71.0 | 68.8 | 90.1 | 7.4 | 50.8 | 74.0 | 0.0 |
| BAF-LAC | 90.7 | — | 56.5 | 85.3 | 88.7 | 69.9 | 15.6 | 47.0 | 67.0 | 0.2 |
| NeiEA-Net | 88.8 | — | 54.8 | 80.3 | 85.1 | 88.7 | 22.4 | 36.7 | 70.5 | 0.0 |
| 本文方法 | 91.3 | 67.8 | 61.2 | 84.4 | 85.0 | 88.4 | 56.4 | 37.9 | 76.3 | 0.0 |
表3
不同网络模块和结构设计对语义分割性能的影响"
| 消融网络 | 动态图卷积算子 | 局部特征聚合模块 | 跳跃连接 | 深度监督损失 | mIoU/(%) |
|---|---|---|---|---|---|
| A1 | 36.9 | ||||
| A2 | √ | 48.7 | |||
| A3 | √ | √ | 52.4 | ||
| A4 | √ | √ | √ | 58.0 | |
| A5 | √ | √ | √ | √ | 61.2 |

图11
不同消融网络的特征可视化结果比较"


图12
动态图卷积算子中不同K值的定量比较"

表4
U-GCN网络模型复杂度和性能分析"
| 方法 | FLOPs/GB | 参数/MB | 推理时间/s | mIoU/(%) |
|---|---|---|---|---|
| PointNet++(MSG) | 8 678.88 | 1.16 | 296.8 | 61.6 |
| DGCNN | 666.7 | 1.84 | 288.5 | 69.3 |
| RandLA-Net | 26.4 | 4.99 | 216.8 | 71.4 |
| BAF-LAC | 66.2 | 11.64 | 366.9 | 70.2 |
| NeiEA-Net | 34.0 | 4.87 | 247.7 | 68.5 |
| 本文方法 | 47.6 | 6.83 | 273.1 | 79.0 |
| [1] |
刘华. 车载激光点云地物提取与分类研究[J]. 测绘学报, 2020, 49(11): 1506. DOI: .
doi: 10.11947/j.AGCS.2020.20190434 |
|
LIU Hua. Object points extraction and classification of mobile LiDAR point clouds[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(11): 1506. DOI: .
doi: 10.11947/j.AGCS.2020.20190434 |
|
| [2] |
杨必胜, 韩旭, 董震. 适用于城市场景大规模点云语义标识的深度学习网络[J]. 测绘学报, 2021, 50(8): 1059-1067. DOI: .
doi: 10.11947/j.AGCS.2021.20210093 |
|
YANG Bisheng, HAN Xu, DONG Zhen. A deep learning network for semantic labeling of large-scale urban point clouds[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(8): 1059-1067. DOI: .
doi: 10.11947/j.AGCS.2021.20210093 |
|
| [3] |
杨必胜, 董震. 点云智能研究进展与趋势[J]. 测绘学报, 2019, 48(12): 1575-1585. DOI: .
doi: 10.11947/j.AGCS.2019.20190465 |
|
YANG Bisheng, DONG Zhen. Progress and perspective of point cloud intelligence[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(12): 1575-1585. DOI: .
doi: 10.11947/j.AGCS.2019.20190465 |
|
| [4] | YANG Bisheng, DONG Zhen, LIU Yuan, et al. Computing multiple aggregation levels and contextual features for road facilities recognition using mobile laser scanning data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 126: 180-194. |
| [5] | WEINMANN M, SCHMIDT A, MALLET C, et al. Contextual classification of point cloud data by exploiting individual 3D neigbourhoods[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2015, 2(3): 271-278. |
| [6] |
胡鑫, 王心宇, 钟燕飞. 基于自适应上下文聚合网络的双高遥感影像分类[J]. 测绘学报, 2023, 52(7): 1175-1186. DOI: .
doi: 10.11947/j.AGCS.2023.20220237 |
|
HU Xin, WANG Xinyu, ZHONG Yanfei. Adaptive context aggregation network for H2 remote sensing imagery classification[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(7): 1175-1186. DOI: .
doi: 10.11947/J.AGCS.2023.20220237 |
|
| [7] | SHEN Yanyun, LIU Di, ZHANG Feizhao, et al. Fast and accurate multi-class geospatial object detection with large-size remote sensing imagery using CNN and truncated NMS[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2022, 191: 235-249. |
| [8] | WAN Jie, XIE Zhong, XU Yongyang, et al. DA-RoadNet: a dual-attention network for road extraction from high resolution satellite imagery[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 6302-6315. |
| [9] | JARITZ M, GU Jiayuan, SU Hao. Multi-view PointNet for 3D scene understanding[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision Workshop. Seoul: IEEE, 2019: 3995-4003. |
| [10] | WANG Yanjun, LI Shaochun, WANG Mengjie, et al. A simple deep learning network for classification of 3D mobile LiDAR point clouds[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(3): 49-59. |
| [11] | ROBERT D, VALLET B, LANDRIEU L. Learning multi-view aggregation in the wild for large-scale 3D semantic segmentation[C]//Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans: IEEE, 2022: 5565-5574. |
| [12] | MENG H Y, GAO Lin, LAI Yukun, et al. VV-Net: voxel VAE net with group convolutions for point cloud segmentation[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 8499-8507. |
| [13] | POUX F, BILLEN R. Voxel-based 3D point cloud semantic segmentation: unsupervised geometric and relationship featuring vs deep learning methods[J]. ISPRS International Journal of Geo-Information, 2019, 8(5): 213. |
| [14] | LI Huchen, GUAN Haiyan, MA Lingfei, et al. MVPNet: a multi-scale voxel-point adaptive fusion network for point cloud semantic segmentation in urban scenes[J]. International Journal of Applied Earth Observation and Geoinformation, 2023, 122: 103391. |
| [15] | CHARLES R Q, SU H, KAICHUN M, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 77-85. |
| [16] | HAN Xu, DONG Zhen, YANG Bisheng. A point-based deep learning network for semantic segmentation of MLS point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2021, 175: 199-214. |
| [17] |
蒋腾平, 王永君, 张林淇, 等. 融合CNN和MRF的激光点云层次化语义分割方法[J]. 测绘学报, 2021, 50(2): 215-225. DOI: .
doi: 10.11947/j.AGCS.2021.20200095 |
|
JIANG Tengping, WANG Yongjun, ZHANG Linqi, et al. A LiDAR point cloud hierarchical semantic segmentation method combining CNN and MRF[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(2): 215-225. DOI: .
doi: 10.11947/j.AGCS.2021.20200095 |
|
| [18] | WANG Yue, SUN Yongbin, LIU Ziwei, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38(5): 1-12. |
| [19] | JIANG Tengping, SUN Jian, LIU Shan, et al. Hierarchical semantic segmentation of urban scene point clouds via group proposal and graph attention network[J]. International Journal of Applied Earth Observation and Geoinformation, 2021, 105: 102626. |
| [20] | WAN Jie, XU Yongyang, QIU Qinjun, et al. A geometry-aware attention network for semantic segmentation of MLS point clouds[J]. International Journal of Geographical Information Science, 2023, 37(1): 138-161. |
| [21] | LIU Yongcheng, FAN Bin, XIANG Shiming, et al. Relation-shape convolutional neural network for point cloud analysis[C]//Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2019: 8887-8896. |
| [22] | XU Mutian, DING Runyu, ZHAO Hengshuang, et al. PAConv: position adaptive convolution with dynamic kernel assembling on point clouds[C]//Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville: IEEE, 2021: 3172-3181. |
| [23] | WU Wenxuan, LI Fuxin, SHAN Qi. PointConvFormer: revenge of the point-based convolution[C]//Proceedings of 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 21802-21813. |
| [24] | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[C]//Proceeding of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 5105-5114. |
| [25] | LI Yangyan, BU Rui, SUN Mingchao, et al. PointCNN: convolution x-transformed points[C]//Proceedings of the 32nd Conference on Neural Information Processing Systems. NowYork: Curran Associates, 2018: 820-830. |
| [26] | ZHAO Hengshuang, JIANG Li, FU C W, et al. PointWeb: enhancing local neighborhood features for point cloud processing[C]//Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2019: 5560-5568. |
| [27] | HU Qingyong, YANG Bo, XIE Linhai, et al. RandLA-Net: efficient semantic segmentation of large-scale point clouds[C]//Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 11105-11114. |
| [28] | LI Yong, LI Xu, ZHANG Zhenxin, et al. DenseKPNET: dense kernel point convolutional neural networks for point cloud semantic segmentation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1-13. |
| [29] | NIE Dong, LAN Rui, WANG Ling, et al. Pyramid architecture for multi-scale processing in point cloud segmentation[C]//Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans: IEEE, 2022: 17263-17273. |
| [30] | HUANG Gao, LIU Zhuang, VAN DER MAATEN L, et al. Densely connected convolutional networks[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 2261-2269. |
| [31] | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30: 5998-6008. |
| [32] | LEE C Y, XIE S, GALLAGHER P, et al. Deeply-supervised nets[EB/OL]. [2023-02-04]. https://arxiv.org/abs/1409.5185. |
| [33] | TAN Weikai, QIN Nannan, MA Lingfei, et al. Toronto-3D: a large-scale mobile LiDAR dataset for semantic segmentation of urban roadways[C]//Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Seattle: IEEE, 2020: 797-806. |
| [34] | WANG Lei, HUANG Yuchun, SHAN Jie, et al. MSNet: multi-scale convolutional network for point cloud classification[J]. Remote Sensing, 2018, 10(4): 612. |
| [35] | SHUAI Hui, XU Xiang, LIU Qingshan. Backward attentive fusing network with local aggregation classifier for 3D point cloud semantic segmentation[J]. IEEE Transactions on Image Processing, 2021, 30: 4973-4984. |
| [36] | XU Yongyang, TANG Wei, ZENG Ziyin, et al. NeiEA-NET: semantic segmentation of large-scale point cloud scene via neighbor enhancement and aggregation[J]. International Journal of Applied Earth Observation and Geoinformation, 2023, 119: 103285. |
| [1] | 王泽矫, 向隆刚, 王猛, 王兴娟, 刘清. 融合层级特征与多样化注意力的道路面与中心线协同提取网络[J]. 测绘学报, 2026, 55(3): 548-563. |
| [2] | 胡波, 陈翰新, 任松, 屈英豪, 刘清屹, 涂歆玥, 王大涛. 一种基于分割掩码的隧道裂缝病害自动识别后处理算法[J]. 测绘学报, 2024, 53(9): 1715-1724. |
| [3] | 鄢薪, 慎利, 潘俊杰, 戴延帅, 王继成, 郑晓莉, 李志林. 多尺度特征融合与空间优化的弱监督高分遥感建筑变化检测[J]. 测绘学报, 2024, 53(8): 1586-1597. |
| [4] | 徐涛, 杨元维, 高贤君, 王志威, 潘越, 李少华, 许磊, 王艳军, 刘波, 余静, 吴凤敏, 孙浩宇. 融合图卷积与多尺度特征的接触网点云语义分割[J]. 测绘学报, 2024, 53(8): 1624-1633. |
| [5] | 林云浩, 王艳军, 李少春, 蔡恒藩. 一种耦合DeepLab与Transformer的农作物种植类型遥感精细分类方法[J]. 测绘学报, 2024, 53(2): 353-366. |
| [6] | 孙根云, 孙超, 张爱竹. 融合多尺度与边缘特征的道路提取网络[J]. 测绘学报, 2024, 53(12): 2233-2243. |
| [7] | 庞世燕, 郝京京, 左志奇, 兰晶晶, 胡翔云. 融合密集连接和自注意力机制的高分辨率遥感影像变化检测方法[J]. 测绘学报, 2024, 53(12): 2244-2253. |
| [8] | 张银胜, 陈戈, 段修贤, 童俊毅, 单梦姣, 单慧琳. 基于多层特征信息融合的滑坡图像分割模型[J]. 测绘学报, 2024, 53(11): 2201-2212. |
| [9] | 刘家兴, 黄玉春, 石文轩, 叶曦, 杨鹤. 顾及拓扑结构的道路标线提取[J]. 测绘学报, 2024, 53(11): 2213-2227. |
| [10] | 胡功明, 杨春成, 徐立, 尚海滨, 王泽凡, 秦志龙. 改进U-Net的遥感图像语义分割方法[J]. 测绘学报, 2023, 52(6): 980-989. |
| [11] | 刘帅, 李笑迎, 于梦, 邢光龙. 高分辨率遥感图像双解耦语义分割网络模型[J]. 测绘学报, 2023, 52(4): 638-647. |
| [12] | 沈秭扬, 倪欢, 管海燕. 遥感图像跨域语义分割的无监督域自适应对齐方法[J]. 测绘学报, 2023, 52(12): 2115-2126. |
| [13] | 张荣庭, 张广运, 尹继豪. 复杂城市动态图卷积网络三维场景语义分割法[J]. 测绘学报, 2023, 52(10): 1703-1713. |
| [14] | 李佳田, 杨汝春, 姚彦吉, 贺日兴, 阿晓荟, 吕少云. 结合多尺度共享编码的半监督网络航空影像语义分割[J]. 测绘学报, 2022, 51(11): 2355-2364. |
| [15] | 蒋腾平, 王永君, 张林淇, 梁冲, 孙剑. 融合CNN和MRF的激光点云层次化语义分割方法[J]. 测绘学报, 2021, 50(2): 215-225. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||