


测绘学报 ›› 2025, Vol. 54 ›› Issue (12): 2153-2167.doi: 10.11947/j.AGCS.2025.20250057
陈健1,2,3( ), 王佳辉1,2,3, 赵兴旺1,2,3, 刘超1,2,3(), 刘春阳1,2,3, 余学祥1,2,3
), 王佳辉1,2,3, 赵兴旺1,2,3, 刘超1,2,3(), 刘春阳1,2,3, 余学祥1,2,3
收稿日期:2025-02-14
修回日期:2025-10-28
出版日期:2026-01-15
发布日期:2026-01-15
通讯作者:
刘超
E-mail:cj_19930815@163.com;chliu1@aust.edu.cn
作者简介:陈健(1993—),男,博士,讲师,研究方向为多频多模GNSS精密定位。 E-mail:cj_19930815@163.com
基金资助:
Jian CHEN1,2,3(), Jiahui WANG1,2,3, Xingwang ZHAO1,2,3, Chao LIU1,2,3(), Chunyang LIU1,2,3, Xuexiang YU1,2,3
Received:2025-02-14
Revised:2025-10-28
Online:2026-01-15
Published:2026-01-15
Contact:
Chao LIU
E-mail:cj_19930815@163.com;chliu1@aust.edu.cn
About author:CHEN Jian (1993—), male, PhD, lecturer, majors in multi-frequency multi-system GNSS satellite precise positioning. E-mail: cj_19930815@163.com
Supported by:摘要:
针对中长基线单历元解算易受到电离层延迟影响,造成窄巷模糊度解算可靠性降低的问题,本文系统分析了BDS-3和Galileo具有低总噪声水平和弱电离层延迟的多频相位组合观测值特性,在此基础上提出了一种基于BDS-3/Galileo多频弱电离层组合的单历元RTK定位优化方法,并采用实测数据进行验证。试验结果表明,本文方法采用的多频弱电离层组合,分别为BDS-3(2,2,-3,0)、Galileo(4,0,-2,-1)的四频组合和BDS-3(2,2,-3,0,0)、Galileo(4,-2,0,-1,0)的五频组合。在BDS-3、Galileo及BDS-3/Galileo组合系统中的定位精度均优于传统方法,其中四频和五频的三维定位精度分别平均提高了18.87%、24.84%、41.47%,以及12.97%、25.52%、42.07%,特别在电离层活跃区,BDS-3/Galileo五频弱电离层组合模糊度固定成功率可保持在99.00%以上。在高截止高度角(如30°)时,BDS-3/Galileo的定位可用性仍达到100%。因此,BDS-3/Galileo组合多频观测值有效提高了定位可用性和可靠性。
中图分类号:
陈健, 王佳辉, 赵兴旺, 刘超, 刘春阳, 余学祥. BDS-3/Galileo星座多频弱电离层组合单历元RTK定位优化方法[J]. 测绘学报, 2025, 54(12): 2153-2167.
Jian CHEN, Jiahui WANG, Xingwang ZHAO, Chao LIU, Chunyang LIU, Xuexiang YU. Single-epoch RTK positioning optimization method based on BDS-3/Galileo multi-frequency ionosphere-reduced combinations[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(12): 2153-2167.
表1
BDS-3与Galileo的三频EWL/WL组合观测值特性"
| 不同系统 | 组合系数 | λ(3)/m | β(3) | σTL/cycle | |||
|---|---|---|---|---|---|---|---|
| a1 | a2 | a3 | d≤20 km | 20<d≤100 km | |||
| BDS-3(B1C,B2a,B3I) | 0 | -1 | 1 | 3.256 1 | -1.663 1 | 0.063 2 | 0.163 9 |
| 1 | 2 | -3 | 2.442 1 | -0.610 2 | 0.158 8 | 0.175 4 | |
| 1 | 1 | -2 | 1.395 5 | -1.061 4 | 0.113 9 | 0.252 7 | |
| Galileo(E1,E5a,E5b) | 0 | -1 | 1 | 9.768 4 | -1.747 7 | 0.056 9 | 0.077 8 |
| 1 | 3 | -4 | 1.085 4 | -1.157 6 | 0.213 3 | 0.381 4 | |
| 1 | 2 | -3 | 0.976 8 | -1.216 6 | 0.165 8 | 0.404 7 | |
表2
BDS-3与Galileo的四频EWL/WL组合观测值特性"
| 不同系统 | 组合系数 | λ(4)/m | β(4) | σTL/cycle | ||||
|---|---|---|---|---|---|---|---|---|
| a1 | a2 | a3 | a4 | d≤20 km | 20<d≤100 km | |||
| BDS-3(B1C,B1I,B2a,B3I) | 1 | -1 | 0 | 0 | 20.932 3 | -1.009 2 | 0.074 0 | 0.075 4 |
| 0 | 0 | -1 | 1 | 3.256 1 | -1.663 1 | 0.0632 | 0.163 9 | |
| -1 | 2 | 2 | -3 | 3.185 4 | -0.488 7 | 0.189 6 | 0.195 1 | |
| 0 | 1 | 2 | -3 | 2.764 6 | -0.557 5 | 0.158 4 | 0.169 5 | |
| 1 | 0 | 2 | -3 | 2.442 1 | -0.610 2 | 0.158 8 | 0.175 4 | |
| Galileo(E1,E6,E5a,E5b) | 0 | 0 | -1 | 1 | 9.768 4 | -1.747 7 | 0.056 9 | 0.077 8 |
| 0 | 1 | 1 | -2 | 7.326 3 | -1.503 0 | 0.099 8 | 0.116 9 | |
| 0 | 1 | 0 | -1 | 4.186 5 | -1.607 9 | 0.061 8 | 0.129 4 | |
| 1 | -3 | 2 | 0 | 3.256 1 | -0.303 5 | 0.159 1 | 0.161 7 | |
| 1 | -2 | 1 | 0 | 1.542 4 | -1.012 1 | 0.112 7 | 0.225 0 | |
表3
BDS-3与Galileo的五频EWL/WL组合观测值特性"
| 不同系统 | 组合系数 | λ(5)/m | β(5) | σTL/cycle | |||||
|---|---|---|---|---|---|---|---|---|---|
| a1 | a2 | a3 | a4 | a5 | d≤20 km | 20<d≤100 km | |||
| BDS-3(B1C,B1I,B2a,B2b,B3I) | 1 | -1 | 0 | 0 | 0 | 20.932 3 | -1.009 2 | 0.074 0 | 0.075 4 |
| 0 | 0 | -1 | 1 | 0 | 9.768 4 | -1.747 7 | 0.056 9 | 0.077 8 | |
| 0 | 0 | 0 | -1 | 1 | 4.884 2 | -1.620 8 | 0.060 8 | 0.115 5 | |
| 0 | 0 | -1 | 0 | 1 | 3.256 1 | -1.663 1 | 0.063 2 | 0.163 9 | |
| 1 | -1 | -1 | 0 | 1 | 2.817 8 | -1.575 1 | 0.098 0 | 0.192 4 | |
| 0 | 1 | 2 | 0 | -3 | 2.764 6 | -0.557 5 | 0.158 4 | 0.169 5 | |
| 0 | 1 | 1 | 1 | -3 | 2.154 8 | -0.820 0 | 0.149 6 | 0.187 5 | |
| Galileo(E1,E5a,E5b,E5,E6) | 0 | -1 | 0 | 1 | 0 | 19.536 8 | -1.770 2 | 0.056 0 | 0.062 1 |
| 0 | 0 | 1 | -1 | 0 | 19.536 8 | -1.725 2 | 0.056 8 | 0.062 5 | |
| 0 | -1 | 1 | 0 | 0 | 9.768 4 | -1.747 7 | 0.056 9 | 0.077 8 | |
| 0 | 0 | -1 | 0 | 1 | 4.186 5 | -1.607 9 | 0.061 8 | 0.129 4 | |
| 1 | 2 | 0 | 0 | -3 | 3.256 1 | -0.303 5 | 0.159 1 | 0.161 7 | |
| 1 | 1 | 0 | 1 | -3 | 2.791 0 | -0.513 1 | 0.149 5 | 0.159 3 | |
| 1 | 1 | 1 | 0 | -3 | 2.442 1 | -0.664 6 | 0.150 0 | 0.170 5 | |
| 1 | 1 | -1 | 1 | -2 | 1.674 6 | -0.951 0 | 0.125 0 | 0.209 9 | |
| 1 | 1 | 0 | 0 | -2 | 1.542 4 | -1.012 1 | 0.112 7 | 0.225 0 | |
表4
BDS-3与Galileo三频、四频、五频观测值满足条件的NL组合特性"
| 不同系统 | 组合系数 | λ(n)/m | β(n) | σTL/cycle | |||||
|---|---|---|---|---|---|---|---|---|---|
| a1 | a2 | a3 | a4 | a5 | σ∇ΔI1=5 cm | σ∇ΔI1=25 cm | |||
| BDS-3 | 1 | 0 | 0 | 0.190 3 | 1 | 0.273 3 | 1.321 6 | ||
| 4 | -3 | 0 | 0.108 1 | -0.009 9 | 0.258 9 | 0.337 9 | |||
| 2 | 2 | -3 | 0 | 0.109 3 | 0.000 5 | 0.210 9 | 0.300 3 | ||
| 2 | 2 | -3 | 0 | 0 | 0.109 3 | 0.000 5 | 0.210 9 | 0.300 3 | |
| 2 | 3 | 0 | -1 | -3 | 0.106 3 | -0.001 9 | 0.249 8 | 0.332 8 | |
| 3 | 1 | -1 | -3 | 1 | 0.108 7 | -0.001 9 | 0.233 0 | 0.317 0 | |
| Galileo | 1 | 0 | 0 | 0.190 3 | 1 | 0.273 3 | 1.321 6 | ||
| 4 | -2 | -1 | 0.109 3 | 0.009 6 | 0.246 5 | 0.326 8 | |||
| 4 | -3 | 0 | 0.108 1 | -0.009 9 | 0.258 9 | 0.337 9 | |||
| 4 | 0 | -2 | -1 | 0.109 3 | 0.009 6 | 0.246 5 | 0.326 8 | ||
| 4 | 0 | -3 | 0 | 0.108 1 | -0.009 9 | 0.258 9 | 0.337 9 | ||
| 4 | -3 | -1 | 1 | 0 | 0.108 7 | -0.000 3 | 0.264 7 | 0.340 9 | |
| 4 | -2 | 0 | -1 | 0 | 0.108 7 | -0.000 1 | 0.246 4 | 0.327 0 | |
| 4 | -1 | 1 | -3 | 0 | 0.108 7 | 0.000 2 | 0.265 3 | 0.341 4 | |
| 4 | 0 | -3 | -1 | 1 | 0.108 3 | -0.002 9 | 0.266 5 | 0.342 9 | |

图1
基于BDS-3/Galileo多频弱电离层组合的单历元RTK定位方法整体流程"

表5
基线信息"
| 数据集 | 基线 | 年积日 | 长度/km | 观测时长/h | 采样间隔/s | 接收机类型 | 位置 |
|---|---|---|---|---|---|---|---|
| A | STR1-TID1 | 2025-128 | 9.7 | 24 | 30 | SEPT POLARX5 | 澳大利亚 堪培拉 |
| B | LYSK-NJGY | 2025-199 | 29.9 | 24 | 30 | NET20 PLUS/HEMI_DF5r | 中国 南京 |
| C | CEBR-VILL | 2025-14 | 35.3 | 24 | 30 | SEPT POLARX5 | 西班牙 阿维拉•马德里 |
表6
BDS-3/Galileo TCAR中组合观测值选取方案"
| 系统 | 方案 | TC-Ⅰ | TC-Ⅱ | TC-Ⅲ | |
|---|---|---|---|---|---|
| BDS-3 | 1 | (0,-1,1) | (1,1,-2) | (1,0,0) | (4,-3,0) |
| 2 | (1,2,-3) | ||||
| Galileo | 3 | (0,-1,1) | (1,2,-3) | (1,0,0) | (4,-2,-1) |
| 4 | (1,3,-4) | ||||
表7
BDS-3和Galileo TCAR各组合方案的模糊度固定成功率"
| 系统 | 数据集 | 方案 | TC-Ⅰ | TC-Ⅱ | BF | IR |
|---|---|---|---|---|---|---|
| BDS-3 | A | 1 | 100 | 100 | 97.92 | 99.97 |
| 2 | 100 | 100 | 97.92 | 99.97 | ||
| B | 1 | 100 | 100 | 79.93 | 90.69 | |
| 2 | 100 | 100 | 79.93 | 90.69 | ||
| C | 1 | 100 | 99.73 | 73.30 | 80.52 | |
| 2 | 100 | 99.20 | 73.19 | 80.52 | ||
| Galileo | A | 3 | 100 | 90.10 | 99.44 | 99.48 |
| 4 | 100 | 83.58 | 99.27 | 99.41 | ||
| C | 3 | 100 | 64.19 | 73.97 | 81.61 | |
| 4 | 100 | 61.06 | 74.47 | 81.69 |
表8
BDS-3/Galileo TCAR的模糊度固定成功率"
| 数据集 | TC-Ⅰ | TC-Ⅱ | BF | IR |
|---|---|---|---|---|
| A | 99.97 | 99.97 | 99.97 | 99.97 |
| C | 100 | 97.22 | 95.35 | 97.64 |
表9
BDS-3与Galileo QCAR中组合观测值选取方案"
| 系统 | 方案 | QC-Ⅰ | QC-Ⅱ | QC-Ⅲ | QC-Ⅳ | |
|---|---|---|---|---|---|---|
| BDS-3 | 5 | (0,0,-1,1) | (0,1,2,-3) | |||
| 6 | (1,-1,0,0) | (0,0,-1,1) | (1,0,2,-3) | (1,0,0,0) | (2,2,-3,0) | |
| 7 | (0,0,-1,1) | (-1,2,2,-3) | ||||
| Galileo | 8 | (0,1,1,-2) | (1,-3,2,0) | |||
| 9 | (0,0,-1,1) | (0,1,0,-1) | (1,-3,2,0) | (1,0,0,0) | (4,0,-2,-1) | |
| 10 | (0,1,0,-1) | (1,-2,1,0) | ||||
表10
BDS-3与Galileo QCAR不同组合方案的模糊度固定成功率"
| 系统 | 数据集 | 方案 | QC-Ⅰ | QC-Ⅱ | QC-Ⅲ | BF | IR |
|---|---|---|---|---|---|---|---|
| BDS-3 | A | 5 | 100 | 100 | 100 | 99.97 | 99.97 |
| 6 | 100 | 100 | 100 | 99.97 | 99.97 | ||
| 7 | 100 | 100 | 100 | 99.97 | 99.97 | ||
| B | 5 | 100 | 100 | 100 | 93.35 | 98.49 | |
| 6 | 100 | 100 | 100 | 93.35 | 98.49 | ||
| 7 | 100 | 100 | 100 | 93.35 | 98.49 | ||
| C | 5 | 100 | 100 | 99.88 | 82.35 | 86.01 | |
| 6 | 100 | 100 | 99.76 | 82.35 | 86.01 | ||
| 7 | 100 | 100 | 99.92 | 82.35 | 86.01 | ||
| Galileo | A | 8 | 100 | 100 | 99.93 | 99.90 | 99.93 |
| 9 | 100 | 100 | 99.93 | 99.90 | 99.93 | ||
| 10 | 100 | 100 | 100 | 99.90 | 99.93 | ||
| C | 8 | 100 | 100 | 97.44 | 85.38 | 89.79 | |
| 9 | 100 | 100 | 99.22 | 85.56 | 89.36 | ||
| 10 | 100 | 100 | 99.72 | 85.56 | 89.40 |
表11
BDS-3/Galileo QCAR的模糊度固定成功率"
| 数据集 | QC-Ⅰ | QC-Ⅱ | QC-Ⅲ | BF | IR |
|---|---|---|---|---|---|
| A | 100 | 100 | 100 | 99.97 | 99.97 |
| C | 100 | 100 | 99.24 | 96.35 | 97.74 |

图2
数据集A的NL组合定位误差及其相应的RMS值"
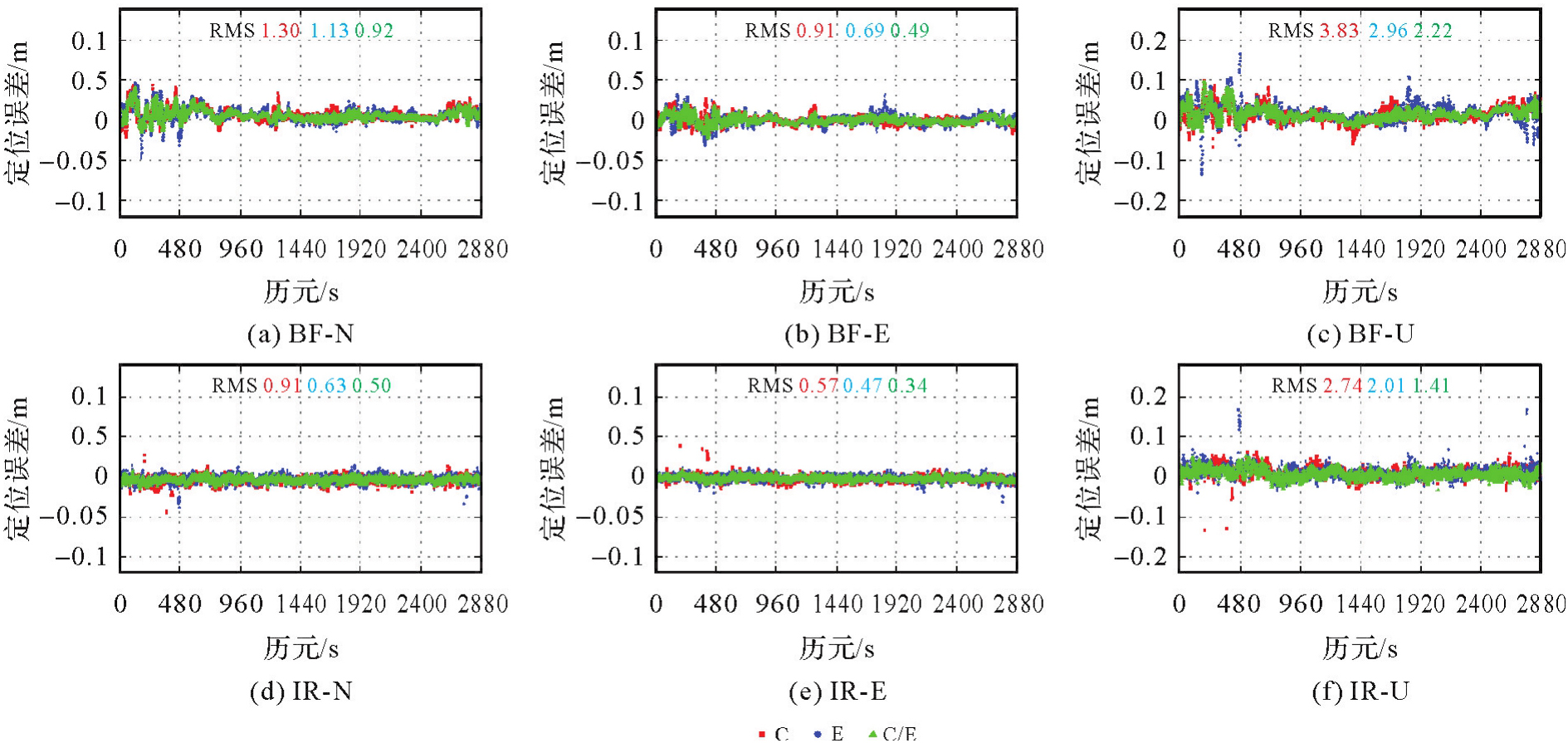
表12
IR组合在3种解算模式下较BF的定位精度提升比例"
| 数据集 | 方向 | BDS-3 | Galileo | BDS-3/Galileo |
|---|---|---|---|---|
| A | N | 30.00 | 44.25 | 45.65 |
| E | 37.26 | 31.88 | 30.61 | |
| U | 28.46 | 32.09 | 36.49 | |
| 水平 | 32.33 | 40.63 | 41.99 | |
| 三维 | 29.01 | 33.44 | 37.45 | |
| C | N | 30.85 | 35.63 | 65.14 |
| E | 20.56 | 22.57 | 72.91 | |
| U | 2.22 | 13.04 | 33.49 | |
| 水平 | 24.16 | 27.15 | 70.73 | |
| 三维 | 8.72 | 16.23 | 45.49 |
表13
BDS-3与Galileo PCAR中组合观测值选取方案"
| 系统 | 方案 | PC-Ⅰ | PC-Ⅱ | PC-Ⅲ | PC-Ⅳ | PC-Ⅴ |
|---|---|---|---|---|---|---|
| BDS-3 | 11 | (0,0,-1,1,0) | (1,-1,0,0,0) | (0,0,0,-1,1) | (0,1,2,0,-3) | (1,0,0,0,0)(2,2,-3,0,0) |
| 12 | (1,-1,0,0,0) | (0,0,-1,0,1) | (0,1,2,0,-3) | |||
| 13 | (1,-1,0,0,0) | (0,0,0,-1,1) | (0,1,1,1,-3) | |||
| 14 | (0,0,-1,0,1) | (0,1,1,1,-3) | (1,-1,-1,0,1) | |||
| Galileo | 15 | (0,-1,0,1,0) | (0,0,1,-1,0) | (1,1,-1,1,-2) | (1,2,0,0,-3) | (1,0,0,0,0)(4,-2,0,-1,0) |
| 16 | (0,0,-1,0,1) | (1,1,1,0,-3) | (1,1,-1,1,-2) | |||
| 17 | (0,-1,1,0,0) | (0,0,-1,0,1) | (1,1,0,1,-3) | (1,1,0,0,-2) |
表14
BDS-3 PCAR各方案下模糊度固定成功率"
| 数据集 | 方案 | PC-Ⅰ | PC-Ⅱ | PC-Ⅲ | PC-Ⅳ | BF | IR |
|---|---|---|---|---|---|---|---|
| A | 11 | 100 | 100 | 100 | 100 | 99.51 | 99.55 |
| 12 | 100 | 100 | 100 | 100 | 99.51 | 99.55 | |
| 13 | 100 | 100 | 100 | 100 | 99.51 | 99.55 | |
| 14 | 100 | 100 | 100 | 100 | 99.51 | 99.55 | |
| B | 11 | 100 | 100 | 100 | 100 | 94.96 | 98.42 |
| 12 | 100 | 100 | 100 | 100 | 94.96 | 98.42 | |
| 13 | 100 | 100 | 100 | 100 | 94.96 | 98.42 | |
| 14 | 100 | 100 | 100 | 99.96 | 94.96 | 98.42 | |
| C | 11 | 100 | 100 | 100 | 99.88 | 82.71 | 86.82 |
| 12 | 100 | 100 | 100 | 99.92 | 82.71 | 86.98 | |
| 13 | 100 | 100 | 100 | 99.76 | 82.67 | 86.78 | |
| 14 | 100 | 100 | 99.88 | 99.36 | 82.71 | 86.82 |
表15
Galileo PCAR各方案下模糊度固定成功率"
| 数据集 | 方案 | PC-Ⅰ | PC-Ⅱ | PC-Ⅲ | PC-Ⅳ | BF | IR |
|---|---|---|---|---|---|---|---|
| A | 15 | 100 | 100 | 100 | 100 | 99.97 | 100 |
| 16 | 100 | 100 | 99.97 | 100 | 99.97 | 100 | |
| 17 | 100 | 100 | 99.93 | 100 | 99.97 | 100 | |
| C | 15 | 100 | 100 | 99.29 | 99.40 | 86.94 | 90.15 |
| 16 | 100 | 100 | 99.18 | 99.86 | 86.94 | 90.07 | |
| 17 | 100 | 100 | 99.22 | 99.75 | 86.98 | 90.11 |
表16
BDS-3/Galileo PCAR各方案下模糊度固定成功率"
| 数据集 | PC-Ⅰ | PC-Ⅱ | PC-Ⅲ | PC-Ⅳ | BF | IR |
|---|---|---|---|---|---|---|
| A | 100 | 100 | 100 | 100 | 99.93 | 99.97 |
| C | 100 | 100 | 100 | 99.86 | 97.29 | 98.30 |
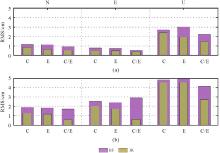
图3
3种解算模式下窄巷组合定位的均方根值结果"
图4
连续30 d地磁活动指数变化趋势"
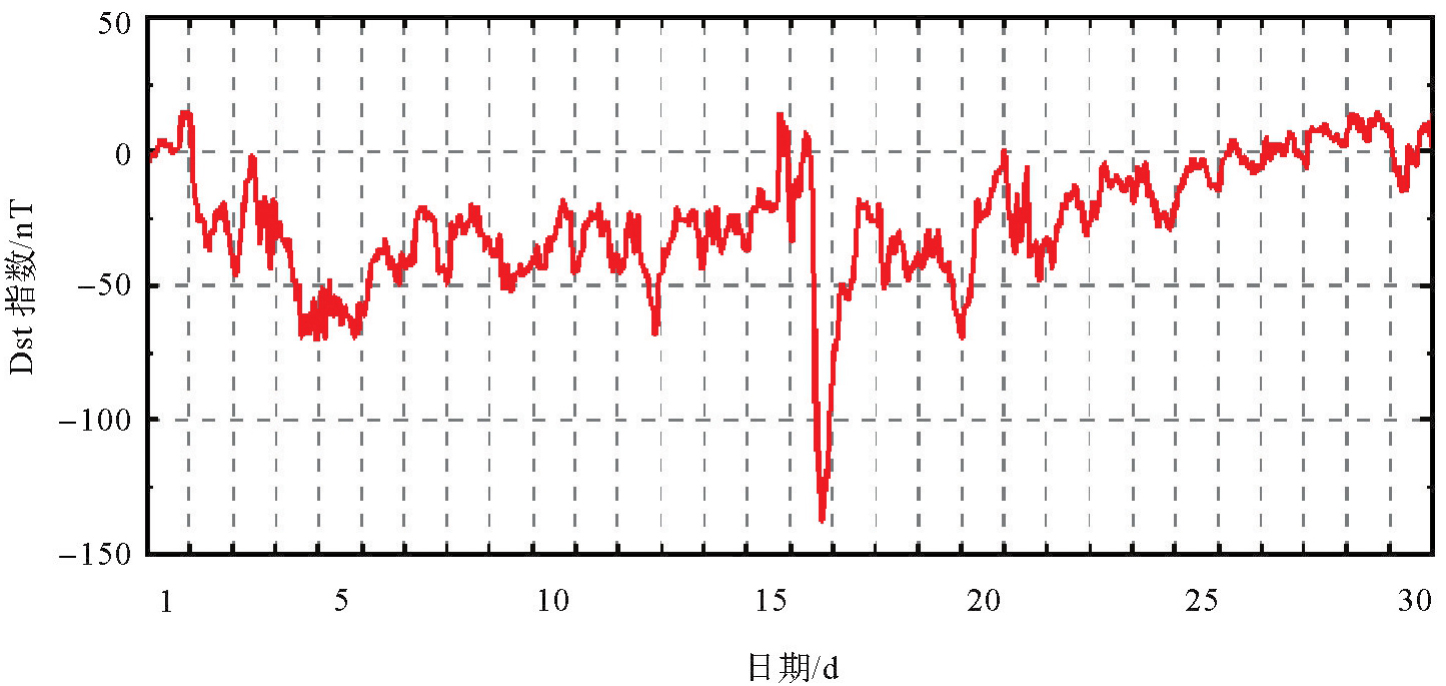
表17
电离层活跃期BDS-3/Galileo PCAR模糊度固定性能对比"
| 数据集 | PC-Ⅰ | PC-Ⅱ | PC-Ⅲ | PC-Ⅳ | BF | IR |
|---|---|---|---|---|---|---|
| A | 100 | 100 | 99.55 | 100 | 99.90 | 100 |
| C | 100 | 100 | 96.42 | 98.72 | 99.76 | 99.83 |
表18
BDS-3/Galileo PCAR电离层活跃区的三维定位的均方根值"
| 数值集 | BF/cm | IR/cm | 提升/(%) |
|---|---|---|---|
| A | 4.45 | 1.64 | 63.15 |
| C | 6.54 | 3.51 | 46.33 |
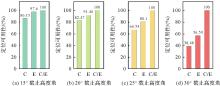
图5
不同截止高度角下3种解算模式的定位可用性"
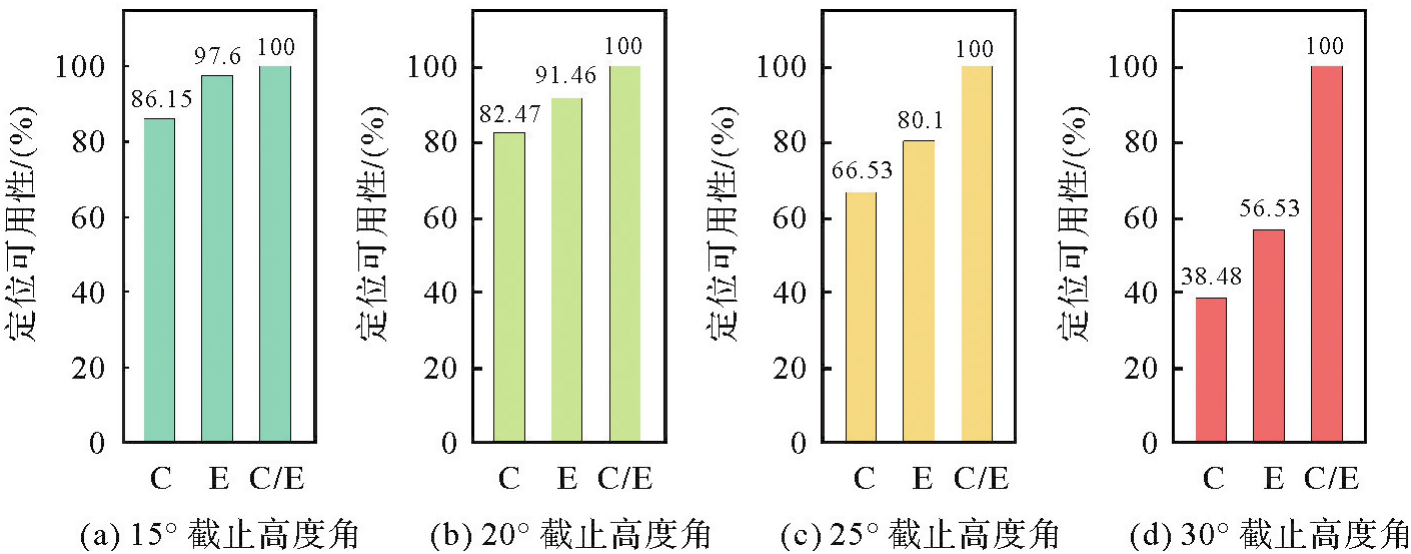
表19
不同截止高度角下3种解算模式的单历元模糊度解算成功率对比"
| 窄巷组合 | 截止高度角 | BDS-3 | Galileo | BDS-3/Galileo |
|---|---|---|---|---|
| BF | 15° | 82.35 | 85.56 | 96.35 |
| 20° | 83.71 | 86.26 | 97.92 | |
| 25° | 82.15 | 86.43 | 96.74 | |
| 30° | 89.44 | 83.66 | 93.75 | |
| IR | 15° | 86.01 | 89.40 | 98.40 |
| 20° | 86.27 | 88.80 | 98.37 | |
| 25° | 86.38 | 89.42 | 98.68 | |
| 30° | 92.96 | 87.41 | 97.57 |
表20
窄巷组合定位RMS随截止高度角的变化结果"
| 窄巷组合 | 截止高度角 | BDS-3 | Galileo | BDS-3/Galileo | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| N | E | U | N | E | U | N | E | U | ||
| BF | 15° | 1.88 | 2.48 | 4.51 | 1.74 | 2.26 | 5.06 | 1.75 | 2.99 | 4.18 |
| 20° | 1.87 | 2.40 | 4.37 | 1.82 | 2.34 | 4.98 | 1.79 | 2.85 | 4.49 | |
| 25° | 1.73 | 1.99 | 3.70 | 1.94 | 2.43 | 5.15 | 1.87 | 2.67 | 4.60 | |
| 30° | 1.23 | 1.73 | 3.08 | 2.09 | 2.14 | 4.78 | 1.84 | 2.49 | 4.87 | |
| IR | 15° | 1.30 | 1.97 | 4.41 | 1.12 | 1.75 | 4.40 | 0.61 | 0.81 | 2.78 |
| 20° | 1.18 | 1.84 | 4.14 | 1.10 | 1.79 | 4.49 | 0.55 | 0.56 | 2.55 | |
| 25° | 1.35 | 1.89 | 4.24 | 1.14 | 1.93 | 4.46 | 0.59 | 0.67 | 2.42 | |
| 30° | 1.36 | 1.58 | 3.88 | 1.54 | 1.63 | 3.94 | 0.68 | 0.79 | 2.64 | |

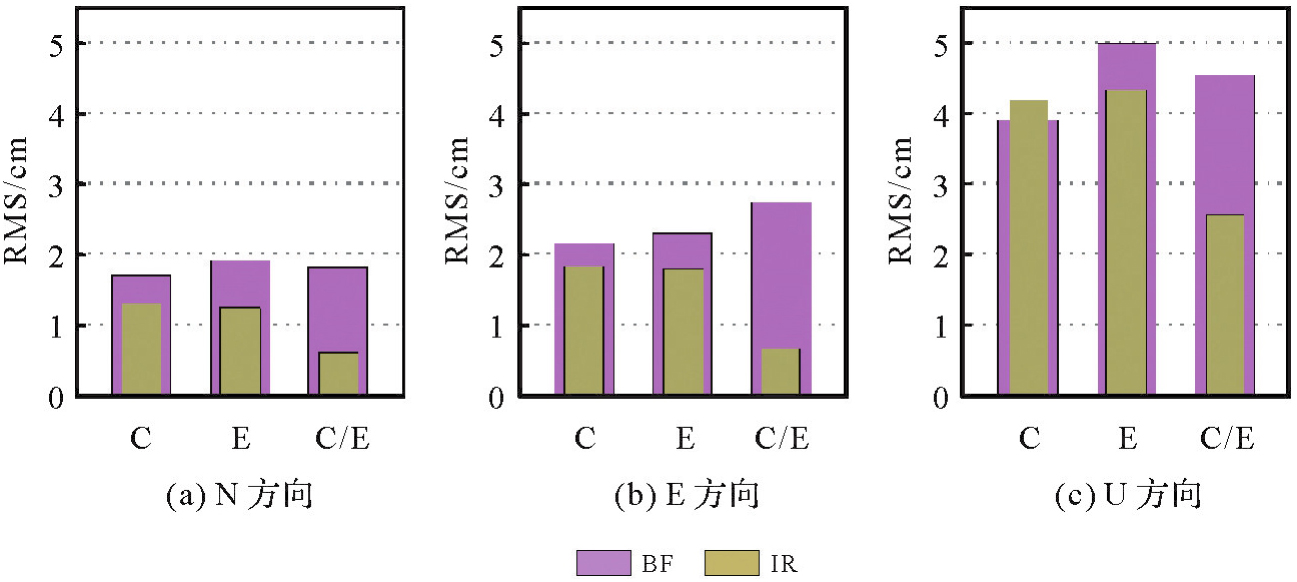
图6
数据集C在4种高度角下定位的平均均方根值"
| [1] |
张勤, 白正伟, 黄观文, 等. GNSS滑坡监测预警技术进展[J]. 测绘学报, 2022, 51(10): 1985-2000. DOI: .
doi: 10.11947/j.AGCS.2022.20220299 |
|
ZHANG Qin, BAI Zhengwei, HUANG Guanwen, et al. Review of GNSS landslide monitoring and early warning[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(10): 1985-2000. DOI: .
doi: 10.11947/j.AGCS.2022.20220299 |
|
| [2] | 王坚, 于亦龙, 柳根, 等. 超高层建筑变形GNSS多源融合监测方法及进展[J]. 武汉大学学报(信息科学版), 2025, 50(6): 1065-1076. |
| WANG Jian, YU Yilong, LIU Gen, et al. Method and progress for GNSS multi-source fusion deformation monitoring in super-tall buildings[J]. Geomatics and Information Science of Wuhan University, 2025, 50(6): 1065-1076. | |
| [3] | 刘善军, 吴立新, 毛亚纯, 等. 天-空-地协同的露天矿边坡智能监测技术及典型应用[J]. 煤炭学报, 2020, 45(6): 2265-2276. |
| LIU Shanjun, WU Lixin, MAO Yachun, et al. Spaceborne-airborne-ground collaborated intelligent monitoring on open-pit slope and its typical applications[J]. Journal of China Coal Society, 2020, 45(6): 2265-2276. | |
| [4] | DENG Chenlong, TANG Weiming, LIU Jingnan, et al. Reliable single-epoch ambiguity resolution for short baselines using combined GPS/BeiDou system[J]. GPS Solutions, 2014, 18(3): 375-386. |
| [5] | PARKINS A. Increasing GNSS RTK availability with a new single-epoch batch partial ambiguity resolution algorithm[J]. GPS Solutions, 2011, 15(4): 391-402. |
| [6] | HE Haibo, LI Jinlong, YANG Yuanxi, et al. Performance assessment of single- and dual-frequency BeiDou/GPS single-epoch kinematic positioning[J]. GPS Solutions, 2014, 18(3): 393-403. |
| [8] | VOLLATH U, BIRNBACH S, LANDAU L, et al. Analysis of three-carrier ambiguity resolution technique for precise relative positioning in GNSS-2[J]. Navigation, 1999, 46(1): 13-23. |
| [10] | HATCH R, JUNG J, ENGE P, et al. Civilian GPS: the benefits of three frequencies[J]. GPS Solutions, 2000, 3(4): 1-9. |
| [11] |
章浙涛, 李博峰, 何秀凤. 北斗三号多频相位模糊度无几何单历元固定方法[J]. 测绘学报, 2020, 49(9): 1139-1148. DOI: .
doi: 10.11947/j.AGCS.2020.20200325 |
|
ZHANG Zhetao, LI Bofeng, HE Xiufeng. Geometry-free single-epoch resolution of BDS-3 multi-frequency carrier ambi-guities[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(9): 1139-1148. DOI: .
doi: 10.11947/j.AGCS.2020.20200325 |
|
| [12] | GAO Yangjun, LÜ Zhiwei, ZHOU Pengjin, et al. Adaptive robust filtering algorithm for BDS medium and long baseline three carrier ambiguity resolution[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(2): 53-61. |
| [13] | ZHANG Xiaohong, HE Xiyang. Performance analysis of triple-frequency ambiguity resolution with BeiDou observations[J]. GPS Solutions, 2016, 20(2): 269-281. |
| [14] | FENG Yanming. GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals[J]. Journal of Geodesy, 2008, 82(12): 847-862. |
| [15] | FENG Y, LI B. A benefit of multiple carrier GNSS signals: regional scale network-based RTK with doubled inter-station distances[J]. Journal of Spatial Science, 2008, 53(2): 135-147. |
| [16] | 伍岳, 付小林, 李海军, 等. TCAR/MCAR方法在不同距离基线模糊度求解中的应用[J]. 武汉大学学报(信息科学版), 2007, 32(2): 172-175. |
| WU Yue, FU Xiaolin, LI Haijun, et al. Application of TCAR/MCAR method in different baseline ambiguity resolution[J]. Geomatics and Information Science of Wuhan University, 2007, 32(2): 172-175. | |
| [17] | 李博峰, 沈云中, 周泽波. 中长基线三频GNSS模糊度的快速算法[J]. 测绘学报, 2009, 38(4): 296-301. |
| LI Bofeng, SHEN Yunzhong, ZHOU Zebo. A new method for medium and long range three frequency GNSS rapid ambiguity resolution[J]. Acta Geodaetica et Cartographica Sinica, 2009, 38(4): 296-301. | |
| [18] | LI Bofeng, FENG Yanming, SHEN Yunzhong. Three carrier ambiguity resolution: distance-independent performance demonstrated using semi-generated triple frequency GPS signals[J]. GPS Solutions, 2010, 14(2): 177-184. |
| [19] | TANG Weiming, DENG Chenlong, SHI Chuang, et al. Triple-frequency carrier ambiguity resolution for BeiDou navigation satellite system[J]. GPS Solutions, 2014, 18(3): 335-344. |
| [20] | WANG K, KHODABANDEH A, TEUNISSEN P J G. Five-frequency Galileo long-baseline ambiguity resolution with multipath mitigation[J]. GPS Solutions, 2018, 22(3): 75. |
| [21] | YANG Yuanxi, MAO Yue, SUN Bijiao. Basic performance and future developments of BeiDou global navigation satellite system[J]. Satellite Navigation, 2020, 1(1): 273-304. |
| [22] | ZHANG Zhetao, LI Bofeng, HE Xiufeng, et al. Models, methods and assessment of four-frequency carrier ambiguity resolution for BeiDou-3 observations[J]. GPS Solutions, 2020, 24(4): 96. |
| [23] | 高旺, 潘树国, 刘力玮, 等. 基于BDS-3五频超宽巷/宽巷组合的中长基线单历元定位方法[J]. 中国惯性技术学报, 2021, 29(3): 293-299. |
| GAO Wang, PAN Shuguo, LIU Liwei, et al. Medium-long-baseline single-epoch positioning method based on BDS-3 five-frequency EWL/WL combinations[J]. Journal of Chinese Inertial Technology, 2021, 29(3): 293-299. | |
| [24] | WANG Jianchao, GAO Chengfa, PENG Zihan, et al. Research on single-epoch ambiguity resolution method based on BDS-3 ionosphere-reduced combinations[J]. Measurement, 2023, 221: 113566. |
| [25] | 高旺, 潘树国, 黄功文. 基于BDS-3和Galileo多频信号弱电离层组合的中长基线RTK定位方法[J]. 中国惯性技术学报, 2020, 28(6): 783-788. |
| GAO Wang, PAN Shuguo, HUANG Gongwen. Medium-baseline RTK positioning method based on BDS-3 and Galileo multi-frequency ionosphere-reduced combinations[J]. Journal of Chinese Inertial Technology, 2020, 28(6): 783-788. | |
| [26] | HOU Yanqing, LIU Xin, ZHANG Haoli, et al. Two-step success rate criterion strategy: a model- and data-driven partial ambiguity resolution method for medium-long baselines RTK[J]. GPS Solutions, 2022, 26(4): 134. |
| [27] | 李博峰, 苗维凯, 陈广鄂. 多频多模GNSS高精度定位关键技术与挑战[J]. 武汉大学学报(信息科学版), 2023, 48(11): 1769-1783. |
| LI Bofeng, MIAO Weikai, CHEN Guang'e. Key technologies and challenges of multi-frequency and multi-GNSS high-precision positioning[J]. Geomatics and Information Science of Wuhan University, 2023, 48(11): 1769-1783. | |
| [28] | 张旭, 杨杰. 融合电离层延迟改正与多频信号优化的全球导航卫星系统部分模糊度解算方法[J]. 电子与信息学报, 2025, 47(5): 1543-1553. |
| ZHANG Xu, YANG Jie. Global navigation satellite system partial ambiguity resolution method integrating ionospheric delay correction and multi-frequency signal optimization[J]. Journal of Electronics & Information Technology, 2025, 47(5): 1543-1553. | |
| [29] | RICHERT T, EL-SHEIMY N. Optimal linear combinations of triple frequency carrier phase data from future global navigation satellite systems[J]. GPS Solutions, 2007, 11(1): 11-19. |
| [30] | LI Bofeng, LI Zhen, ZHANG Zhiteng, et al. ERTK: extra-wide-lane RTK of triple-frequency GNSS signals[J]. Journal of Geodesy, 2017, 91(9): 1031-1047. |
| [31] | 姚一飞, 高井祥, 李增科, 等. 基于模糊度相关法的北斗三频载波单历元基线解算[J]. 武汉大学学报(信息科学版), 2016, 41(11): 1433-1439. |
| YAO Yifei, GAO Jingxiang, LI Zengke, et al. BeiDou triple-frequency carrier single-epoch ambiguity resolution based on ambiguity related method[J]. Geomatics and Information Science of Wuhan University, 2016, 41(11): 1433-1439. | |
| [32] | TEUNISSEN P J G, ODOLINSKI R, ODIJK D. Instantaneous BeiDou+GPS RTK positioning with high cut-off elevation angles[J]. Journal of Geodesy, 2014, 88(4): 335-350. |
| [1] | 李军, 祝会忠, 刘智强. 北斗长距离参考站网模糊度固定中电离层参数的优化方法[J]. 测绘学报, 2025, 54(2): 221-232. |
| [2] | 李博峰, 陈龙, 袁雷童. GNSS多基线联合解算的高精度变形监测方法[J]. 测绘学报, 2025, 54(12): 2116-2128. |
| [3] | 耿江辉, 林吉航, 张启元, 温强, 曾竞, 金彪. 面向全频率非差模糊度固定的相位钟/相位偏差估计方法[J]. 测绘学报, 2024, 53(12): 2254-2267. |
| [4] | 侯鹏宇, 张宝成, 刘腾, 查九平. CDMA+FDMA非差非组合区域PPP-RTK[J]. 测绘学报, 2023, 52(2): 183-194. |
| [5] | 袁运斌, 刘帅, 潭冰峰. 基于钟差解耦的GNSS精密单点定位模糊度固定模型及效果分析[J]. 测绘学报, 2022, 51(8): 1669-1679. |
| [6] | 邓志国, 王君刚, 葛茂荣. GBM快速轨道产品及非差模糊度固定对其精度的改进[J]. 测绘学报, 2022, 51(4): 544-555. |
| [7] | 邵凯, 易彬, 张厚喆, 谷德峰. 单星模糊度固定的整数相位钟法及在低轨卫星定轨中的应用[J]. 测绘学报, 2021, 50(4): 487-495. |
| [8] | 曾添, 隋立芬, 阮仁桂, 贾小林, 肖国锐. 三频非组合模型的GPS/BDS/Galileo精密定轨[J]. 测绘学报, 2021, 50(2): 169-180. |
| [9] | 章浙涛, 李博峰, 何秀凤. 北斗三号多频相位模糊度无几何单历元固定方法[J]. 测绘学报, 2020, 49(9): 1139-1148. |
| [10] | 杜祯强, 柴洪洲, 向民志, 尹潇, 刘春鹤. 3种PPP模型的统一模糊度固定方法[J]. 测绘学报, 2020, 49(7): 824-832. |
| [11] | 王虎, 党亚民, 侯阳飞, 秘金钟, 王解先, 白贵霞, 成英燕, 张守建. PPP网解UPD模糊度固定的无基站差分大型CORS站整网快速精密解算[J]. 测绘学报, 2020, 49(3): 278-291. |
| [12] | 曾添, 隋立芬, 阮仁桂, 贾小林, 冯来平. 卫星精密定轨的三频观测量IF组合法[J]. 测绘学报, 2020, 49(10): 1275-1284. |
| [13] | 耿江辉, 常华, 郭将, 栗广才, 魏娜. 面向城市复杂环境的3种多频多系统GNSS单点高精度定位方法及性能分析[J]. 测绘学报, 2020, 49(1): 1-13. |
| [14] | 吕大千, 曾芳玲, 欧阳晓凤, 于合理. 时频传递的改进整数相位钟方法[J]. 测绘学报, 2019, 48(7): 889-897. |
| [15] | 阮仁桂, 魏子卿, 冯来平. 卫星钟差解算及其星间单差模糊度固定[J]. 测绘学报, 2018, 47(7): 916-923. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||