


测绘学报 ›› 2026, Vol. 55 ›› Issue (3): 515-524.doi: 10.11947/j.AGCS.2026.20250356
卞加超1( ), 薛树强1(), 赵爽2, 朱冀星1, 高金来1, 李保金2
), 薛树强1(), 赵爽2, 朱冀星1, 高金来1, 李保金2
收稿日期:2025-09-01
修回日期:2026-03-05
出版日期:2026-04-16
发布日期:2026-04-16
通讯作者:
薛树强
E-mail:bjc0539@163.com;xuesq@casm.ac.cn
作者简介:卞加超(2000—),男,硕士,研究方向为海洋声学导航。E-mail:bjc0539@163.com
基金资助:
Jiachao BIAN1(), Shuqiang XUE1(), Shuang ZHAO2, Jixing ZHU1, Jinlai GAO1, Baojin LI2
Received:2025-09-01
Revised:2026-03-05
Online:2026-04-16
Published:2026-04-16
Contact:
Shuqiang XUE
E-mail:bjc0539@163.com;xuesq@casm.ac.cn
About author:BIAN Jiachao (2000—), male, master, major in ocean acoustic navigation. E-mail: bjc0539@163.com
Supported by:摘要:
海洋声学导航通常采用主动式声呐获取载体与导航信标之间的往返信号传播时间,无法同时获取多信标声学观测,仅靠单历元声学观测难以实施声学观测质量控制。针对这一问题,本文提出了开窗抗差最小二乘估计算法,通过实施多窗口联合抗差策略,在窗口滑动过程中利用历史窗口内的观测质量信息动态构建抗差等价权,即新窗口内观测初始权采用其在多历史窗口内抗差等价权的均值,并利用载体轨迹模型预报信息对窗口内新增观测值的质量进行评估。试验结果表明:①在Huber、IGG Ⅱ与IGG Ⅲ抗差策略下,本文算法可有效抵御粗差影响,尤其是显著提升了窗口边缘杠杆观测的抗差效能;②本文算法可显著提升导航定位结果的精度和可靠性,抗差导航轨迹估计更为平滑、稳定。
中图分类号:
卞加超, 薛树强, 赵爽, 朱冀星, 高金来, 李保金. 海洋声学导航开窗抗差最小二乘估计[J]. 测绘学报, 2026, 55(3): 515-524.
Jiachao BIAN, Shuqiang XUE, Shuang ZHAO, Jixing ZHU, Jinlai GAO, Baojin LI. Multi-window joint robust estimation for marine acoustic navigation[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 515-524.
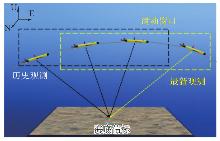
图1
载体轨迹估计的滑动窗口模式"
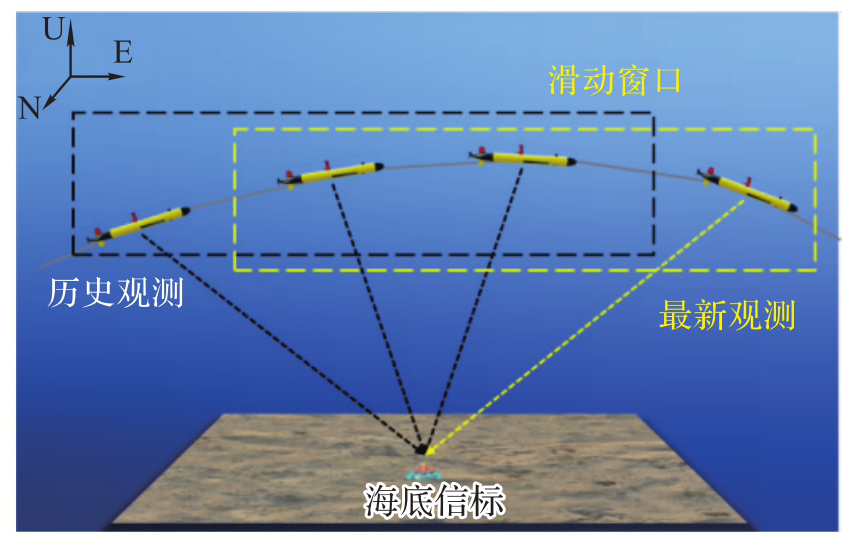

图2
抗差等价权更新流程"

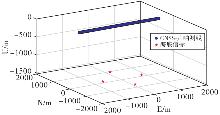
图3
海底信标与测线空间分布"
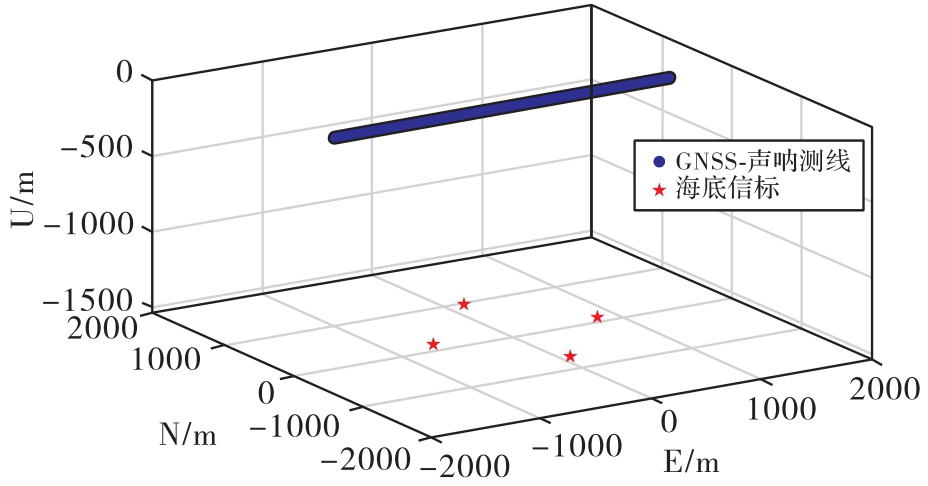
图4
声学导航定位轨迹与GNSS轨迹平面对比"
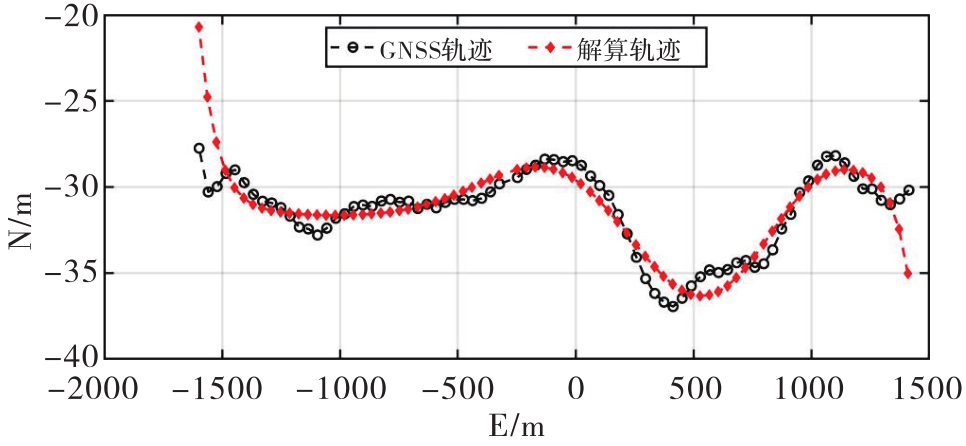
图5
观测残差与定位误差"
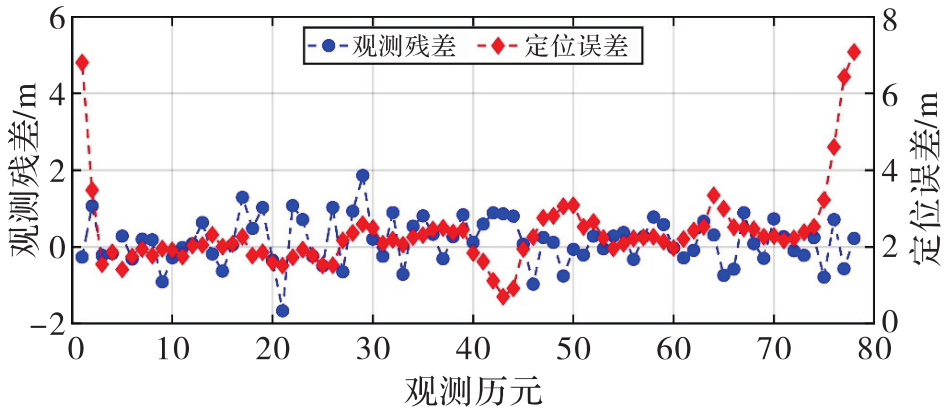
图6
多余观测分量分布"
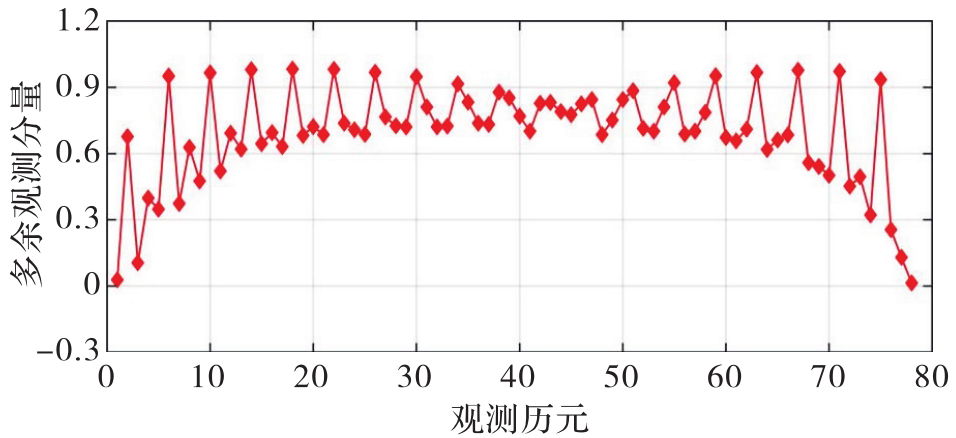
图7
标准化观测残差序列"
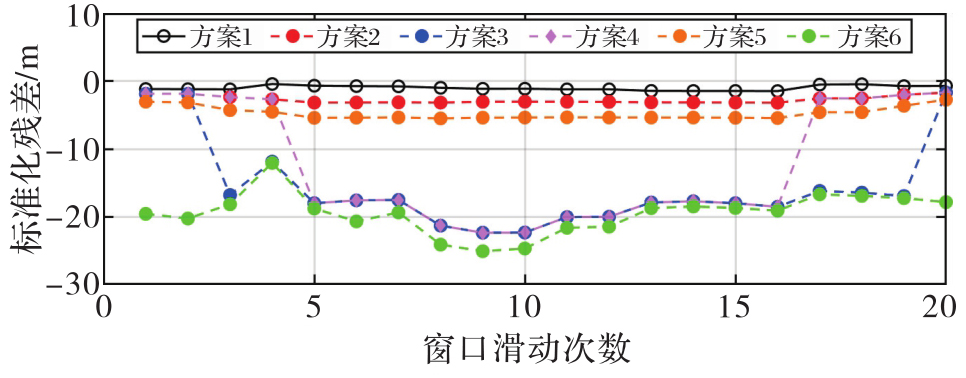
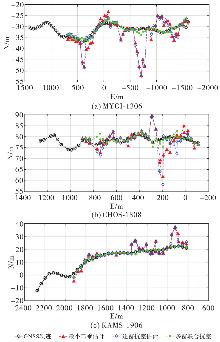
图8
逐窗抗差与多窗联合抗差导航结果对比"
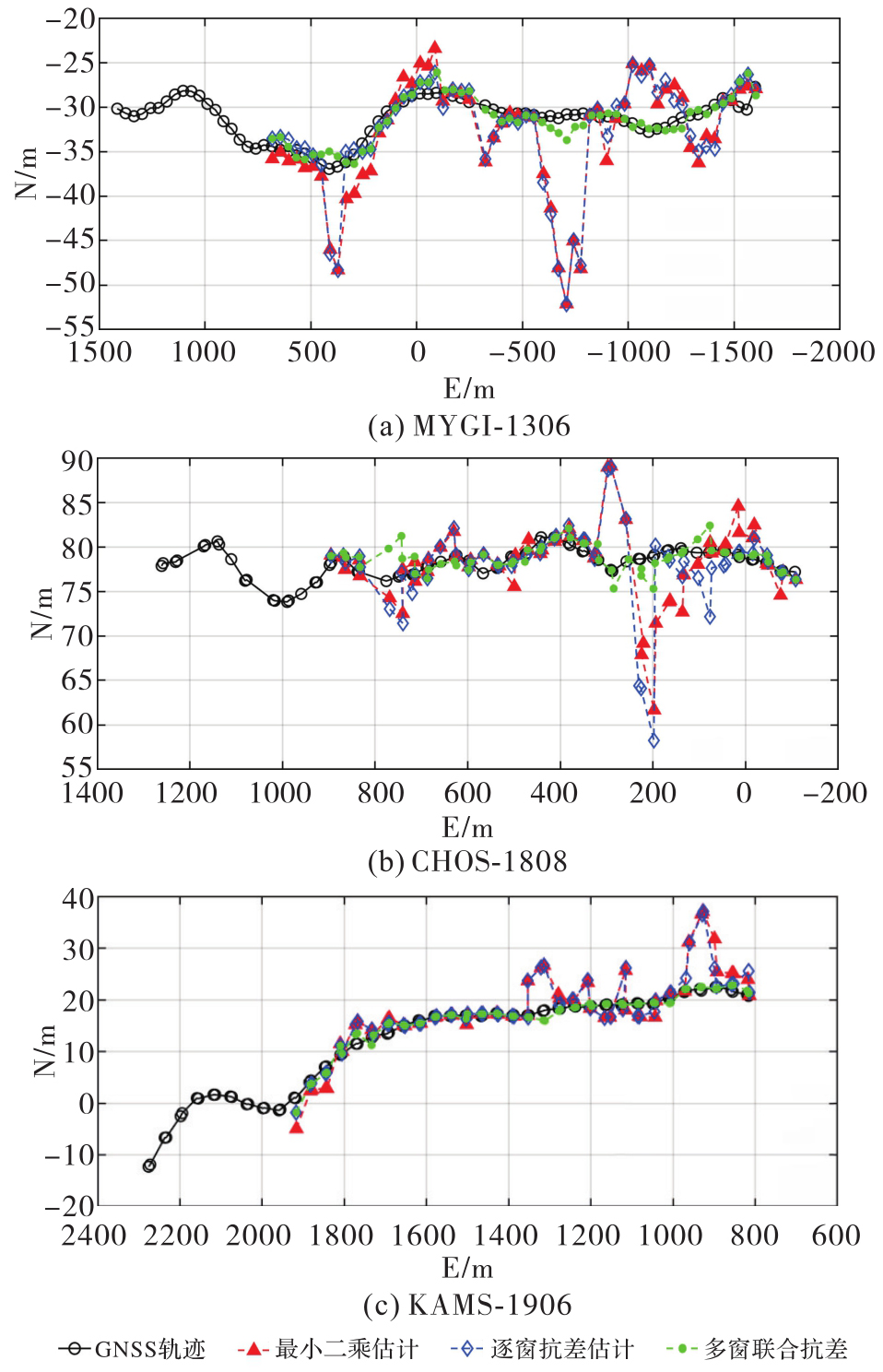

图9
导航定位绝对误差"
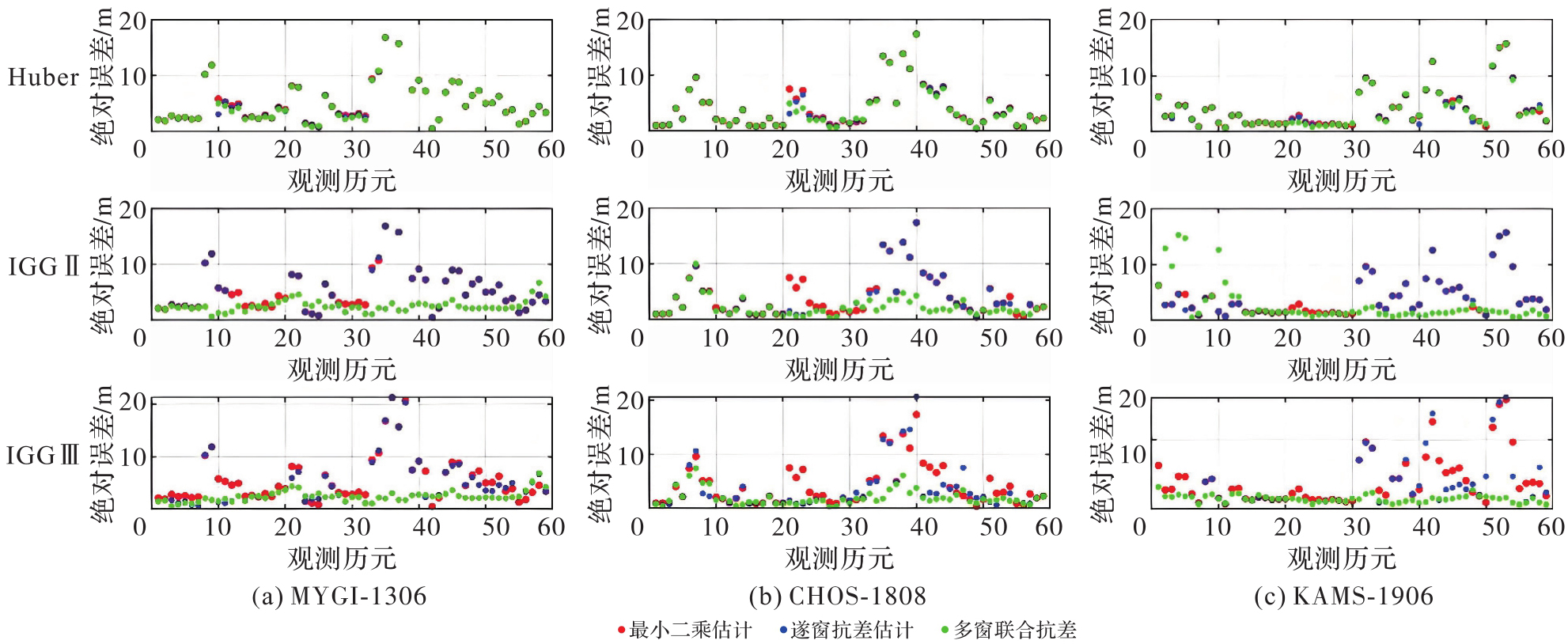
表1
不同抗差估计的导航定位绝对误差统计"
| 数据集 | 解算方案 | 抗差方案 | E绝对误差 | N绝对误差 | 定位绝对误差 | |||
|---|---|---|---|---|---|---|---|---|
| 均值 | 标准差 | 均值 | 标准差 | 均值 | 标准差 | |||
| MYGI-1306 | 逐窗抗差估计 | Huber | 3.16 | 2.23 | 3.77 | 4.61 | 5.45 | 4.54 |
| IG Ⅱ | 3.08 | 2.26 | 3.65 | 4.68 | 5.31 | 4.64 | ||
| IG Ⅲ | 2.72 | 2.19 | 3.48 | 4.69 | 4.96 | 4.56 | ||
| 多窗联合抗差 | Huber | 3.14 | 2.25 | 3.76 | 4.60 | 5.41 | 4.29 | |
| IG Ⅱ | 2.41 | 3.10 | 1.93 | 3.37 | 3.25 | 4.47 | ||
| IG Ⅲ | 2.08 | 1.07 | 0.87 | 0.77 | 2.38 | 1.07 | ||
| CHOS-1808 | 逐窗抗差估计 | Huber | 2.48 | 2.17 | 2.56 | 3.51 | 3.98 | 3.72 |
| IG Ⅱ | 2.24 | 2.09 | 2.51 | 3.52 | 3.72 | 3.77 | ||
| IG Ⅲ | 1.88 | 1.70 | 2.40 | 4.05 | 3.46 | 4.07 | ||
| 多窗联合抗差 | Huber | 2.42 | 2.09 | 2.51 | 3.49 | 3.89 | 3.69 | |
| IG Ⅱ | 1.79 | 1.58 | 0.99 | 0.97 | 2.18 | 1.70 | ||
| IG Ⅲ | 1.64 | 1.32 | 0.91 | 0.96 | 1.99 | 1.49 | ||
| KAMS-1906 | 逐窗抗差估计 | Huber | 2.34 | 2.01 | 2.72 | 3.37 | 4.02 | 3.48 |
| IG Ⅱ | 2.30 | 2.04 | 2.66 | 3.38 | 3.94 | 3.52 | ||
| IG Ⅲ | 2.23 | 2.21 | 2.27 | 3.29 | 3.51 | 3.68 | ||
| 多窗联合抗差 | Huber | 2.33 | 2.02 | 2.50 | 3.44 | 3.86 | 3.56 | |
| IG Ⅱ | 1.47 | 0.92 | 2.11 | 2.90 | 2.86 | 2.77 | ||
| IG Ⅲ | 1.19 | 0.45 | 0.66 | 0.64 | 1.44 | 0.51 | ||
表2
不同窗口大小情形下导航定位绝对误差统计"
| 数据集 | 窗口大小 | 解算方案 | E绝对误差 | N绝对误差 | 定位绝对误差 | |||
|---|---|---|---|---|---|---|---|---|
| 均值 | 标准差 | 均值 | 标准差 | 均值 | 标准差 | |||
| MYGI-1306 | 16历元 | 最小二乘估计 | 3.28 | 2.56 | 4.01 | 5.05 | 5.66 | 5.17 |
| 逐窗抗差估计 | 2.92 | 2.60 | 3.55 | 5.15 | 5.11 | 5.31 | ||
| 多窗联合抗差 | 2.22 | 0.91 | 0.76 | 0.82 | 2.47 | 0.95 | ||
| 20历元 | 最小二乘估计 | 3.21 | 2.25 | 3.84 | 4.58 | 5.54 | 4.51 | |
| 逐窗抗差估计 | 2.72 | 2.19 | 3.48 | 4.69 | 4.96 | 4.56 | ||
| 多窗联合抗差 | 2.08 | 1.07 | 0.87 | 0.77 | 2.38 | 1.07 | ||
| 24历元 | 最小二乘估计 | 3.14 | 1.90 | 4.06 | 4.21 | 5.61 | 4.01 | |
| 逐窗抗差估计 | 2.77 | 1.86 | 3.52 | 4.33 | 4.93 | 4.25 | ||
| 多窗联合抗差 | 2.14 | 1.17 | 1.01 | 0.96 | 2.57 | 1.15 | ||
| [1] |
杨元喜, 徐天河, 薛树强. 我国海洋大地测量基准与海洋导航技术研究进展与展望[J]. 测绘学报, 2017(1): 1-8. DOI: .
doi: 10.11947/j.AGCS.2017.20160519 |
|
YANG Yuanxi, XU Tianhe, XUE Shuqiang. Progresses and prospects in developing marine geodetic datum and marine navigation of China[J]. Acta Geodaetica et Cartographica Sinica, 2017(1): 1-8. DOI: .
doi: 10.11947/j.AGCS.2017.20160519 |
|
| [2] |
杨元喜. 弹性PNT基本框架[J]. 测绘学报, 2018, 47(7): 893-898. DOI: .
doi: 10.11947/j.AGCS.2018.20180149 |
|
YANG Yuanxi. Resilient PNT concept frame[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(7): 893-898. DOI: .
doi: 10.11947/j.AGCS.2018.20180149 |
|
| [3] | 阳凡林, 辛明真, 刘经南, 等. 超短基线多信标约束的深海动态定位方法探讨[J]. 武汉大学学报(信息科学版), 2023, 48(11): 1876-1883. |
| YANG Fanlin, XIN Mingzhen, LIU Jingnan, et al. Discussion of deep-sea dynamic positioning methods with ultra-short baseline multi-beacon constraint[J]. Geomatics and Information Science of Wuhan University, 2023, 48(11): 1876-1883. | |
| [4] | 薛树强, 杨诚, 赵爽, 等. 海底大地控制网无人观测系统研究进展[J]. 导航定位学报, 2023, 11(6): 8-21. |
| XUE Shuqiang, YANG Cheng, ZHAO Shuang, et al. Review of unmanned observation systems for seafloor geodetic network[J]. Journal of Navigation and Positioning, 2023, 11(6): 8-21. | |
| [5] |
赵爽, 王振杰, 刘慧敏. 顾及声线入射角的水下定位随机模型[J]. 测绘学报, 2018, 47(9): 1280-1289. DOI: .
doi: 10.11947/j.AGCS.2018.20170026 |
|
ZHAO Shuang, WANG Zhenjie, LIU Huimin. Investigation on underwater positioning stochastic model based on sound ray incidence angle[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(9): 1280-1289. DOI: .
doi: 10.11947/j.AGCS.2018.20170026 |
|
| [6] | 刘焱雄, 李梦昊, 刘杨, 等. 海底大地基准建设技术及其研究进展[J]. 海洋科学进展, 2022, 40(4): 684-700. |
| LIU Yanxiong, LI Menghao, LIU Yang, et al. Research progress of seafloor geodetic datum construction technology[J]. Advances in Marine Science, 2022, 40(4): 684-700. | |
| [7] | 薛树强, 杨元喜, 肖圳, 等. 全球导航卫星系统-声呐组合观测模型分类体系[J]. 哈尔滨工程大学学报, 2023, 44(11): 1857-1868. |
| XUE Shuqiang, YANG Yuanxi, XIAO Zhen, et al. Global navigation satellite system-acoustic combined observation model classification system[J]. Journal of Harbin Engineering University, 2023, 44(11): 1857-1868. | |
| [8] | YOKOTA Y, KANEDA M, HASHIMOTO T, et al. Experimental verification of seafloor crustal deformation observations by UAV-based GNSS-A[J]. Scientific Reports, 2023, 13(1): 4105. |
| [9] | 杨元喜. 条件平差、混合平差模型的抗差最小二乘解[J]. 测绘通报, 1995(1): 44-46. |
| YANG Yuanxi. Robust least squares solution of conditional adjustment and mixed adjustment models[J]. Bulletin of Surveying and Mapping, 1995(1): 44-46. | |
| [10] | 杨元喜, 徐天河. 基于移动开窗法协方差估计和方差分量估计的自适应滤波[J]. 武汉大学学报(信息科学版), 2003, 28(6): 714-718. |
| YANG Yuanxi, XU Tianhe. An adaptive Kalman filter combining variance component estimation with covariance matrix estimation based on moving window[J]. Geomatics and Information Science of Wuhan University, 2003, 28(6): 714-718. | |
| [11] | YANG Yuanxi, ZHANG Xiaodong, XU Junyi. Adaptively constrained Kalman filtering for navigation applications[J]. Survey Review, 2011, 43(322): 370-381. |
| [12] | 周江文. 再论拟合推估[J]. 测绘学报, 2001, 30(4): 283-285. |
| ZHOU Jiangwen. Further on collocation[J]. Acta Geodaetica et Cartographica Sinica, 2001, 30(4): 283-285. | |
| [13] | 杨元喜. 自适应抗差最小二乘估计[J]. 测绘学报, 1996, 25(3): 206-211. |
| YANG Yuanxi. Adaptively robust least squares estimation[J]. Acta Geodaetica et Cartographica Sinica, 1996, 25(3): 206-211. | |
| [14] | 杨元喜, 宋力杰, 徐天河. 大地测量相关观测抗差估计理论[J]. 测绘学报, 2002, 31(2): 95-99. |
| YANG Yuanxi, SONG Lijie, XU Tianhe. Robust parameter estimation for geodetic correlated observations[J]. Acta Geodaetica et Cartographica Sinica, 2002, 31(2): 95-99. | |
| [15] | 欧吉坤. 一种三步抗差方案的设计[J]. 测绘学报, 1996, 25(3): 173-179. |
| OU Jikun. Design of a new scheme of robust estimation by three steps[J]. Acta Geodaetica et Cartographica Sinica, 1996, 25(3): 173-179. | |
| [16] | 黄声享, 王金岭. 多余观测分量与可靠性度量指标研究[J]. 武汉测绘科技大学学报, 1997, 22(2): 114-118. |
| HUANG Shengxiang, WANG Jinling. Research on redundant observation components and reliability measures for correlated observations[J]. Journal of Wuhan Tehcnnical University of Surveying and Mapping, 1997, 22(2): 114-118. | |
| [17] |
闫凤池, 王振杰, 赵爽, 等. 顾及双程声径的常梯度声线跟踪水下定位算法[J]. 测绘学报, 2022, 51(1): 31-40. DOI: .
doi: 10.11947/j.AGCS.2022.20210234 |
|
YAN Fengchi, WANG Zhenjie, ZHAO Shuang, et al. A layered constant gradient acoustic ray tracing underwater positioning algorithm considering round-trip acoustic path[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(1): 31-40. DOI: .
doi: 10.11947/j.AGCS.2022.20210234 |
|
| [18] | 杨元喜, 刘焱雄, 孙大军, 等. 海底大地基准网建设及其关键技术[J]. 中国科学:地球科学, 2020, 50(7): 936-945. |
| YANG Yuanxi, LIU Yanxiong, SUN Dajun, et al. Seafloor geodetic network establishment and key technologies[J]. Scientia Sinica (Terrae), 2020, 50(7): 936-945. | |
| [19] | XUE Shuqiang, YANG Yuanxi, YANG Wenlong, et al. GNSS-a network solution with zenith acoustic delay estimation[J]. Marine Geodesy, 2024, 47(3): 237-268. |
| [20] | LARSEN M B. Synthetic long baseline navigation of underwater vehicles[C]//Proceedings of OCEANS 2000 MTS/IEEE Conference and Exhibition. New York: IEEE, 2002: 2043-2050. |
| [21] | 宋丽君, 赵万良, 成宇翔, 等. 基于滑动窗因子图优化的多源导航信息融合[J]. 飞控与探测, 2024, 7(5): 20-29. |
| SONG Lijun, ZHAO Wanliang, CHENG Yuxiang, et al. Multi-source navigation information fusion based on sliding window factor graph optimization[J]. Flight Control & Detection, 2024, 7(5): 20-29. | |
| [22] | 徐天河, 王森, 代培培. UWB/INS紧组合变分贝叶斯自适应滤波算法[J]. 导航定位学报, 2025, 13(2): 1-8. |
| XU Tianhe, WANG Sen, DAI Peipei. UWB/INS tightly coupled integration algorithm based on variational Bayesian adaptive Kalman filter[J]. Journal of Navigation and Positioning, 2025, 13(2): 1-8. | |
| [23] |
黄紫如, 柴洪洲, 向民志, 等. 基于抗差因子图的AUV多源信息融合定位方法[J]. 测绘学报, 2023, 52(8): 1278-1285. DOI: .
doi: 10.11947/j.AGCS.2023.20210735 |
|
HUANG Ziru, CHAI Hongzhou, XIANG Minzhi, et al. AUV multi-source information fusion localization method based on robust factor graph[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(8): 1278-1285. DOI: .
doi: 10.11947/j.AGCS.2023.20210735 |
|
| [24] | 段楚峰, 张昊楠, 匡翠林, 等. 应用曲线积分的地震勘探多缆定位算法[J]. 石油地球物理勘探, 2022, 57(6): 1317-1324. |
| DUAN Chufeng, ZHANG Haonan, KUANG Cuilin, et al. Multi-streamer positioning algorithm based on curvilinear integral for seismic exploration[J]. Oil Geophysical Prospecting, 2022, 57(6): 1317-1324. | |
| [25] | 薛树强, 杨诚, 卞加超, 等. 无外部信息辅助的主动式声呐时间开窗导航定位模型[J]. 武汉大学学报(信息科学版), 2026, 51(2): 296-305. |
| XUE Shuqiang, YANG Cheng, BIAN Jiachao, et al. Active sonar time-window navigation and positioning model without appending external navigation information[J]. Geomatics and Information Science of Wuhan University, 2026, 51(2): 296-305. | |
| [26] |
闫志闯, 徐新强, 赵德军, 等. 低轨卫星约化动力法定轨参数变换的高效算法[J]. 测绘学报, 2018, 47(S0): 28-37. DOI: .
doi: 10.11947/j.AGCS.2018.20180307 |
|
YAN Zhichuang, XU Xinqiang, ZHAO Dejun, et al. An efficient algorithm with reduced dynamic orbit determination for LEOs based on parameter transforming[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(S0): 28-37. DOI: .
doi: 10.11947/j.AGCS.2018.20180307 |
|
| [27] |
余文坤, 吴佩达, 张昊楠, 等. 基于多项式曲线拟合的海上地震勘探拖缆定位[J]. 测绘学报, 2022, 51(5): 772-780. DOI: .
doi: 10.11947/j.AGCS.2022.20200588 |
|
YU Wenkun, WU Peida, ZHANG Haonan, et al. Offshore towed-streamer seismic positioning based on polynomial curve fitting[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(5): 772-780. DOI: .
doi: 10.11947/j.AGCS.2022.20200588 |
|
| [28] | 宋力杰, 杨元喜. 均值漂移模型粗差探测法与LEGE法的比较[J]. 测绘学报, 1999, 28(4): 295-300. |
| SONG Lijie, YANG Yuanxi. Comparison between data snooping and LEGE[J]. Acta Geodaetica et Cartographica Sinica, 1999, 28(4): 295-300. | |
| [29] | 薛树强, 杨文龙, 赵爽. 主动式定位的椭球交会原理及其2种解法[J]. 导航定位学报, 2024, 12(3): 1-7. |
| XUE Shuqiang, YANG Wenlong, ZHAO Shuang. The ellipsoid intersection principle of active positioning and its two solutions[J]. Journal of Navigation and Positioning, 2024, 12(3): 1-7. | |
| [30] | WATANABE S I, ISHIKAWA T, YOKOTA Y, et al. GARPOS: analysis software for the GNSS-a seafloor positioning with simultaneous estimation of sound speed structure[J]. Frontiers in Earth Science, 2020, 8: 597532. |
| [31] | YANG Yuanxi, SONG Lijie, XU Tianhe. Robust estimator for correlated observations based on bifactor equivalent weights[J/OL]. Journal of Geodesy, 2002, 76(6): 353-358. |
| [32] | YANG Wenlong, XUE Shuqiang, LIU Yixu. P-order secant method for rapidly solving the ray inverse problem of underwater acoustic positioning[J]. Marine Geodesy, 2023, 46(1): 3-15. |
| [1] | 姚朝龙, 游泓锐, 何玄晖, 陆钧雅, 谢依倩, 李琼, 朱双, 罗志才. 综合利用GNSS PWV/垂向形变与GRACE/GRACE-FO数据反演综合干旱指数[J]. 测绘学报, 2025, 54(10): 1757-1768. |
| [2] | 李根, 柴洪洲, 靳凯迪, 展昭. 水下地形匹配定位抗差粒子滤波算法[J]. 测绘学报, 2025, 54(10): 1841-1851. |
| [3] | 王宁波, 李子申, 李昂, 张研, 刘昂, 汪亮. 基于滑窗初始点dSTEC定权的全球实时电离层综合[J]. 测绘学报, 2024, 53(2): 296-305. |
| [4] | 邝英才, 吕志平, 李林阳, 王方超, 许国昌. GNSS-A水下定位的动态非线性Gauss-Helmert模型及其抗差总体卡尔曼滤波算法[J]. 测绘学报, 2023, 52(4): 559-570. |
| [5] | 王泽明, 李浩军, 孙亚峰. GNSS-R潮位监测抗差估计[J]. 测绘学报, 2023, 52(2): 195-205. |
| [6] | 谢劭峰, 王义杰, 黄良珂, 彭华, 黎峻宇, 刘立龙. 中国区域大气加权平均温度垂直递减率格网模型[J]. 测绘学报, 2023, 52(2): 206-217. |
| [7] | 孙悦, 薛树强, 韩保民, 肖圳. 邻近海底基准站坐标时序联合处理模型[J]. 测绘学报, 2023, 52(11): 1835-1843. |
| [8] | 郝雨时, 孙剑伟, 隋心, 徐爱功, 施闯. 顾及ISB/IFB的多GNSS RTK/INS紧组合导航方法[J]. 测绘学报, 2022, 51(11): 2265-2272. |
| [9] | 杨高朝, 王庆, 蔚保国, 刘鹏飞, 李爽. 基于抗差LM的视觉惯性里程计与伪卫星混合高精度室内定位[J]. 测绘学报, 2022, 51(1): 18-30. |
| [10] | 谢俊峰, 刘仁. 全波形星载激光测距误差抑制的滑动窗口高斯拟合算法[J]. 测绘学报, 2021, 50(9): 1240-1250. |
| [11] | 黄良珂, 朱葛, 彭华, 陈华, 刘立龙, 姜卫平. 全球ZWD垂直剖面滑动窗口的格网模型[J]. 测绘学报, 2021, 50(5): 685-694. |
| [12] | 边少锋, 周威, 刘立龙, 李厚朴, 刘备. 小波变换与滑动窗口相结合的GNSS-IR雪深估测模型[J]. 测绘学报, 2020, 49(9): 1179-1188. |
| [13] | 郭迎钢, 李宗春, 何华, 王志颖. 三维坐标转换公共点最优权值的单纯形搜索算法[J]. 测绘学报, 2020, 49(8): 1004-1013. |
| [14] | 尹潇, 柴洪洲, 向民志, 杜祯强. 附加运动学约束的BDS抗差UKF导航算法[J]. 测绘学报, 2020, 49(11): 1399-1406. |
| [15] | 颜金彪, 吴波, 彭馨. 顾及Gestalt邻近与简化原则的平面点集形状重建[J]. 测绘学报, 2020, 49(11): 1485-1496. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||