

Acta Geodaetica et Cartographica Sinica ›› 2026, Vol. 55 ›› Issue (2): 287-300.doi: 10.11947/j.AGCS.2026.20250361
• Geodesy and Navigation • Previous Articles Next Articles
Lei LIANG1,2,3( ), Changqing WANG4,5(), Lingyong HUANG3, Zhiyong HUANG3, Yaoyao YU6, Min ZHONG7, Yihao YAN8, Qinglu MU9
), Changqing WANG4,5(), Lingyong HUANG3, Zhiyong HUANG3, Yaoyao YU6, Min ZHONG7, Yihao YAN8, Qinglu MU9
Received:2025-09-04
Revised:2025-11-10
Online:2026-03-13
Published:2026-03-13
Contact:
Changqing WANG
E-mail:lianglei@chzu.edu.cn;whiggsdkd@asch.whigg.ac.cn
About author:LIANG Lei (1990—), male, PhD, associate professor, majors in physical geodesy and satellite gravity. E-mail: lianglei@chzu.edu.cn
Supported by:CLC Number:
Lei LIANG, Changqing WANG, Lingyong HUANG, Zhiyong HUANG, Yaoyao YU, Min ZHONG, Yihao YAN, Qinglu MU. GRACE-FO attitude data determination with consideration of star camera alignment matrix calibration[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(2): 287-300.
Fig. 1
Time series and power spectrum of inter-satellite pointing by the star cameras alignment corrected"
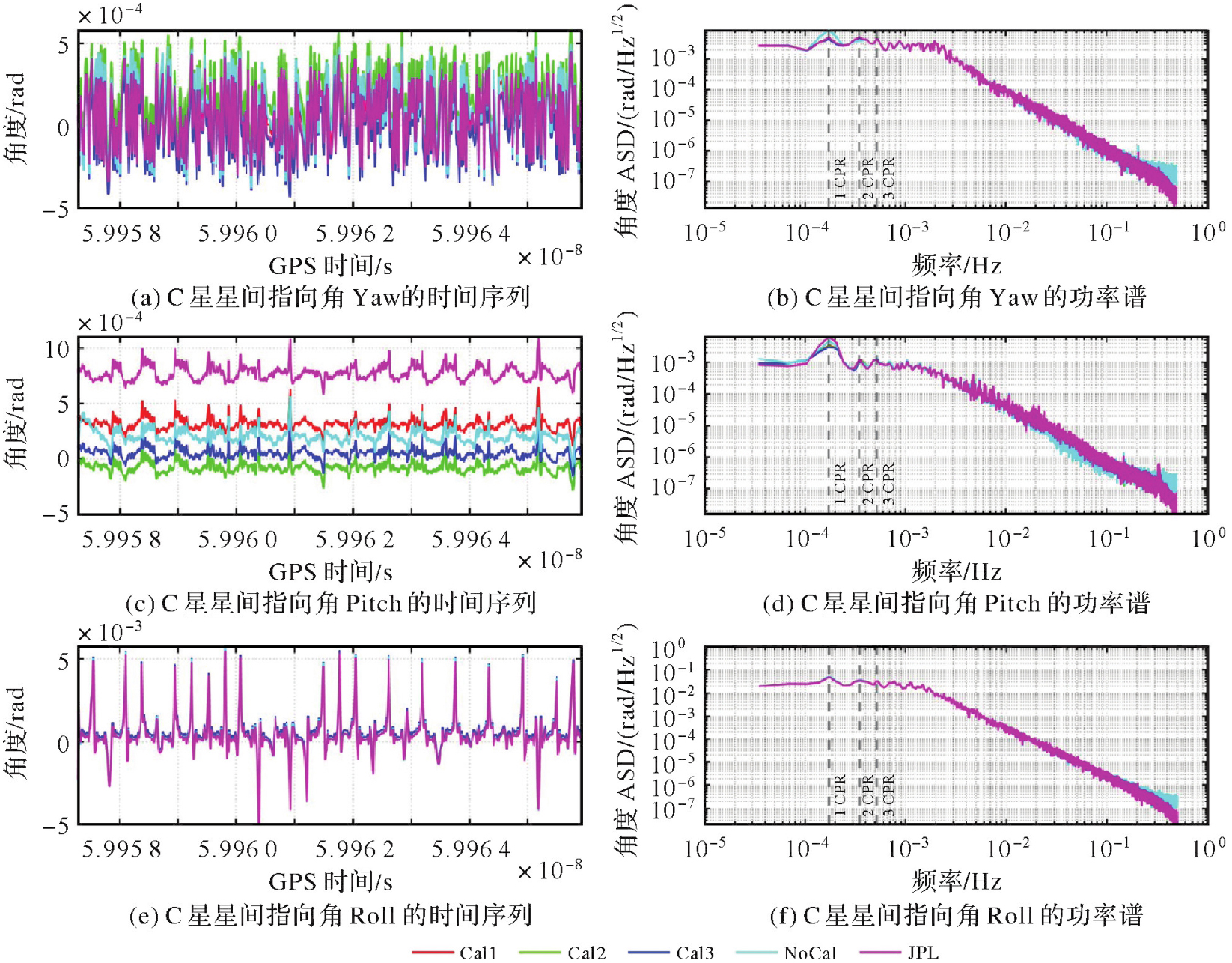
Fig. 2
Time series and power spectrum of difference between the star cameras alignment corrected results and JPL results"
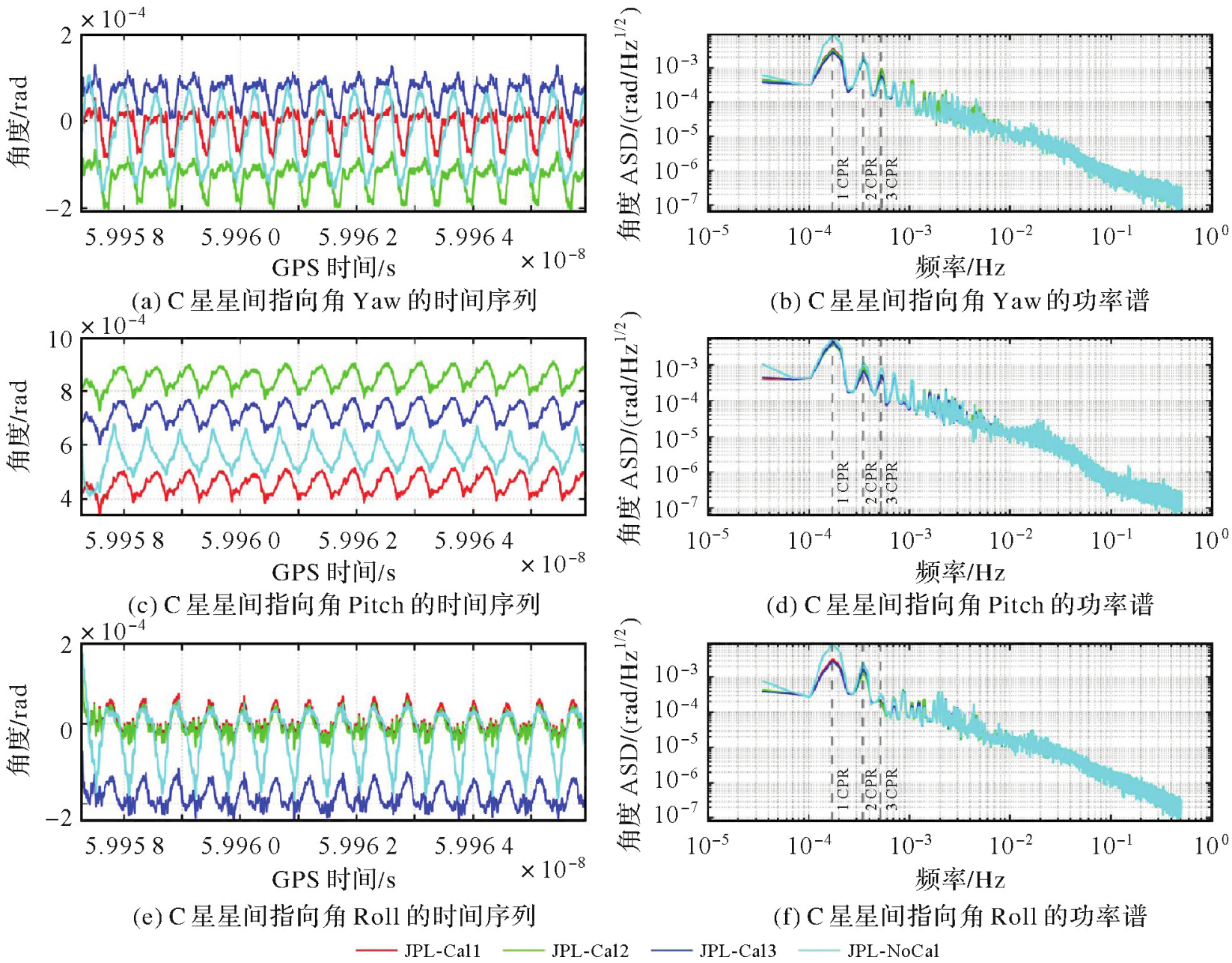
Tab. 1
Standard deviation of the inter-satellite pointing in Fig. 2"
| 星间指向角 | JPL-Cal1 | JPL-Cal2 | JPL-Cal3 | JPL-NoCal |
|---|---|---|---|---|
| Yaw | 3.33×10-5 | 3.11×10-5 | 2.82×10-5 | 7.25×10-5 |
| Pitch | 3.38×10-5 | 3.43×10-5 | 3.67×10-5 | 5.02×10-5 |
| Roll | 2.82×10-5 | 2.57×10-5 | 2.65×10-5 | 6.68×10-5 |

Fig. 3
Time series and power spectrum of the relative total error between the fused quaternion and star camera 1"
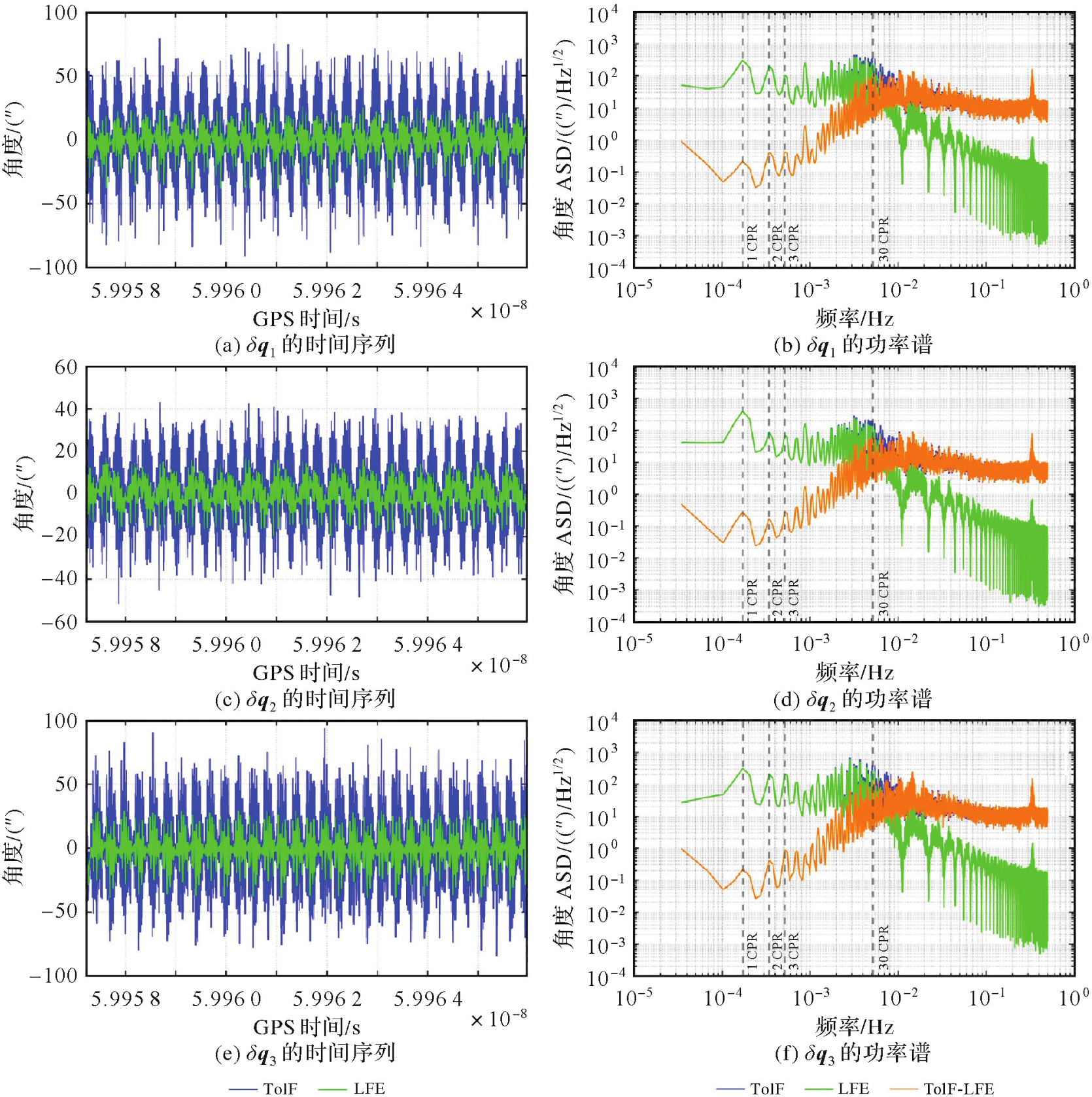
Fig. 4
Time series and power spectrum differences between the fused star cameras results before and after low-frequency error processing"
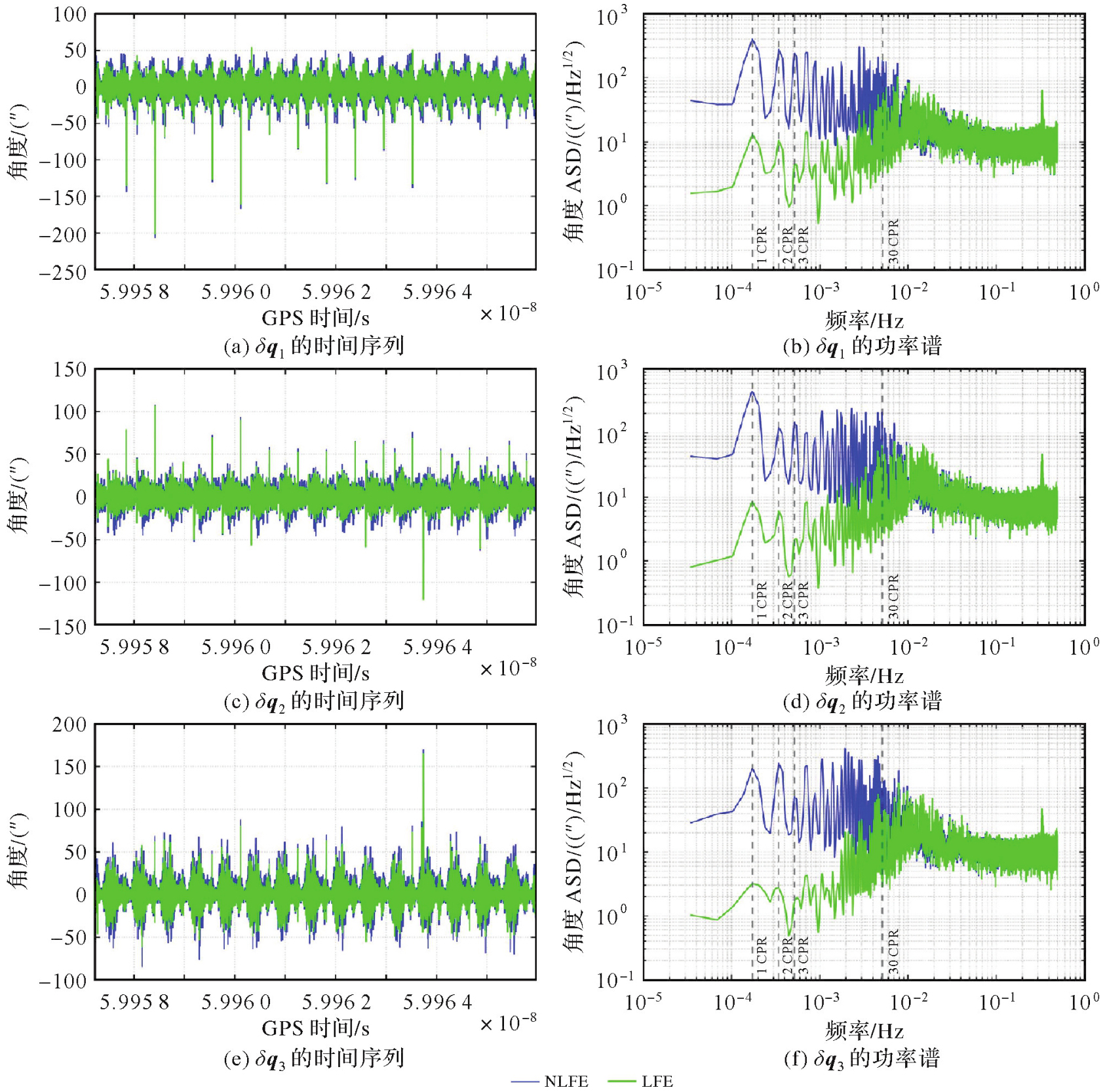

Fig. 5
Inter-satellite pointing angles of GRACE-FO satellite C"


Fig. 6
Satellite angular velocity vector"

Tab. 2
Standard deviation of the angular velocity vector"
| 结果差异 | ωx | ωy | ωz |
|---|---|---|---|
| CHZU_LFE-IMU1B | 1.58×10-7 | 1.30×10-7 | 1.37×10-7 |
| CHZU_NLFE-IMU1B | 1.84×10-7 | 1.49×10-7 | 1.60×10-7 |
| JPL-IMU1B | 6.00×10-7 | 3.55×10-7 | 3.93×10-7 |
Fig. 7
The degree variance of the time-variable gravity field model"
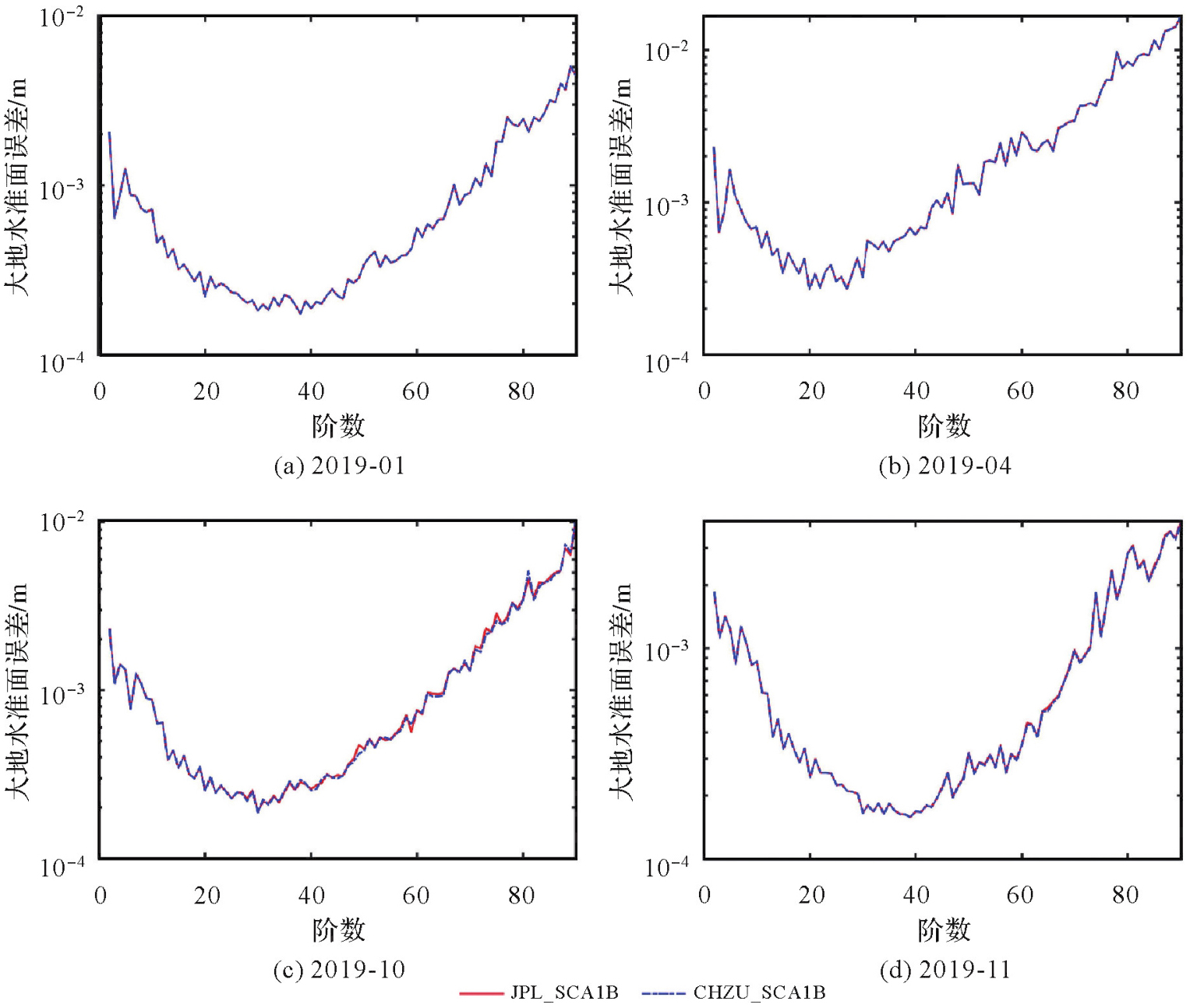
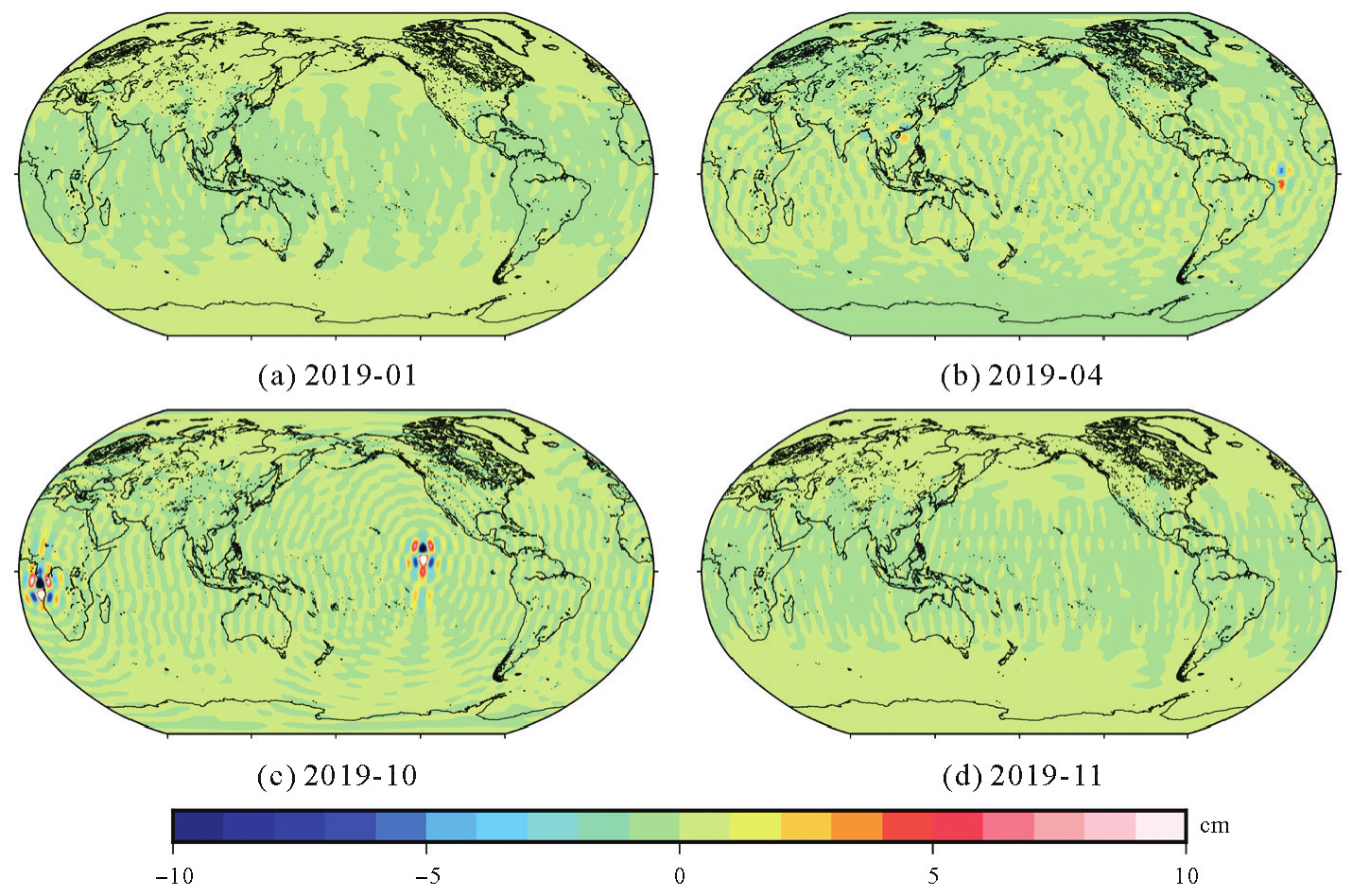
Fig. 8
The difference in equivalent water height for mass change"
| [1] | TAPLEY B D, BETTADPUR S, RIES J C, et al. GRACE measurements of mass variability in the Earth system[J]. Science, 2004, 305(5683): 503-505. |
| [2] | KORNFELD R P, ARNOLD B W, GROSS M A, et al. GRACE-FO: the gravity recovery and climate experiment follow-on mission[J]. Journal of Spacecraft and Rockets, 2019, 56(3): 931-951. |
| [3] | LANDERER F W, FLECHTNER F M, SAVE H, et al. Extending the global mass change data record: GRACE follow-on instrument and science data performance[J]. Geophysical Research Letters, 2020, 47(12): e2020GL088306. |
| [4] | 肖云, 杨元喜, 潘宗鹏, 等. 中国卫星跟踪卫星重力测量系统性能与应用[J]. 科学通报, 2023, 68(20): 2655-2664. |
| XIAO Yun, YANG Yuanxi, PAN Zongpeng, et al. Performance and application of the Chinese satellite-to-satellite tracking gravimetry system[J]. Chinese Science Bulletin, 2023, 68(20): 2655-2664. | |
| [5] | XIAO Yun, YANG Yuanxi, PAN Zongpeng, et al. Chinese gravimetry augment and mass change exploring mission status and future[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 67-75. |
| [6] |
李建成, 吴云龙, 姚宜斌, 等. 面向“数据-场景-模式”驱动的卫星重力技术研究进展、挑战与趋势[J]. 测绘学报, 2025, 54(9): 1537-1560. DOI: .
doi: 10.11947/j.AGCS.2025.20250274 |
|
LI Jiancheng, WU Yunlong, YAO Yibin, et al. Satellite gravity technology oriented towards data-scenario-model driven approach: developments, challenges and outlook[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(9): 1537-1560. DOI: .
doi: 10.11947/j.AGCS.2025.20250274 |
|
| [7] | 梁磊, 闫易浩, 王长青, 等. 基于卡尔曼滤波重构GRACE-FO姿态数据[J]. 地球物理学报, 2022, 65(12): 4602-4615. |
| LIANG Lei, YAN Yihao, WANG Changqing, et al. Results from GRACE-FO attitude determination based on Kalman filter[J]. Chinese Journal of Geophysics, 2022, 65(12): 4602-4615. | |
| [8] | GOSWAMI S, KLINGER B, WEIGELT M, et al. Analysis of attitude errors in GRACE range-rate residuals: a comparison between SCA1B and the fused attitude product (SCA1B+ACC1B)[J]. IEEE Sensors Letters, 2018, 2(2): 1-4. |
| [9] | PATEL R C. Analyzing and monitoring GRACE-FO star camera performance in changing environment[D]. Austin: The University of Texas at Austin, 2020. |
| [10] | BANDIKOVA T, FLURY J. Improvement of the GRACE star camera data based on the revision of the combination method[J]. Advances in Space Research, 2014, 54(9): 1818-1827. |
| [11] | BANDIKOVA T. The role of attitude determination for inter-satellite ranging[D]. Hannover: Leibniz Universität Hannover, 2015. |
| [12] | WEN H Y, KRUIZINGA G, PAIK M, et al. Gravity recovery and climate experiment follow-on (GRACE-FO) level-1 data product user handbook[R]. Pasadena: Jet Propulsion Laboratory, 2019. |
| [13] | 庞博, 黎康, 汤亮, 等. 星敏感器误差分析与补偿方法[J]. 空间控制技术与应用, 2017, 43(1): 17-24. |
| PANG Bo, LI Kang, TANG Liang, et al. Error analysis and compensation for star sensor[J]. Aerospace Control and Application, 2017, 43(1): 17-24. | |
| [14] |
胡丹怡, 吴云龙, 肖云, 等. 顾及温度效应改正的多星敏感器角速度重建方法[J]. 测绘学报, 2024, 53(9): 1748-1760. DOI: .
doi: 10.11947/j.AGCS.2024.20240093 |
|
HU Danyi, WU Yunlong, XIAO Yun, et al. Multi-star tracker angular velocity reconstruction method considering temperature effect correction[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(9): 1748-1760. DOI: .
doi: 10.11947/j.AGCS.2024.20240093 |
|
| [15] | 叶立军, 刘付成, 尹海宁, 等. 基于纵向滤波的星敏感器低频误差在线估计[J]. 航空学报, 2019, 40(10): 238-248. |
| YE Lijun, LIU Fucheng, YIN Haining, et al. Online estimation of low frequency error for star tracker based on vertical filter[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(10): 238-248. | |
| [16] | WANG Jiongqi, XIONG Kai, ZHOU Haiyin. Low-frequency periodic error identification and compensation for star tracker attitude measurement[J]. Chinese Journal of Aeronautics, 2012, 25(4): 615-621. |
| [17] | 熊凯, 汤亮, 刘一武. 基于地标信息的星敏感器低频误差标定方法[J]. 空间控制技术与应用, 2012, 38(3): 11-15. |
| XIONG Kai, TANG Liang, LIU Yiwu. Calibration of star sensor's low frequency error based on landmark information[J]. Aerospace Control and Application, 2012, 38(3): 11-15. | |
| [18] | 霍德聪, 黄琳, 李岩, 等. 星敏感器在轨测量误差分析[J]. 遥感学报, 2012, 16(S1): 57-60. |
| HUO Decong, HUANG Lin, LI Yan, et al. An analytical method of star tracker measurement errors[J]. National Remote Sensing Bulletin, 2012, 16(S1): 57-60. | |
| [19] | WANG F. Study on center of mass calibration and K-banding system calibration of the GRACE mission[D]. Austin: The University of Texas at Austin, 2003. |
| [20] | KO U D, WANG Furun, EANES R J. Improvement of Earth gravity field maps after pre-processing upgrade of the GRACE satellite's star trackers[J]. Korean Journal of Remote Sensing, 2015, 31(4): 353-360. |
| [21] | 黄志勇, 李姗姗, 李世忠, 等. GRACE-FO卫星星敏感器/加速度计安装矩阵校准[J]. 地球物理学进展, 2024, 39(1): 87-99. |
| HUANG Zhiyong, LI Shanshan, LI Shizhong, et al. SCA/ACC alignment algorithm for GRACE-FO[J]. Progress in Geophysics, 2024, 39(1): 87-99. | |
| [22] |
黄志勇. GRACE型重力卫星载荷在轨定标理论与方法研究[J]. 测绘学报, 2025, 54(3): 583. DOI: .
doi: 10.11947/j.AGCS.2025.20230499 |
|
HUANG Zhiyong. Research on theory and method of on-orbit calibration of GRACE-type gravity satellite payloads[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(3): 583. DOI: .
doi: 10.11947/j.AGCS.2025.20230499 |
|
| [23] | WANG Aoming, GU Defeng, HUANG Zhiyong, et al. GRACE-FO attitude determination: star camera installation matrix calibration and incremental quaternion integrator[J]. Acta Astronautica, 2024, 219: 774-784. |
| [24] | YANG Fan, LIANG Lei, WANG Changqing, et al. Attitude determination for GRACE-FO: reprocessing the level-1A SC and IMU data[J]. Remote Sensing, 2022, 14(1): 126. |
| [25] | HARVEY N, SAKUMURA C. Results from a GRACE/GRACE-FO attitude reconstruction Kalman filter[J]. Journal of Geodesy, 2019, 93(10): 1881-1896. |
| [26] | 熊凯, 宗红, 汤亮. 星敏感器低频误差在轨校准方法研究[J]. 空间控制技术与应用, 2014, 40(3): 8-13. |
| XIONG Kai, ZONG Hong, TANG Liang. On star sensor low frequency error in-orbit calibration method[J]. Aerospace Control and Application, 2014, 40(3): 8-13. | |
| [27] | 王炯琦, 矫媛媛, 周海银, 等. 复杂卫星抖动下的星敏感器姿态测量数据处理技术[J]. 电子与信息学报, 2010, 32(8): 1885-1891. |
| WANG Jiongqi, JIAO Yuanyuan, ZHOU Haiyin, et al. Star sensor attitude measuring data processing technique in condition of complex satellite dithering[J]. Journal of Electronics & Information Technology, 2010, 32(8): 1885-1891. | |
| [28] | ROMANS L. Optimal combination of quaternions from multiple star cameras[R]. Pasadena: Jet Propulsion Laboratory, 2003. |
| [29] | MANDEA M, HOLSCHNEIDER M, LESUR V, et al. The Earth's magnetic field at the CHAMP satellite epoch[M]//System Earth via geodetic-geophysical space techniques. Berlin: Springer, 2010: 475-526. |
| [30] | WU S C, KRUIZINGA G, BERTIGER W. Algorithm theoretical basis document for GRACE Level-1B data processing: version 1.2[R]. Pasadena: Jet Propulsion Laboratory, 2006. |
| [31] | SIEMES C. GOCE gradiometer calibration and Level 1b data processing[R]. Noordwijk: European Space Agency, 2011. |
| [32] | STUMMER C, FECHER T, PAIL R. Alternative method for angular rate determination within the GOCE gradiometer processing[J]. Journal of Geodesy, 2011, 85(9): 585-596. |
| [33] | 郭泽华, 吴云龙, 肖云, 等. 联合星象仪四元数的卫星重力梯度测量角速度重建方法[J]. 武汉大学学报(信息科学版), 2021, 46(9): 1336-1344. |
| GUO Zehua, WU Yunlong, XIAO Yun, et al. Reconstruction method of satellite gravity gradient measurement angular velocity by combining star tracker quaternion[J]. Geomatics and Information Science of Wuhan University, 2021, 46(9): 1336-1344. | |
| [34] | JAFARI M. Optimal redundant sensor configuration for accuracy increasing in space inertial navigation system[J]. Aerospace Science and Technology, 2015, 47: 467-472. |
| [35] | FROMMKNECHT B. Integrated sensor analysis of the GRACE mission[D]. München: Technische Universität München, 2007. |
| [36] | SFIKAS K. Reconstructing the attitude of the GRACE-FO mission based on fusion of star sensor, gyroscope and steering mirror data[D]. Delft: Delft University of Technology, 2024. |
| [37] | LEFFERTS E J, MARKLEY F L, SHUSTER M D. Kalman filtering for spacecraft attitude estimation[J]. Journal of Guidance, Control, and Dynamics, 1982, 5(5): 417-429. |
| [38] | MARKLEY F L. Attitude error representations for Kalman filtering[J]. Journal of Guidance, Control, and Dynamics, 2003, 26(2): 311-317. |
| [39] | TRAWNY N, ROUMELIOTIS S I. Indirect Kalman filter for 3D attitude estimation[R]. Minneapolis: University of Minnesota, 2005. |
| [40] | KLINGER B. A contribution to GRACE time-variable gravity field recovery: improved Level-1B data pre-processing methodologies[D]. Graz: Technischen Universität Graz, 2018. |
| [41] | KLINGER B, MAYER-GÜRR T. Combination of GRACE star camera and angular acceleration data: impact on monthly gravity field models[C]//Proceedings of 2014 RACE Science Team Meeting. Potsdam: [s.n.], 2014. |
| [42] | 王燕清, 杜伟峰, 吴永康, 等. 星敏感器在轨精度分析[J]. 光学学报, 2025, 45(12): 1228002. |
| WANG Yanqing, DU Weifeng, WU Yongkang, et al. Analysis of star sensor in-orbit accuracy[J]. Acta Optica Sinica, 2025, 45(12): 1228002. | |
| [43] | LIANG Lei, YU Jinhai, WANG Changqing, et al. Influence of the low-frequency error of the residual orbit on recovering time-variable gravity field from the satellite-to-satellite tracking mission[J]. Remote Sensing, 2021, 13(6): 1118. |
| [44] | 梁磊, 于锦海, 朱永超, 等. 顾及非线性改正的动力学方法反演GRACE时变重力场模型[J]. 地球物理学报, 2019, 62(9): 3259-3268. |
| LIANG Lei, YU Jinhai, ZHU Yongchao, et al. Recovered GRACE time-variable gravity field based on dynamic approach with the non-linear corrections[J]. Chinese Journal of Geophysics, 2019, 62(9): 3259-3268. |
| [1] | Xiaolei YANG, Yun XIAO, Liqing YANG, Xiaodong HONG, Enze GUO, Han WANG. Improved baseline method for time-variable gravity field recovery [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 708-720. |
| [2] | Wentao HOU, Yun XIAO, Jie CAO, Yukang WANG, Chunting CAO, Han WANG. A downscaling method for gravity satellite derived groundwater storage changes based on a feature-weighted CatBoost model [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 490-501. |
| [3] | Tangting WU, Xinyu LUO, Liguo LU, Zhanke LIU, Nengfang CHAO. Assessment of water resource changes and drought characteristics in the Shaanxi, Gansu and Ningxia region based on GNSS and GRACE/GRACE-FO [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 439-450. |
| [4] | Haichao WANG, Changqing WANG, Dinghao GUO, Zitong ZHU, Wei FENG, Min ZHONG. Detection of atmospheric density in the thermosphere and satellite orbital decay variations triggered by different intensities of geomagnetic storms using the GRACE-FO satellite [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(2): 248-261. |
| [5] | Xinghai YANG, Linguo YUAN, Zhongshan JIANG, Miao TANG. Joint inversion of GNSS and GRACE/GRACE-FO data for terrestrial water storage changes in Southwest China [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(5): 813-822. |
| [6] | ZHANG Yupeng, ZHANG Yonghong, WU Hongan, LIU Qinghao, WEI Jujie, KANG Yonghui. Study on elastic skeleton storage coefficient in Beijing-Tianjin-Hebei region combining satellite and ground data [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(4): 660-669. |
| [7] | LIU Tianjun, CHEN Qusen, JIANG Weiping, CHEN Hua, XIA Fengyu, FAN Caoming. Effect of satellite attitude quaternions on BeiDou precise point positioning during the eclipse season [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(4): 550-558. |
| [8] | SHAO Kai, YI Bin, ZHANG Houzhe, GU Defeng. Integer phase clock method with single-satellite ambiguity fixing and its application in LEO satellite orbit determination [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(4): 487-495. |
| [9] | GUO Rui, ZHOU Jianhua, HU Xiaogong, LI Xiaojie, LIU Li, ZHOU Shanshi, WU Shan. Precise Orbit Determination for the BDS IGSO Satellites Under the Yaw-steering Mode [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(S0): 18-27. |
| [10] | MAO Yue, SONG Xiaoyong, JIA Xiaolin, RUAN Rengui. Analysis about Parameters Selection Strategy of ECOM Solar Radiation Pressure Model for BeiDou Satellites [J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(11): 1812-1821. |
| [11] | FAN Caoming, WANG Shengli, OU Jikun. The Impact of Yaw Attitude of Eclipsing GPS/BDS Satellites on Phase Wind-up Solutions for PPP and Its Correction Model [J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(10): 1165-1170. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||