

Acta Geodaetica et Cartographica Sinica ›› 2025, Vol. 54 ›› Issue (4): 760-772.doi: 10.11947/j.AGCS.2025.20240165
• Photogrammetry and Remote Sensing • Previous Articles Next Articles
Daiwei ZHANG1( ), Xuming GE2(), Han HU2, Qing ZHU1,2, Bo XU2, Qiang WANG1
), Xuming GE2(), Han HU2, Qing ZHU1,2, Bo XU2, Qiang WANG1
Received:2024-04-19
Published:2025-05-30
Contact:
Xuming GE
E-mail:0119064@stu.lzjtu.edu.cn;xuming.ge@swjtu.edu.cn
About author:ZHANG Daiwei (1993—), male, PhD candidate, majors in panoramic photogrammetry, sensor calibration and error theory. E-mail: 0119064@stu.lzjtu.edu.cn
Supported by:CLC Number:
Daiwei ZHANG, Xuming GE, Han HU, Qing ZHU, Bo XU, Qiang WANG. Cross-modal sensor self-calibration method for highway point-line feature integrated mobile mapping system[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(4): 760-772.
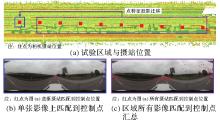
Fig. 1
Control point distribution in highway scenes"

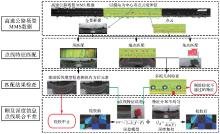
Fig. 2
Calibration flowchart of the proposed approaches"
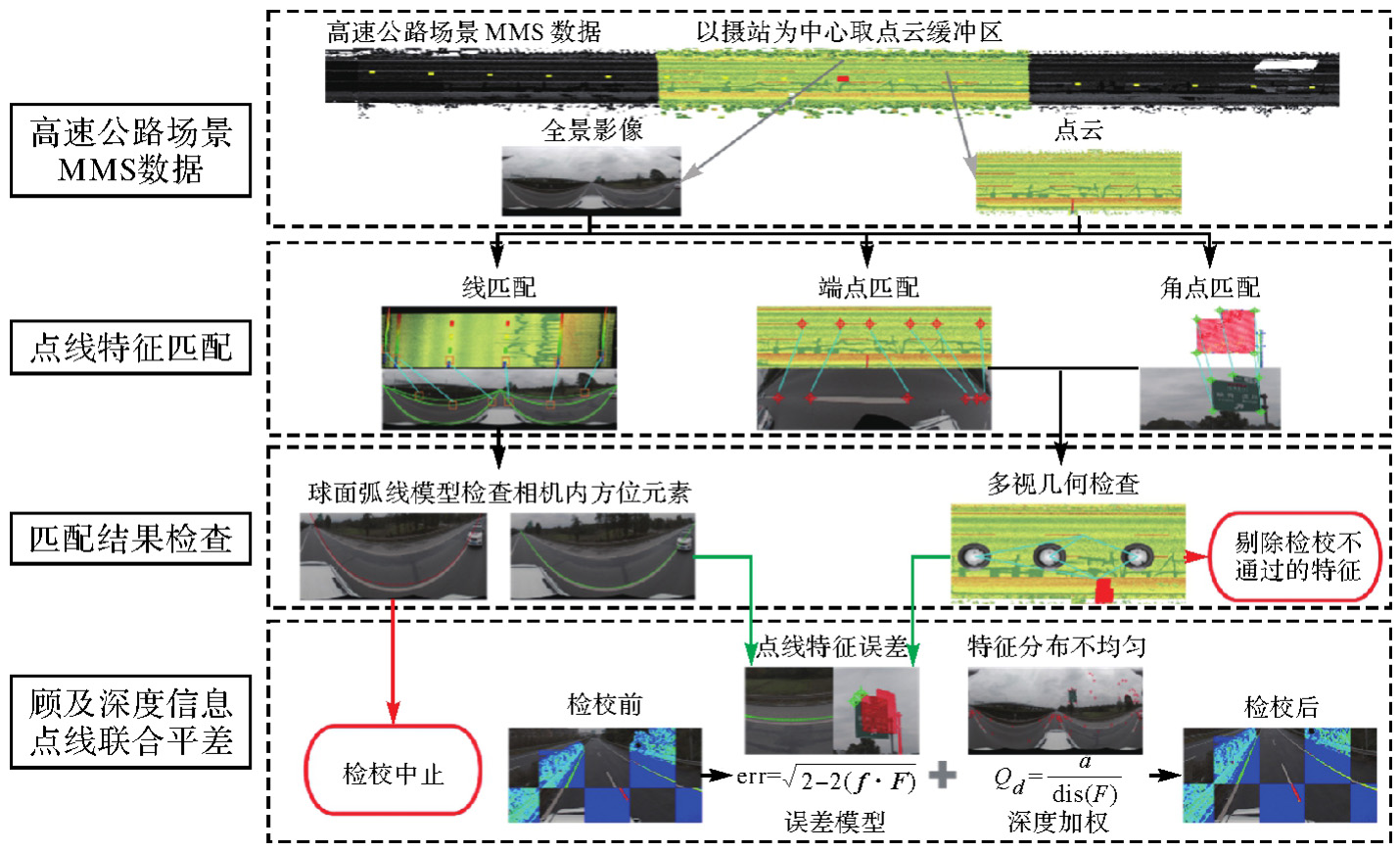

Fig. 3
The panoramic camera model"
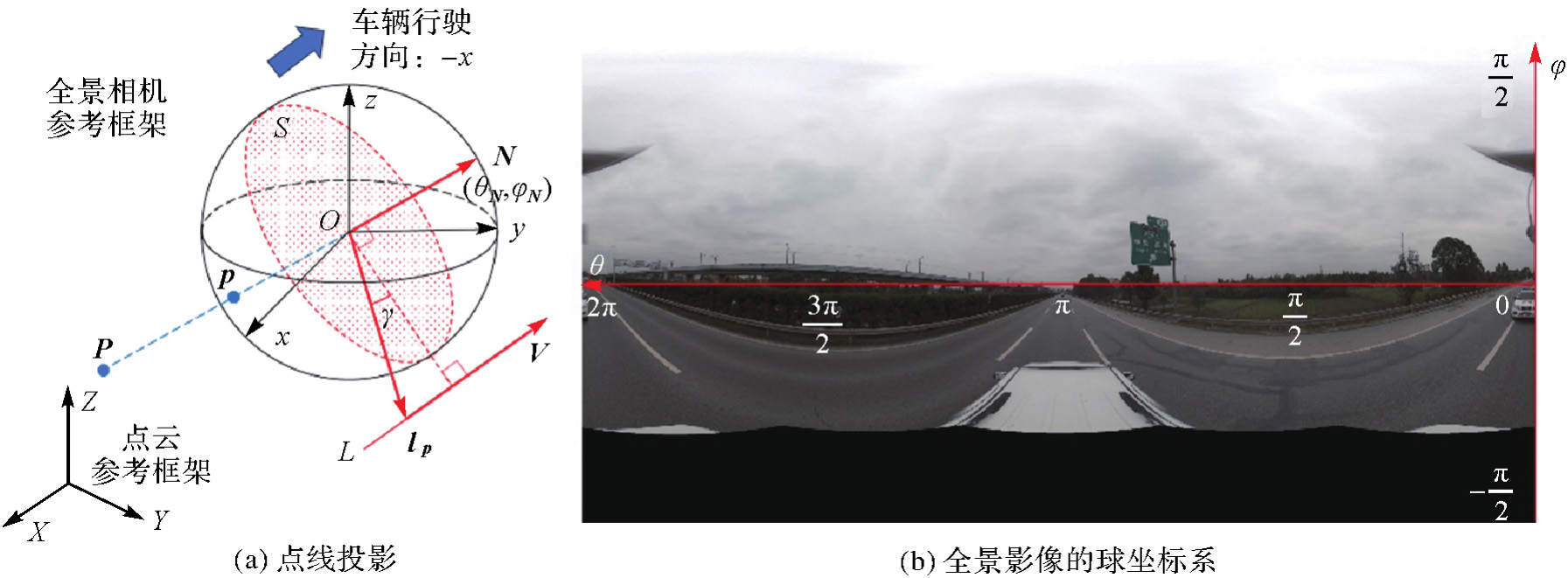
Fig. 4
Line feature matching"
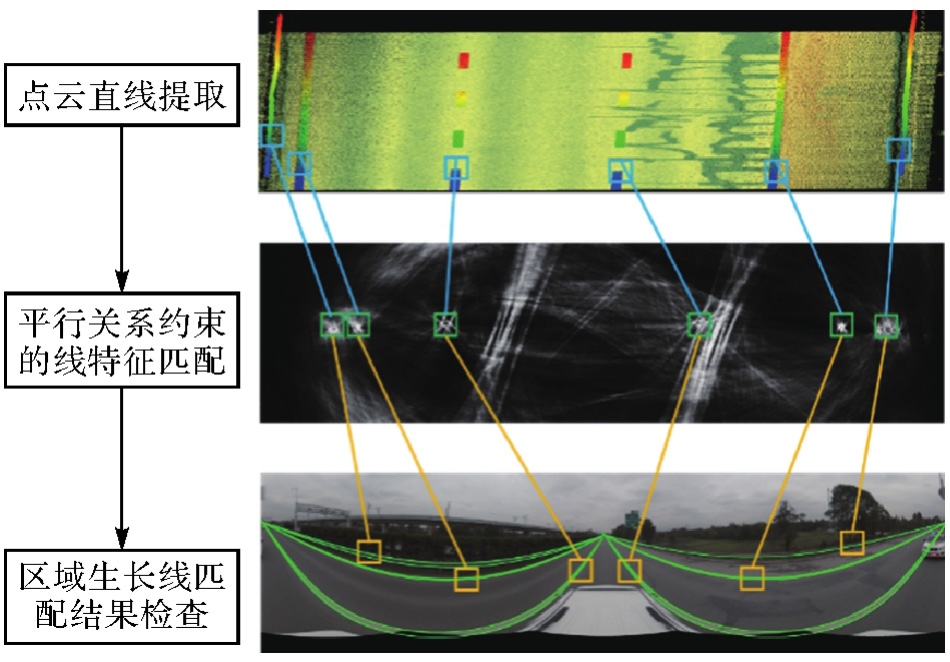

Fig. 5
Point feature matching flowchart"
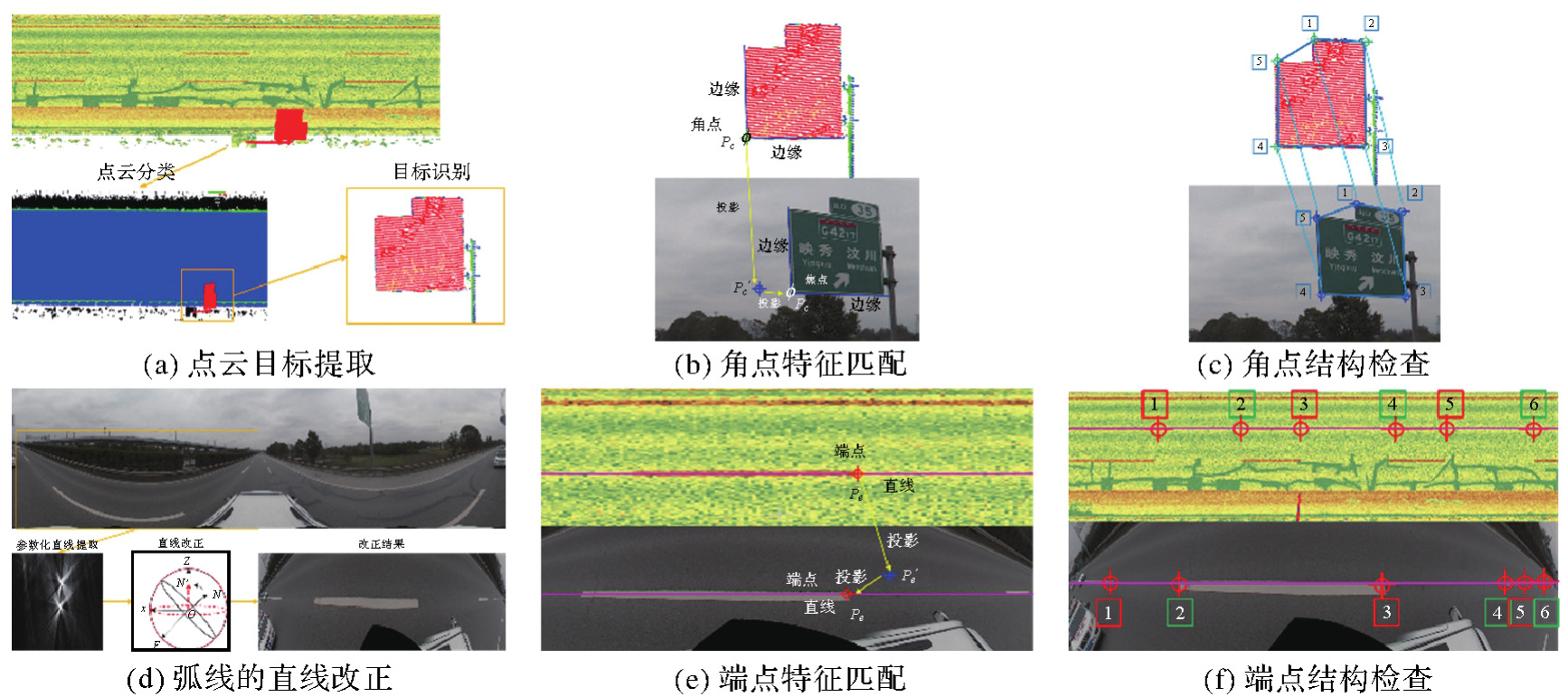
Fig. 6
Panoramic image deformation at different positions and multi-view geometry inspection"

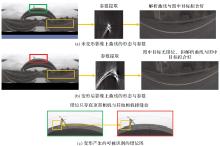
Fig. 7
The influence of deformation of the panoramic image imaging model on the morphology of line targets in the image"
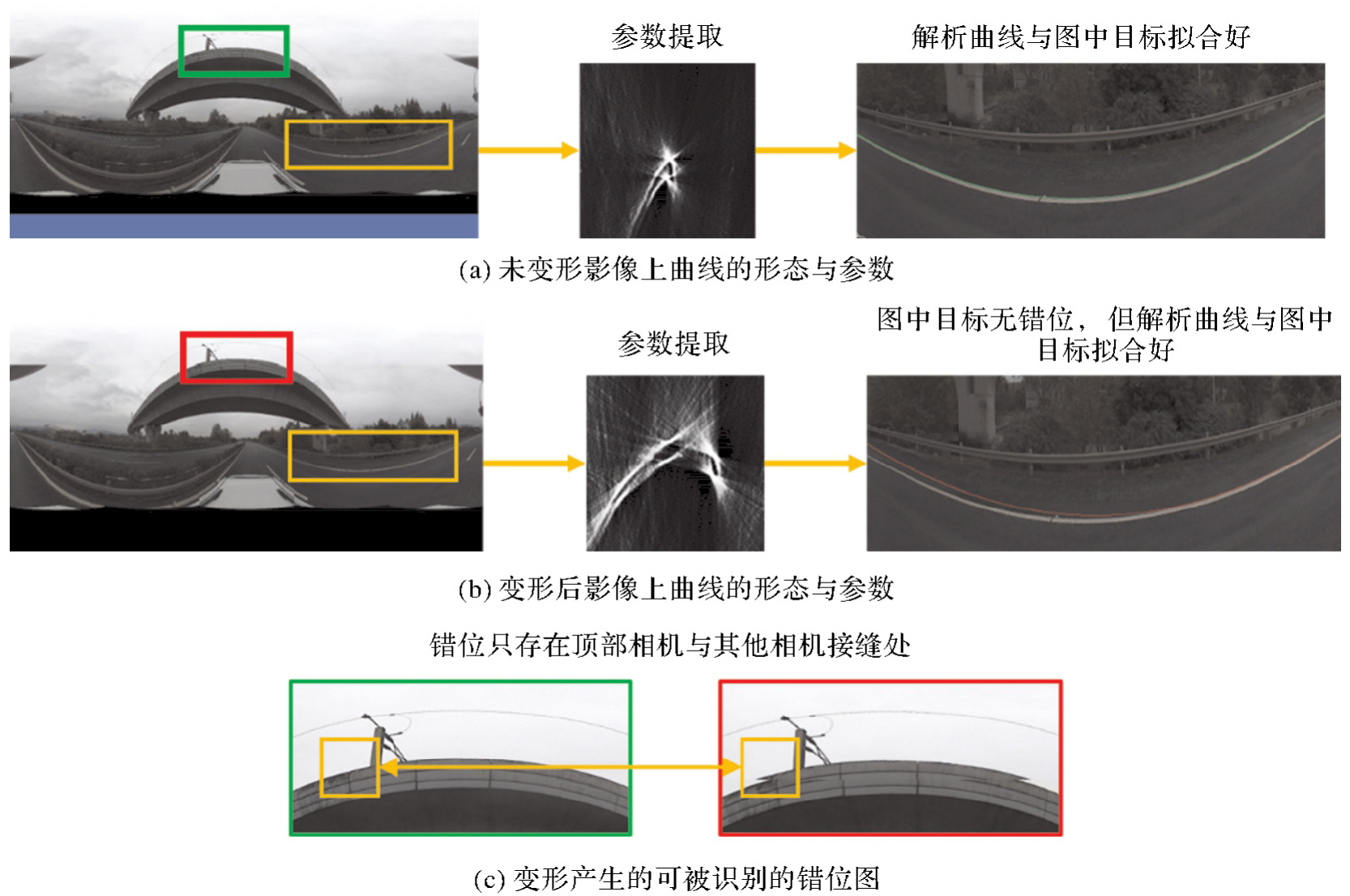
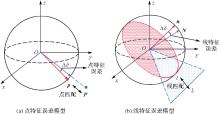
Fig. 8
Point and line adjustment model"


Fig. 9
View of the study area"

Tab. 1
MMS data acquisition parameters"
| 采集参数 | 都汶 | 丛黑 |
|---|---|---|
| 测量路段长度/km | 14 | 11 |
| 车辆行驶速度/(km/h) | 40 | 20 |
| 扫描仪扫描频率/w Hz | 50 | 50 |
| 扫描仪转速/(rotation/s) | 100 | 150 |
| 影像采集频率/(image/s) | 1 | 0.5 |
| 全景影像分辨率/像素 | 4096×2048 | 4096×2048 |

Fig. 10
Alignments of two datasets before and after calibration"

Tab. 2
Accuracy comparison between SIFT and the proposed method"
| 都汶 | 丛黑 | ||||||
|---|---|---|---|---|---|---|---|
| 检校前 | SIFT | 本文方法 | 检校前 | SIFT | 本文方法 | ||
| 改正值 | Δx/m | 0 | — | 0.102 | 0 | -0.039 | -0.041 |
| Δy/m | 0 | — | 0.079 | 0 | 0.035 | 0.040 | |
| Δz/m | 0 | — | 0.011 | 0 | -0.059 | 0.010 | |
| Δyaw/(°) | 0 | — | 0.665 | 0 | -0.475 | -0.952 | |
| Δpitch/(°) | 0 | — | 0.332 | 0 | -1.002 | 0.412 | |
| Δroll/(°) | 0 | — | -0.097 | 0 | 0.002 | -0.005 | |
| 检校结果 | Average | 8.2 | — | 2.3 | 9.1 | 5.4 | 2.5 |
| Max | 15 | — | 4 | 16 | 7 | 4 | |
| RMSE | 2.458 | — | 0.891 | 2.878 | 1.237 | 0.680 | |
Fig. 11
Accuracy comparison before and after calibration"
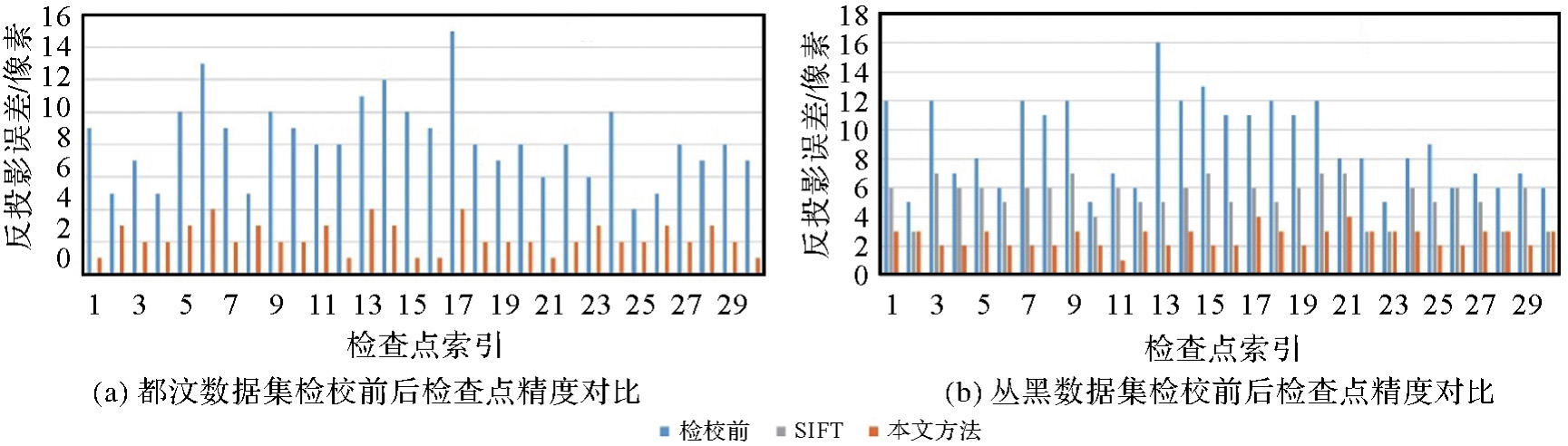
Fig. 12
Misaligned SIFT point illustration"
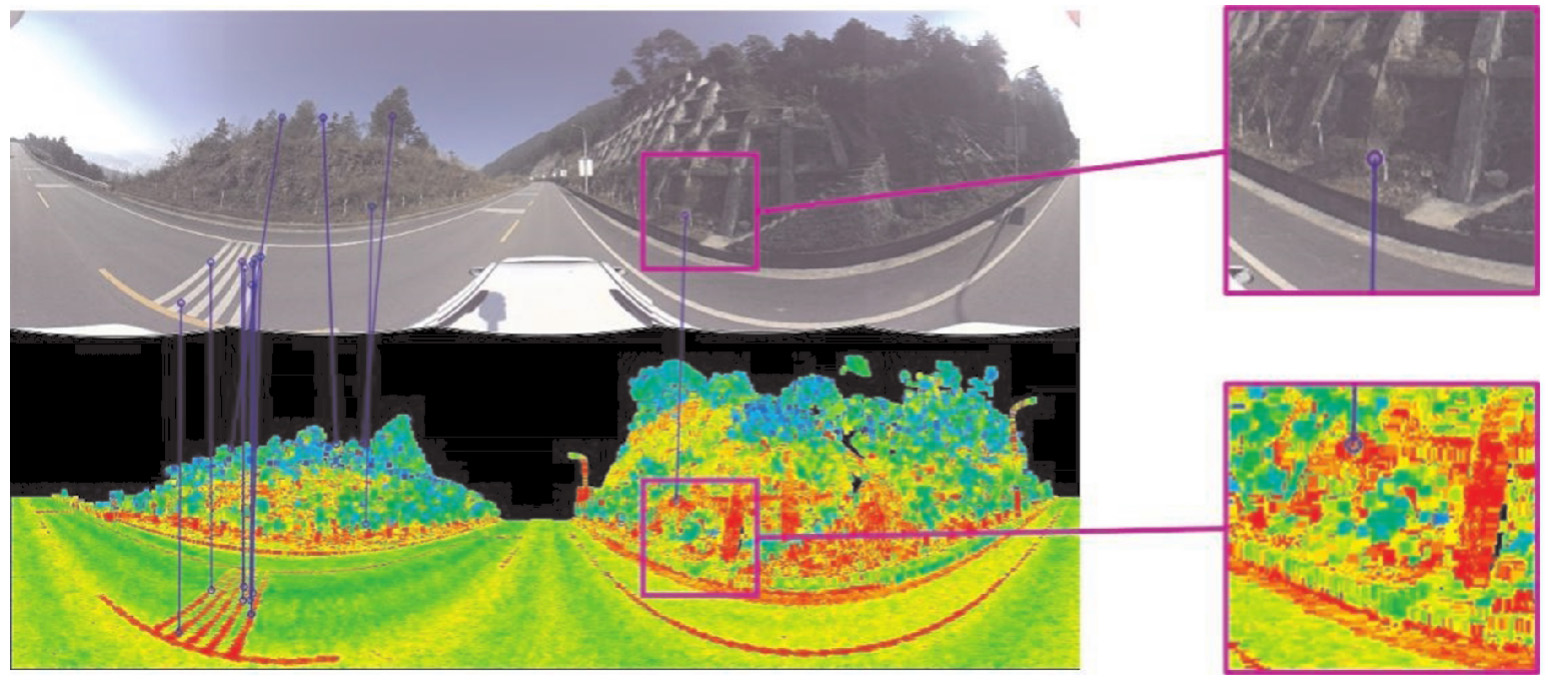
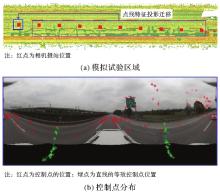
Fig. 13
Simulated experimental area and the distribution of control points"
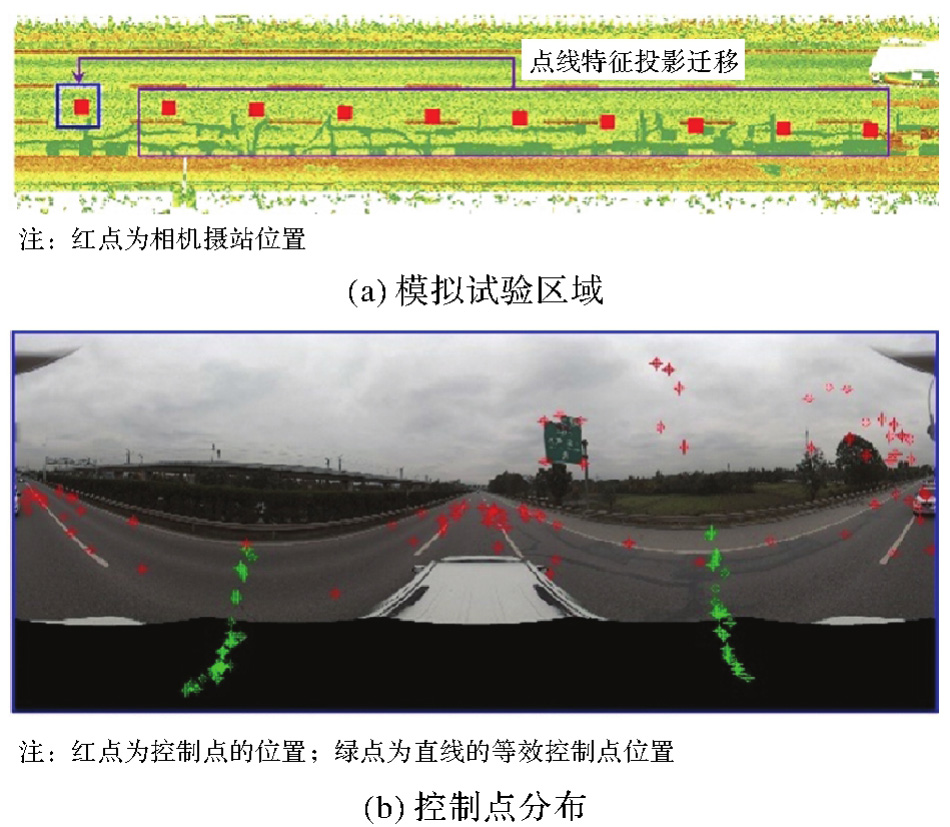

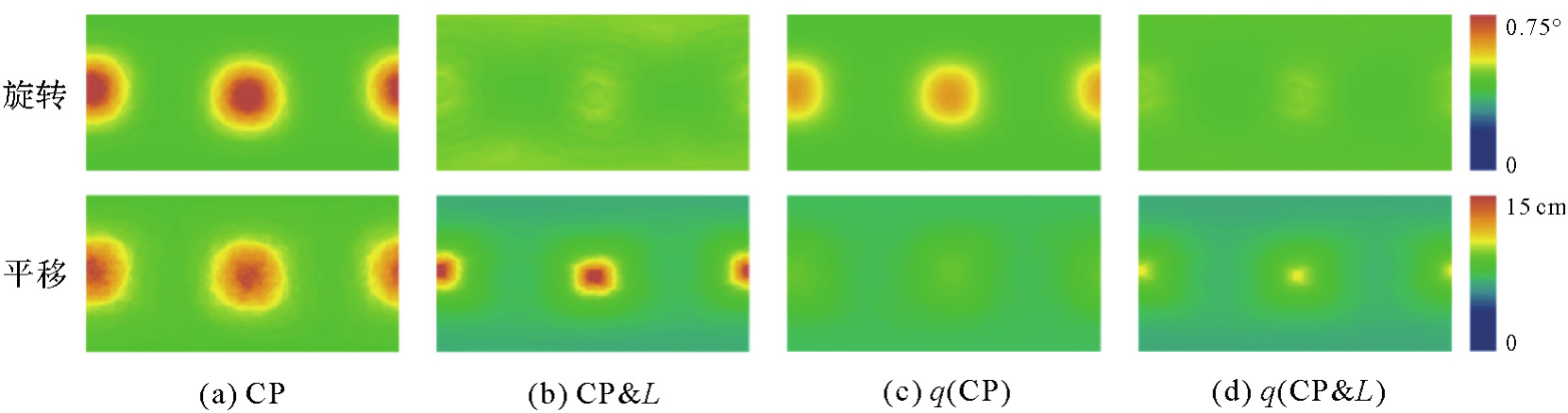
Fig. 14
The simulated calculation results"
| [1] | PUENTE I, GONZÁLEZ-JORGE H, MARTÍNEZ-SÁNCHEZ J, et al. Review of mobile mapping and surveying technologies[J]. Measurement, 2013, 46(7): 2127-2145. |
| [2] | CUI T, JI S, SHAN J, et al. Line-based registration of panoramic images and LiDAR point clouds for mobile mapping[J]. Sensors (Basel), 2016, 17(1): E70. |
| [3] | HUSSNAIN Z, ELBERINK S O, VOSSELMAN G. Automatic extraction of accurate 3D tie points for trajectory adjustment of mobile laser scanners using aerial imagery[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 154: 41-58. |
| [4] | BAO Sheng, SHI Wenzhong, CHEN Pengxin, et al. A systematic mapping framework for backpack mobile mapping system in common monotonous environments[J]. Measurement, 2022, 197: 111243. |
| [5] | ARMENAKIS C, GAO Yu, GEOMATICS G S. Co-registration of LiDAR and photogrammetric data for updating building databases[J]. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2010, 38(2): 96-100. |
| [6] | ZHANG Yi, CUI Zhifang. Registration of terrestrial LiDAR and panoramic imagery using the spherical epipolar line and spherical absolute orientation model[J]. IEEE Sensors Journal, 2022, 22(13): 13088-13098. |
| [7] | PANDEY G, MCBRIDE J R, SAVARESE S, et al. Automatic extrinsic calibration of vision and LiDAR by maximizing mutual information[J]. Journal of Field Robotics, 2015, 32(5): 696-722. |
| [8] | MILED M, SOHEILIAN B, HABETS E, et al. Hybrid online mobile laser scanner calibration through image alignment by mutual information[J]. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2016, 3(1): 25-31. |
| [9] | WANG Ruisheng, FERRIE F P, MACFARLANE J. Automatic registration of mobile LiDAR and spherical panoramas[C]//Proceedings of 2012 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops. Providence: IEEE, 2012: 33-40. |
| [10] | PARMEHR E G, FRASER C S, ZHANG Chunsun, et al. Automatic registration of optical imagery with 3D LiDAR data using statistical similarity[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 88: 28-40. |
| [11] | GUISLAIN M, DIGNE J, CHAINE R, et al. Fine scale image registration in large-scale urban LiDAR point sets[J]. Computer Vision and Image Understanding, 2017, 157: 90-102. |
| [12] | ZHAO Yipu, WANG Yuanfang, TSAI Y. 2D-image to 3D-range registration in urban environments via scene categorization and combination of similarity measurements[C]//Proceedings of 2016 IEEE International Conference on Robotics and Automation. Stockholm: IEEE, 2016: 1866-1872. |
| [13] | CORSINI M, DELLEPIANE M, GANOVELLI F, et al. Fully automatic registration of image sets on approximate geometry[J]. International Journal of Computer Vision, 2013, 102(1): 91-111. |
| [14] | LEVINSON J, THRUN S. Automatic online calibration of cameras and lasers[C]//Proceedings of 2013 Robotics: Science and Systems. Robotics: Science and Systems Foundation, 2013. |
| [15] | WANG Yuan, LI Yuhao, CHEN Yiping, et al. Automatic registration of point cloud and panoramic images in urban scenes based on pole matching[J]. International Journal of Applied Earth Observation and Geoinformation, 2022, 115: 103083. |
| [16] | ZHENG Shunyi, HUANG Rongyong, ZHOU Yang. Registration of optical images with LiDAR data and its accuracy assessment[J]. Photogrammetric Engineering & Remote Sensing, 2013, 79(8): 731-741. |
| [17] | YANG Bisheng, CHEN Chi. Automatic registration of UAV-borne sequent images and LiDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 101: 262-274. |
| [18] | ISHIKAWA R, OISHI T, IKEUCHI K. LiDAR and camera calibration using motions estimated by sensor fusion odometry[C]//Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 7342-7349. |
| [19] | LI Na, HUANG Xianfeng, ZHANG Fan, et al. Registration of aerial imagery and LiDAR data in desert areas using sand ridges[J]. The Photogrammetric Record, 2015, 30(151): 263-278. |
| [20] | LI Jianping, YANG Bisheng, CHEN Chi, et al. Automatic registration of panoramic image sequence and mobile laser scanning data using semantic features[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018, 136: 41-57. |
| [21] | HOFMANN S, EGGERT D, BRENNER C. Skyline matching based camera orientation from images and mobile mapping point clouds[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2014, II-5: 181-188. |
| [22] | ALBA M, BARAZZETTI L, SCAIONI M, et al. Automatic registration of multiple laser scans using panoramicrgb and intensity images[J]. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2012, ⅩⅩⅩⅧ-5/W12: 49-54. |
| [23] | LOWE D G. Distinctive image features from scale-invariant key points[J]. International Journal of Computer Vision, 2004, 60(2): 91-110. |
| [24] | MOREL J M, YU Guoshen. ASIFT: a new framework for fully affine invariant image comparison[J]. SIAM Journal on Imaging Sciences, 2009, 2(2): 438-469. |
| [25] | SCHENK T. From point-based to feature-based aerial triangulation[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2004, 58(5/6): 315-329. |
| [26] | SHENG Qinghong, WANG Qi, ZHANG Xinyue, et al. Registration of urban aerial image and LiDAR based on line vectors[J]. Applied Sciences, 2017, 7(10): 965. |
| [27] | VON GIOI R G, JAKUBOWICZ J, MOREL J M, et al. LSD: a fast line segment detector with a false detection control[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(4): 722-732. |
| [28] | ARMENAKIS C, GAO Yu, GEOMATICS G S. Co-registration of LiDAR and photogrammetric data for updating building databases[C]//Proceedings of 2010 Core Spatial Databases-Updating, Maintenance and Services-from Theory to Practice. [S.l.]: IEEE, 2010. |
| [29] | WEN Chenglu, SUN Xiaotian, HOU Shiwei, et al. Line structure-based indoor and outdoor integration using backpacked and TLS point cloud data[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(11): 1790-1794. |
| [30] | LI Kai, ZHANG Xudong, LI Kun, et al. Vision global localization with semantic segmentation and interest feature points[C]//Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 4581-4587. |
| [31] | TAN Jun, LI Jian, AN Xiangjing, et al. Robust curb detection with fusion of 3D-LiDAR and camera data[J]. Sensors, 2014, 14(5): 9046-9073. |
| [32] | CHOI S, KIM T, YU W. Performance evaluation of RANSAC family[C]//Proceedings of 2009 British Machine Vision Conference. London: British Machine Vision Association, 2009: 1-12. |
| [33] | WEI Dong, ZHANG Yongjun, LIU Xinyi, et al. Robust line segment matching across views via ranking the line-point graph[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2021, 171: 49-62. |
| [34] |
朱宁宁, 杨必胜, 陈驰, 等. 点-线特征联合的全景图像位姿解算方法[J]. 测绘学报, 2023, 52(2): 218-229. DOI:.
doi: 10.11947/j.AGCS.2023.20210565 |
|
ZHU Ningning, YANG Bisheng, CHEN Chi, et al. Position-attitude calculation of panoramic image based on point-line feature combination[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(2): 218-229. DOI:.
doi: 10.11947/j.AGCS.2023.20210565 |
|
| [35] | HU Qingyong, YANG Bo, XIE Linhai, et al. RandLA-net: efficient semantic segmentation of large-scale point clouds[C]//Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 11105-11114. |
| [36] | ZHANG Daiwei, XU Bo, HU Han, et al. Spherical Hough transform for robust line detection toward a 2D-3D integrated mobile mapping system[J]. Photogrammetric Engineering & Remote Sensing, 2023, 89(5): 311-320. |
| [37] | JIA Xin, ZHU Qing, GE Xuming, et al. Robust guardrail instantiation and trajectory optimization of complex highways based on mobile laser scanning point clouds[J]. Photogrammetric Engineering & Remote Sensing, 2023, 89(3): 151-161. |
| [38] | MA Ruifeng, GE Xuming, ZHU Qing, et al. Model-driven precise degradation analysis method of highway marking using mobile laser scanning point clouds[J]. Photogrammetric Engineering & Remote Sensing, 2023, 89(4): 245-258. |
| [39] |
朱宁宁. 柱面全景图像拼接方法的仿真分析[J]. 测绘学报, 2017, 46(4): 487-497. DOI:.
doi: 10.11947/j.AGCS.2017.20160456 |
|
ZHU Ningning. Simulation analysis of cylindrical panoramic image mosaic[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(4): 487-497. DOI:.
doi: 10.11947/j.AGCS.2017.20160456 |
|
| [40] | ZHU Ningning. Simulation analysis of spherical panoramic mosaic[J]. Signal Processing, 2019, 158: 190-200. |
| [41] |
季顺平, 秦梓杰. 多镜头组合式相机的全景SLAM[J]. 测绘学报, 2019, 48(10): 1254-1265. DOI:.
doi: 10.11947/j.AGCS.2019.20180443 |
|
JI Shunping, QIN Zijie. Panoramic SLAM for multi-camera rig[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(10): 1254-1265. DOI:.
doi: 10.11947/j.AGCS.2019.20180443 |
|
| [42] | ZHU Ningning, JIA Yonghong, HUANG Xia. Semiautomatically register MMS LiDAR points and panoramic image sequence using road Lamp and lane[J]. Photogrammetric Engineering & Remote Sensing, 2019, 85(11): 829-40. |
| [1] | CHEN Chi, YANG Bisheng, TIAN Mao, LI Jianping, ZOU Xianghong, WU Weitong, SONG Yiheng. Automatic Registration of Vehicle-borne Mobile Mapping Laser Point Cloud and Sequent Panoramas [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(2): 215-224. |
| [2] | SHI Limei, ZHAO Hongrui, LI Minghai, FU Gang, LI Cong. Extrinsic Calibration for Vehicle-based Mobile Mapping System [J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(1): 52-58. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||