

Acta Geodaetica et Cartographica Sinica ›› 2026, Vol. 55 ›› Issue (2): 301-314.doi: 10.11947/j.AGCS.2026.20250158
• Geodesy and Navigation • Previous Articles Next Articles
Yi LI1( ), Li WANG1(), Bao SHU1, Youjian XU1, Mengran LI1, Xiaojun LIU1, Xin PENG2
), Li WANG1(), Bao SHU1, Youjian XU1, Mengran LI1, Xiaojun LIU1, Xin PENG2
Received:2025-04-28
Revised:2026-01-15
Online:2026-03-13
Published:2026-03-13
Contact:
Li WANG
E-mail:yi.li@chd.edu.cn;wangli@chd.edu.cn
About author:LI Yi (1999—), male, PhD candidate, majors in GNSS/INS integrated navigation and integrity monitoring. E-mail: yi.li@chd.edu.cn
Supported by:CLC Number:
Yi LI, Li WANG, Bao SHU, Youjian XU, Mengran LI, Xiaojun LIU, Xin PENG. An optimization algorithm for RTK integrity monitoring based on solution separation for vehicle applications[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(2): 301-314.

Fig. 1
Vehicle trajectories and number of visible satellites (dataset Ⅰ)"
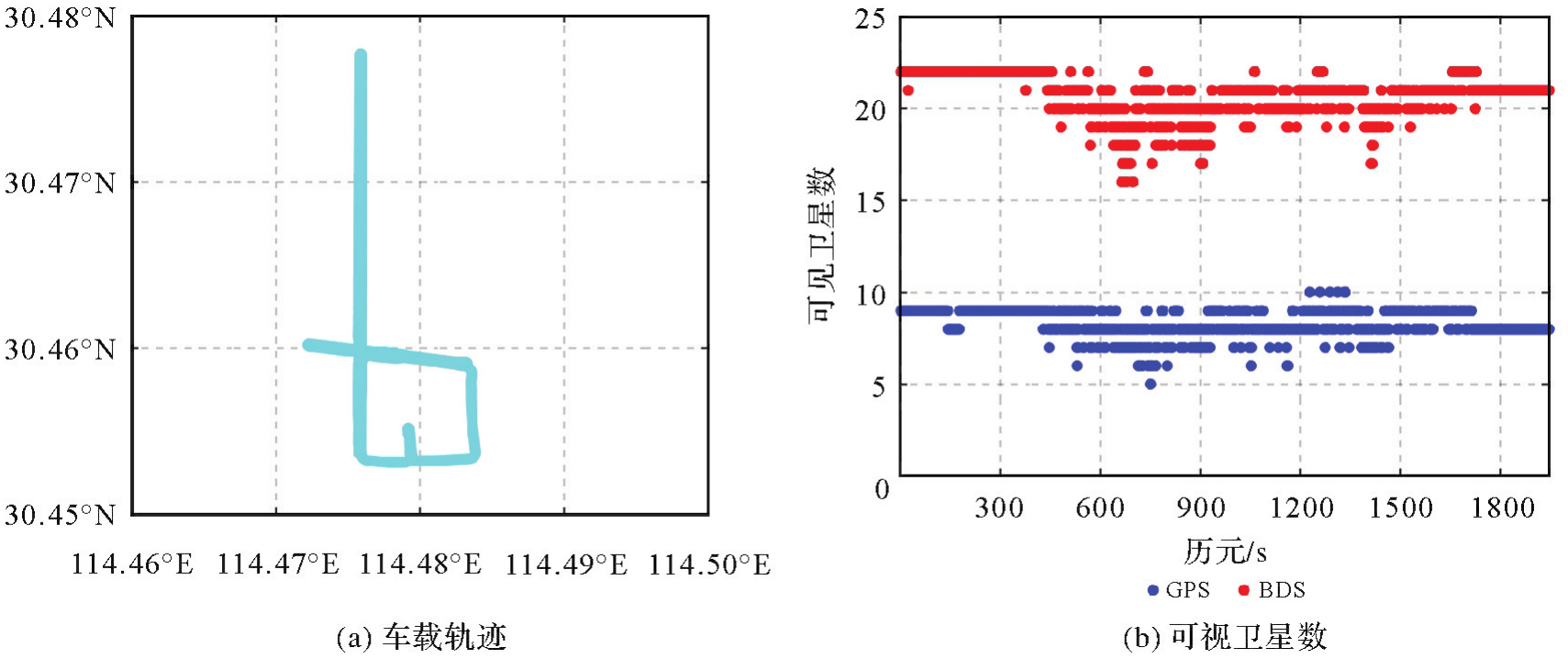

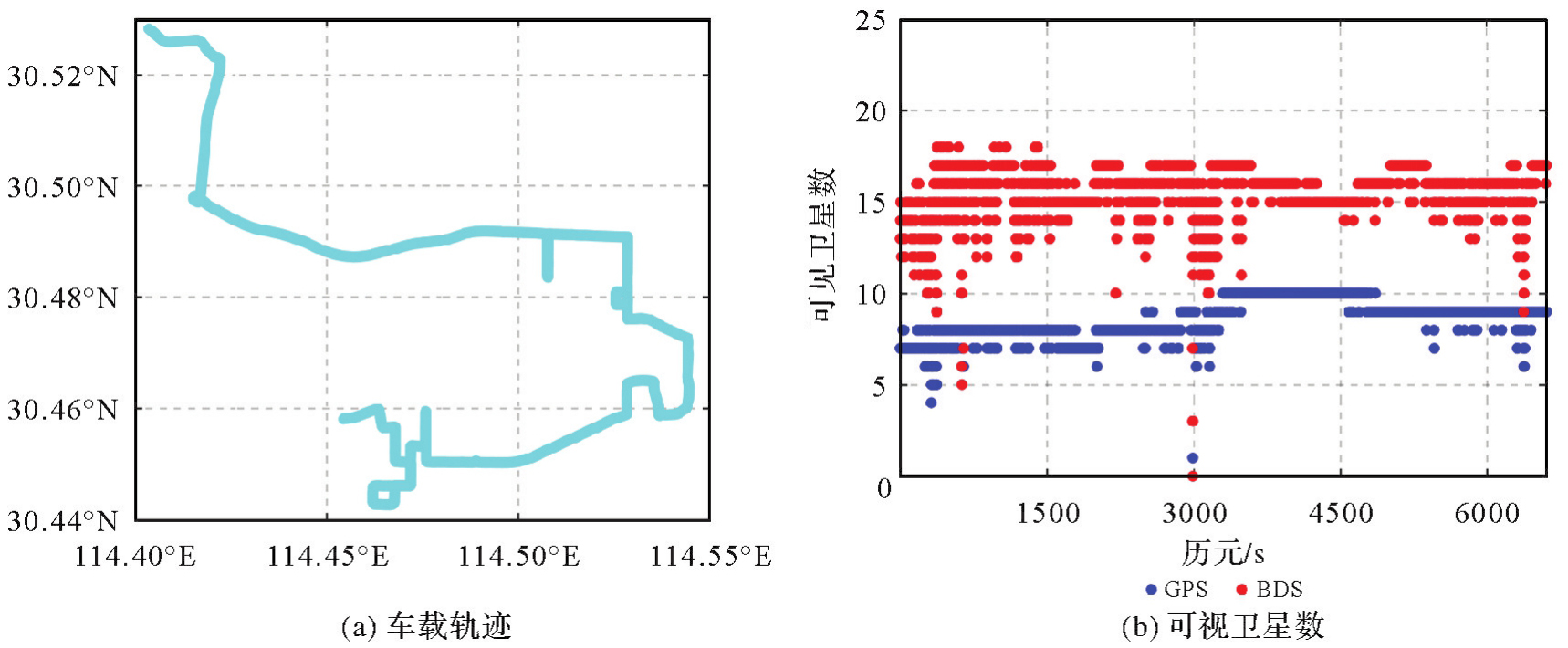
Fig. 2
Vehicle trajectories and number of visible satellites (dataset Ⅱ)"
Tab. 1
RTK solution strategy"
| 类型 | 内容 |
|---|---|
| 卫星系统 | GPS/BDS |
| 观测频点 | L1/B1 |
| 截止高度角/(°) | 10 |
| 定位解模式 | 动态解+前向滤波 |
| 模糊度固定模式 | 部分模糊度固定+单历元解算 |
| 模糊度固定阈值 | 固定成功率>0.999 |
| 先验故障概率[ | 10-5 |
| 完好性风险[ | 10-7 |
| 连续性风险/h | 10-3 |

Fig. 3
Performances of different fault detection methods"
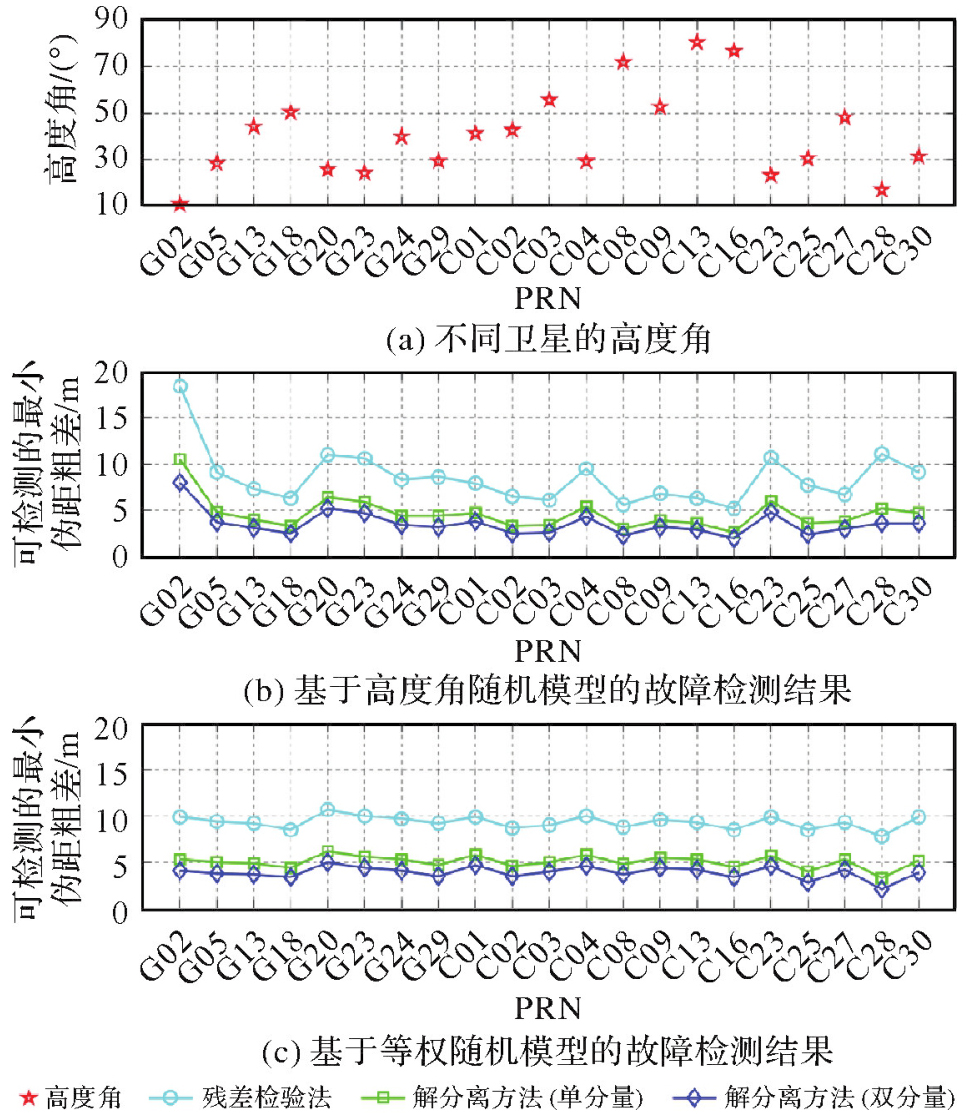
Tab. 2
Minimum detectable pseudorange gross error by different fault detection methods for each PRN"
| PRN | 残差检验法 | 解分离(单分量) | 解分离(双分量) | PRN | 残差检验法 | 解分离(单分量) | 解分离(双分量) |
|---|---|---|---|---|---|---|---|
| G02 | 18.4(9.9) | 10.5(5.3) | 8.0(4.1) | C04 | 9.5(10.0) | 5.4(5.8) | 4.3(4.6) |
| G05 | 9.1(9.4) | 4.8(5.0) | 3.7(3.8) | C08 | 5.6(8.8) | 3.0(4.8) | 2.3(3.7) |
| G13 | 7.3(9.2) | 4.0(4.9) | 3.1(3.7) | C09 | 6.8(9.6) | 3.9(5.5) | 3.2(4.4) |
| G18 | 6.3(8.5) | 3.3(4.4) | 2.5(3.4) | C13 | 6.3(9.3) | 3.6(5.3) | 2.9(4.2) |
| G20 | 11.0(10.7) | 6.4(6.2) | 5.2(5.0) | C16 | 5.2(8.5) | 2.6(4.5) | 2.0(3.4) |
| G23 | 10.6(10.0) | 5.9(5.6) | 4.7(4.4) | C23 | 10.7(9.9) | 6.0(5.7) | 4.8(4.6) |
| G24 | 8.3(9.7) | 4.4(5.3) | 3.4(4.1) | C25 | 7.7(8.5) | 3.6(4.0) | 2.4(2.8) |
| G29 | 8.6(9.2) | 4.4(4.7) | 3.2(3.5) | C27 | 6.7(9.3) | 3.8(5.3) | 3.0(4.2) |
| C01 | 7.9(9.9) | 4.7(5.8) | 3.8(4.7) | C28 | 11.1(7.8) | 5.2(3.3) | 3.6(2.1) |
| C02 | 6.5(8.7) | 3.3(4.6) | 2.5(3.5) | C30 | 9.1(9.9) | 4.7(5.2) | 3.6(3.9) |
| C03 | 6.1(9.0) | 3.4(5.0) | 2.6(4.0) | 均值 | 8.5(9.3) | 4.6(5.0) | 3.6(3.9) |
Fig. 4
RTK positioning errors of different fault detection methods (dataset Ⅰ)"
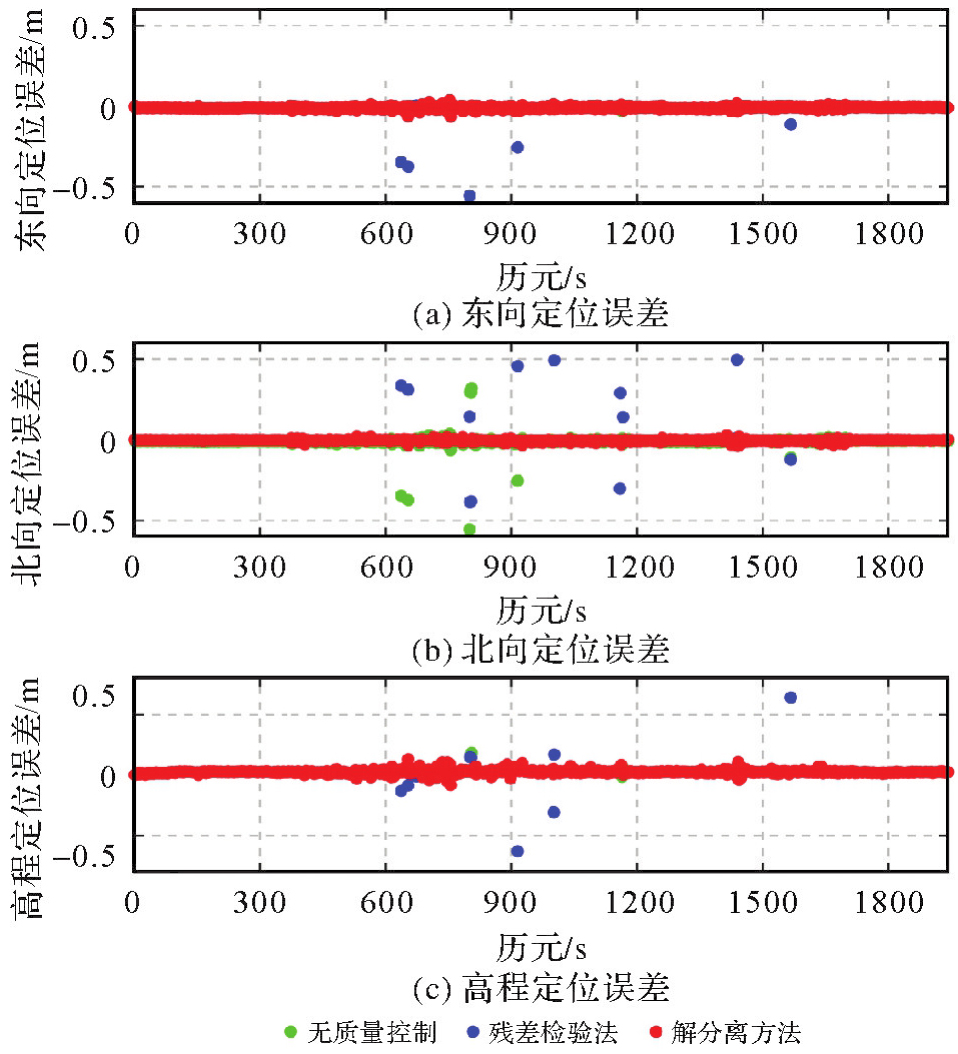
Tab. 3
RTK positioning errors and incorrect ambiguity fix for different fault detection methods (dataset Ⅰ)"
| 方案 | RMS/m | 模糊度错误固定历元数 | ||
|---|---|---|---|---|
| 东向 | 北向 | 高程 | ||
| 无质量控制 | 0.15 | 0.15 | 0.24 | 17 |
| 残差检验法 | 0.15 | 0.15 | 0.24 | 17 |
| 解分离方法 | 0.01 | 0.02 | 0.03 | 0 |

Fig. 5
PRNs with incorrect fixed ambiguity and its effect on the positioning error (dataset Ⅰ)"
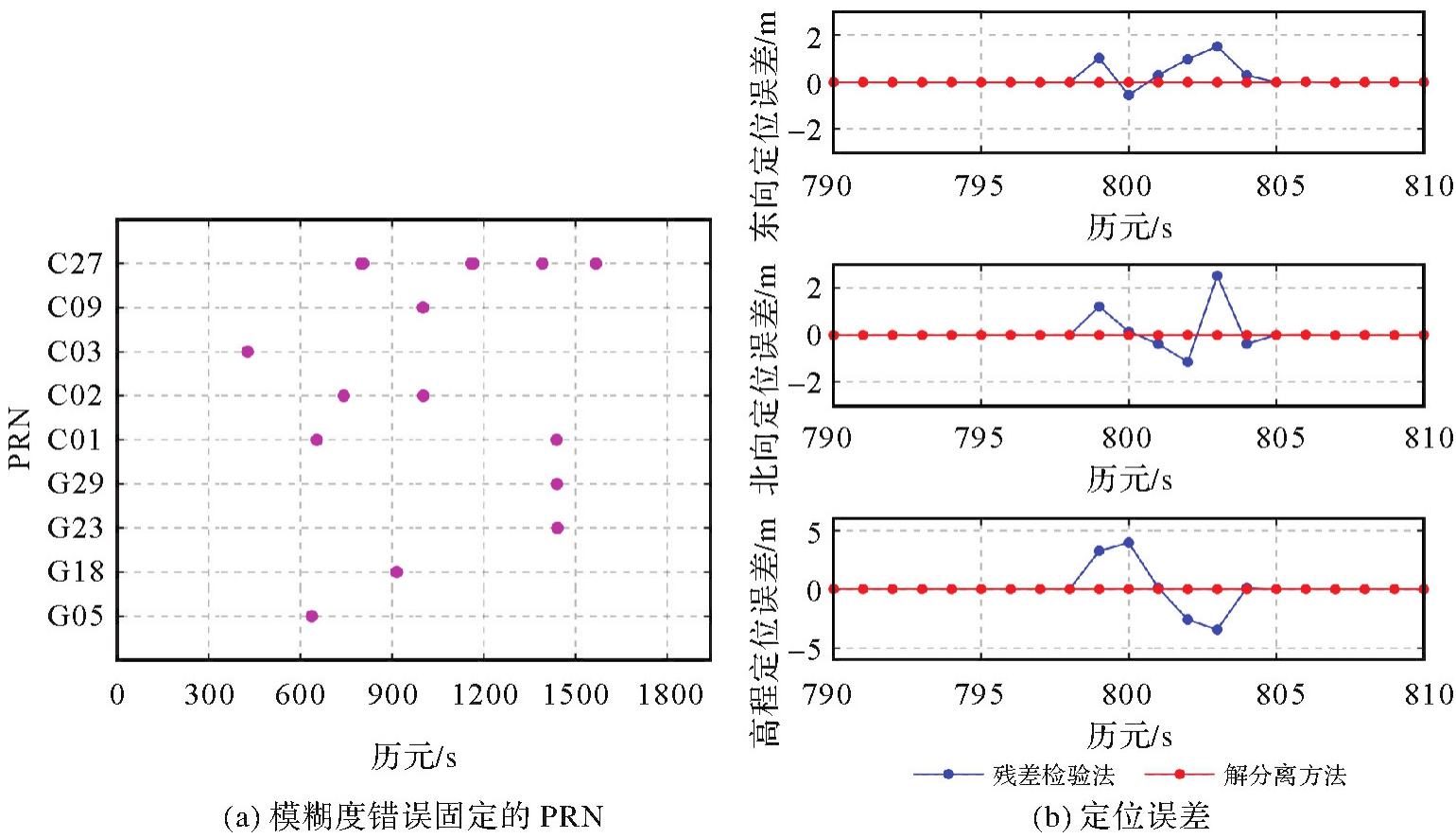

Fig. 6
RTK positioning errors with different fault detection methods (dataset Ⅱ)"
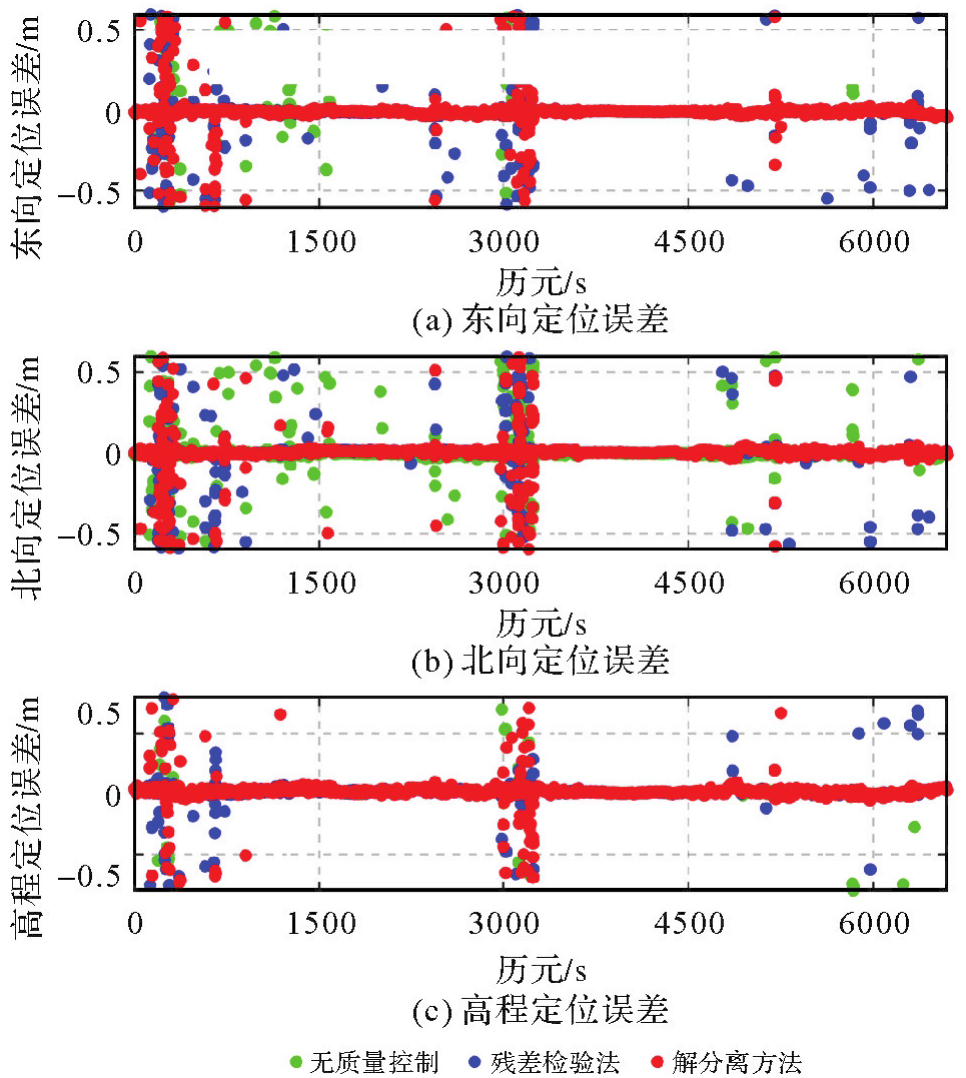
Tab. 4
RTK positioning errors and incorrect ambiguity fix for different fault detection methods (dataset Ⅱ)"
| 方案 | RMS/m | 模糊度错误固定历元数 | ||
|---|---|---|---|---|
| 东向 | 北向 | 高程 | ||
| 无质量控制 | 2.46 | 3.98 | 6.75 | 1708 |
| 残差检验法 | 0.24 | 0.26 | 0.79 | 111 |
| 解分离方法 | 0.22 | 0.23 | 0.52 | 90 |

Fig. 7
PRNs with incorrect fixed ambiguity and its effect on the positioning errors (dataset Ⅱ)"
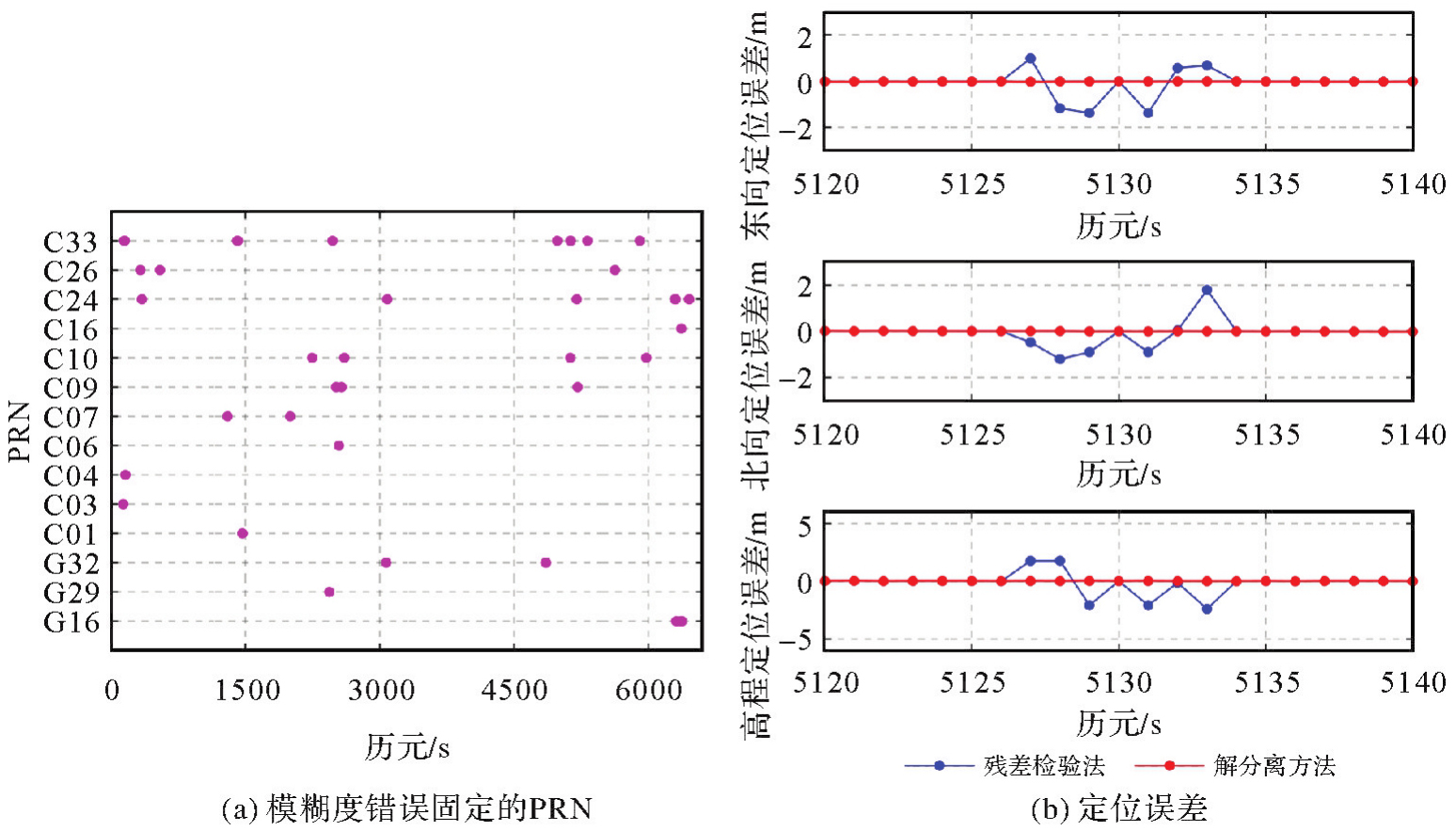
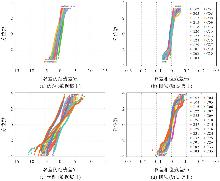
Fig. 8
QQ plots of double difference pseudorange and phase residuals for dataset Ⅰ and dataset Ⅱ"
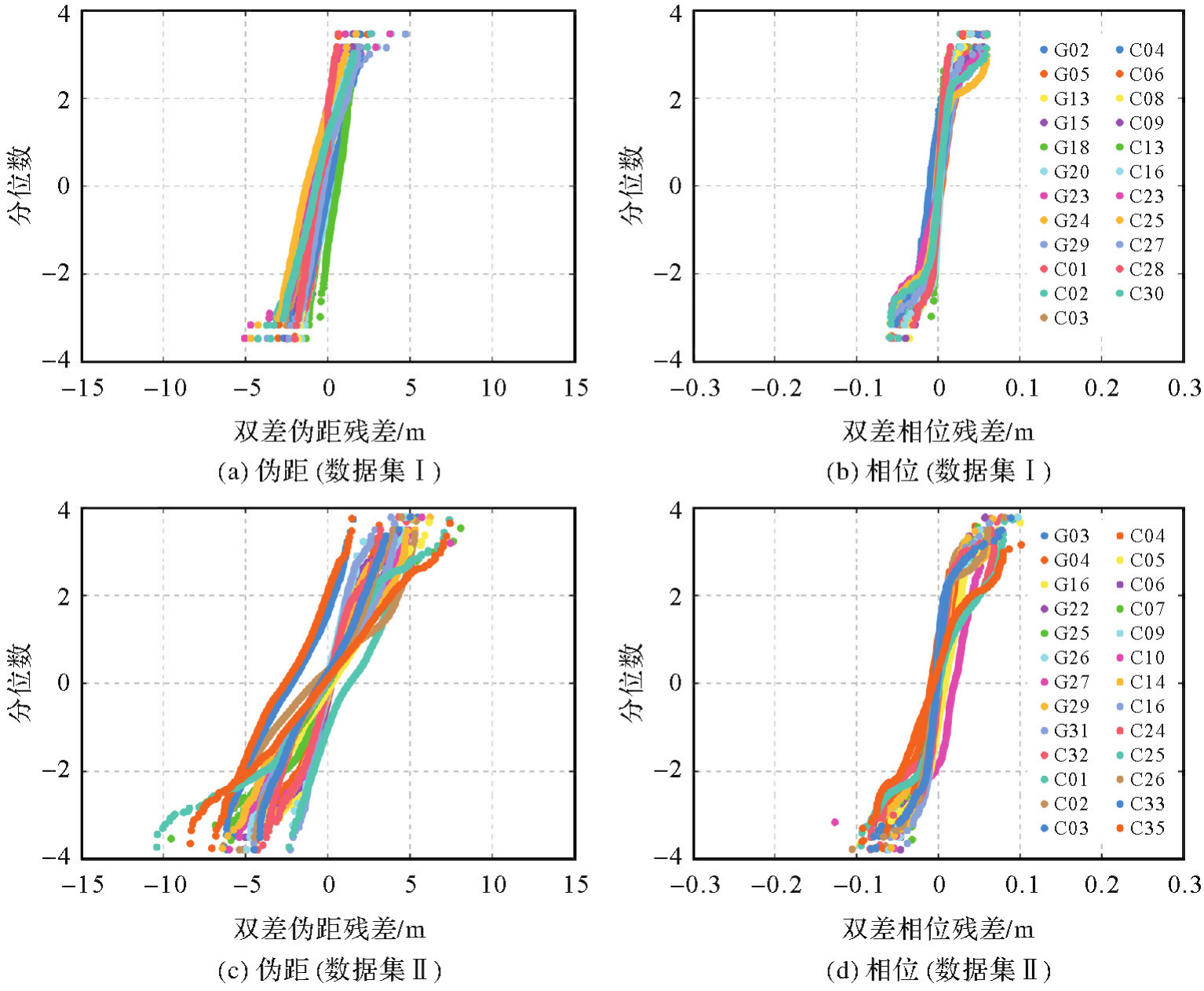
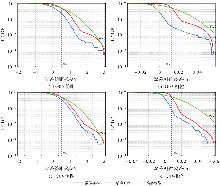
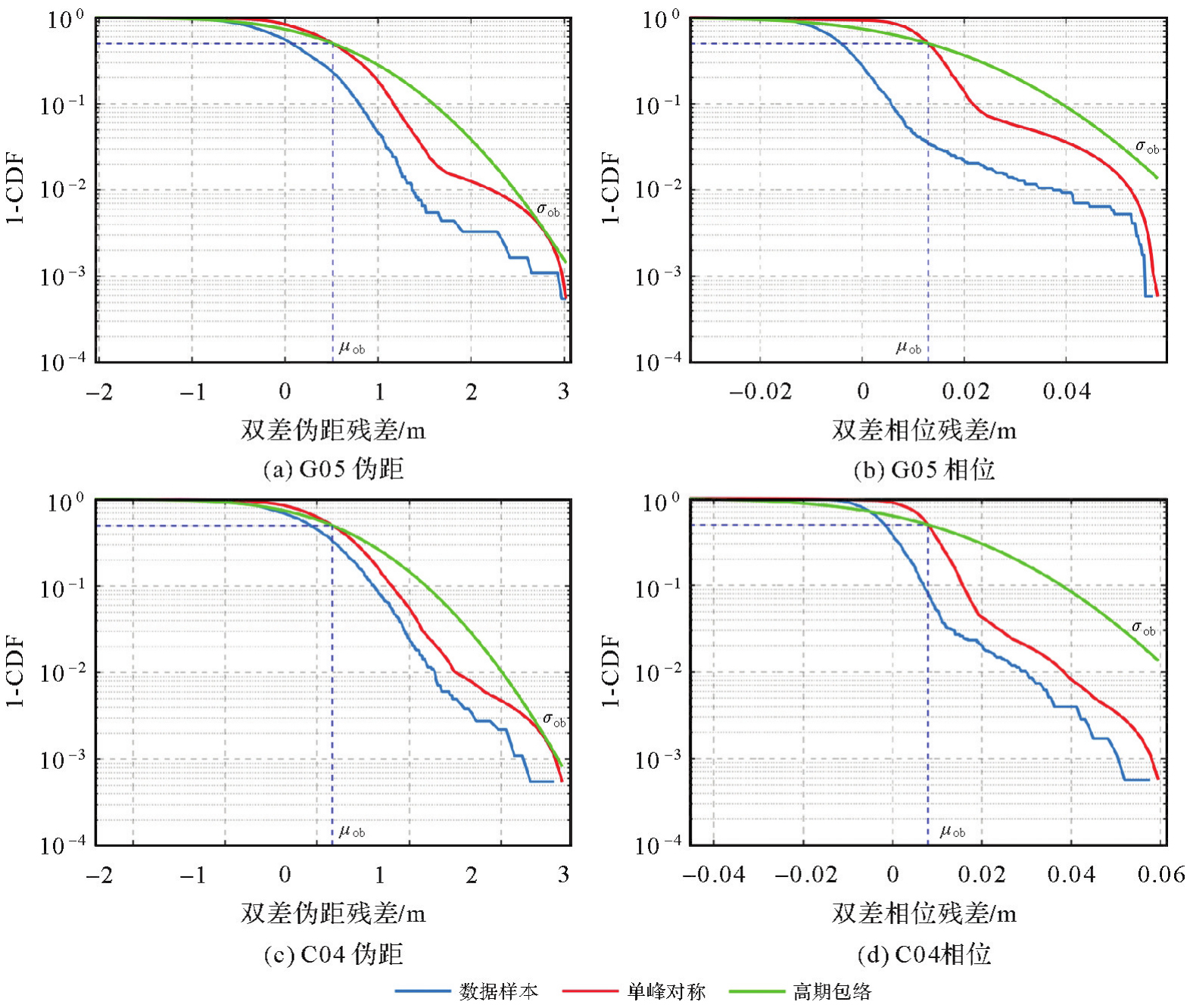
Fig. 9
Overbounding effect of G05 and C04 observation residuals"
Tab. 5
Overbounding parameters of dataset Ⅰ"
| PRN | μob | σob | PRN | μob | σob |
|---|---|---|---|---|---|
| G02 | 0.882(0.014) | 0.621(0.017) | C04 | 0.169(0.008) | 0.793(0.023) |
| G05 | 0.514(0.013) | 0.840(0.024) | C06 | 0.735(0.018) | 0.451(0.018) |
| G13 | 0.190(0.006) | 0.628(0.025) | C08 | 0.423(0.008) | 0.594(0.017) |
| G15 | 0.472(0.004) | 0.662(0.005) | C09 | 0.628(0.012) | 0.591(0.021) |
| G18 | 0.155(0.009) | 0.463(0.021) | C13 | 0.661(0.004) | 0.698(0.008) |
| G20 | 1.019(0.013) | 0.904(0.020) | C16 | 0.636(0.016) | 0.526(0.018) |
| G23 | 0.598(0.009) | 1.011(0.021) | C23 | 1.858(0.015) | 1.021(0.025) |
| G24 | 0.573(0.011) | 0.622(0.020) | C25 | 1.459(0.015) | 1.012(0.022) |
| G29 | 0.807(0.006) | 1.241(0.025) | C27 | 0.355(0.014) | 0.772(0.025) |
| C01 | 0.163(0.008) | 0.562(0.021) | C28 | 0.575(0.017) | 0.443(0.027) |
| C02 | 1.255(0.009) | 0.837(0.018) | C30 | 0.957(0.026) | 1.033(0.022) |
| C03 | 0.832(0.013) | 0.816(0.020) |
Tab. 6
Overbounding parameters of dataset Ⅱ"
| PRN | μob | σob | PRN | μob | σob |
|---|---|---|---|---|---|
| G03 | 0.262(0.009) | 1.715(0.029) | C04 | 2.899(0.003) | 1.630(0.028) |
| G04 | 0.413(0.022) | 1.199(0.026) | C05 | 0.404(0.019) | 1.715(0.033) |
| G16 | 0.539(0.012) | 1.291(0.027) | C06 | 0.193(0.004) | 1.751(0.023) |
| G22 | 0.332(0.013) | 1.397(0.025) | C07 | 0.719(0.006) | 1.893(0.019) |
| G25 | 1.643(0.009) | 2.422(0.029) | C09 | 0.570(0.007) | 1.821(0.032) |
| G26 | 0.225(0.013) | 0.699(0.018) | C10 | 0.261(0.011) | 1.892(0.028) |
| G27 | 2.095(0.034) | 1.897(0.038) | C14 | 0.384(0.002) | 2.271(0.028) |
| G29 | 0.320(0.007) | 1.663(0.034) | C16 | 1.695(0.006) | 1.910(0.025) |
| G31 | 0.348(0.007) | 0.997(0.024) | C24 | 0.614(0.026) | 1.507(0.026) |
| G32 | 0.350(0.020) | 1.294(0.024) | C25 | 1.580(0.018) | 2.679(0.034) |
| C01 | 1.610(0.006) | 1.513(0.032) | C26 | 0.428(0.011) | 1.920(0.035) |
| C02 | 1.010(0.012) | 3.267(0.027) | C33 | 0.535(0.005) | 1.786(0.031) |
| C03 | 2.405(0.011) | 1.826(0.029) | C35 | 0.719(0.022) | 2.506(0.047) |

Fig. 10
Protection level and positioning error of RTK float and fixed solutions (dataset Ⅰ)"
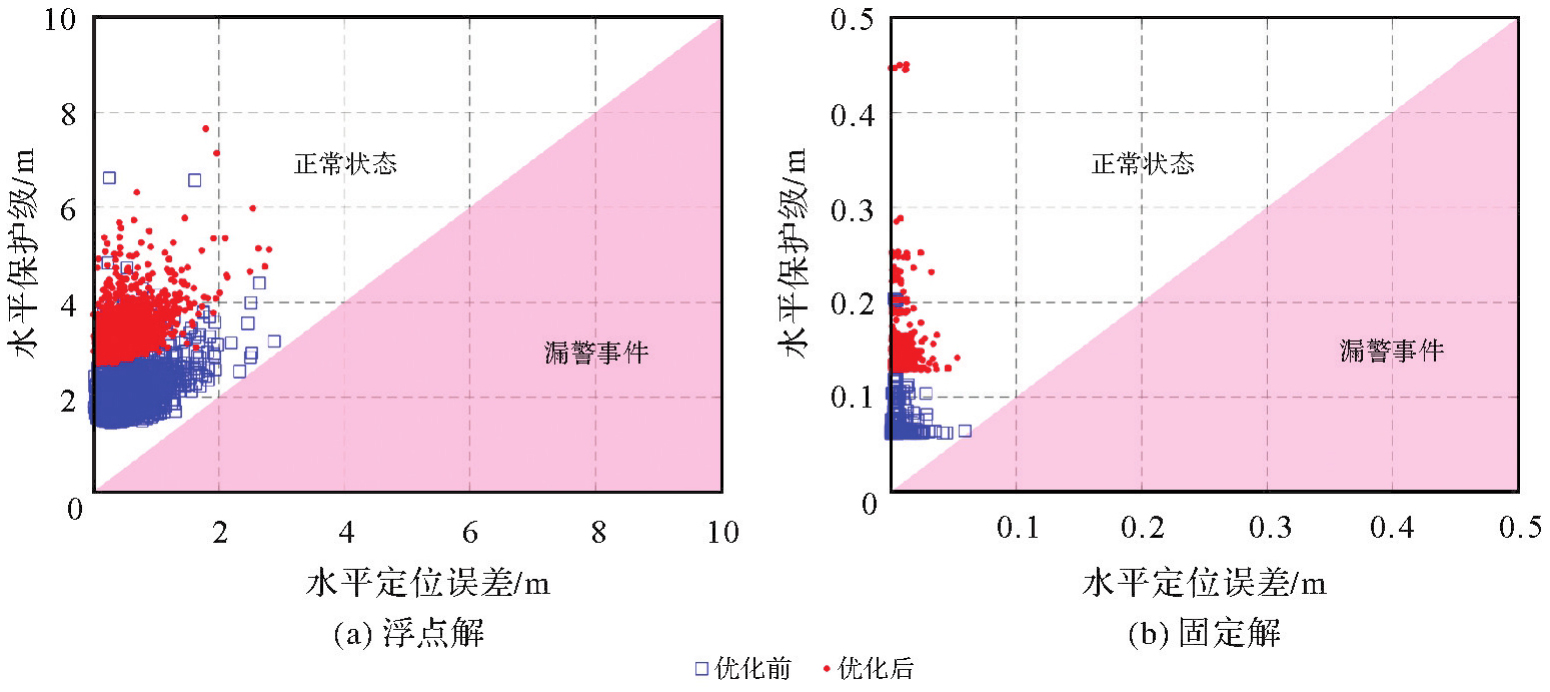

Fig. 11
Protection level and positioning error of RTK float and fixed solutions (dataset Ⅱ)"
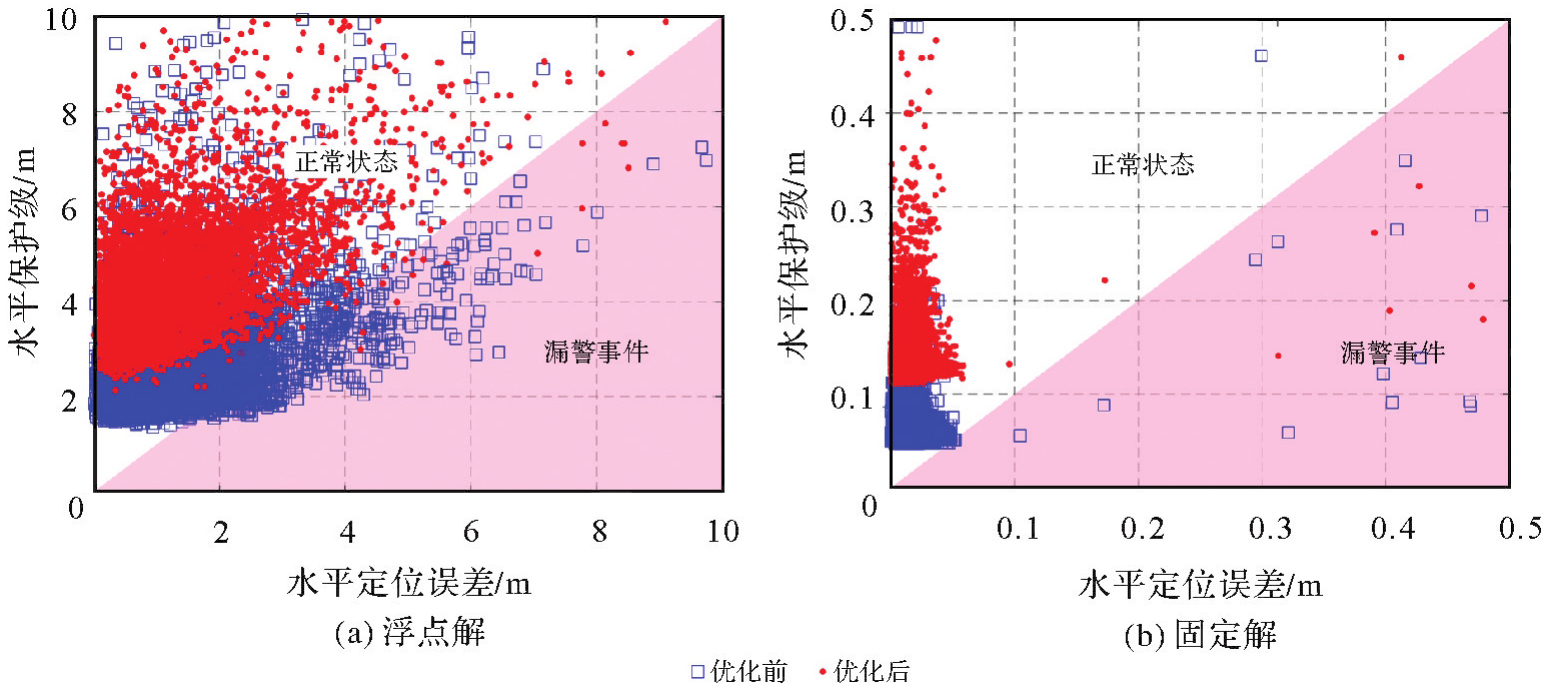
Tab. 7
Protection levels for RTK float and fixed solution"
| 轨迹 | 方案 | 浮点解 | 固定解 | ||
|---|---|---|---|---|---|
| 保护级/m | 漏警率/(%) | 保护级/m | 漏警率/(%) | ||
| 数据集Ⅰ | 优化前 | 2.880 | 0.0 | 0.077 | 0.0 |
| 优化后 | 4.186 | 0.0 | 0.166 | 0.0 | |
| 数据集Ⅱ | 优化前 | 5.221 | 8.8 | 0.096 | 1.6 |
| 优化后 | 7.273 | 0.3 | 0.218 | 1.4 | |
| [1] | 李博峰, 苗维凯, 陈广鄂. 多频多模GNSS高精度定位关键技术与挑战[J]. 武汉大学学报(信息科学版), 2023, 48(11): 1769-1783. |
| LI Bofeng, MIAO Weikai, CHEN Guang'e. Key technologies and challenges of multi-frequency and multi-GNSS high-precision positioning[J]. Geomatics and Information Science of Wuhan University, 2023, 48(11): 1769-1783. | |
| [2] | 李子申, 王宁波, 李亮, 等. 北斗高精度高可信PPP-RTK服务基本框架[J]. 导航定位与授时, 2023, 10(2): 7-15. |
| LI Zishen, WANG Ningbo, LI Liang, et al. Basic framework of BDS-based high-precision and high-credibility PPP-RTK service[J]. Navigation Positioning and Timing, 2023, 10(2): 7-15. | |
| [3] | CHEN J, ZHANG S, CAO Y, et al. A robust fault detection algorithm for the GNSS/INS integrated navigation systems[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(1): 12-24. |
| [4] | 苏先礼. GNSS完好性监测体系及辅助性能增强技术研究[D]. 上海: 上海交通大学, 2013. |
| SU Xianli. The research on GNSS integrity monitoring theory and assisted performance enhancement technique[D]. Shanghai: Shanghai Jiao Tong University, 2013. | |
| [5] | 张洁, 赵琳, 杨福鑫, 等. 面向大众导航应用的精密单点定位完好性监测方法[J]. 航空学报, 2023, 44(13): 196-206. |
| ZHANG Jie, ZHAO Lin, YANG Fuxin, et al. PPP integrity monitoring algorithm for general-purpose navigation applications[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(13): 196-206. | |
| [6] | FAN Z, ZHAO L. Autonomous integrity of multi-source information resilient fusion navigation system: state-of-the-art and open challenges[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 1-17. |
| [7] |
杨玲, 朱金成, 孙楠, 等. GNSS高级接收机自主完好性监测随机模型精化[J]. 测绘学报, 2024, 53(2): 286-295. DOI: .
doi: 10.11947/j.AGCS.2024.20210669 |
|
YANG Ling, ZHU Jincheng, SUN Nan, et al. Stochastic model refinement of GNSS advanced receiver autonomous integrity monitoring[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(2): 286-295. DOI: .
doi: 10.11947/j.AGCS.2024.20210669 |
|
| [8] | ZHANG Y, WANG L, FAN L, et al. MHSS ARAIM algorithm combined with gross error detection[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(1): 36-44. |
| [9] |
田云青, 王利, 舒宝, 等. 北斗系统ARAIM可用性评估[J]. 测绘学报, 2021, 50(7): 879-890. DOI: .
doi: 10.11947/j.AGCS.2021.20200518 |
|
TIAN Yunqing, WANG Li, SHU Bao, et al. Evaluation of the availability of BDS ARAIM[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(7): 879-890. DOI: .
doi: 10.11947/j.AGCS.2021.20200518 |
|
| [10] | IMPARATO D, EL-MOWAFY A, RIZOS C, et al. Vulnerabilities in SBAS and RTK positioning in intelligent transport systems: an overview[C]//Proceedings of 2018 International Global Navigation Satellite System Association IGNSS Symposium. Sydney: University of New South Wales, 2018: 1-17. |
| [11] | DU Y, WANG J, RIZOS C, et al. Vulnerabilities and integrity of precise point positioning for intelligent transport systems: overview and analysis[J]. Satellite Navigation, 2021(2): 1-22. |
| [12] | 千寻位置. 自动驾驶解决方案[EB/OL]. [2025-08-19]. https://www.qxwz.com/solutions/autopilot. |
| Qianxun SI. Autonomous driving solutions[EB/OL]. [2025-08-19]. https://www.qxwz.com/solutions/autopilot. | |
| [13] | 六分科技. 智能驾驶解决方案[EB/OL]. [2025-08-19]. https://www.sixents.com/productSolution/solution/intelligentDriving#div5. |
| SIXENTS TECHNOLOGY. Intelligent driving solutions[EB/OL]. [2025-08-19]. https://www.sixents.com/productSolution/solution/intelligentDriving#div5. | |
| [14] | FENG S, OCHIENG W, MOORE T, et al. Carrier phase-based integrity monitoring for high-accuracy positioning[J]. GPS Solutions, 2009, 13(1): 13-22. |
| [15] | CHANG J, REN Q, ZHAN X, et al. Integrity monitoring performance analysis for future LEO constellation augmented GNSS RTK positioning[J]. Journal of Aeronautics, Astronautics and Aviation, 2021, 53(3): 339-352. |
| [16] | WANG S, ZHAI Y, ZHAN X. Implementation of solution separation-based Kalman filter integrity monitoring against all-source faults for multi-sensor integrated navigation[J]. GPS Solutions, 2023, 27(3): 103. |
| [17] | WANG K, EL-MOWAFY A. Effect of biases in integrity monitoring for RTK positioning[J]. Advances in Space Research, 2021, 67(12): 4025-4042. |
| [18] | GAO Y, JIANG Y, GAO Y, et al. Solution separation-based integrity monitoring for RTK positioning with faulty ambiguity detection and protection level[J]. GPS Solutions, 2023, 27(3): 140. |
| [19] | ZHU N, MARAIS J, BETAILLE D, et al. GNSS position integrity in urban environments: a review of literature[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(9): 2762-2778. |
| [20] | HASSAN T, EL-MOWAFY A, WANG K. A review of system integration and current integrity monitoring methods for positioning in intelligent transport systems[J]. IET Intelligent Transport Systems, 2021, 15(1): 43-60. |
| [21] | EL-MOWAFY A. On detection of observation faults in the observation and position domains for positioning of intelligent transport systems[J]. Journal of Geodesy, 2019, 93(10): 2109-2122. |
| [22] | TAKASU T, YASUDA A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB[C]//Proceedings of 2009 International Symposium on GPS/GNSS. Jeju: ICC, 2009: 1-6. |
| [23] | LI L, WANG H, JIA C, et al. Integrity and continuity allocation for the RAIM with multiple constellations[J]. GPS Solutions, 2017, 21(4): 1503-1513. |
| [24] | BLANCH J, WALKER T, ENGE P, et al. Baseline advanced RAIM user algorithm and possible improvements[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(1): 713-732. |
| [25] | JING H, GAO Y, SHAHBEIGI S, et al. Integrity monitoring of GNSS/INS based positioning systems for autonomous vehicles: state-of-the-art and open challenges[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 14166-14187. |
| [26] | ZHANG W, WANG J, EL-MOWAFY A, et al. Integrity monitoring scheme for undifferenced and uncombined multi-frequency multi-constellation PPP-RTK[J]. GPS Solutions, 2023, 27(2): 68. |
| [27] |
符运日, 杨玲, 沈云中, 等. 对流层延迟模型的残差包络建模[J]. 测绘学报, 2023, 52(6): 895-903. DOI: .
doi: 10.11947/j.AGCS.2023.20220231 |
|
FU Yunri, YANG Ling, SHEN Yunzhong, et al. Residuals overbounding modeling of the tropospheric delay models[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(6): 895-903. DOI: .
doi: 10.11947/j.AGCS.2023.20220231 |
|
| [28] | DECLEENE B. Defining pseudorange integrity-overbounding[C]//Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation. Alexandria: ION, 2000: 1916-1924. |
| [29] | RIFE J, PULLEN S, ENGE P, et al. Paired overbounding for nonideal LAAS and WAAS error distributions[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(4): 1386-1395. |
| [30] | BLANCH J, WALTER T, ENGE P. Gaussian bounds of sample distributions for integrity analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 55(4): 1806-1815. |
| [31] | ZHU F. SmartPNT-POS: raw GNSS and INS measurements for research[EB/OL]. [2025-06-12]. https://www.kaggle.com/datasets/fengzhusgg/smartpnt-pos. |
| [32] | LI X X, HUANG J D, LI X, et al. GREAT: a scientific software platform for satellite geodesy and multi-source fusion navigation[J]. Advances in Space Research, 2024, 74(4): 1751-1769. |
| [33] | TANIL C, KHANAFSEH S, JOERGER M, et al. Optimal INS/GNSS coupling for autonomous car positioning integrity[C]//Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation. Manassas: ION, 2019: 3123-3140. |
| [1] | Deying YU, Houpu LI, Yi LIU, Shuguang WU, Deyan LI, Mingchao LI, Wenkui LI, Shaofeng BIAN. A DBSCAN-based RAIM algorithm for multiple gross error identification [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(1): 59-72. |
| [2] | Liang LI, Liuqi WANG, Ningbo WANG, Min LI, Zishen LI, Fengze DU, Shuai PANG, Zhibo NA. Vectorized integrity monitoring method for PPP-RTK correction products [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(9): 1777-1789. |
| [3] | YANG Ling, ZHU Jincheng, SUN Nan, YU Yangkang, SHEN Yunzhong, LI Bofeng. Stochastic model refinement of GNSS advanced receiver autonomous integrity monitoring [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(2): 286-295. |
| [4] | MA Yuexin, TANG Chengpan, HU Xiaogong, CHANG Zhiqiao, PU Junyu, XING Nan, CAO Yueling, WANG Ningbo. Optimization of GIVE algorithm for grid-based single shell ionospheric model over Chinese region based on residual statistics [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(3): 304-314. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||