

Acta Geodaetica et Cartographica Sinica ›› 2025, Vol. 54 ›› Issue (10): 1812-1825.doi: 10.11947/j.AGCS.2025.20250266
• Geodesy and Navigation • Previous Articles Next Articles
Kefan SHAO1( ), Zengke LI1(), Meng SUN1, Zhenbin LIU2, Qi WU1
), Zengke LI1(), Meng SUN1, Zhenbin LIU2, Qi WU1
Received:2025-07-14
Revised:2025-09-15
Online:2025-11-14
Published:2025-11-14
Contact:
Zengke LI
E-mail:kefanshao@cumt.edu.cn;zengkeli@yeah.net
About author:SHAO Kefan (1998—), male, PhD candidate, majors in multi-sensor fusion and indoor emergency positioning. E-mail: kefanshao@cumt.edu.cn
Supported by:CLC Number:
Kefan SHAO, Zengke LI, Meng SUN, Zhenbin LIU, Qi WU. A geomagnetic SLAM method enhanced by multi-source data fusion based on smartphones[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1812-1825.
Tab. 1
Comparison of different SLAM schemes"
| 使用设备 | 不同SLAM方案 | 定位范围 | 状态估计方法 |
|---|---|---|---|
| 足部IMU | 惯性SLAM[ | 28 m×20 m | RBPF |
| 智能手机 | 语义SLAM与机会相遇信号[ | 3000 m2 | 粒子滤波与EKF |
| 智能手机 | 视觉惯性里程计辅助的地磁SLAM[ | 40 m×50 m | RBPF |
| 足部IMU | 地磁SLAM[ | 15 m×20 m | EKF |
| 智能手机 | 惯性SLAM与地磁SLAM[ | 20 m×40 m | RBPF |
| 智能手机 | 地磁SLAM与视觉SLAM[ | 10 m×12 m | 位姿图优化 |
| 智能平板 | 视觉惯性里程计辅助的地磁SLAM[ | 15 m×20 m | EKF |
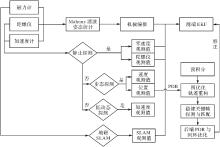
Fig. 1
Flowchart of the improved geomagnetic SLAM algorithm"

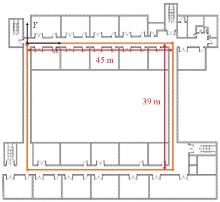
Fig. 2
Planar of experimental scene"


Fig. 3
Different indoor scenes"

Tab. 2
Comparison of positioning errors using different methods"
| 手机型号 | 指标 | 方法1 | 方法2 | 方法3 | 方法4 | 方法5 | 方法6 | 方法7 | 方法8 | 方法9 | 方法10 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 小米8 | RMSE | 6.83 | 8.49 | 7.11 | 7.13 | 6.95 | 6.95 | 8.82 | 13.62 | 5.38 | 3.45 |
| MAXE | 13.62 | 16.76 | 14.17 | 14.20 | 15.74 | 14.16 | 20.49 | 31.64 | 11.14 | 7.20 | |
| MEANE | 5.96 | 7.42 | 6.22 | 6.24 | 6.01 | 6.05 | 7.20 | 11.36 | 4.62 | 3.09 | |
| 红米K30 | RMSE | 6.88 | 6.73 | 6.87 | 6.88 | 6.29 | 6.08 | 6.19 | 7.41 | 10.47 | 3.74 |
| MAXE | 13.23 | 13.09 | 13.17 | 13.19 | 12.24 | 12.01 | 11.66 | 16.84 | 21.83 | 7.04 | |
| MEANE | 6.08 | 5.85 | 6.08 | 6.09 | 5.57 | 5.31 | 5.37 | 6.33 | 8.89 | 3.35 |
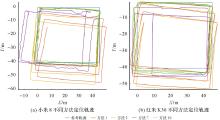
Fig. 4
Localization trajectories of volunteer A using different smartphones and methods"

Tab. 3
Comparison of positioning errors using different methods"
| 手机型号 | 指标 | 方法1 | 方法2 | 方法6 | 方法10 |
|---|---|---|---|---|---|
| 小米8 | RMSE | 3.58 | 3.54 | 3.87 | 2.87 |
| MAXE | 8.11 | 6.93 | 6.61 | 4.91 | |
| MEANE | 3.10 | 3.26 | 3.51 | 2.65 | |
| 红米K30 | RMSE | 3.26 | 3.12 | 2.95 | 2.07 |
| MAXE | 5.84 | 6.41 | 6.15 | 6.66 | |
| MEANE | 2.91 | 2.79 | 2.36 | 1.62 |
Tab. 4
Comparison of positioning errors using different loop methods"
| 方法 | RMSE | MAXE | MEANE |
|---|---|---|---|
| 8 | 3.10 | 5.67 | 2.80 |
| 10 | 2.87 | 4.91 | 2.65 |
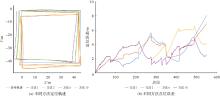
Fig. 5
Trajectories and point positioning errors of different methods when using Xiaomi 8"


Fig. 6
Trajectories of different loop methods"

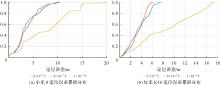
Fig. 7
Cumulative distribution of positioning errors for method 10 with different phones and parameter settings"

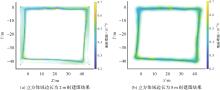
Fig. 8
Geomagnetic SLAM mapping results with different voxel grid side lengths"


Fig. 9
Geomagnetic error map of reference trajectory and CDF plot of geomagnetic magnitude estimation error"

| [1] | WANG Liang, LI Zishen, WANG Ningbo, et al. Real-time GNSS precise point positioning for low-cost smart devices[J]. GPS Solutions, 2021, 25(2): 69. |
| [2] | 祝会忠, 孙沐凡, 李军. 灾害环境下低成本终端BDS高精度应急定位方法[J]. 武汉大学学报(信息科学版), 2025, 50(6): 1054-1064. |
| ZHU Huizhong, SUN Mufan, LI Jun. High-precision emergency positioning method for low-cost terminal BDS in disaster environments[J]. Geomatics and Information Science of Wuhan University, 2025, 50(6): 1054-1064. | |
| [3] | LIU Ao, WANG Wenguang, LI Yiming. MSPos: a geomagnetic matching suitability-incorporated positioning method in indoor environments[J]. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 9507815. |
| [4] |
陈锐志, 陈亮. 基于智能手机的室内定位技术的发展现状和挑战[J]. 测绘学报, 2017, 46(10): 1316-1326. DOI: .
doi: 10.11947/j.AGCS.2017.20170383 |
|
CHEN Ruizhi, CHEN Liang. Indoor positioning with smartphones: the state-of-the-art and the challenges[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1316-1326. DOI: .
doi: 10.11947/j.AGCS.2017.20170383 |
|
| [5] | LI You, HE Zhe, GAO Zhouzheng, et al. Toward robust crowdsourcing-based localization: a fingerprinting accuracy indicator enhanced wireless/magnetic/inertial integration approach[J]. IEEE Internet of Things Journal, 2019, 6(2): 3585-3600. |
| [6] | KUANG Jian, NIU Xiaoji, CHEN Xingeng. Robust pedestrian dead reckoning based on MEMS-IMU for smartphones[J]. Sensors, 2018, 18(5): 1391. |
| [7] | CHEN Changhao, LU Xiaoxuan, MARKHAM A, et al. IONet: learning to cure the curse of drift in inertial odometry[C]//Proceedings of the 32nd AAAI Conference on Artificial Intelligence. California: AAAI Press, 2018: 6468-6476. |
| [8] | HERATH S, YAN Hang, FURUKAWA Y. RoNIN: robust neural inertial navigation in the wild: benchmark, evaluations, & new methods[C]//Proceedings of 2020 IEEE International Conference on Robotics and Automation. New Jersey: IEEE, 2020: 3146-3152. |
| [9] | LIU Wenxin, CARUSOD , ILG E, et al. TLIO: tight learned inertial odometry[J]. IEEE Robotics and Automation Letters, 2020, 5(4): 5653-5660. |
| [10] | ANGERMANNM , ROBERTSON P. FootSLAM: pedestrian simultaneous localization and mapping without exteroceptive sensors: hitchhiking on human perception and cognition[J]. Proceedings of the IEEE, 2012, 100: 1840-1848. |
| [11] | SHOKRY A, ELHAMSHARY M, YOUSSEF M. DynamicSLAM: leveraging human anchors for ubiquitous low-overhead indoor localization[J]. IEEE Transactions on Mobile Computing, 2021, 20(8): 2563-2575. |
| [12] | 李泰宇, 旷俭, 牛小骥. 基于磁强计阵列的室内行人定位算法研究[J]. 传感技术学报, 2020, 33(10): 1425-1431. |
| LI Taiyu, KUANG Jian, NIU Xiaoji. Research on indoor pedestrian location algorithm based on magnetometer array[J]. Chinese Journal of Sensors and Actuators, 2020, 33(10): 1425-1431. | |
| [13] | KOK M, SOLIN A. Scalable magnetic field SLAM in 3D using Gaussian process maps[C]//Proceedings of the 21st International Conference on Information Fusion. New Jersey: IEEE, 2018: 1353-1360. |
| [14] | VISET F, HELMONS R, KOK M. An extended Kalman filter for magnetic field SLAM using Gaussian process regression[J]. Sensors, 2022, 22(8): 2833. |
| [15] | CUI Yan, XIONG Zhi, LI Xiaodong, et al. A pedestrian SLAM scheme grounded in inertial-based map and magnetic field map[J]. IEEE Sensors Journal, 2024, 24(5): 6500-6514. |
| [16] | HANLEY D, DE OLIVEIRA A S D, ZHANG Xiangyuan, et al. The impact of height on indoor positioning with magnetic fields[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 8501719. |
| [17] | 乔治. 视距-磁场SLAM融合技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2021. |
| QIAO Zhi. Research on visual-magnetic field SLAM fusion technology[D]. Harbin: Harbin Institute of Technology, 2021. | |
| [18] | KOK M, SOLIN A. Online one-dimensional magnetic field SLAM with loop-closure detection[C]//Proceedings of 2024 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI). New Jersey: IEEE, 2024: 1-7. |
| [19] | 张小红, 张元泰, 朱锋. 城市复杂场景下GNSS定位的因子图优化方法及其抗差性能分析[J]. 武汉大学学报(信息科学版), 2023, 48(7): 1050-1057. |
| ZHANG Xiaohong, ZHANG Yuantai, ZHU Feng. Factor graph optimization for urban environment GNSS positioning and robust performance analysis[J]. Geomatics and Information Science of Wuhan University, 2023, 48(7): 1050-1057. | |
| [20] | LIAO Wei, SHANG Junna, LI Zehua, et al. A PDR and magnetic fingerprint fusion positioning based on local covariance constrained multi-objective optimization[J]. Measurement, 2025, 253: 117557. |
| [21] |
蔺小虎, 杨鑫, 姚顽强, 等. 面向复杂地下空间的多源传感器数据动态加权融合SLAM方法[J]. 测绘学报, 2025, 54(3): 523-535. DOI: .
doi: 10.11947/j.AGCS.2025.20230586 |
|
LIN Xiaohu, YANG Xin, YAO Wanqiang, et al. A dynamic weighted fusion SLAM method using multi-source sensor data in complex underground spaces[J]. Acta Geodaetica et Cartographica Sinica: 2025, 54(3): 523-535. DOI: .
doi: 10.11947/j.AGCS.2025.20230586 |
|
| [22] | 马杰, 王雯, 邓辰龙, 等. 动态观测权调整的GNSS/INS抗差因子图优化算法[J/OL]. 武汉大学学报(信息科学版), [2025-04-30]. https://link.cnki.net/doi/10.13203/j.whugis20240493. |
| MA Jie, WANG Wen, DENG Chenlong, et al. A robust factor graph optimization algorithm with dynamic observation weight adjusting[J/OL]. Geomatics and Information Science of Wuhan University, [2025-04-30]. https://link.cnki.net/doi/10.13203/j.whugis20240493. | |
| [23] |
陈锐志, 郭光毅, 叶锋, 等. 智能手机音频信号与MEMS传感器的紧耦合室内定位方法[J]. 测绘学报, 2021, 50(2): 143-152. DOI: .
doi: 10.11947/j.AGCS.2021.20200551 |
|
CHEN Ruizhi, GUO Guangyi, YE Feng, et al. Tightly-coupled integration of acoustic signal and MEMS sensors on smartphones for indoor positioning[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(2): 143-152. DOI: .
doi: 10.11947/j.AGCS.2021.20200551 |
|
| [24] | WAHLSTROM N, KOK M, SCHON T B, et al. Modeling magnetic fields using Gaussian processes[C]//Proceedings of 2013 IEEE International Conference on Acoustics, Speech and Signal Processing. Vancouver: IEEE, 2013: 3522-3526. |
| [25] | SOLIN A, SÄRKKÄ S. Hilbert space methods for reduced-rank Gaussian process regression[J]. Statistics and Computing, 2020, 30(2): 419-446. |
| [26] | MAHONY R, HAMEL T, PFLIMLIN J M. Complementary filter design on the special orthogonal groupS0(3)[C]//Proceedings of the 44th IEEE Conference on Decision Control/European Control Conference (CCD-ECC). New Jersey: IEEE, 2005: 1477-1484. |
| [27] | SKOG I, HANDEL P, NILSSON J O, et al. Zero-velocity detection-an algorithm evaluation[J]. IEEE Transactions on Biomedical Engineering, 2010, 57(11): 2657-2666. |
| [28] | SHAO Kefan, LI Zengke, WANG Zhaoyuan, et al. Magnetic matching/PDR combined positioning method under the constraint of error ellipse[C]//Proceedings of the 13th China Satellite Navigation Conference. Singapore: Springer, 2022: 352-362. |
| [29] | GUTIÉRREZ J D, JIMÉNEZ A R, SECO F, et al. GetSensorData: an extensible Android-based application for multi-sensor data registration[J]. SoftwareX, 2022, 19: 101186. |
| [30] | SHU Mingcong, CHEN Guoliang, ZHANG Zhenghua, et al. Indoor geomagnetic positioning using direction-aware multiscale recurrent neural networks[J]. IEEE Sensors Journal, 2023, 23(3): 3321-3333. |
| [1] | ZHANG Liangpei, HE Jiang, YANG Qianqian, XIAO Yi, YUAN Qiangqiang. Data-driven multi-source remote sensing data fusion: progress and challenges [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(7): 1317-1337. |
| [2] | ZHANG Xiaohong, ZHOU Yuhui, ZHU Feng, HU Haojie. A new vehicle motion constraint model with parameter autonomous learning and analysis on inertial drift error suppression [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(7): 1249-1258. |
| [3] | CHEN Ruizhi, QIAN Long, NIU Xiaoguang, XU Shihao, CHEN Liang, QIU Chao. Fusing acoustic ranges and inertial sensors using a data and model dual-driven approach [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(7): 1160-1171. |
| [4] | CHEN Ruizhi, GUO Guangyi, YE Feng, QIAN Long, XU Shihao, LI Zheng. Tightly-coupled integration of acoustic signal and MEMS sensors on smartphones for indoor positioning [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(2): 143-152. |
| [5] | ZHUANG Hanyang, WANG Xiaoliang, WANG Chunxiang, YANG Ming. Vehicle tracking enhancement based on the lane orientation priori from digital maps [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1522-1533. |
| [6] | . Satellite Orbit Determination Algorithm Based on UKF-EKF [J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(5): 446-451. |
| [7] | . Precise Point Positioning (PPP) Algorithm Based on GPS Dual-frequency Raw Observations and Its Application [J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(5): 478-483. |
| [8] | . Integrated Localization Algorithm for DGPS/DR Based on SUT-EKF [J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(5): 528-533. |
| [9] | WANG Zhi-Gang 1,Shaofeng Bian2. Local Gravity Field Model Based Underwater Gravity Aided Inertial Navigation [J]. Acta Geodaetica et Cartographica Sinica, 2009, 38(5): 0-414. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||