


测绘学报 ›› 2025, Vol. 54 ›› Issue (4): 688-701.doi: 10.11947/j.AGCS.2025.20240359
贾鑫1,2( ), 朱庆1,3(), 葛旭明3, 马瑞峰4, 胡翰3
), 朱庆1,3(), 葛旭明3, 马瑞峰4, 胡翰3
收稿日期:2024-08-31
出版日期:2025-05-30
发布日期:2025-05-30
通讯作者:
朱庆
E-mail:jiaxin1246782373@163.com;zhuqing@swjtu.edu.cn
作者简介:贾鑫(1995—),男,博士生,研究方向为车载LiDAR点云三维建模。 E-mail:jiaxin1246782373@163.com
基金资助:
Xin JIA1,2(), Qing ZHU1,3(), Xuming GE3, Ruifeng MA4, Han HU3
Received:2024-08-31
Online:2025-05-30
Published:2025-05-30
Contact:
Qing ZHU
E-mail:jiaxin1246782373@163.com;zhuqing@swjtu.edu.cn
About author:JIA Xin (1995—), male, PhD candidate, majors in MLS point cloud 3D reconstruction. E-mail: jiaxin1246782373@163.com
Supported by:摘要:
护栏是公路设施的重要组成部分,若其形态发生变形将严重影响其防护功能。已有的护栏形变检测方法主要是从移动测量点云中提取护栏并建模,未对护栏进行更进一步的语义特征挖掘,且在逆向建模中没有真实反映出护栏的形变状况。为此,本文提出以车载激光点云驱动和建筑信息模型引导的高精度护栏参数化建模框架。①从移动激光扫描(MLS)数据中自动化提取和实例化护栏元素;②通过随机抽样一致(RANSAC)方法求解护栏类型的结构参数;③引入B样条曲线护栏参数化,通过Dynamo模块化建模创建真实的护栏模型,并通过曲率法向量约束的轨迹检测机制评估护栏形变里程。该方法提高了护栏构件级模型的精度,为不同护栏类型的养护检查提供安全、高效的解决方案。试验结果表明,该方法在高速公路护栏自动识别中达到98.7%的识别准确率。对选定路段的所有变形护栏进行检测,定位误差小于2.2 m,满足实际检测要求,减轻了因护栏变形带来的交通安全风险。
中图分类号:
贾鑫, 朱庆, 葛旭明, 马瑞峰, 胡翰. 车载LiDAR点云驱动的高速公路护栏参数化建模及变形段识别[J]. 测绘学报, 2025, 54(4): 688-701.
Xin JIA, Qing ZHU, Xuming GE, Ruifeng MA, Han HU. Parametric modeling and deformation identification of highway guardrail driven by MLS point clouds[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(4): 688-701.

图1
技术路线"
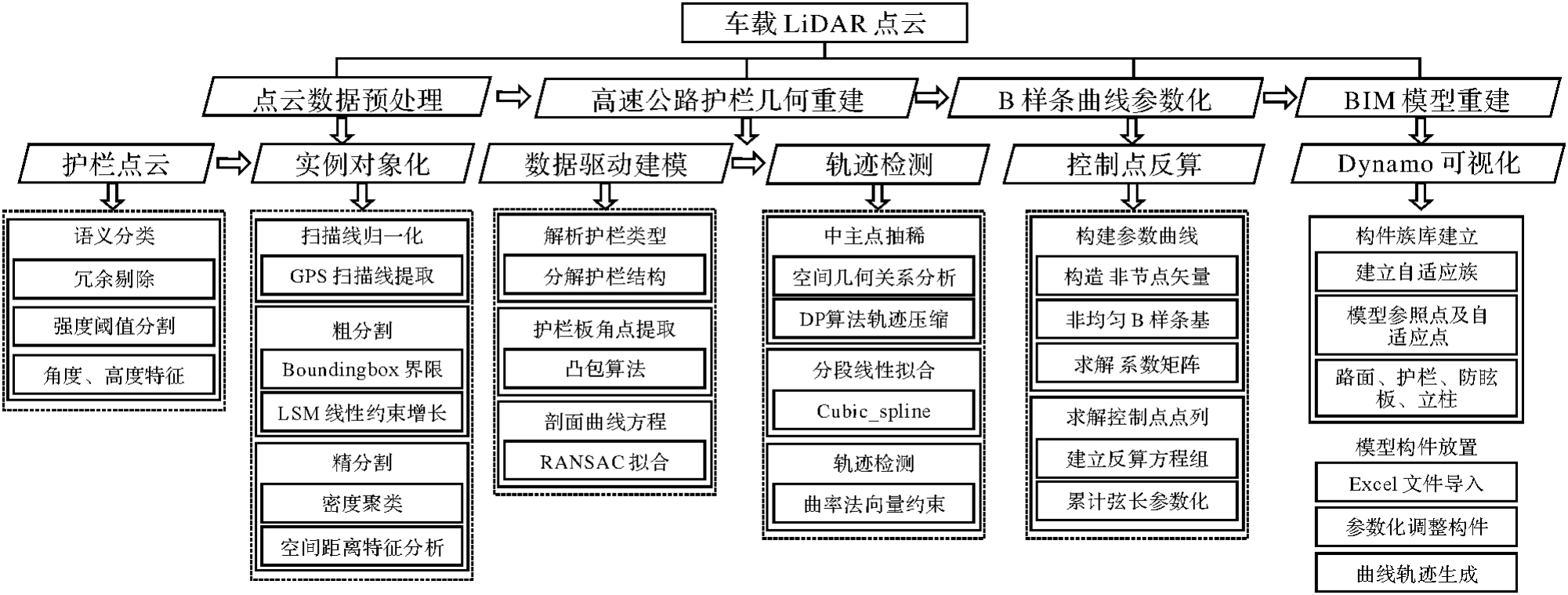
图2
高速公路点云护栏实例化预处理流程"


图3
4种高速公路护栏"
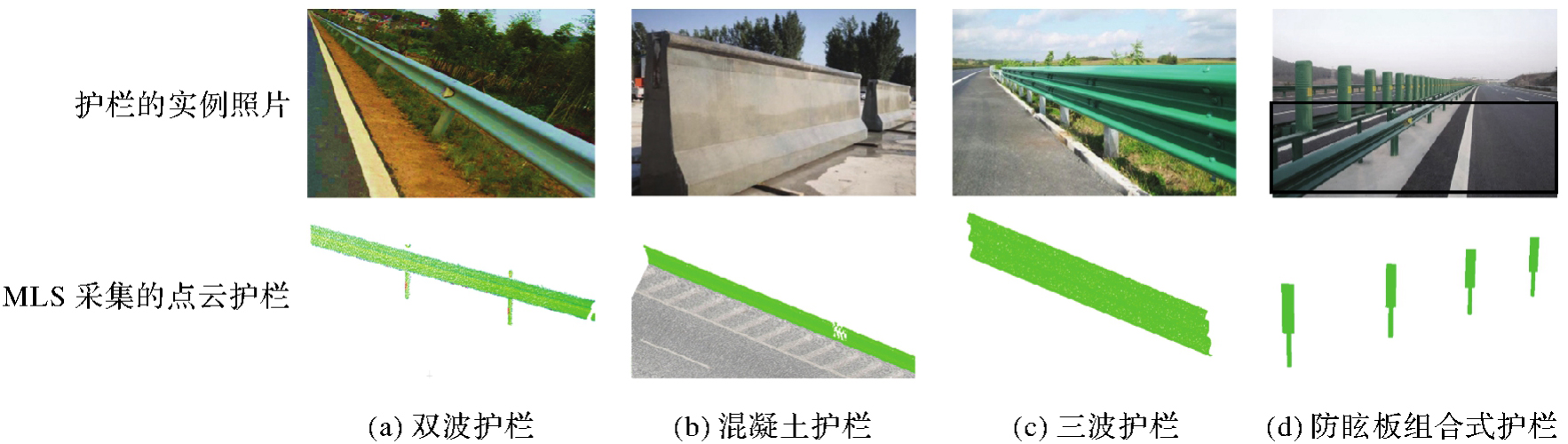
图4
护栏点云剖面注:r为圆弧半径;h为剖面高度;l为剖面长度。"
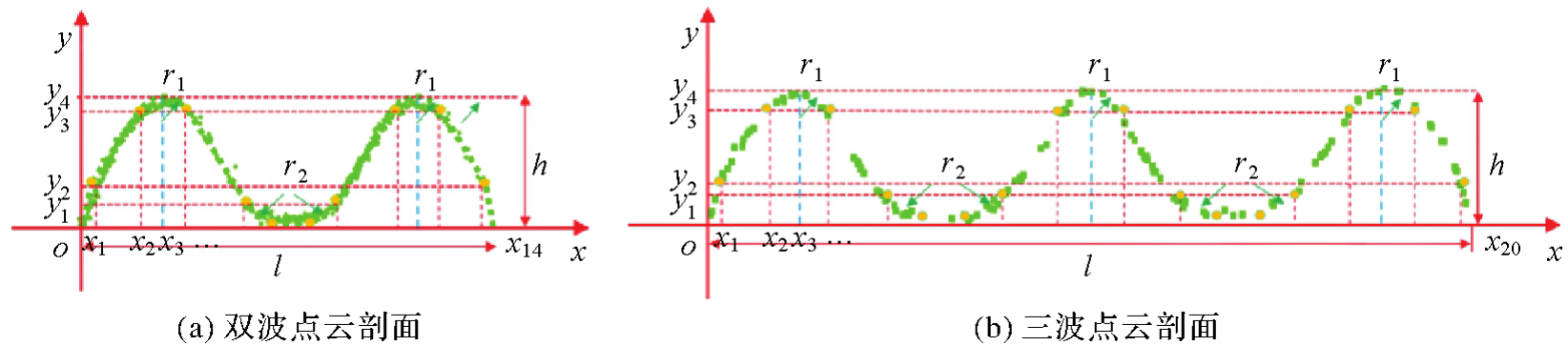

图5
波状护栏剖面曲线拟合"
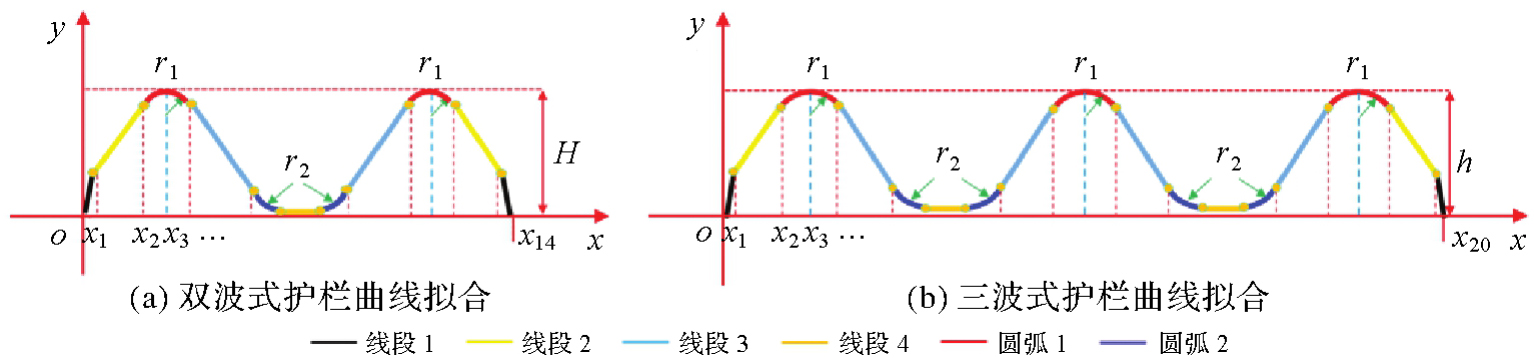

图6
护栏布设示例"
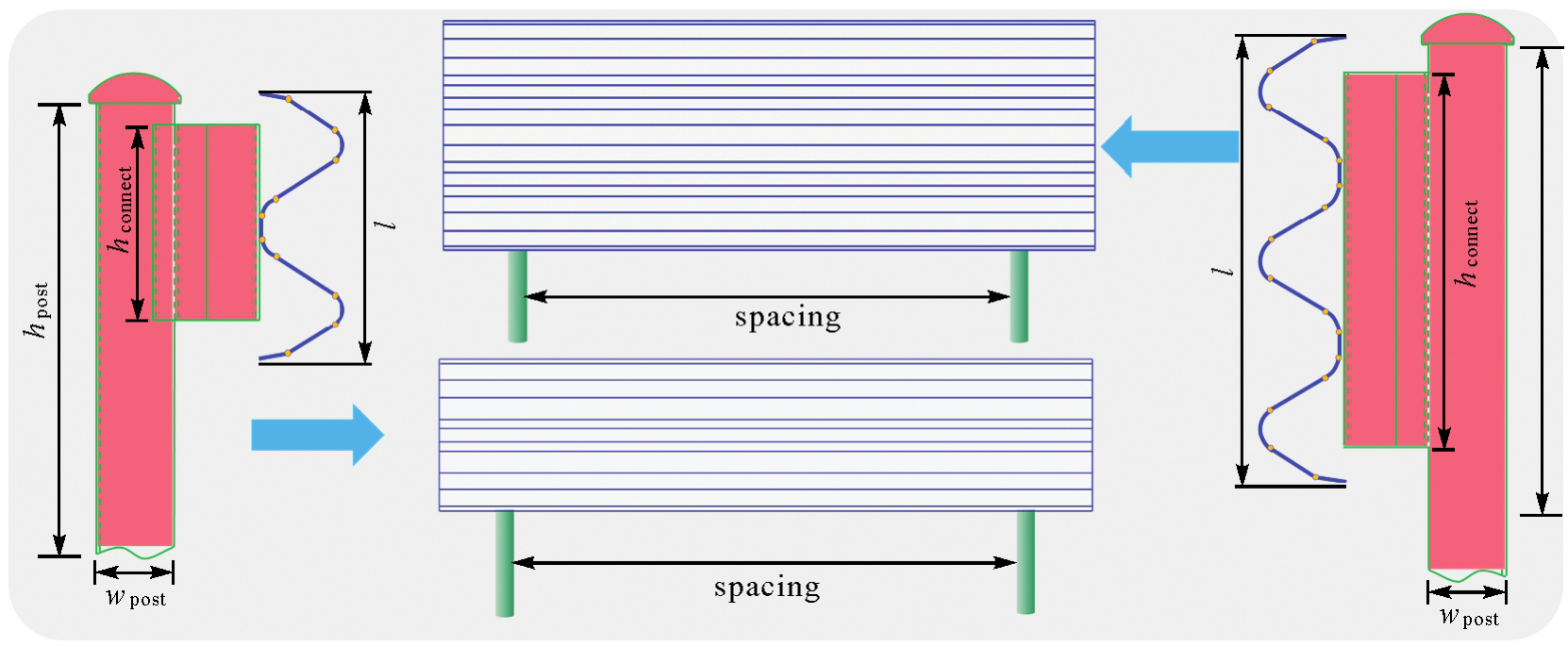
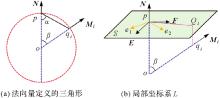
图7
变量的几何关系"
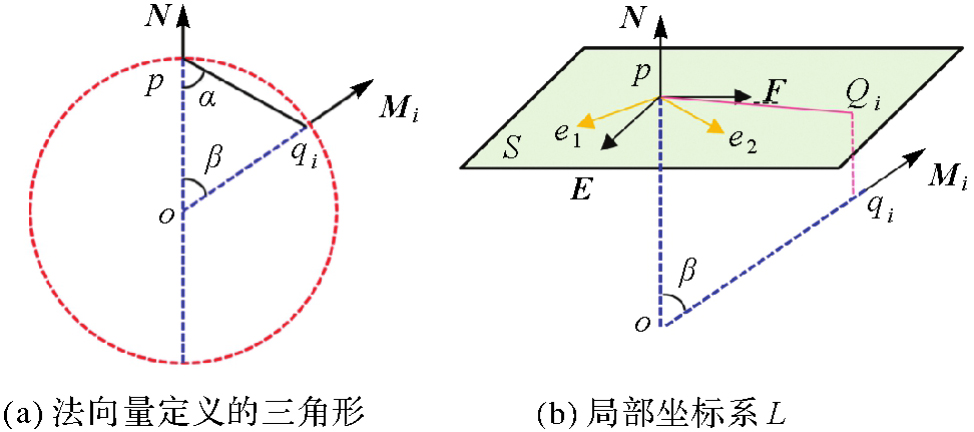
图8
不同护栏轨迹曲率对比"

图9
轨迹曲线参数化"

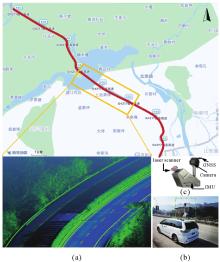
图10
荣昌高速公路试验区"

表1
DBSCAN方法与本文方法的比较"
| 方法 | 聚类数量 | |
|---|---|---|
| 直线段 | 弯道 | |
| DBSCAN | 6 | 9 |
| 本文方法 | 3 | 3 |
| 真实值 | 3 | 3 |
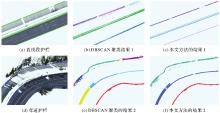
图11
直线和弯道护栏实例化提取"
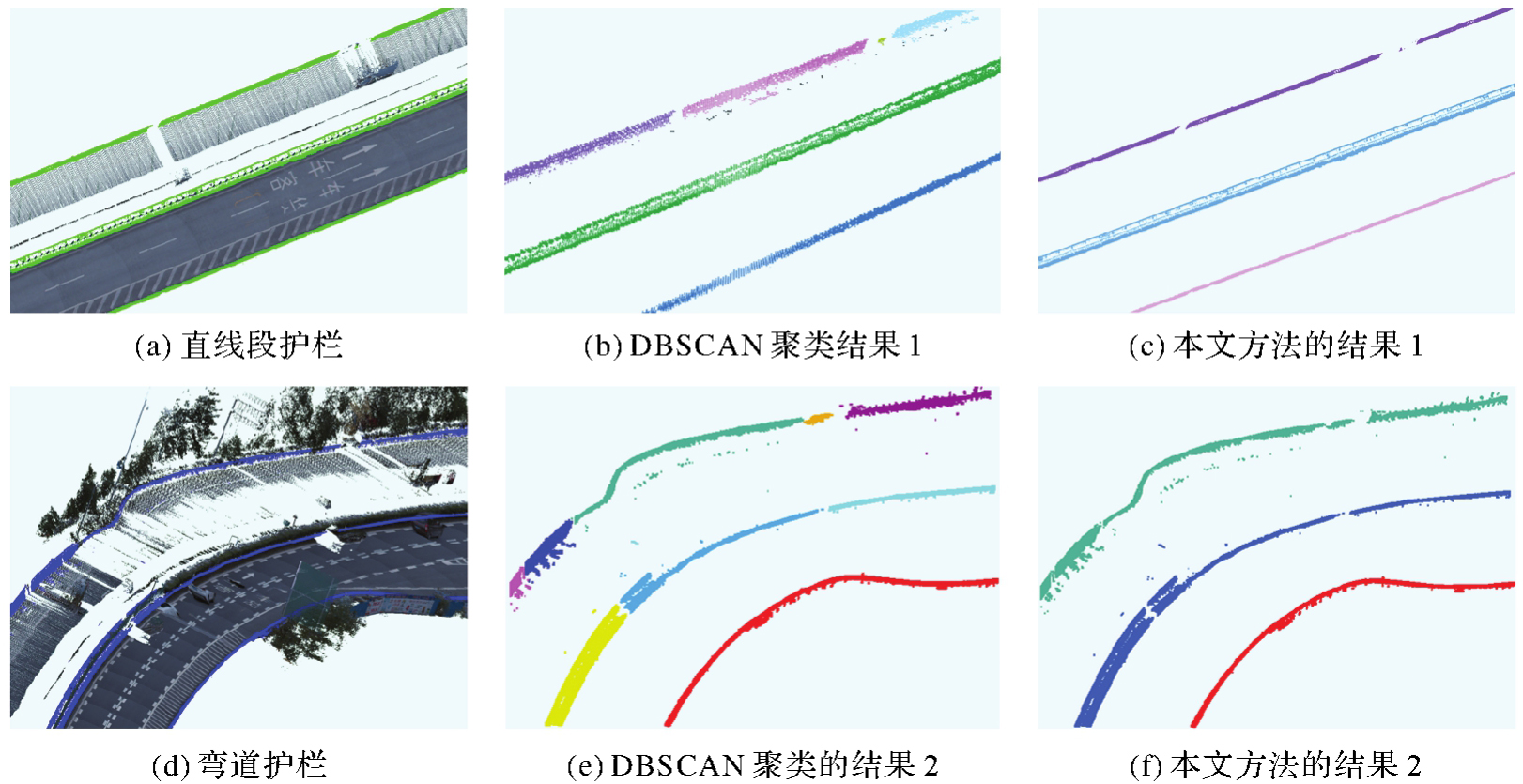
表2
护栏分割精度定量评价"
| 试验段 | 真正例和假负例 | 真正例和假正例 | 真正例 | 精确率/(%) | 召回率/(%) |
|---|---|---|---|---|---|
| 直线 | 302 869 | 302 258 | 299 235 | 99.0 | 98.8 |
| 弯道 | 370 246 | 369 492 | 363 211 | 98.4 | 98.1 |

图12
Dynamo可视化编程机制"
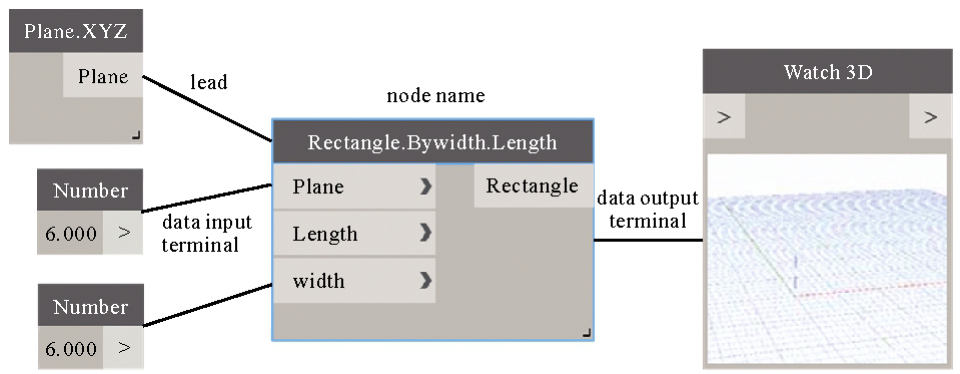
图13
BIM建模构件族"
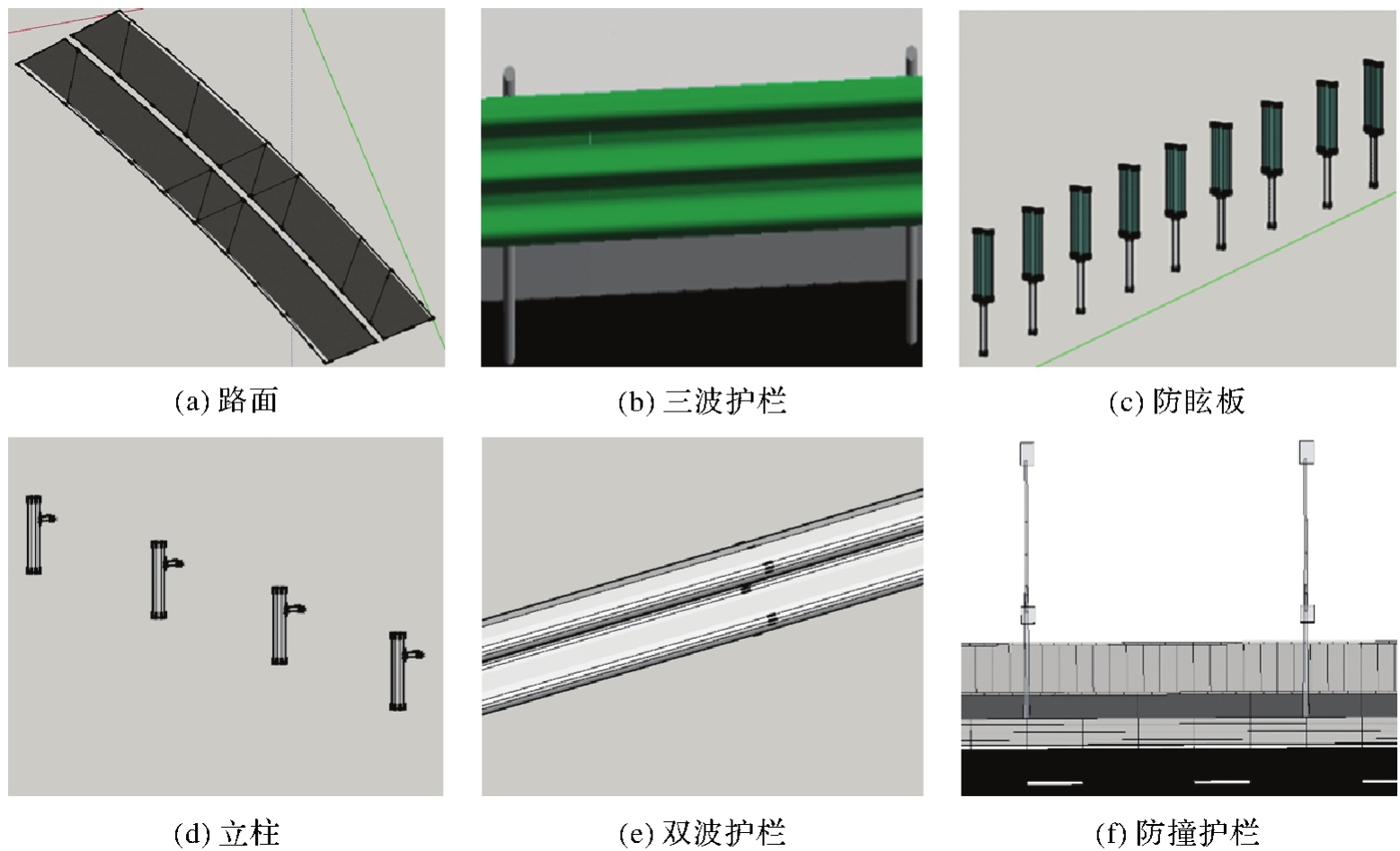

图14
护栏建模流程"
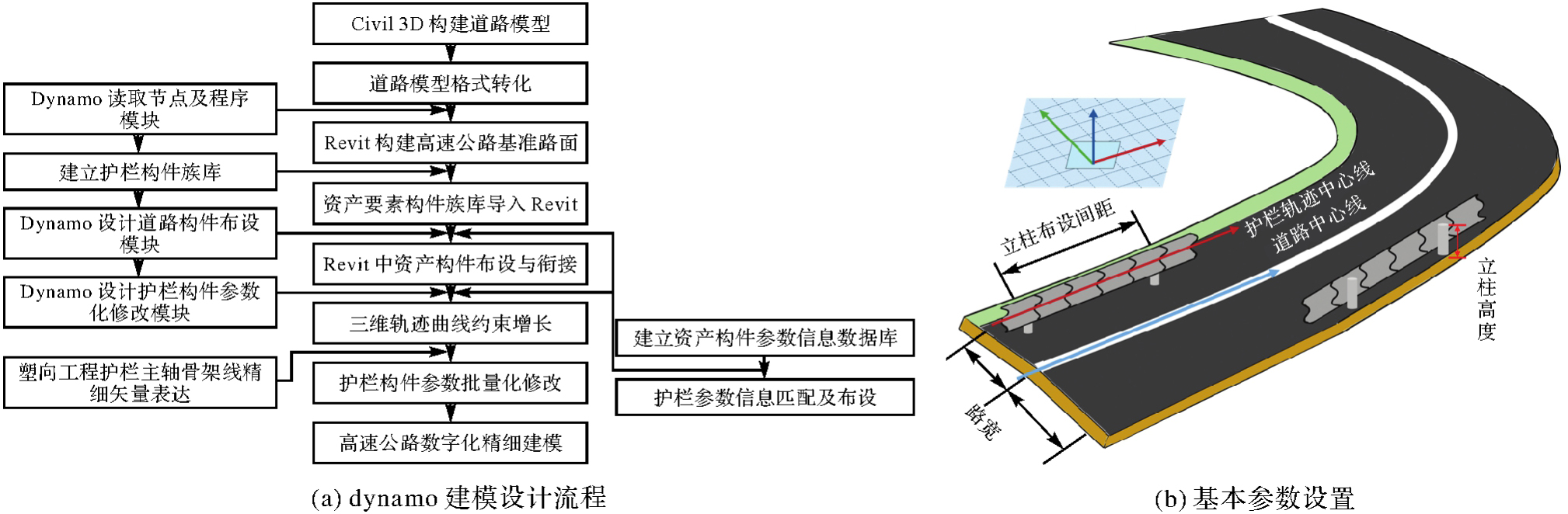
表3
不同类型的参数"
| 类型 | 已知参数 | 未知参数 |
|---|---|---|
| dual-wave | H,L,r1,r2,r3,x2,x3,…,x14 | Length,R,Positiondual |
| three-wave | H,L,r1,r2,r3,r4,r5,x2,x3,…,x20 | Length,R,Positionthree |
| pillar | wpost,hpost | Spacingpillar,Positionpillar,offset,R |
| anti-dazzle board | Rectangle,Cylinder | Spacingboard,Positionboard,offset,R |
| concrete barriers | trapezoid | Length,Positionbarriers |

图15
护栏BIM模型"

图16
变形护栏参数化BIM模型"
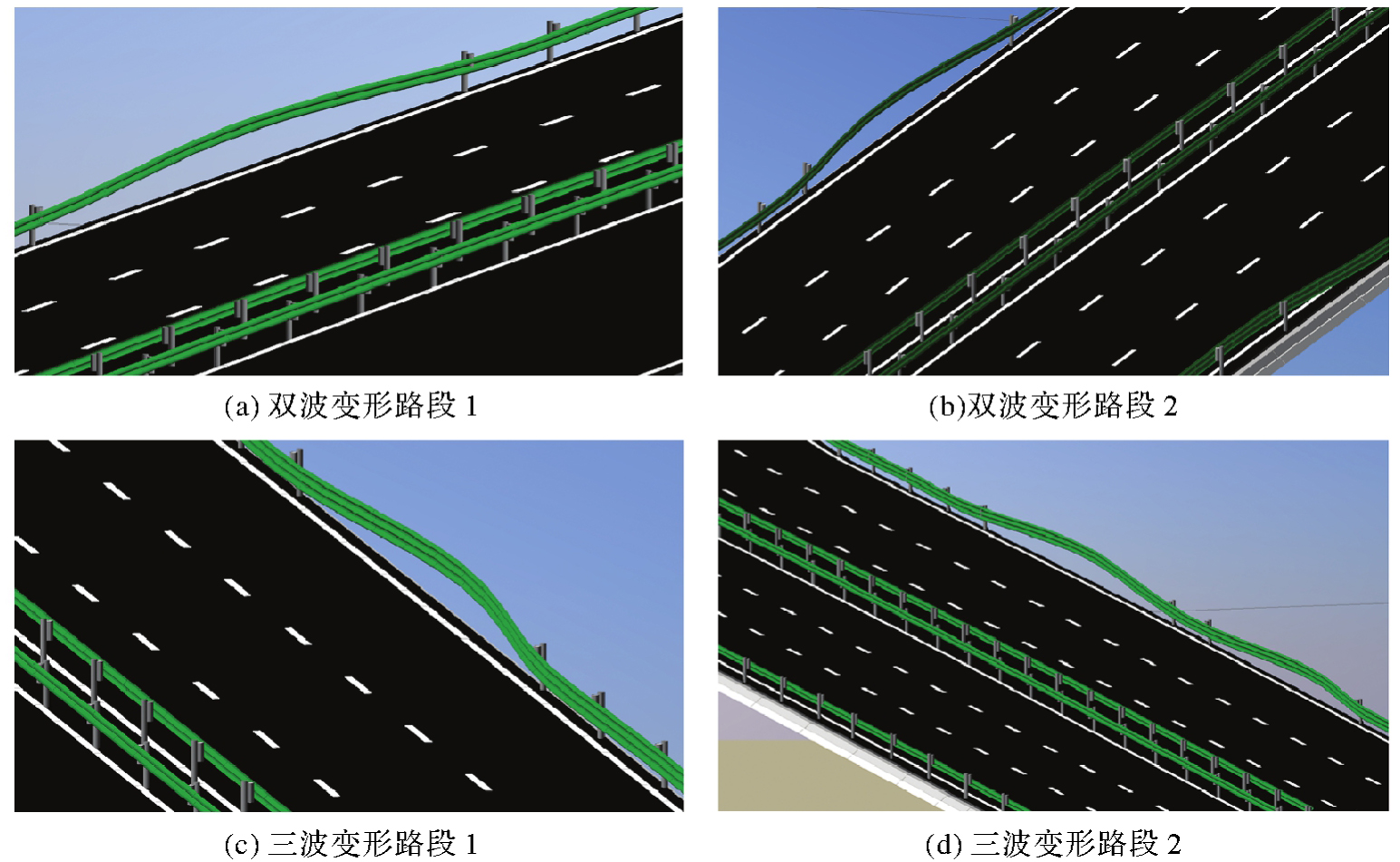
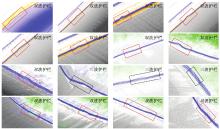
图17
变形护栏检测——荣昌高速试验区"
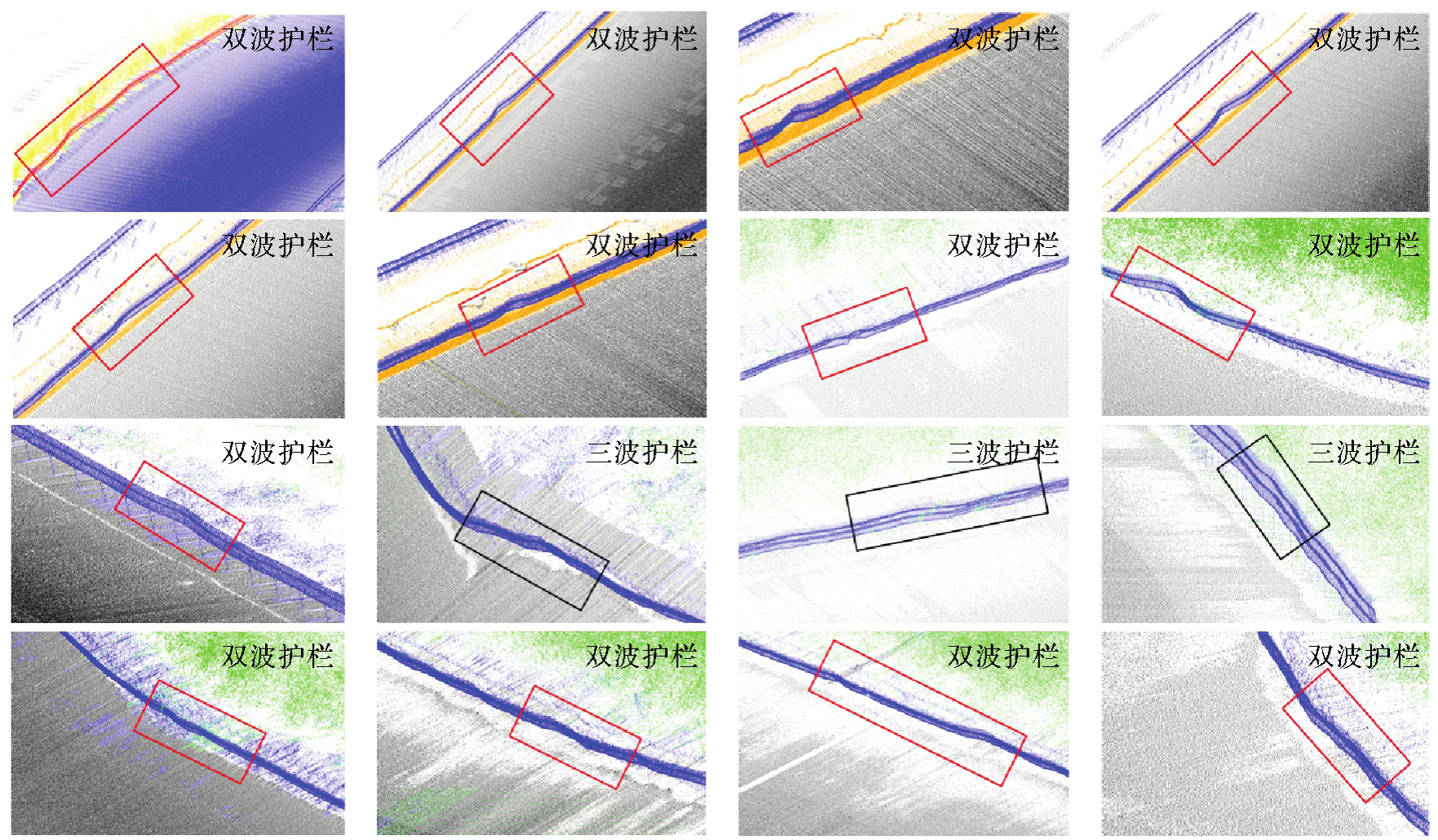
表4
变形护栏检测结果及里程定位"
| 护栏 | 变形里程检测/m | 实际里程位置/m | 实际里程范围/m | 里程误差/m |
|---|---|---|---|---|
| 1 | K46+419.9 | K11+422.0 | K46+420—K46+430 | +2.1 |
| 2 | K47+457.8 | K47+459.1 | K47+455—K47+465 | +1.3 |
| 3 | K49+263.0 | K49+263.0 | K49+270—K49+270 | 0 |
| 4 | K49+658.5 | K49+659.2 | K49+655—K49+665 | +0.7 |
| 5 | K50+341.6 | K50+339.1 | K50+335—K50+345 | -1.5 |
| 6 | K50+773.4 | K50+771.7 | K50+765—K50+775 | -1.7 |
| 7 | K51+583.5 | K51+585.1 | K51+580—K50+590 | +1.6 |
| 8 | K52+766.3 | K52+764.8 | K52+760—K52+770 | -1.5 |
| 9 | K52+844.7 | K52+846.4 | K52+840—K52+850 | +1.7 |
| 10 | K54+189.1 | K54+190.3 | K54+185—K54+195 | +1.2 |
| 11 | K55+380.2 | K55+379.0 | K55+375—K55+385 | -0.8 |
| 12 | K56+612.3 | K56+614.1 | K56+610—K56+620 | +1.8 |
| 13 | K57+296.7 | K57+298.0 | K57+290—K57+230 | +1.3 |
| 14 | K58+146.8 | K58+144.6 | K58+140—K58+150 | -2.2 |
| 15 | K58+475.0 | K58+473.6 | K58+470—K58+480 | -1.4 |
| 16 | K59+223.7 | K59+224.9 | K59+220—K59+230 | +1.2 |
表5
形变护栏里程定位方法对比"
| 方法 | 试验路段长度/km | 识别精度/(%) | 里程定位误差/m | 形变护栏数 | 有效检测数 |
|---|---|---|---|---|---|
| 文献[ | 12 | 92.8 | 10.0 | 11 | 10 |
| 本文方法 | 15.5 | 98.7 | 2.2 | 16 | 16 |
| [1] |
李升甫. 高速公路改扩建多源激光扫描数据集成处理与应用关键技术[J]. 测绘学报, 2023, 52(11): 2013. DOI:.
doi: 10.11947/)AGCS.2023.20220487 |
|
LI Shengfu. Multi-source laser scanning data integration processing and application of key technologies for expressway reconstruction and expansion[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(11): 2013. DOI:.
doi: 10.11947/)AGCS.2023.20220487 |
|
| [2] | 王羽尘, 于斌, 陈晓阳, 等. 基于激光雷达点云的道路几何信息提取与数字化建模研究[J]. 中国公路学报, 2023, 36(3): 45-60. |
| WANG Yuchen, YU Bin, CHEN Xiaoyang, et al. Extraction and digital modeling of road geometric information using LiDAR data point clouds[J]. China Journal of Highway and Transport, 2023, 36(3): 45-60. | |
| [3] | 杜豫川, 刘成龙, 吴荻非, 等. 新一代智慧高速公路系统架构设计[J]. 中国公路学报, 2022, 35(4): 203-214. |
| DU Yuchuan, LIU Chenglong, WU Difei, et al. Framework of the new generation of smart highway[J]. China Journal of Highway and Transport, 2022, 35(4): 203-214. | |
| [4] | HUANG Ming, ZHOU Chuanli, HUO Pengpeng, et al. Expressway guardrail extraction and classification based on slice method[J]. Sensors and Materials, 2020, 32(11): 4005. |
| [5] | RIO J, FERREIRA B, POÇAS-MARTINS J. Expansion of IFC model with structural sensors[J]. Informes de la Construcción, 2013, 65(530): 219-228. |
| [6] | SOILÁN M, JUSTO A, SÁNCHEZ-RODRÍGUEZ A, et al. 3D point cloud to BIM: semi-automated framework to define IFC alignment entities from MLS-acquired LiDAR data of highway roads[J]. Remote Sensing, 2020, 12(14): 2301. |
| [7] | ZHOU Yuzhou, HUANG Ronggang, JIANG Tengping, et al. Highway alignments extraction and 3D modeling from airborne laser scanning point clouds[J]. International Journal of Applied Earth Observation and Geoinformation, 2021, 102: 102429. |
| [8] | SOILÁN M, NÓVOA A, SÁNCHEZ-RODRÍGUEZ A, et al. Fully automated methodology for the delineation of railway lanes and the generation of IFC alignment models using 3D point cloud data[J]. Automation in Construction, 2021, 126: 103684. |
| [9] | BIANCARDO S A, VISCIONE N, CERBONE A, et al. BIM-based design for road infrastructure: a critical focus on modeling guardrails and retaining walls[J]. Infrastructures, 2020, 5(7): 59. |
| [10] |
朱庆, 张利国, 丁雨淋, 等. 从实景三维建模到数字孪生建模[J]. 测绘学报, 2022, 51(6): 1040-1049. DOI:.
doi: 10.11947/j.AGCS.2022.20210640 |
|
ZHU Qing, ZHANG Liguo, DING Yulin, et al. From real 3D modeling to digital twin modeling[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(6): 1040-1049. DOI:.
doi: 10.11947/j.AGCS.2022.20210640 |
|
| [11] | SOILÁN M, SÁNCHEZ-RODRÍGUEZ A, DEL RÍO-BARRAL P, et al. Review of laser scanning technologies and their applications for road and railway infrastructure monitoring[J]. Infrastructures, 2019, 4(4): 58. |
| [12] | PUENTE I, GONZÁLEZ-JORGE H, MARTÍNEZ-SÁNCHEZ J, et al. Review of mobile mapping and surveying technologies[J]. Measurement, 2013, 46(7): 2127-2145. |
| [13] | WILLIAMS K, OLSEN M J, ROE G V, et al. Synthesis of transportation applications of mobile LiDAR[J]. Remote Sensing, 2013, 5(9): 4652-4692. |
| [14] | MA Lingfei, LI Ying, LI J, et al. Mobile laser scanned point-clouds for road object detection and extraction: a review[J]. Remote Sensing, 2018, 10(10): 1531. |
| [15] |
方莉娜, 沈贵熙, 游志龙, 等. 融合点云和多视图的车载激光点云路侧多目标识别[J]. 测绘学报, 2021, 50(11): 1558-1573. DOI:.
doi: 10.11947/j.AGCS.2021.20210246 |
|
FANG Lina, SHEN Guixi, YOU Zhilong, et al. A joint network of point cloud and multiple views for roadside objects recognition from mobile laser point clouds[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1558-1573. DOI:.
doi: 10.11947/j.AGCS.2021.20210246 |
|
| [16] | ZEYBEK M. Extraction of road lane markings from mobile LiDAR data[J]. Transportation Research Record: Journal of the Transportation Research Board, 2021, 2675(5): 30-47. |
| [17] | PǍTRǍUCEAN V, ARMENI I, NAHANGI M, et al. State of research in automatic as-built modelling[J]. Advanced Engineering Informatics, 2015, 29(2): 162-171. |
| [18] | BARAZZETTI L, PREVITALI M, SCAIONI M. Roads detection and parametrization in integrated BIM-GIS using LiDAR[J]. Infrastructures, 2020, 5(7): 55. |
| [19] | NOVÁČEK J, KOHOUT T, VRTAL P, et al. Application of RSA principles to improve the BIM in the road design process with focus on the road restraint systems[J]. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2022, 46: 159-164. |
| [20] | JUSTO A, SOILÁN M, SÁNCHEZ-RODRÍGUEZ A, et al. Scan-to-BIM for the infrastructure domain: generation of IFC-compliant models of road infrastructure assets and semantics using 3D point cloud data[J]. Automation in Construction, 2021, 127: 103703. |
| [21] | ZHU Hao, GUO Bin. A beam guardrail detection algorithm using LiDAR for intelligent vehicle[C]//Proceedings of 2018 Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems. Tianjin: IEEE, 2018: 1398-1402. |
| [22] | JIANG Yu, HE Bei, LIU Li, et al. Effective and robust corrugated beam guardrail detection based on mobile laser scanning data[C]//Proceedings of 2016 International Conference on Intelligent Transportation Systems. Rio de Janeiro: IEEE, 2016: 1540-1545. |
| [23] | YUE Yuanwen, GOUDA M, EL-BASYOUNY K. Automatic detection and mapping of highway guardrails from mobile LiDAR point clouds[C]//Proceedings of 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS. Brussels: IEEE, 2021: 2520-2523. |
| [24] | GAO Jianlan, CHEN Yiping, JUNIOR J M, et al. Rapid extraction of urban road guardrails from mobile LiDAR point clouds[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 1572-1577. |
| [25] | HU Qingyong, YANG Bo, XIE Linhai, et al. RandLA-Net: efficient semantic segmentation of large-scale point clouds[C]//Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 11108-11117. |
| [26] | JIA Xin, ZHU Qing, GE Xuming, et al. Robust guardrail instantiation and trajectory optimization of complex highways based on mobile laser scanning point clouds[J]. Photogrammetric Engineering & Remote Sensing, 2023, 89(3): 151-161. |
| [27] | KEDZIERSKI M, FRYSKOWSKA A. Terrestrial and aerial laser scanning data integration using wavelet analysis for the purpose of 3D building modeling[J]. Sensors, 2014, 14(7): 12070-12092. |
| [28] | MA Lingfei, LI Ying, LI J, et al. Generation of horizontally curved driving lines in HD maps using mobile laser scanning point clouds[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(5): 1572-1586. |
| [29] | ZHANG Xiaopeng, LI Hongjun, CHENG Zhanglin. Curvature estimation of 3D point cloud surfaces through the fitting of normal section curvatures[EB/OL]. [2024-06-21]. https://nlpr.ia.ac.cn/2008papers/gjhy/gh129.pdf. |
| [30] | 李振宇, 李林, 朱晓峰, 等. 基于双目视觉的形变护栏检测及里程定位[J]. 交通科技与经济, 2022, 24(2): 24-33. |
| LI Zhenyu, LI Lin, ZHU Xiaofeng, et al. Deformation guardrail detection and mileage location based on binocular vision[J]. Technology & Economy in Areas of Communications, 2022, 24(2): 24-33. |
| [1] | 邵克凡, 李增科, 孙猛, 刘振彬, 吴祺. 智能手机多源数据融合增强的地磁SLAM方法[J]. 测绘学报, 2025, 54(10): 1812-1825. |
| [2] | 吴唯同, 陈驰, 杨必胜, 何秀凤. 退化场景稳健的激光雷达、毫米波雷达与惯性融合里程计方法[J]. 测绘学报, 2025, 54(9): 1677-1686. |
| [3] | 刘佳音, 李佳田, 陈国坤, 阿晓荟, 韦晶晶, 胡浩. 一种利用目标变化估计相机姿态的马氏模型[J]. 测绘学报, 2025, 54(6): 1071-1081. |
| [4] | 赖路广, 赵冬青, 李林阳, 樊文哲, 李雄庆, 李鹏飞. 弱纹理黑暗场景下点线结合的红外惯性里程计[J]. 测绘学报, 2025, 54(3): 448-460. |
| [5] | 蔺小虎, 杨鑫, 姚顽强, 马宏伟, 马柏林, 马雄伟. 面向复杂地下空间的多源传感器数据动态加权融合SLAM方法[J]. 测绘学报, 2025, 54(3): 523-535. |
| [6] | 毛庆洲, 夏梦璇, 李清泉, 朱璟, 樊廷立. 多站点云光束法全局配准方法[J]. 测绘学报, 2024, 53(9): 1663-1670. |
| [7] | 张丹, 王伟峰, 黄桂平, 王新萍, 刘彦荣, 赵章红. 双相机工业摄影测量系统测量场误差分析与现场评定方法[J]. 测绘学报, 2024, 53(9): 1725-1736. |
| [8] | 康俊华. 基于全卷积神经网络的端到端立体密集匹配研究[J]. 测绘学报, 2022, 51(5): 785-785. |
| [9] | 李佳田, 王聪聪, 阿晓荟, 晏玲, 朱志浩, 高鹏. 多向前方交会与单隐层神经网络结合的近景前方交会法[J]. 测绘学报, 2020, 49(6): 736-745. |
| [10] | 闫利, 戴集成, 谭骏祥, 刘华, 陈长军. SLAM激光点云整体精配准位姿图技术[J]. 测绘学报, 2019, 48(3): 313-321. |
| [11] | 张春森, 张萌萌, 郭丙轩. 影像信息驱动的三角网格模型优化方法[J]. 测绘学报, 2018, 47(7): 959-967. |
| [12] | 闫利, 谭骏祥, 刘华, 陈长军. 融合遗传算法和ICP的地面与车载激光点云配准[J]. 测绘学报, 2018, 47(4): 528-536. |
| [13] | 张帆, 黄印, 黄先锋, 徐思奇. 非直视区域的普通平面镜辅助地面三维激光扫描方法[J]. 测绘学报, 2017, 46(12): 1950-1958. |
| [14] | 邓非, 吴幼丝, 胡玉雷, 崔红霞. 球形全景影像位姿估计的改进EPnP算法[J]. 测绘学报, 2016, 45(6): 677-684. |
| [15] | 王祥, 张永军, 黄山, 谢勋伟. 旋转多基线摄影光束法平差法方程矩阵带宽优化[J]. 测绘学报, 2016, 45(2): 170-177. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||