

Acta Geodaetica et Cartographica Sinica ›› 2025, Vol. 54 ›› Issue (1): 194-205.doi: 10.11947/j.AGCS.2025.20240246
• Cartography and Geoinformation • Previous Articles
Zhengyang CAO1( ), Huazu ZHANG1, Zilong ZHAO2, Heng QI1, Luliang TANG1,3()
), Huazu ZHANG1, Zilong ZHAO2, Heng QI1, Luliang TANG1,3()
Received:2024-07-03
Revised:2025-01-09
Online:2025-02-17
Published:2025-02-17
Contact:
Luliang TANG
E-mail:zy.cao@whu.edu.cn;tll@whu.edu.cn
About author:CAO Zhengyang (1999—), male, postgraduate, majors in 3S integration. E-mail: zy.cao@whu.edu.cn
Supported by:CLC Number:
Zhengyang CAO, Huazu ZHANG, Zilong ZHAO, Heng QI, Luliang TANG. Crowdsourcing extraction method for refined lane-level road information by integrating public on-board image with GNSS trajectory[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 194-205.
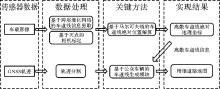
Fig. 1
Framework of refined lane maps generation"
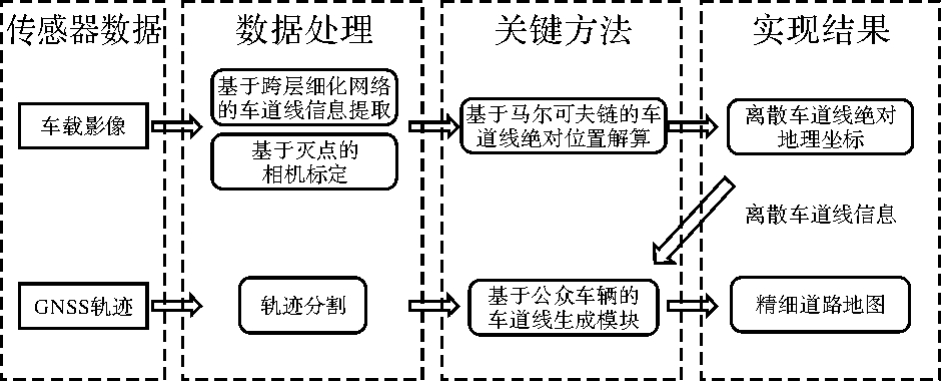
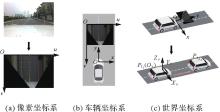
Fig. 2
Coordinate systems involved in this paper"

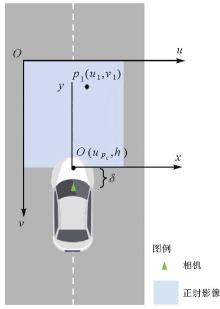
Fig. 3
Vehicle coordinate system"
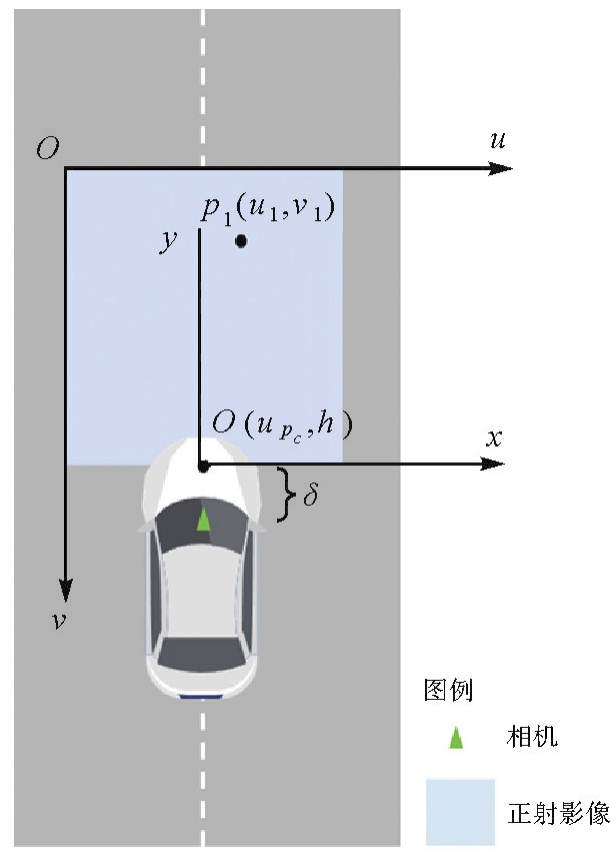
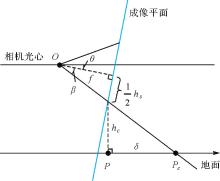
Fig. 4
Vehicle-mounted camera imaging"
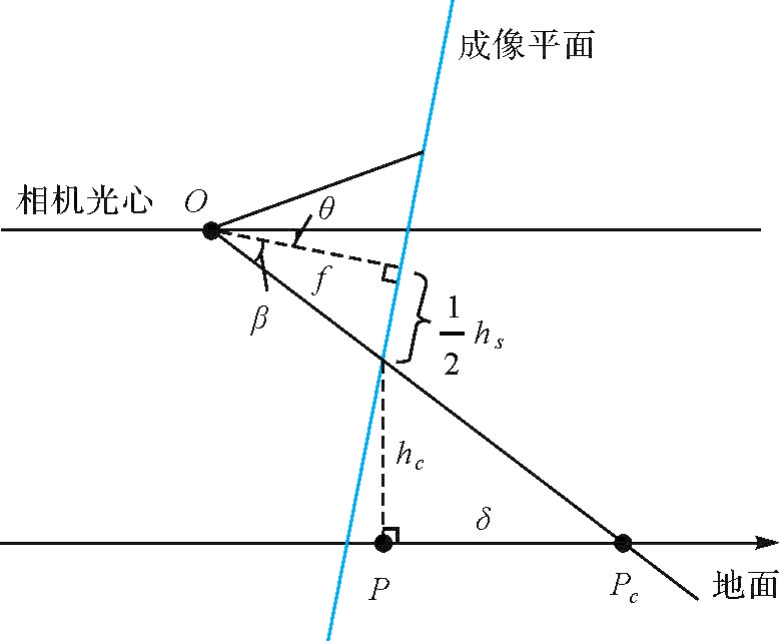
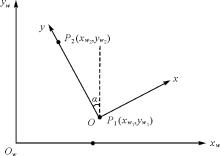
Fig. 5
Conversion between vehicle coordinate system and projection coordinate system"
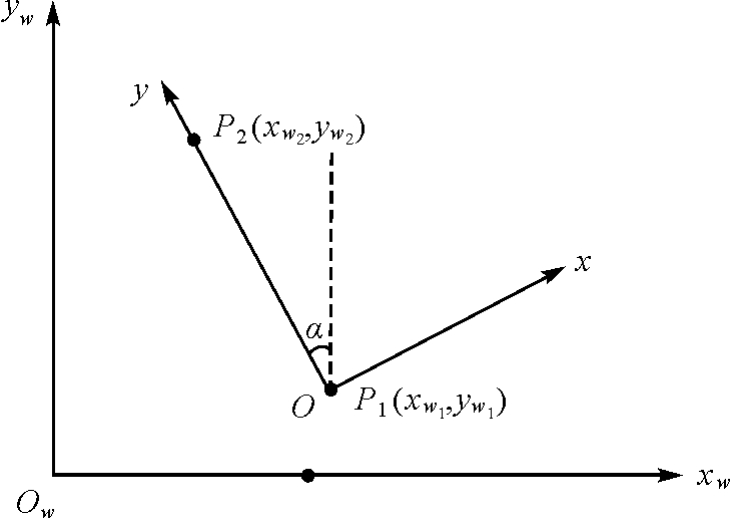
Fig. 6
Road centerline"
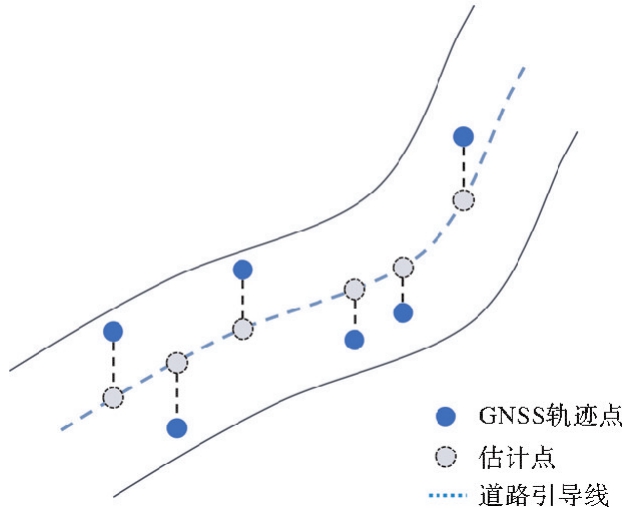
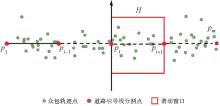
Fig. 7
Lane number detection"
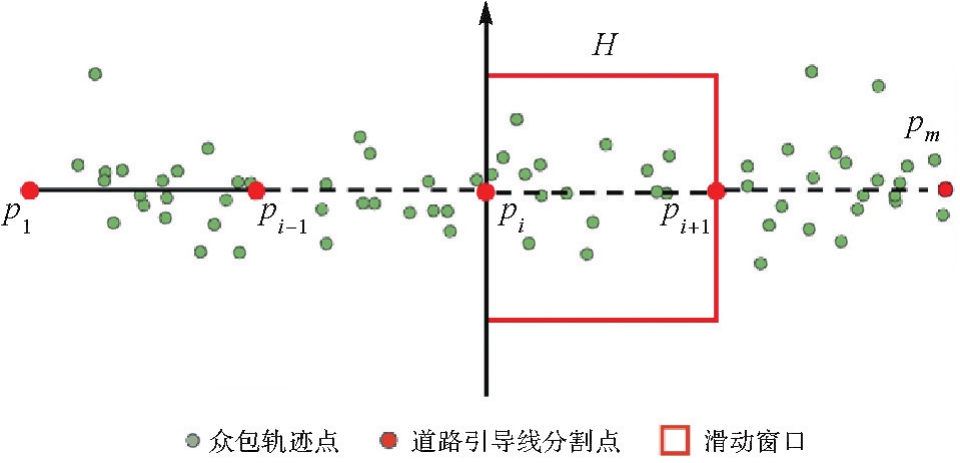

Fig. 8
Crowdsourcing trajectory point sampling"
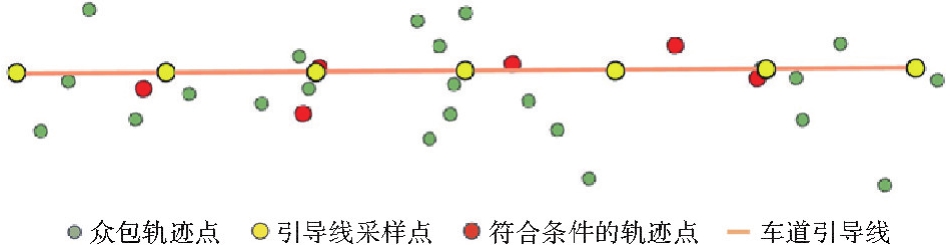
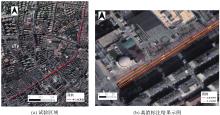
Fig. 9
Experimental area and manual annotation results"

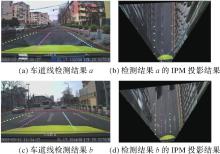
Fig. 10
Lane detection and projection results"

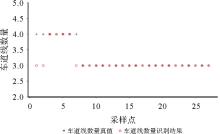
Fig. 11
Detection results of lane number"
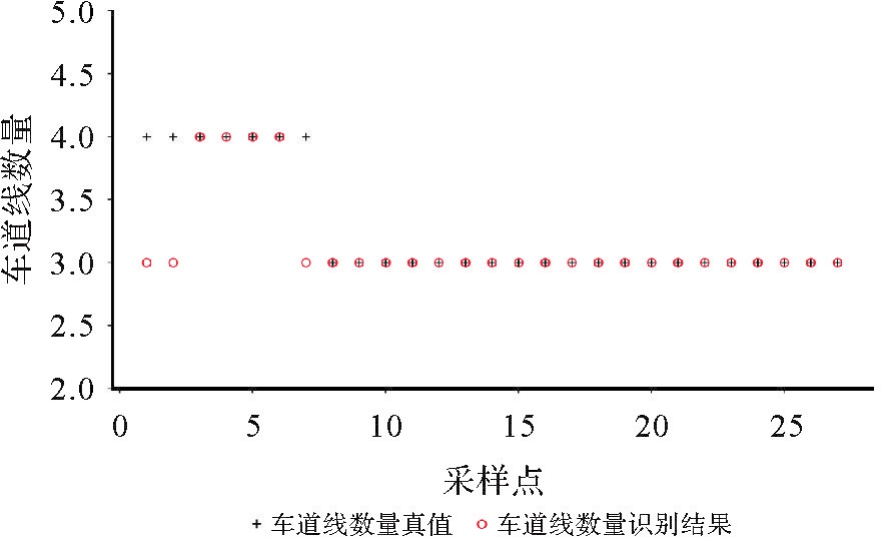
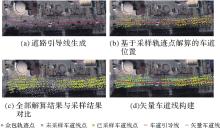
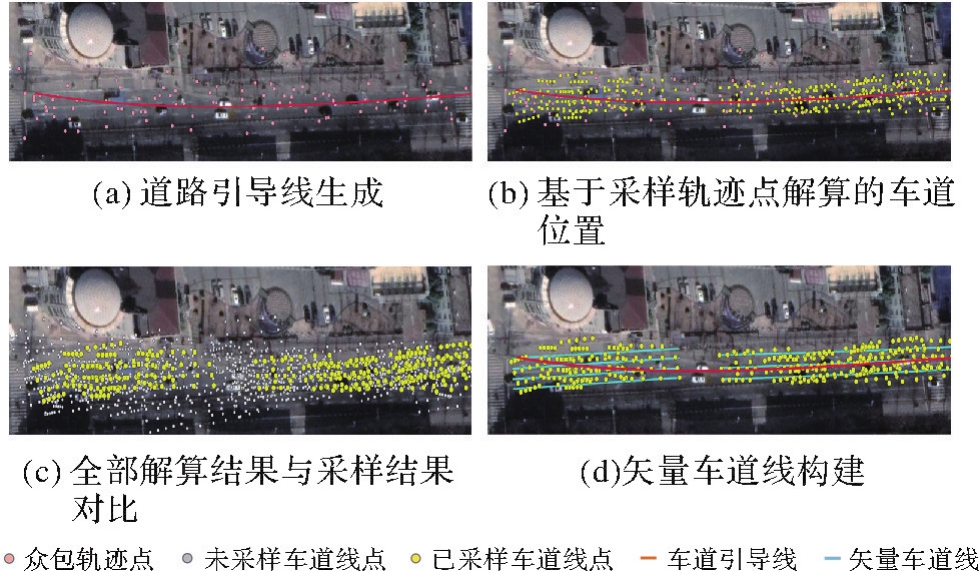
Fig. 12
Crowdsourcing trajectory point sampling and mapping"
Tab. 1
Lane attribute information"
| 路段名称 | 路段车道数量 | 车道线索引 | 车道线分类 |
|---|---|---|---|
| 水电路北段-1 | 2 | 1 | 白色实线 |
| 水电路北段-1 | 2 | 2 | 黄色虚线 |
| 水电路北段-1 | 2 | 3 | 白色实线 |
| | | | |
| 柳营路西段-3 | 3 | 4 | 白色实线 |
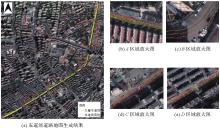
Fig. 13
Results of lane-level map generation"

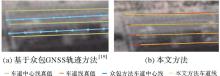
Fig. 14
Extraction results comparison of the lane-level map"

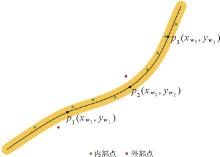
Fig. 15
Accuracy evaluation"

Tab. 2
Position accuracy evaluation results"
| 生成方法 | 缓冲区半径/m | 精度/(%) |
|---|---|---|
| 基于众包轨迹方法[ | 0.5 | 48.32 |
| 1 | 72.86 | |
| 2 | 89.26 | |
| 本文方法 | 0.5 | 52.89 |
| 1 | 87.43 | |
| 2 | 94.41 |
Tab. 3
Lane number accuracy evaluation results"
| 车道线生成方法 | TP | FP | FN | recallp | precisionp | Fp |
|---|---|---|---|---|---|---|
| 基于众包轨迹方法[ | 55 | 18 | 19 | 0.743 | 0.753 | 0.748 |
| 本文方法 | 62 | 5 | 6 | 0.912 | 0.925 | 0.918 |
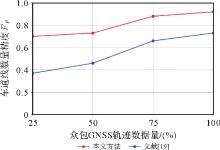
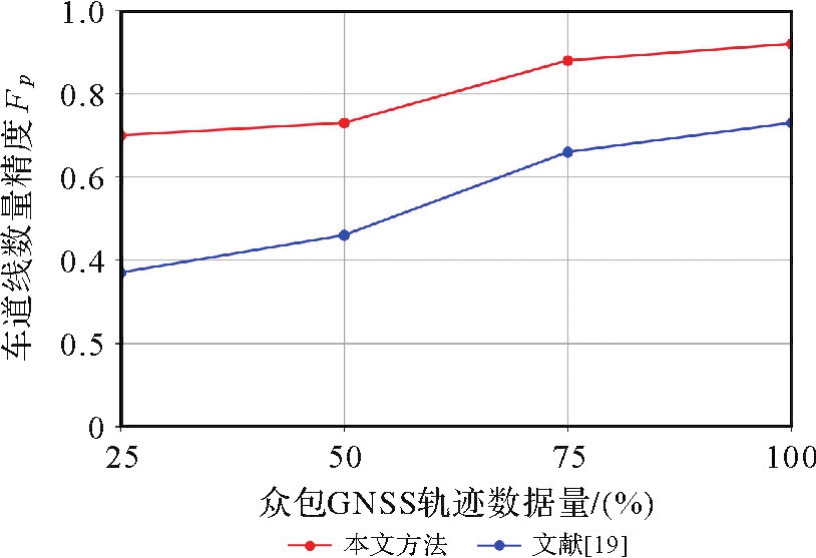
Fig. 16
Comparison of lane number accuracy under different trajectory quantities"
| [1] | VAN BRUMMELEN J, O'BRIEN M, GRUYER D, et al. Autonomous vehicle perception: the technology of today and tomorrow[J]. Transportation Research Part C: Emerging Technologies, 2018, 89: 384-406. |
| [2] |
LIU J, ZHAN J, GUO C, et al. Data logic structure and key technologies on intelligent high-precision map[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(3): 1-17. DOI:.
doi: 10.11947/j.JGGS.2020.0301 |
| [3] |
姚连璧, 秦长才, 张邵华, 等. 车载激光点云的道路标线提取及语义关联[J]. 测绘学报, 2020, 49(4): 480-488. DOI:.
doi: 10.11947/j.AGCS.2020.20190241 |
|
YAO Lianbi, QIN Changcai, ZHANG Shaohua, et al. Road marking extraction and semantic correlation based on vehicle-borne laser point cloud[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(4): 480-488. DOI:.
doi: 10.11947/j.AGCS.2020.20190241 |
|
| [4] | 侯翘楚, 李必军, 蔡毅. 高分辨率遥感影像的车道级高精地图要素提取[J]. 测绘通报, 2021(3): 38-43. |
| HOU Qiaochu, LI Bijun, CAI Yi. High-precision lane-level map elements extracting based on high-resolution remote sensing image[J]. Bulletin of Surveying and Mapping, 2021(3): 38-43. | |
| [5] | YU Y, LI J, GUAN H, et al. Learning hierarchical features for automated extraction of road markings from 3D mobile LiDAR point clouds[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8(2): 709-726. |
| [6] | SOILÁN M, RIVEIRO B, MARTÍNEZ-SÁNCHEZ J, et al. Segmentation and classification of road markings using MLS data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 123: 94-103. |
| [7] | JUNG J, BAE S H. Real-time road lane detection in urban areas using LiDAR data[J]. Electronics, 2018, 7(11): 276. |
| [8] | MA L, LI Y, LI J, et al. Mobile laser scanned point-clouds for road object detection and extraction: a review[J]. Remote Sensing, 2018, 10(10): 1531. |
| [9] | 史文中, 朱长青, 王昱. 从遥感影像提取道路特征的方法综述与展望[J]. 测绘学报, 2001, 30(3): 257-262. |
| SHI Wenzhong, ZHU Changqing, WANG Yu. Road feature extraction from remotely sensed image: review and prospects[J]. Acta Geodaetica et Cartographica Sinica, 2001, 30(3): 257-262. | |
| [10] | SHI W, MIAO Z, DEBAYLE J. An integrated method for urban main-road centerline extraction from optical remotely sensed imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(6): 3359-3372. |
| [11] | ZHANG Y, LI X, ZHANG Q. Road topology refinement via a multi-conditional generative adversarial network[J]. Sensors, 2019, 19(5): 1162. |
| [12] | ZHOU M, SUI H, CHEN S, et al. BT-RoadNet: a boundary and topologically-aware neural network for road extraction from high-resolution remote sensing imagery[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 168: 288-306. |
| [13] | 郑玲. 自动驾驶高精度地图生成方法研究[D]. 武汉: 武汉大学, 2019. |
| ZHENG Ling. Research on high-definition map generation method for autonomous driving[D]. Wuhan: Wuhan University, 2019. | |
| [14] |
唐炉亮, 赵紫龙, 杨雪, 等. 大数据环境下道路场景高时空分辨率众包感知方法[J]. 测绘学报, 2022, 51(6): 1070-1090. DOI:.
doi: 10.11947/j.AGCS.2022.20220155 |
|
TANG Luliang, ZHAO Zilong, YANG Xue, et al. Road crowd-sensing with high spatio-temporal resolution in big data era[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(6): 1070-1090. DOI:.
doi: 10.11947/j.AGCS.2022.20220155 |
|
| [15] | 童咏昕, 袁野, 成雨蓉, 等. 时空众包数据管理技术研究综述[J]. 软件学报, 2017, 28(1): 35-58. |
| TONG Yongxin, YUAN Ye, CHENG Yurong, et al. Survey on spatio-temporal crowdsourced data management techniques[J]. Journal of Software, 2017, 28(1): 35-58. | |
| [16] | ZHENG T, HUANG Y, LIU Y, et al. CLRNet: cross layer refinement network for lane detection[C]//Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. [S.l.]: IEEE, 2022: 898-907. |
| [17] | YANG X, TANG L, REN C, et al. Pedestrian network generation based on crowdsourced tracking data[J]. International Journal of Geographical Information Science, 2020, 34(5): 1051-1074. |
| [18] | UDUWARAGODA E, PERERA A S, DIAS S A D. Generating lane level road data from vehicle trajectories using kernel density estimation[C]//Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems. [S.l.]: IEEE, 2013: 384-391. |
| [19] | TANG L, YANG X, DONG Z, et al. CLRIC: collecting lane-based road information via crowdsourcing[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(9): 2552-2562. |
| [20] | YANG X, TANG L, STEWART K, et al. Automatic change detection in lane-level road networks using GPS trajectories[J]. International Journal of Geographical Information Science, 2018, 32(3): 601-621. |
| [21] | GUO C, KIDONO K, MEGURO J, et al. A low-cost solution for automatic lane-level map generation using conventional in-car sensors[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(8): 2355-2366. |
| [22] | SHI J, LI G, ZHOU L, et al. Lane-level road network construction based on street-view images[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2022, 15: 4744-4754. |
| [23] | 吴一全, 刘莉. 基于视觉的车道线检测方法研究进展[J]. 仪器仪表学报, 2019, 40(12): 92-109. |
| WU Yiquan, LIU Li. Research and development of the vision-based lane detection methods[J]. Chinese Journal of Scientific Instrument, 2019, 40(12): 92-109. | |
| [24] | FISCHLER M A, BOLLES R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24(6): 381-395. |
| [25] | ALY M. Real time detection of lane markers in urban streets[C]//Proceedings of 2008 IEEE Intelligent Vehicles Symposium. [S.l.]: IEEE, 2008: 7-12. |
| [26] | 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 道路交通标志和标线:GB 5768.3—2009[S]. 北京: 中国标准出版社, 2009. |
| General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China, Standardization Administration of the People's Republic of China, Road traffic signs and markings: GB 5768.3—2009[S]. Beijing: Standards Press of China, 2009. | |
| [27] | ODENCRANTZ J. Markov chains: gibbs fields, Monte Carlo simulation, and queues[J]. Technometrics, 2000, 42(4): 438. |
| [28] | ZHOU J, GUO Y, BIAN Y, et al. Lane information extraction for high definition maps using crowdsourced data[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 24(7): 1-11. |
| [29] |
唐炉亮, 刘章, 杨雪, 等. 符合认知规律的时空轨迹融合与路网生成方法[J]. 测绘学报, 2015, 44(11): 1271-1276. DOI:.
doi: 10.11947/j.AGCS.2015.20140591 |
|
TANG Luliang, LIU Zhang, YANG Xue, et al. A method of spatio-temporal trajectory fusion and road network generation based on cognitive law[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(11): 1271-1276. DOI:.
doi: 10.11947/j.AGCS.2015.20140591 |
|
| [30] | TANG L, YANG X, KAN Z, et al. Lane-level road information mining from vehicle GPS trajectories based on naïve Bayesian classification[J]. ISPRS International Journal of Geo-Information, 2015, 4(4): 2660-2680. |
| [31] | LEE J G, HAN J, WHANG K Y. Trajectory clustering: a partition-and-group framework[C]//Proceedings of 2007 ACM SIGMOD International Conference on Management of Data. New York: Association for Computing Machinery, 2007: 593-604. |
| [32] | VISVALINGAM M, WHYATT J D. The Douglas-Peucker algorithm for line simplification: re-evaluation through visualization[J]. Computer Graphics Forum, 1990, 9(3): 213-225. |
| [33] | YU F, WANG D, SHELHAMER E, et al. Deep layer aggregation[C]//Proceedings of 2018 IEEE Conference on Computer Vision and Pattern Recognition. [S.l.]: IEEE, 2018: 2403-2412. |
| [34] | PAN X, SHI J, LUO P, et al. Spatial as deep: spatial CNN for traffic scene understanding[J/OL]. Proceedings of the AAAI Conference on Artificial Intelligence. https://doi:org/10.1609/aaai.v32i/.12301. |
| [35] | YUAN M, YUE P, YANG C, et al. Generating lane-level road networks from high-precision trajectory data with lane-changing behavior analysis[J]. International Journal of Geographical Information Science, 2024, 38(2): 243-273. |
| [36] | SHU J, WANG S, JIA X, et al. Efficient lane-level map building via vehicle-based crowdsourcing[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(5): 4049-4062. |
| [1] | WANG Zihao, TANG Luliang, YANG Xue, DAI Ling, LI Chaokui. The U-Turn information collecting method using vehicle GNSS trajectory data [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(8): 1330-1341. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||