

Acta Geodaetica et Cartographica Sinica ›› 2026, Vol. 55 ›› Issue (3): 465-476.doi: 10.11947/j.AGCS.2026.20250287
• Geodesy and Navigation • Previous Articles Next Articles
Rui ZHOU1( ), Feng ZHU1(), Xiaohong ZHANG2
), Feng ZHU1(), Xiaohong ZHANG2
Received:2025-07-14
Revised:2026-03-18
Online:2026-04-16
Published:2026-04-16
Contact:
Feng ZHU
E-mail:ruichou@whu.edu.cn;fzhu@whu.edu.cn
About author:ZHOU Rui (2000—), male, postgraduate, majors in multi-sensor fusion navigation and positioning. E-mail: ruichou@whu.edu.cn
Supported by:CLC Number:
Rui ZHOU, Feng ZHU, Xiaohong ZHANG. Camera-IMU extrinsic calibration based on prior poses and motion planning[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 465-476.

Fig. 1
Optimization strategy for sensor extrinsics"
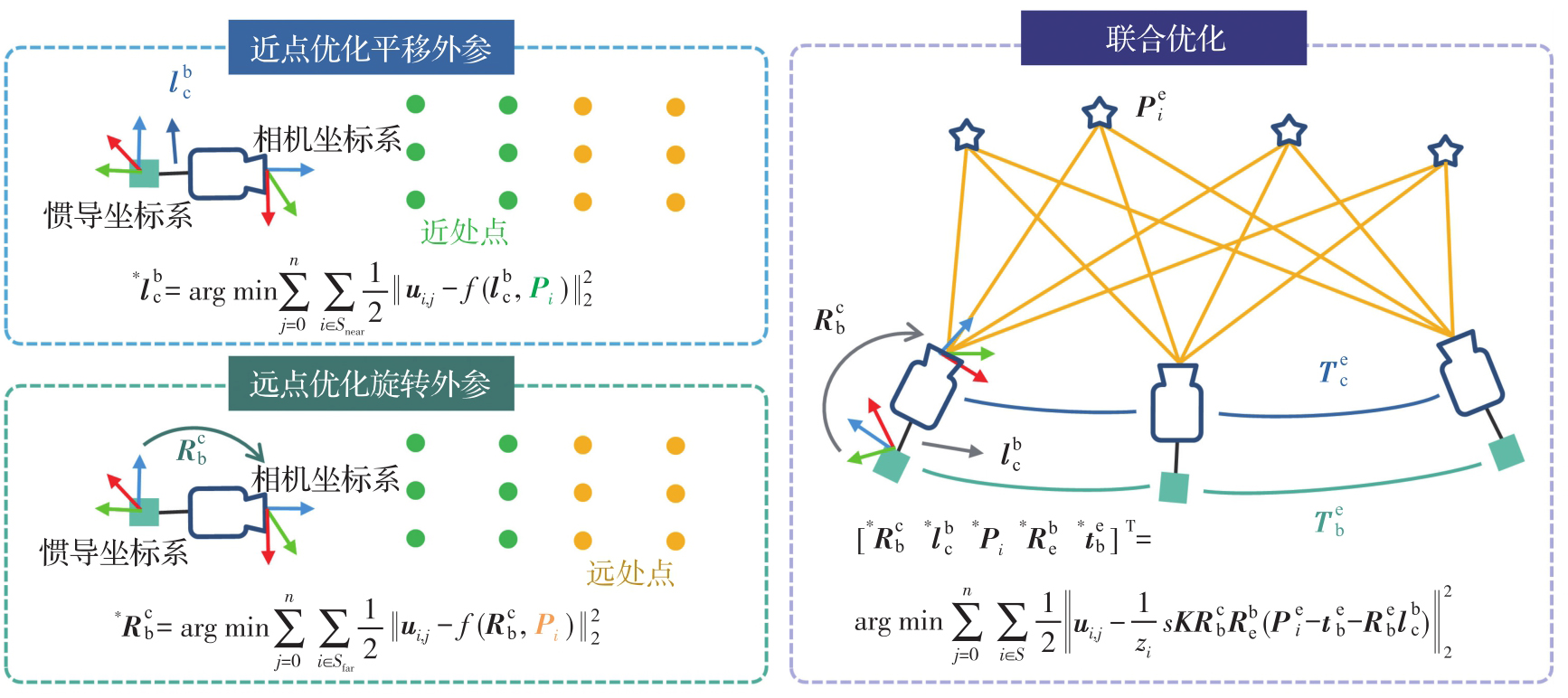
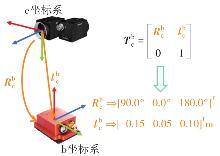
Fig. 2
Extrinsic parameters in simulation experiments"
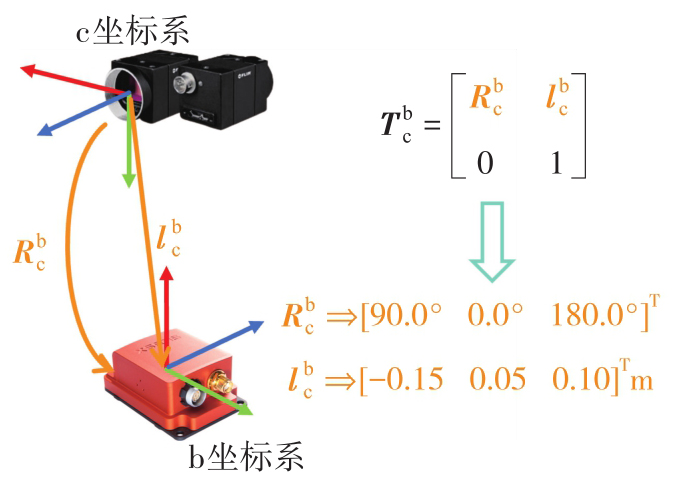
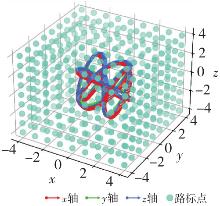
Fig. 3
Simulated trajectory and landmark points"
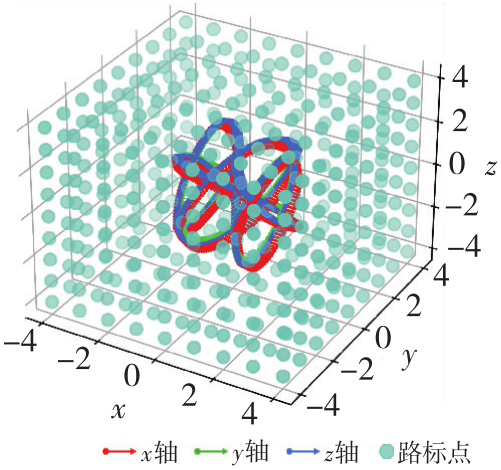

Fig. 4
The position and orientation of the simulated trajectory"
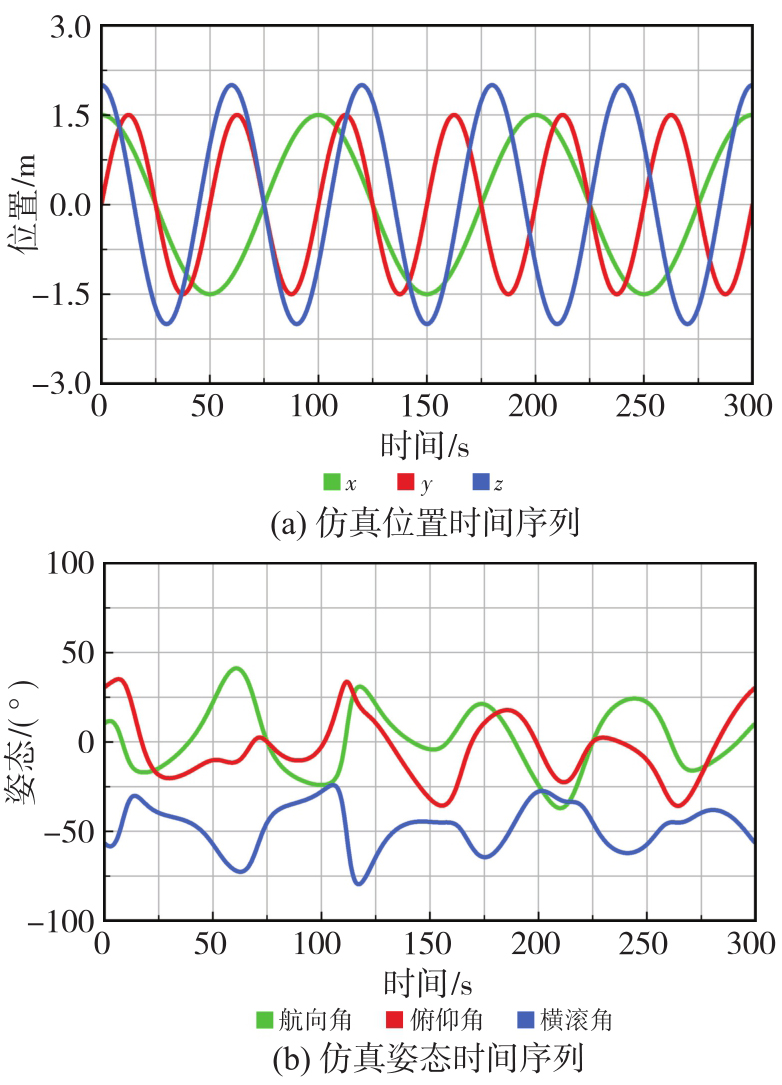

Fig. 5
Cumulative error distribution plot and box plot of the simulation experiment"
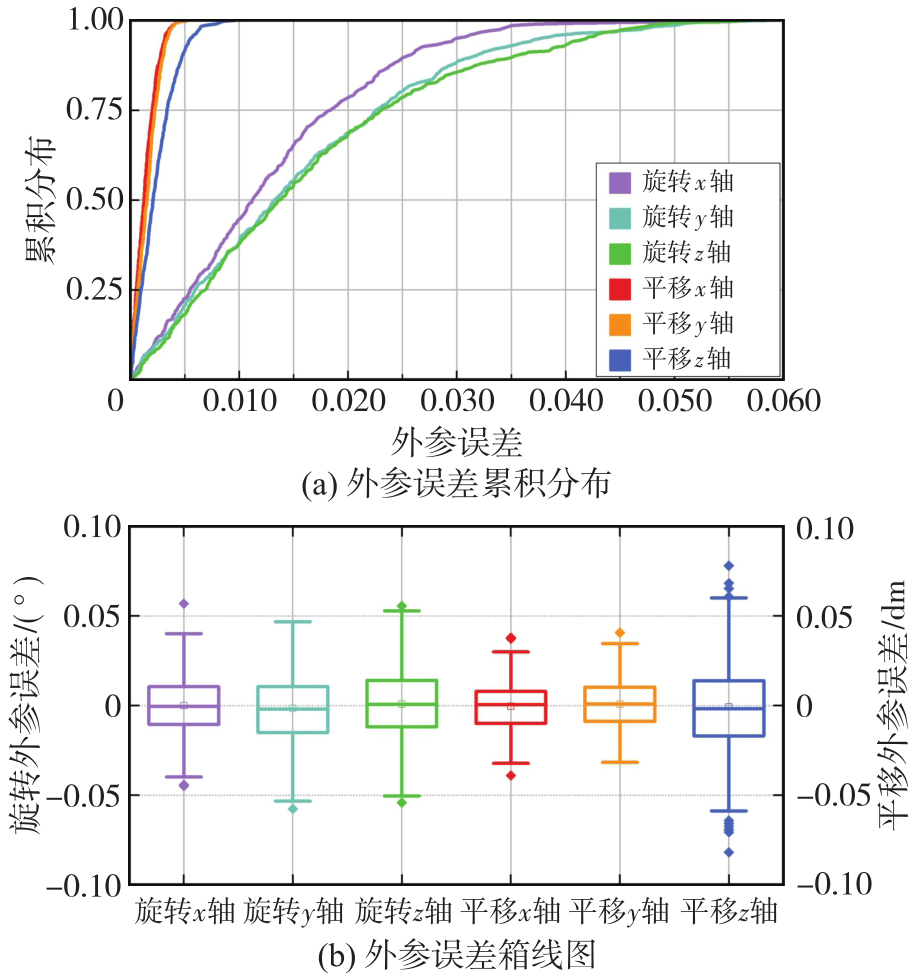
Tab. 1
Statistical analysis of extrinsic calibration errors in simulation experiments"
| 先验位姿误差 | 外参标定误差 | RMS | 2σ值 |
|---|---|---|---|
| 0.02 m/0.1°(2像素) | 旋转x轴/(°) | 0.015 | 0.032 |
| 旋转y轴/(°) | 0.019 | 0.039 | |
| 旋转z轴/(°) | 0.020 | 0.041 | |
| 平移x轴/m | 0.002 | 0.004 | |
| 平移y轴/m | 0.002 | 0.004 | |
| 平移z轴/m | 0.003 | 0.006 |
Tab. 2
Statistical analysis of extrinsic calibration error results under varying pose errors and pixel errors in simulation experiments"
| 先验位姿误差 | 像素误差/像素 | RMS | 解算成功率/(%) | ||
|---|---|---|---|---|---|
| 位置/m | 姿态/(°) | 旋转外参/(°) | 平移外参/m | ||
| 0.00 | 0.1 | 2 | 0.004 | 0.001 | 100 |
| 0.01 | 0.009 | 0.001 | 100 | ||
| 0.02 | 0.018 | 0.002 | 100 | ||
| 0.03 | 0.025 | 0.004 | 99.2 | ||
| 0.04 | 0.038 | 0.006 | 96.1 | ||
| 0.05 | 0.050 | 0.009 | 92.5 | ||
| 0.02 | 0.0 | 2 | 0.017 | 0.002 | 100 |
| 0.1 | 0.018 | 0.002 | |||
| 0.2 | 0.018 | 0.002 | |||
| 0.3 | 0.021 | 0.003 | |||
| 0.4 | 0.026 | 0.003 | |||
| 0.5 | 0.030 | 0.004 | |||
| 0.02 | 0.1 | 0 | 0.017 | 0.002 | 100 |
| 1 | 0.017 | 0.002 | |||
| 2 | 0.018 | 0.002 | |||
| 3 | 0.018 | 0.002 | |||
| 4 | 0.019 | 0.002 | |||
| 5 | 0.019 | 0.002 | |||

Fig. 6
Cumulative error distribution plots of extrinsic calibration results for different experimental groups"
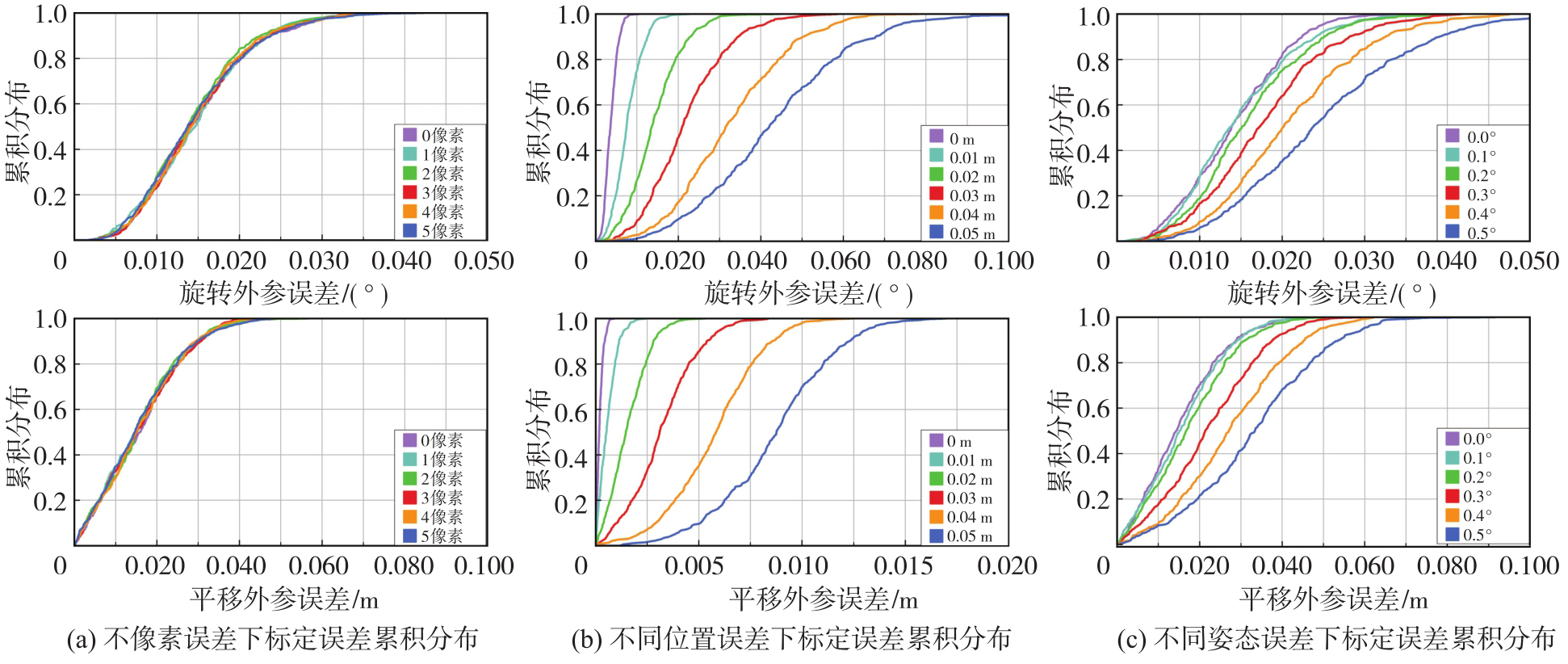
Tab. 3
Sensitivity analysis of near-far point threshold parameters in simulation experiments"
| 先验位姿误差 | 像素误差/像素 | 远近点阈值/m | RMS | 解算成功率/(%) | |
|---|---|---|---|---|---|
| 位置/m姿态/(°) | 旋转外参/(°) | 平移外参/m | |||
| 0.020.1 | 2 | 1 | 0.027 | 0.006 | 100 |
| 2 | 0.025 | 0.006 | |||
| 3 | 0.022 | 0.004 | |||
| 4 | 0.018 | 0.002 | |||
| 5 | 0.018 | 0.002 | |||
| 6 | 0.019 | 0.003 | |||
| 7 | 0.020 | 0.005 | |||
| 8 | 0.023 | 0.005 | |||
| 9 | 0.024 | 0.006 | |||
| 10 | 0.024 | 0.009 | |||

Fig. 7
Experimental setup and data acquisition platform"
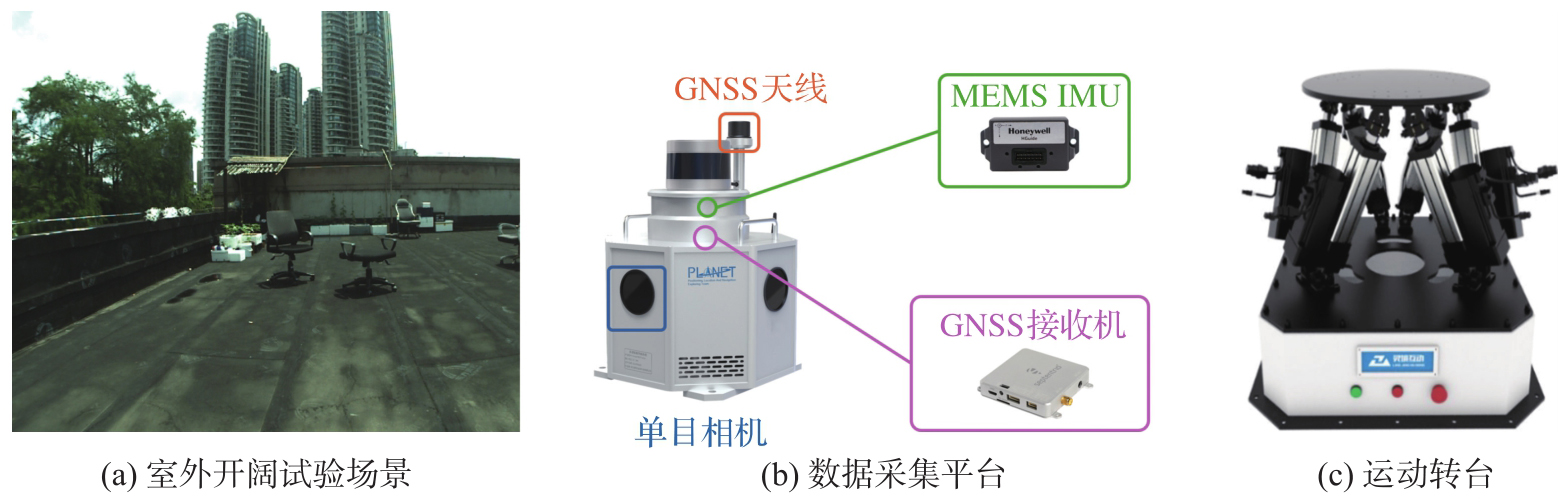
Tab. 4
Hardware information of the data acquisition platform"
| 传感器类型 | 典型参数 | 参数值 |
|---|---|---|
| MEMS-IMU(HGuide I300) | 速度随机游走 |  |
| 角度随机游走 |  | |
| 加表零偏不稳定性 | 20 μg | |
| 陀螺零偏不稳定性 | 3(°)/h | |
| 观测频率 | 200 Hz | |
| 单目相机(MER-131) | 快门类型 | 全局快门 |
| 分辨率 | 1280×1024像素 | |
| 观测频率 | 10 Hz | |
| GNSS接收机(Mosaic-X5) | GNSS天线 | HX-CH7609A |
| 观测频率 | 10 Hz |
Fig. 8
Planning of the turntable motion trajectory and an overview of the data acquisition process"
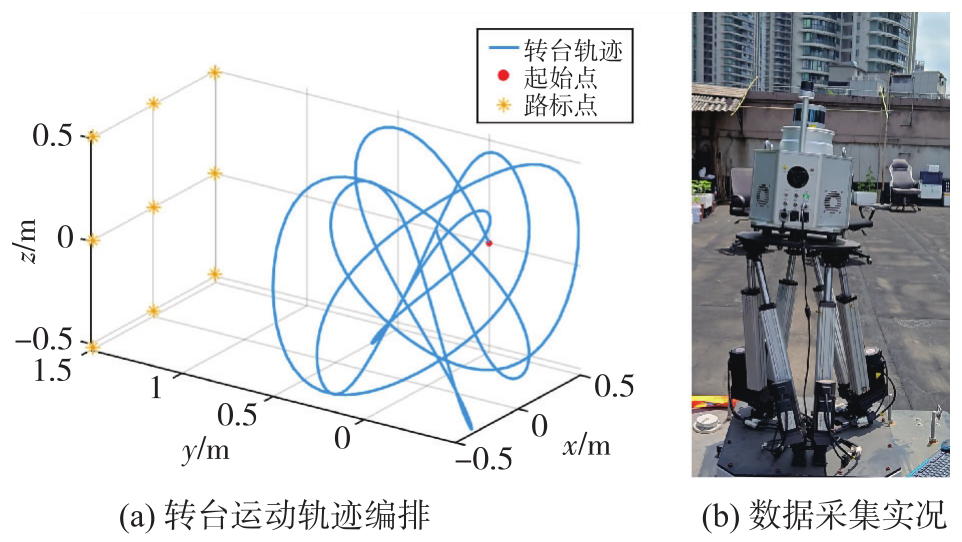
Fig. 9
GNSS status of the measured data"
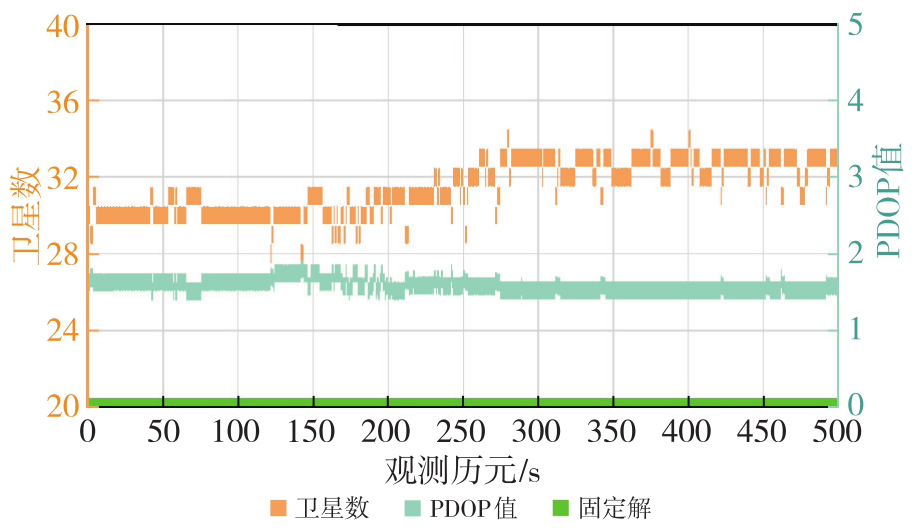
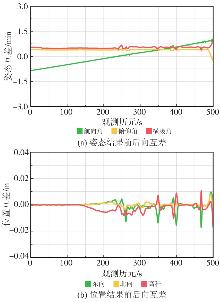
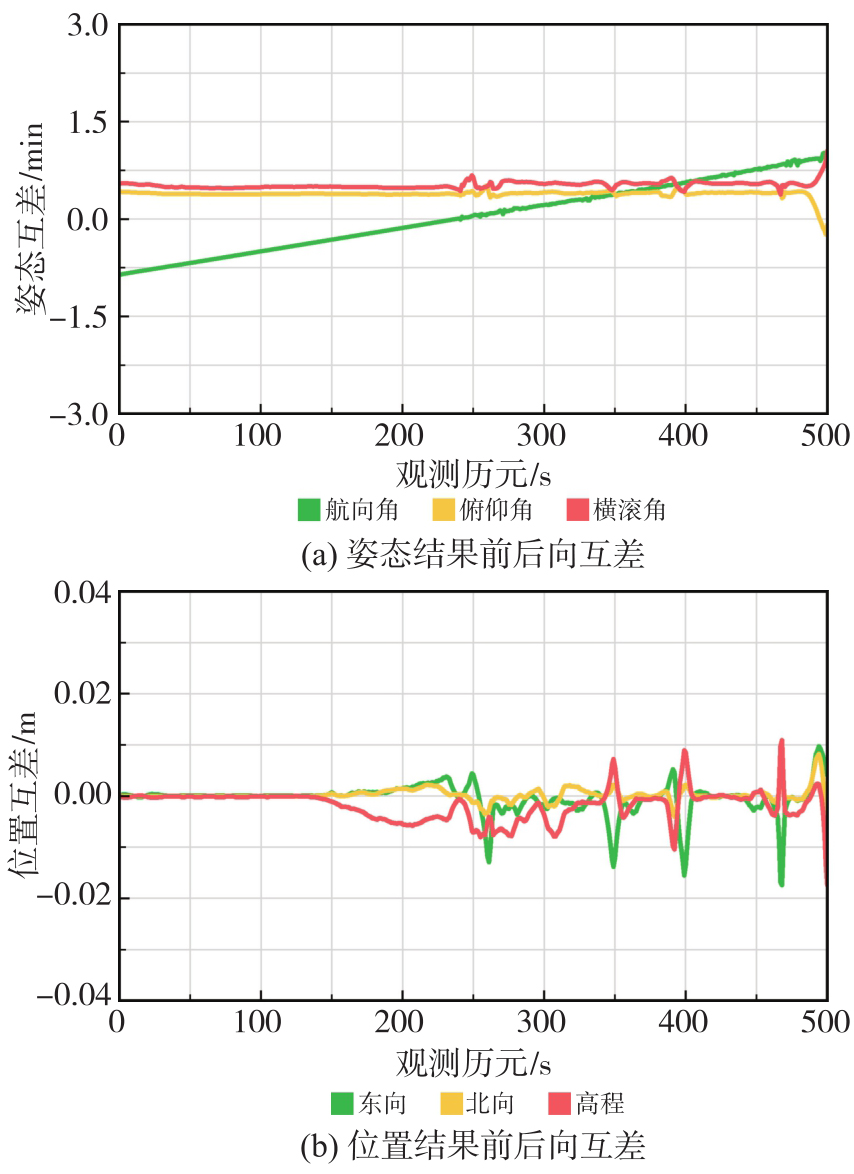
Fig. 10
Forward-backward residuals of RTK/INS post-processed tight coupling from measured data"
Tab. 5
Results of extrinsic parameter calibration on field data"
| 标定方法 | 旋转外参/(°) | 平移外参/m |
|---|---|---|
| 设计值 | (-90.00,0.00,180.00) | (0.150,0.000,-0.140) |
| 本文方法 | (-89.61,-0.19,179.63) | (0.144,-0.007,-0.134) |
| Kalibr | (-90.96,-0.32,179.11) | (0.139,0.005,-0.128) |
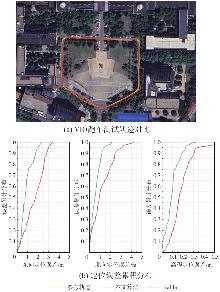
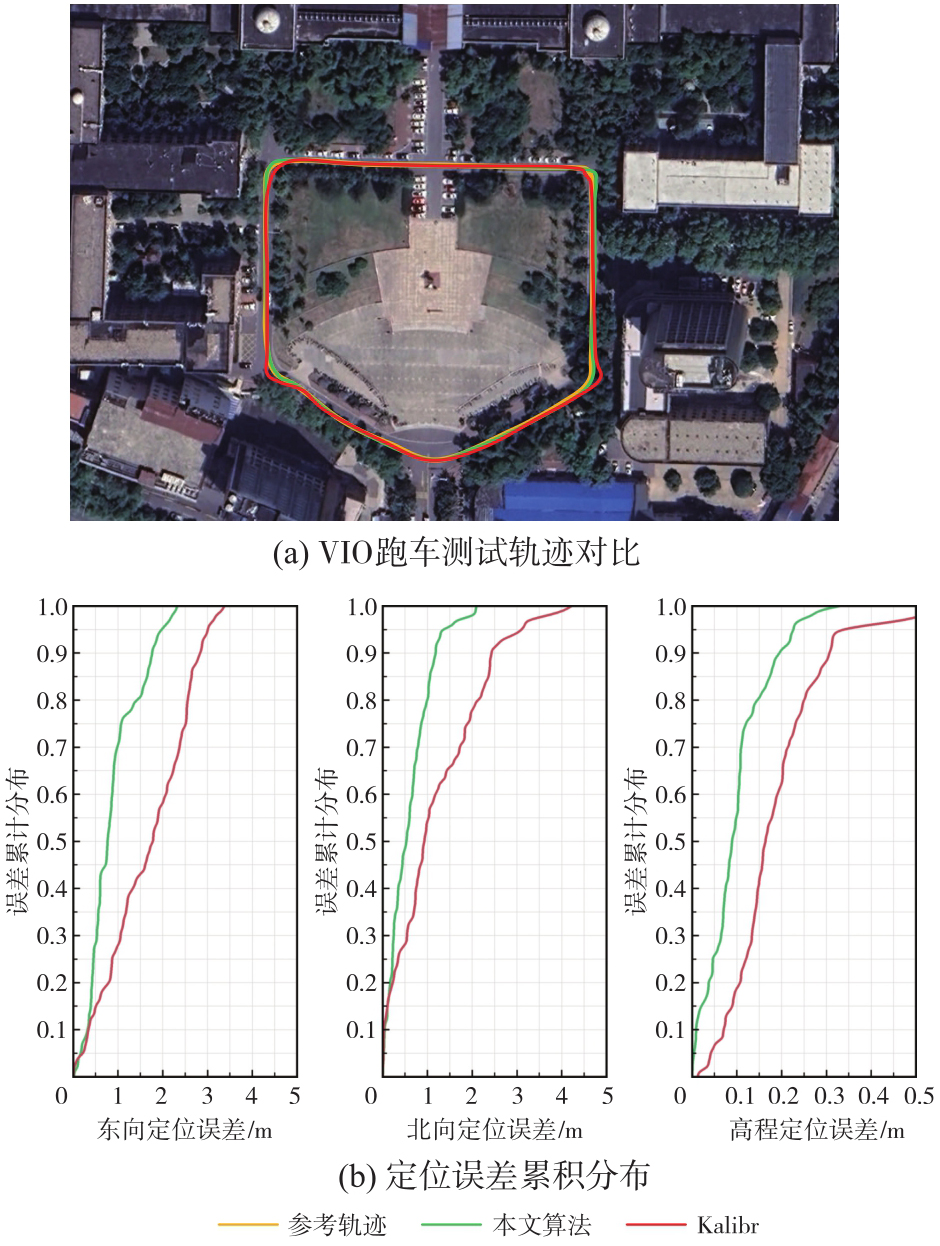
Fig. 11
Experimental results of visual-inertial odometry"
Tab. 6
Time consumption analysis of measured data calibration"
| 标定阶段 | 用时/min | |
|---|---|---|
| 本文方法 | Kalibr | |
| 数据采集 | 10 | 10 |
| 数据预处理 | 1 | 1 |
| GNSS/SINS解算 | 3 | — |
| 外参标定 | 3 | 5 |
| 总用时 | 17 | 16 |
| [1] | 杨元喜. 导航与定位若干注记[J]. 导航定位学报, 2015, 3(3): 1-4. |
| YANG Yuanxi. Notes of navigation and positioning[J]. Journal of Navigation and Positioning, 2015, 3(3): 1-4. | |
| [2] | 辜声峰, 戴春齐, 何成鹏, 等. 面向城市车载导航的多系统PPP-RTK/VIO半紧组合算法性能分析[J]. 武汉大学学报(信息科学版), 2021, 46(12): 1852-1861. |
| GU Shengfeng, DAI Chunqi, HE Chengpeng, et al. Analysis of semi-tightly coupled multi-GNSS PPP-RTK/VIO for vehicle navigation in urban areas[J]. Geomatics and Information Science of Wuhan University, 2021, 46(12): 1852-1861. | |
| [3] | 朱锋. GNSS/SINS/视觉多传感器融合的精密定位定姿方法与关键技术[D]. 武汉: 武汉大学, 2019. |
| ZHU Feng. GNSS/SINS/vision multi-sensors integration for precise positioning and orientation determination[D]. Wuhan: Wuhan University, 2019. | |
| [4] | 龚宁静. 无人系统多传感器标定问题研究[D]. 哈尔滨: 哈尔滨工业大学, 2021. |
| GONG Ningjing. Research on multi-sensor calibration for unmanned system[D]. Harbin: Harbin Institute of Technology, 2021. | |
| [5] | 黄平, 胡超, 张宁, 等. 车载LiDAR-IMU外参联合标定算法[J]. 仪器仪表学报, 2022, 43(10): 128-135. |
| HUANG Ping, HU Chao, ZHANG Ning, et al. Vehicle-mounted LiDAR-IMU external parameter joint calibration algorithm[J]. Chinese Journal of Scientific Instrument, 2022, 43(10): 128-135. | |
| [6] | 张守建, 李欣然, 王逸石, 等. 城市环境下视觉惯性里程计辅助PPP定位[J]. 导航定位学报, 2023, 11(6): 34-41, 101. |
| ZHANG Shoujian, LI Xinran, WANG Yishi, et al. Visual inertial odometry-aided PPP positioning in urban environments[J]. Journal of Navigation and Positioning, 2023, 11(6): 34-41, 101. | |
| [7] | 姚二亮, 张合新, 张国良, 等. 基于Vision-IMU的机器人同时定位与地图创建算法[J]. 仪器仪表学报, 2018, 39(4): 230-238. |
| YAO Erliang, ZHANG Hexin, ZHANG Guoliang, et al. Robot simultaneous localization and mapping algorithm based on vision and IMU[J]. Chinese Journal of Scientific Instrument, 2018, 39(4): 230-238. | |
| [8] | QIN Tong, LI Peiliang, SHEN Shaojie. VINS-mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. |
| [9] | CAMPOS C, ELVIRA R, RODRÍGUEZ J J G, et al. ORB-SLAM3: an accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| [10] | LEUTENEGGER S, LYNEN S, BOSSE M, et al. Keyframe-based visual-inertial odometry using nonlinear optimization[J]. The International Journal of Robotics Research, 2015, 34(3): 314-334. |
| [11] | LÜ Jiajun, ZUO Xingxing, HU Kewei, et al. Observability-aware intrinsic and extrinsic calibration of LiDAR-IMU systems[J]. IEEE Transactions on Robotics, 2022, 38(6): 3734-3753. |
| [12] | 潘林豪, 田福庆, 应文健, 等. 单目相机-IMU外参自动标定与在线估计的视觉-惯导SLAM[J]. 仪器仪表学报, 2019, 40(6): 56-67. |
| PAN Linhao, TIAN Fuqing, YING Wenjian, et al. VI-SLAM algorithm with camera-IMU extrinsic automatic calibration and online estimation[J]. Chinese Journal of Scientific Instrument, 2019, 40(6): 56-67. | |
| [13] | LI Mingyang, MOURIKIS A I. High-precision, consistent EKF-based visual-inertial odometry[J]. The International Journal of Robotics Research, 2013, 32(6): 690-711. |
| [14] | LI Mingyang, YU Hongsheng, ZHENG Xing, et al. High-fidelity sensor modeling and self-calibration in vision-aided inertial navigation[C]//Proceedings of 2014 IEEE International Conference on Robotics and Automation. New Yrok: IEEE, 2014: 409-416. |
| [15] | SCHNEIDER T, LI Mingyang, CADENA C, et al. Observability-aware self-calibration of visual and inertial sensors for ego-motion estimation[J]. IEEE Sensors Journal, 2019, 19(10): 3846-3860. |
| [16] | QIN Tong, SHEN Shaojie. Online temporal calibration for monocular visual-inertial systems[C]//Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. New Yrok: IEEE, 2019: 3662-3669. |
| [17] | YANG Zhenfei, SHEN Shaojie. Monocular visual-inertial state estimation with online initialization and camera-IMU extrinsic calibration[J]. IEEE Transactions on Automation Science and Engineering, 2017, 14(1): 39-51. |
| [18] | YANG Yulin, GENEVA P, ECKENHOFF K, et al. Degenerate motion analysis for aided INS with online spatial and temporal sensor calibration[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 2070-2077. |
| [19] | MIRZAEI F M, ROUMELIOTIS S I. A Kalman filter-based algorithm for IMU-camera calibration: observability analysis and performance evaluation[J]. IEEE Transactions on Robotics, 2008, 24(5): 1143-1156. |
| [20] | FURGALE P, BARFOOT T D, SIBLEY G. Continuous-time batch estimation using temporal basis functions[C]//Proceedings of 2012 IEEE International Conference on Robotics and Automation. New Yrok: IEEE, 2012: 2088-2095. |
| [21] | OTH L, FURGALE P, KNEIP L, et al. Rolling shutter camera calibration[C]//Proceedings of 2013 IEEE Conference on Computer Vision and Pattern Recognition. New Yrok: IEEE, 2013: 1360-1367. |
| [22] | MAYE J, FURGALE P, SIEGWART R. Self-supervised calibration for robotic systems[C]//Proceedings of 2013 IEEE Intelligent Vehicles Symposium (IV). New Yrok: IEEE, 2013: 473-480. |
| [23] | CHEN Shuolong, LI Xingxing, LI Shengyu, et al. Targetless spatiotemporal calibration for multiple heterogeneous cameras and IMUs based on continuous-time trajectory estimation[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 9515112. |
| [1] | Weitong WU, Chi CHEN, Bisheng YANG, Xiufeng HE. Robust multi-sensor fusion-based odometry method of LiDAR, millimeter-wave radar and IMU in degraded scenes [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(9): 1677-1686. |
| [2] | Yarong LUO, Wentao LU, Chi GUO, Jingnan LIU. Left-handed symmetry equivariant filtering model and algorithm for GNSS/INS integrated navigation [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(8): 1389-1403. |
| [3] | Gen LI, Hongzhou CHAI, Kaidi JIN, Zhao ZHAN. Underwater terrain matching method based on robust particle filter [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1841-1851. |
| [4] | Yarong LUO, Chi GUO, Wei OUYANG, Jingnan LIU. GNSS/SINS integrated navigation method considering the geometric property of biases state [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 26-39. |
| [5] | ZHANG Panpan, WU Lin, BAO Lifeng, LI Qianqian, LIU Hui, XI Menghan, WANG Yong. Research on gravity compensation of inertial navigation system based on multispectral gravity disturbance [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(8): 1255-1267. |
| [6] | LI Zengke, SUN Yaowen, CHEN Zhaobing, ZHAO Long, GAO Jingxiang. Optimization of variational Bayesian-based adaptive filter for closed-loop feedback in integrated navigation [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(5): 725-737. |
| [7] | WANG Xuanbin, LI Xingxing, LIAO Jianchi, FENG Shaoquan, LI Shengyu, ZHOU Yuxuan. Tightly-coupled stereo visual-inertial-LiDAR SLAM based on graph optimization [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(8): 1744-1756. |
| [8] | LIU Wanke, NONG Qi, TAO Xianlu, ZHU Feng, HU Jie. OD/SINS adaptive integrated navigation method with non-holonomic constraints [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(1): 9-17. |
| [9] | LI Qi, BAI Zhengdong, CHEN Bobo, GUO Jingjun, XIN Haohao, CHENG Yuhang, LI Qiong, WU Fei. A novel track measurement system based on GNSS/INS and multisensor for high-speed railway [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(5): 569-579. |
| [10] | LIU Tao, XU Aigong, SUI Xin. EEMD Interval Threshold De-noising Method for Inertial Navigation [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(7): 907-915. |
| [11] | LI Zengke, WANG Jian, GAO Jingxiang, YAO Yifei. The Application of Adaptive Federated Filter in GPS-INS-Odometer Integrated Navigation [J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(2): 157-163. |
| [12] | TAN Xinglong, WANG Jian, ZHAO Changsheng. Neural Network Aided Adaptive UKF Algorithm for GPS/INS Integration Navigation [J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(4): 384-391. |
| [13] | . SVR Aided Adaptive Robust Filtering Algorithm for GPS/INS Integrated Navigation [J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(6): 590-606. |
| [14] | . The adaptive filtering by selecting the parameter weights for single antenna GPS/INS loosely coupled model with GPS heading constraint [J]. Acta Geodaetica et Cartographica Sinica, 2011, 40(4): 0-441. |
| [15] | WANG Zhi-Gang 1,Shaofeng Bian2. Local Gravity Field Model Based Underwater Gravity Aided Inertial Navigation [J]. Acta Geodaetica et Cartographica Sinica, 2009, 38(5): 0-414. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||