

Acta Geodaetica et Cartographica Sinica ›› 2025, Vol. 54 ›› Issue (1): 123-135.doi: 10.11947/j.AGCS.2025.20230439
• Photogrammetry and Remote Sensing • Previous Articles Next Articles
Jiayi TANG( ), Xiaochong TONG(), Chunping QIU, Yaxian LEI, Yi LEI, Haoshuai SONG
), Xiaochong TONG(), Chunping QIU, Yaxian LEI, Yi LEI, Haoshuai SONG
Received:2023-10-07
Revised:2024-12-17
Online:2025-02-17
Published:2025-02-17
Contact:
Xiaochong TONG
E-mail:tangjiayi113769@163.com;txchr@aliyun.com
About author:TANG Jiayi (2000—), female, PhD candidate, majors in geospatial intelligence. E-mail: tangjiayi113769@163.com
Supported by:CLC Number:
Jiayi TANG, Xiaochong TONG, Chunping QIU, Yaxian LEI, Yi LEI, Haoshuai SONG. Remote sensing scene retrieval method based on scene graph[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 123-135.
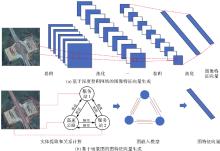
Fig. 1
Comparison between image feature vector and graph feature vector"

Tab. 1
Remote sensing scene graph dataset"
| 遥感图像 | 场景图 |
|---|---|
 |  |
 | 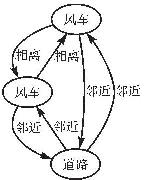 |

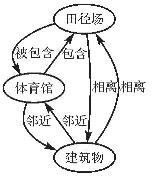
Fig. 2
Remote sensing scene graph case"
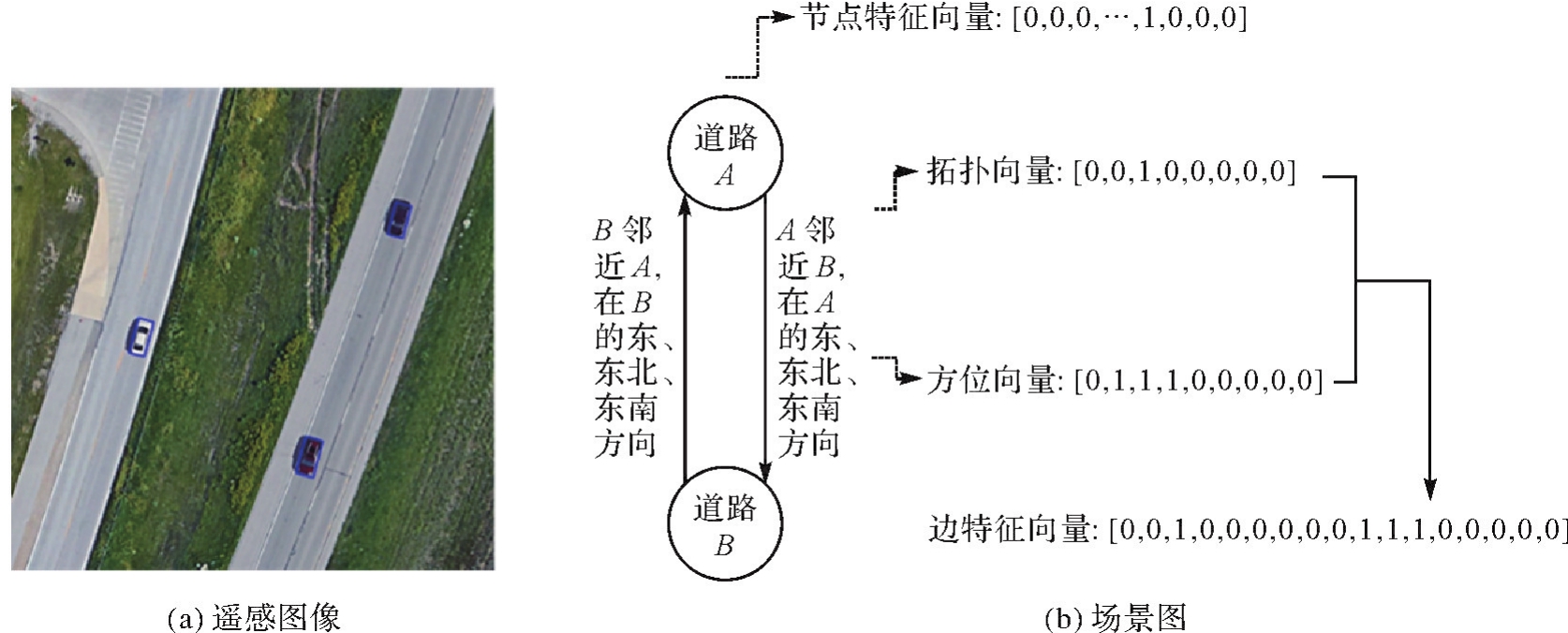

Fig. 3
Remote sensing scene graph retrieval"

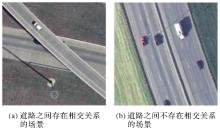
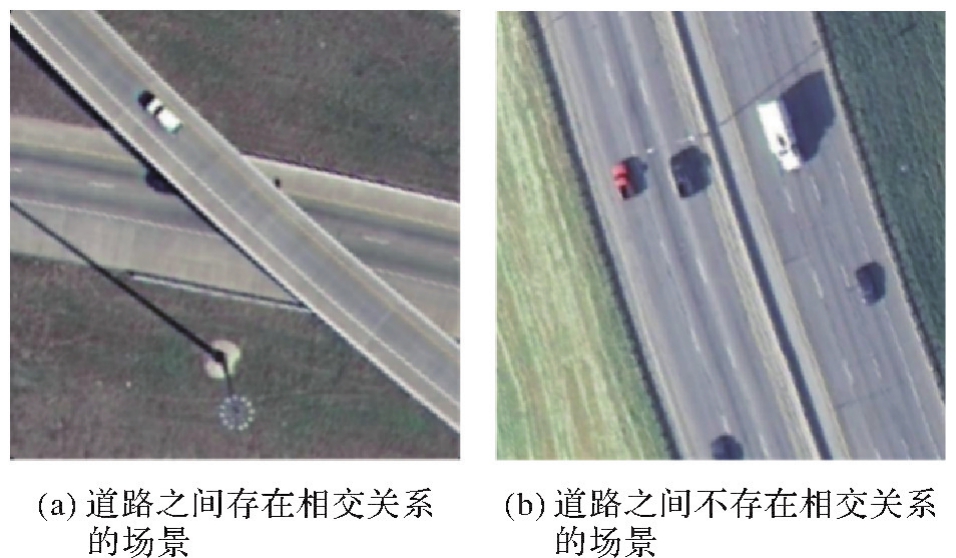
Fig. 4
Classification of road scene based on topological relationships"
Tab. 2
NDCG indicators for accuracy experiments of various methods in entity categories"
| 方法 | NDCG | ||
|---|---|---|---|
| K=5 | K=10 | K=20 | |
| Bihalf | 0.902 3 | 0.901 9 | 0.902 6 |
| Greedyhash | 0.889 1 | 0.889 2 | 0.889 6 |
| Simclr | 0.906 1 | 0.906 5 | 0.907 4 |
| Moco | 0.882 6 | 0.883 0 | 0.883 2 |
| CLIP-RS | 0.941 8 | 0.942 7 | 0.943 1 |
| 本文方法 | 0.915 6 | 0.913 1 | 0.908 6 |
Fig. 5
Scene retrieval query results in experiment 1"

Tab. 3
NDCG indicators of various methods in topological relationship accuracy experiments"
| 方法 | NDCG | ||
|---|---|---|---|
| K=5 | K=10 | K=20 | |
| Bihalf | 0.679 8 | 0.646 5 | 0.615 2 |
| Greedyhash | 0.700 5 | 0.663 4 | 0.637 7 |
| Simclr | 0.774 9 | 0.736 1 | 0.686 5 |
| Moco | 0.706 5 | 0.673 5 | 0.623 8 |
| CLIP-RS | 0.888 6 | 0.869 1 | 0.828 4 |
| 本文方法 | 0.983 8 | 0.980 3 | 0.969 4 |

Fig. 6
Scene retrieval query results in experiment 2"

Tab. 4
NDCG indicators of various methods in directional relationship accuracy experiments"
| 方法 | NDCG | ||
|---|---|---|---|
| K=5 | K=10 | K=20 | |
| Bihalf | 0.636 8 | 0.641 1 | 0.653 5 |
| Greedyhash | 0.624 6 | 0.632 9 | 0.645 7 |
| Simclr | 0.720 1 | 0.722 3 | 0.727 7 |
| Moco | 0.654 8 | 0.654 1 | 0.661 0 |
| CLIP-RS | 0.624 7 | 0.635 5 | 0.653 3 |
| 本文方法 | 0.801 2 | 0.805 5 | 0.804 5 |

Fig. 7
Scene retrieval query results in experiment 3"

Tab. 5
Data augmentation ablation experiment based on entity class retrieval accuracy"
| 方法 | NDCG | ||
|---|---|---|---|
| K=5 | K=10 | K=20 | |
| 本文方法(不进行特征级边数据增强) | 0.910 1 | 0.903 7 | 0.902 6 |
| 本文方法(不进行拓扑级边数据增强) | 0.913 5 | 0.909 7 | 0.905 7 |
| 本文方法(不进行特征级节点数据增强) | 0.881 9 | 0.881 8 | 0.884 4 |
| 本文方法 | 0.915 6 | 0.913 1 | 0.908 6 |
Tab. 6
Data augmentation ablation experiment based on topological relationship retrieval accuracy"
| 方法 | NDCG | ||
|---|---|---|---|
| K=5 | K=10 | K=20 | |
| 本文方法(不进行特征级边数据增强) | 0.964 1 | 0.957 9 | 0.946 9 |
| 本文方法(不进行拓扑级边数据增强) | 0.961 6 | 0.952 4 | 0.942 8 |
| 本文方法(不进行特征级节点数据增强) | 0.957 1 | 0.948 5 | 0.939 8 |
| 原始设计 | 0.983 8 | 0.980 3 | 0.969 4 |
Tab. 7
Data augmentation ablation experiment based on directional relationship retrieval accuracy"
| 方法 | NDCG | ||
|---|---|---|---|
| K=5 | K=10 | K=20 | |
| 本文方法(不进行特征级边数据增强) | 0.775 7 | 0.764 2 | 0.757 7 |
| 本文方法(不进行拓扑级边数据增强) | 0.770 3 | 0.770 7 | 0.768 4 |
| 本文方法(不进行特征级节点数据增强) | 0.778 1 | 0.768 4 | 0.766 3 |
| 原始设计 | 0.801 2 | 0.805 5 | 0.804 5 |
Tab. 8
Relationship feature vector ablation experiment based on topological relationship retrieval accuracy"
| 方法 | NDCG | ||
|---|---|---|---|
| K=5 | K=10 | K=20 | |
| 本文方法(忽略场景图中的关系特征) | 0.702 3 | 0.709 1 | 0.679 6 |
| 原始设计 | 0.983 8 | 0.980 3 | 0.969 4 |
Tab. 9
Relationship feature vector ablation experiment based on orientational relationship retrieval accuracy"
| 方法 | NDCG | ||
|---|---|---|---|
| K=5 | K=10 | K=20 | |
| 本文方法(忽略场景图中的关系特征) | 0.571 7 | 0.584 5 | 0.627 3 |
| 原始设计 | 0.801 2 | 0.805 5 | 0.804 5 |
| [1] | 张艺超. 面向遥感图像的深度哈希检索方法研究[D]. 西安: 西安光学精密机械研究所, 2023. |
| ZHANG Yichao. Research on deep hash retrieval methods for remote sensing images[D]. Xi'an: Xi'an Institute of Optics and Precision Mechanics, 2023. | |
| [2] | LI Y, MA J, ZHANG Y. Image retrieval from remote sensing big data: a survey[J]. Information Fusion, 2021, 67: 94-115. |
| [3] | 周维勋. 基于深度学习特征的遥感影像检索研究[D]. 武汉: 武汉大学, 2019. |
| ZHOU Weixun. Research on remote sensing image retrieval based on deep learning features[D]. Wuhan: Wuhan University, 2019. | |
| [4] | 周玉琢. 基于多注意力机制和语义对齐的跨模态遥感图文检索研究[D]. 武汉: 华中科技大学, 2022. |
| ZHOU Yuzhuo. Research on cross modal remote sensing image and text retrieval based on multi attention mechanism and semantic alignment[D]. Wuhan: Huazhong University of Science and Technology, 2022. | |
| [5] | CAO M, LI S, Li J, et al. Image-text retrieval: a survey on recent research and development[J/OL]. [2022-12-16]. https://arxiv.org/abs/2203.14713. |
| [6] | FAN D, DONG Y, ZHANG Y. Satellite image matching method based on deep convolutional neural network[J]. Journal of Geodesy and Geoinformation Science, 2019, 2(2): 90. |
| [7] | 李彦胜, 张永军. 耦合知识图谱和深度学习的新一代遥感影像解译范式[J]. 武汉大学学报(信息科学版), 2022, 47(8): 1176-1190. |
| LI Yansheng, ZHANG Yongjun. A new paradigm of remote sensing image interpretation by coupling knowledge graph and deep learning[J]. Geomatics and Information Science of Wuhan University, 2022, 47(8): 1176-1190. | |
| [8] | JOHNSON J, KRISHNA R, STARK M, et al. Image retrieval using scene graphs[C]//Proceedings of 2015 IEEE Conference on Computer Vision and Pattern Recognition. Los Alamitos: IEEE Computer Society, 2015: 3668-3678. |
| [9] | YOON S, KANG W Y, JEON S, et al. Image-to-image retrieval by learning similarity between scene graphs[C]//Proceedings of 2021 AAAI Conference on Artificial Intelligence, 2021, 35(12): 10718-10726. |
| [10] | 王旭东. 基于图理论的场景图检索方法研究与实现[D]. 西安: 西安电子科技大学, 2021. |
| WANG Xudong. Research and implementation of scene image retrieval method based on graph theory[D]. Xi'an: Xidian University, 2021. | |
| [11] | LIN Z, ZHU F, KONG Y, et al. SRSG and S2SG: a model and a dataset for scene graph generation of remote sensing images from segmentation results[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1-11. |
| [12] | LI P, ZHANG D, WULAMU A, et al. Semantic relation model and dataset for remote sensing scene understanding[J]. ISPRS International Journal of Geo-Information, 2021, 10(7): 488. |
| [13] | LU X, WANG B, ZHENG X, et al. Exploring models and data for remote sensing image caption generation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 56(4): 2183-2195. |
| [14] | ZHU G, ZHANG L, JIANG Y, et al. Scene graph generation: a comprehensive survey[J/OL]. [2022-12-20]. https://arxiv.org/abs/2201.00443. |
| [15] | ZHOU J, XIE C, GONG S, et al. Data augmentation on graphs: a technical survey[J/OL]. [2022-11-22]. https://arxiv.org/abs/2212.09970. |
| [16] | CHENG G, WANG J, LI K, et al. Anchor-free oriented proposal generator for object detection[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1-11. |
| [17] | XIA G S, HU J, HU F, et al. AID: a benchmark data set for performance evaluation of aerial scene classification[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(7): 3965-3981. |
| [18] | YANG Y, NEWSAM S. Bag-of-visual-words and spatial extensions for land-use classification[C]//Proceedings of the 18th SIGSPATIAL international conference on advances in geographic information systems. New York: Association for Computing Machinery, 2010: 270-279. |
| [19] | EGENHOFER M J, FRANZOSA R D. Point-set topological spatial relations[J]. International Journal of Geographical Information System, 1991, 5(2): 161-174. |
| [20] |
王大力, 童晓冲, 孟丽, 等. 文本中空间信息的结构化建模与语义定位[J]. 测绘学报, 2023, 52(8): 1398-1410. DOI:.
doi: 10.11947/j.AGCS.2023.20220066 |
|
WANG Dali, TONG Xiaochong, MENG Li, et al. Structural modeling of spatial information in texts and semantic localization[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(8): 1398-1410. DOI:.
doi: 10.11947/j.AGCS.2023.20220066 |
|
| [21] | WANG D, TONG X, DAI C, et al. Voxel modeling and association of ubiquitous spatiotemporal information in natural language texts[J]. International Journal of Digital Earth, 2023, 16(1): 868-890. |
| [22] | CHEN K, LIU C, CHEN H, et al. RSPrompter: learning to prompt for remote sensing instance segmentation based on visual foundation model[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024. |
| [23] | RADFORD A, KIM J W, HALLACY C, et al. Learning transferable visual models from natural language supervision[C]//Proceedings of 2021 International Conference on Machine Learning. Cambridge: JMLR, 2021: 8748-8763. |
| [24] | CHEN T, KORNBLITH S, NOROUZI M, et al. A simple framework for contrastive learning of visual representations[C]//Proceedings of 2020 International Conference on Machine Learning. Cambridge: JMLR, 2020: 1597-1607. |
| [25] | LI Y, GU C, DULLIEN T, et al. Graph matching networks for learning the similarity of graph structured objects[C]//Proceedings of 2019 International Conference on Machine Learning. Cambridge: JMLR, 2019: 3835-3845. |
| [26] | LI Y, TARLOW D, BROCKSCHMIDT M, et al. Gated graph sequence neural networks[[J/OL]. [2022-12-23]. https://arxiv.org/abs/1511.05493. |
| [27] | LI Y, VAN GEMERT J. Deep unsupervised image hashing by maximizing bit entropy[C]//Proceedings of 2021 AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2021, 35(3): 2002-2010. |
| [28] | SU S, ZHANG C, HAN K, et al. Greedy Hash: towards fast optimization for accurate Hash coding in CNN[J]. Advances in Neural Information Processing Systems, 2018, 31. |
| [29] | HE K, FAN H, WU Y, et al. Momentum contrast for unsupervised visual representation learning[C]//Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Los Alamitos: IEEE Computer Society, 2020: 9729-9738. |
| [30] | DJOUFACK B L. CLIP-RS: a cross-modal remote sensing image retrieval based on CLIP, a Northern Virginia case study[D]. Blacksburg: Virginia Tech., 2022. |
| [31] | WANG Y, WANG L, LI Y, et al. A theoretical analysis of NDCG type ranking measures[C]//Proceedings of 2013 Conference on Learning Theory. Cambridge: JMLR, 2013: 25-54. |
| [1] | Weilian LI, Qingqing RAN, Pei DANG, Jun ZHU, Qing ZHU, Heng ZHANG. A coupled LLMs-KG method for cascading flood vulnerability analysis of underground station facilities [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(1): 154-168. |
| [2] | Haoyu WU, Qing ZHU, Yulin DING, Liu BAO, Li LIU. High-precision digital twin modeling of tunnel surrounding rock driven by data model knowledge collaboration [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1893-1906. |
| [3] | Yan SHI, Da WANG, Min DENG, Xuexi YANG. Spatio-temporal anomaly detection: connotation transformation and implementation path from data-driven to knowledge-driven modeling [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(8): 1493-1504. |
| [4] | Bo KONG, Tinghua AI, Min YANG, Hao WU, Huafei YU, Tianyuan XIAO. Identification of loess landform types jointly affected by contour morphological knowledge and the graph neural network [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1154-1164. |
| [5] | Yansheng LI, Minlang WU, Yongjun ZHANG. Knowledge graph-guided deep network for high-resolution remote sensing image scene classification [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(4): 677-688. |
| [6] | Jia LI, Jing LI, Haiyan LIU, Chuanwei LU, Xiaohui CHEN, Junnan LIU, Wen SHI. Trajectory prediction enhanced by geographic knowledge graph and multi-spatio temporal constraints [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(10): 2021-2033. |
| [7] | WEI Zhiwei, XIAO Yi, TONG Ying, XU Wenjia, WANG Yang. Linear building pattern recognition via spatial knowledge graph [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(8): 1355-1363. |
| [8] | SHEN Li, XU Zhu, LI Zhilin, LIU Wanzeng, CUI Bingliang. From geographic information service to geographic knowledge service: research issues and development roadmap [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(9): 1194-1202. |
| [9] | LIU Wanzeng, CHEN Jun, ZHAI Xi, LI Ran, WANG Xinpeng, ZHAO Yong, ZHU Xiuli, XU Zhu, ZHAO Tingting, PENG Yunlu, SHEN Li. Research progress and application of spatiotemporal knowledge center [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(9): 1183-1193. |
| [10] | ZHU Qing, ZENG Haowei, DING Yulin, XIE Xiao, LIU Fei, ZHANG Liguo, LI Haifeng, HU Han, ZHANG Junxiao, CHEN Li, CHEN Lin, ZHANG Pengcheng, HE Huagui. A review of major potential landslide hazards analysis [J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(12): 1551-1561. |
| [11] | JIANG Bingchuan, WAN Gang, XU Jian, LI Feng, WEN Huiqi. Geographic Knowledge Graph Building Extracted from Multi-sourced Heterogeneous Data [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(8): 1051-1061. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||