

Acta Geodaetica et Cartographica Sinica ›› 2026, Vol. 55 ›› Issue (5): 909-926.doi: 10.11947/j.AGCS.2026.20250382
• Photogrammetry and Remote Sensing • Previous Articles Next Articles
Zhengwen WANG1( ), Juntao YANG1(), Zhizhong KANG2, Yutao ZHANG1, Xuzhe WANG1, Xue ZHANG3
), Juntao YANG1(), Zhizhong KANG2, Yutao ZHANG1, Xuzhe WANG1, Xue ZHANG3
Received:2025-09-15
Revised:2026-04-20
Online:2026-06-23
Published:2026-06-23
Contact:
Juntao YANG
E-mail:879584130@qq.com;jtyang@sdust.edu.cn
About author:WANG Zhengwen (2000—), male, postgraduate, majors in LiDAR remote sensing. E-mail: 879584130@qq.com
Supported by:CLC Number:
Zhengwen WANG, Juntao YANG, Zhizhong KANG, Yutao ZHANG, Xuzhe WANG, Xue ZHANG. A semantic-assisted method for constructing multi-floor indoor spatial topology models from 3D point clouds[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 909-926.

Fig. 1
Technical route"
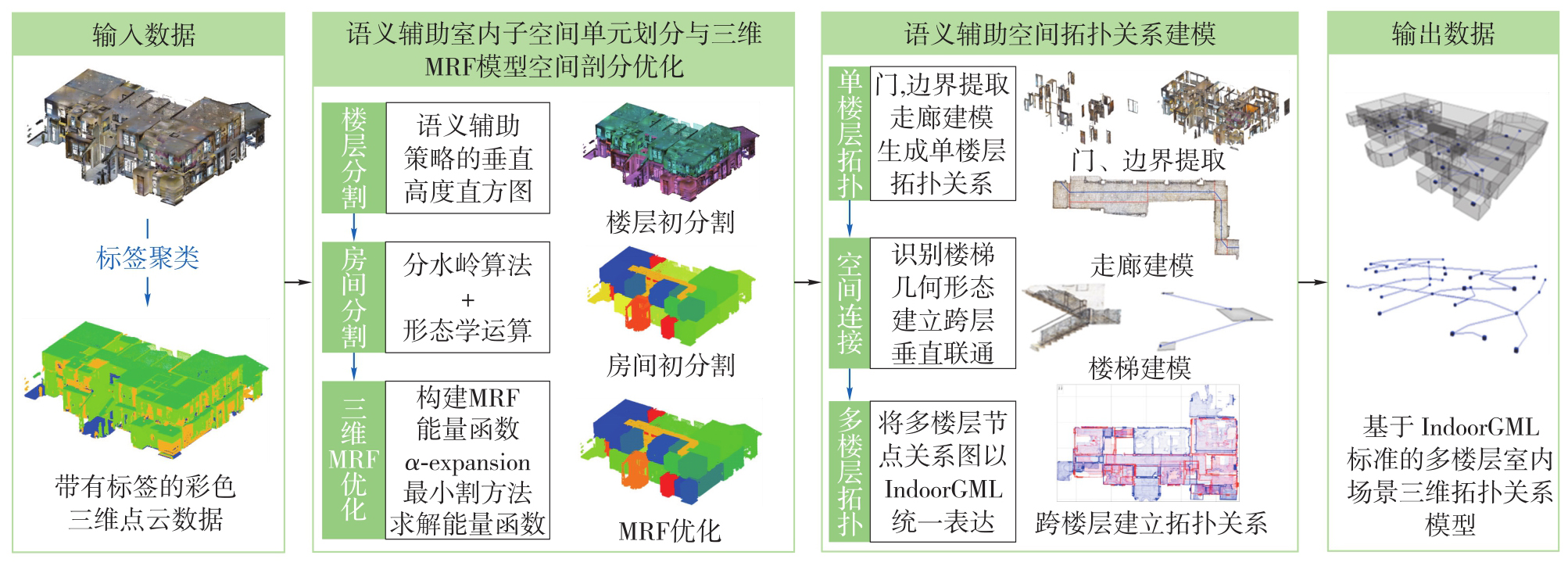

Fig. 2
Comparison between the traditional height histogram and the semantic-assisted height histograms"
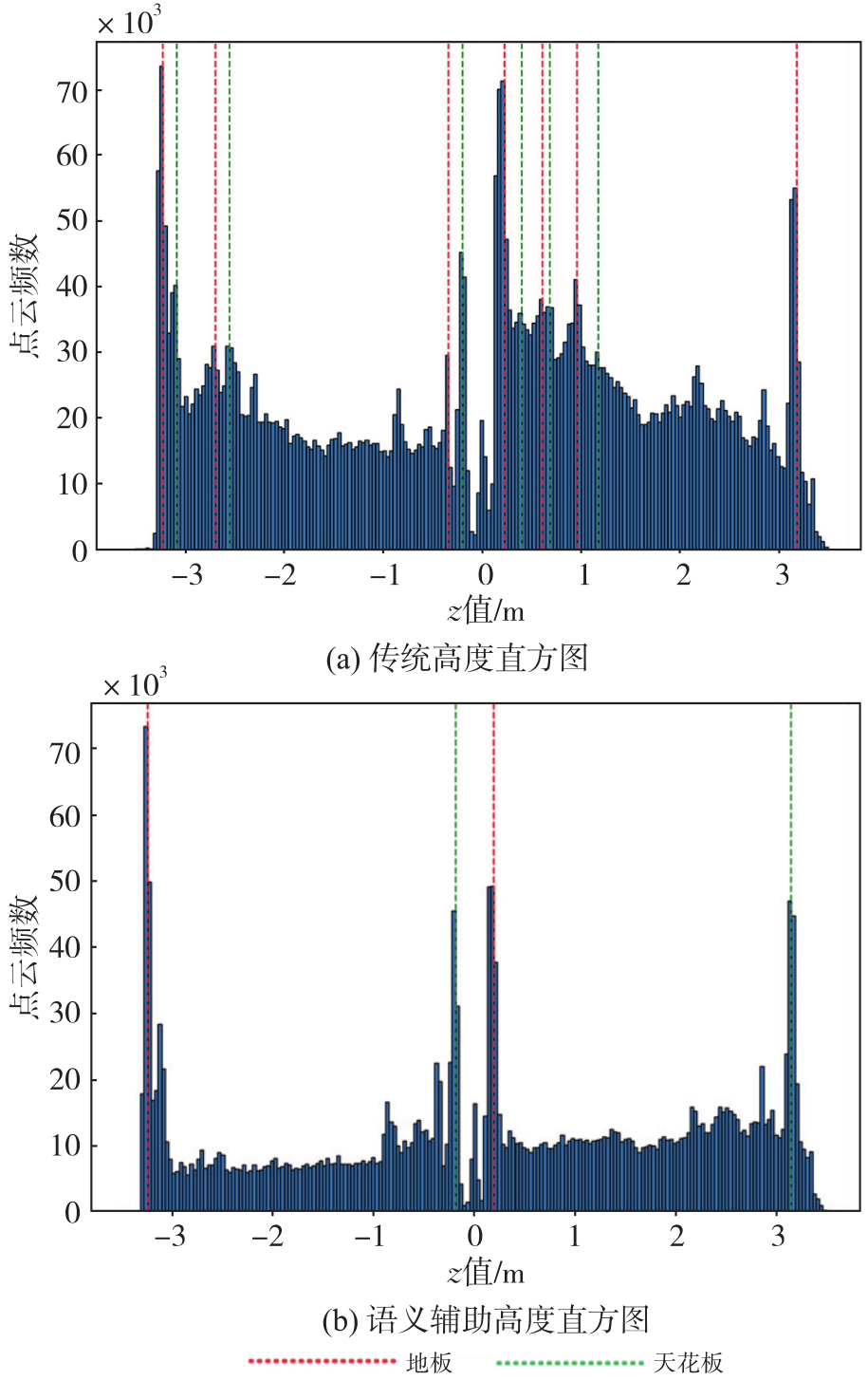
Fig. 3
Room segmentation"
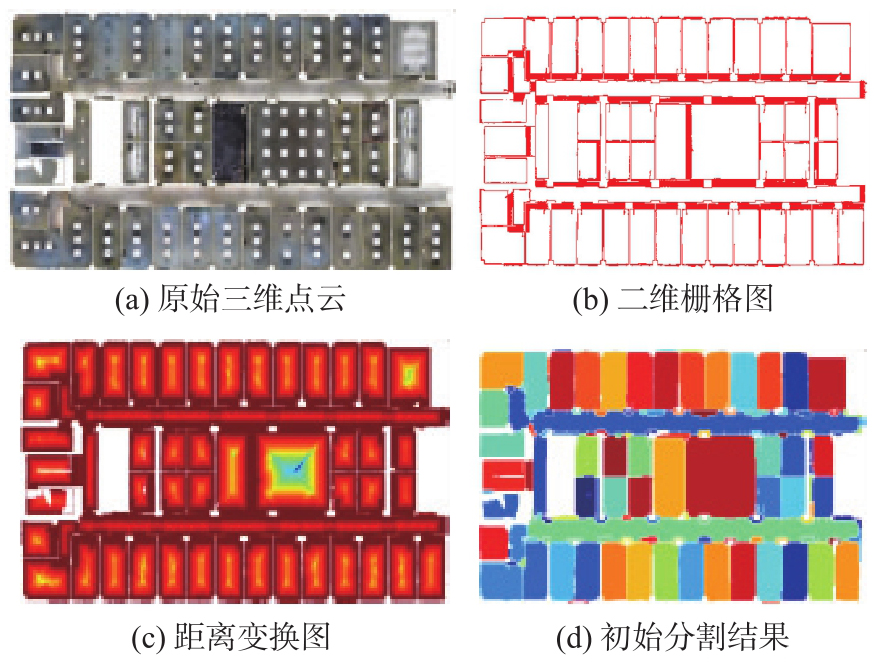

Fig. 4
The room segmentation refinement through morphological operations"
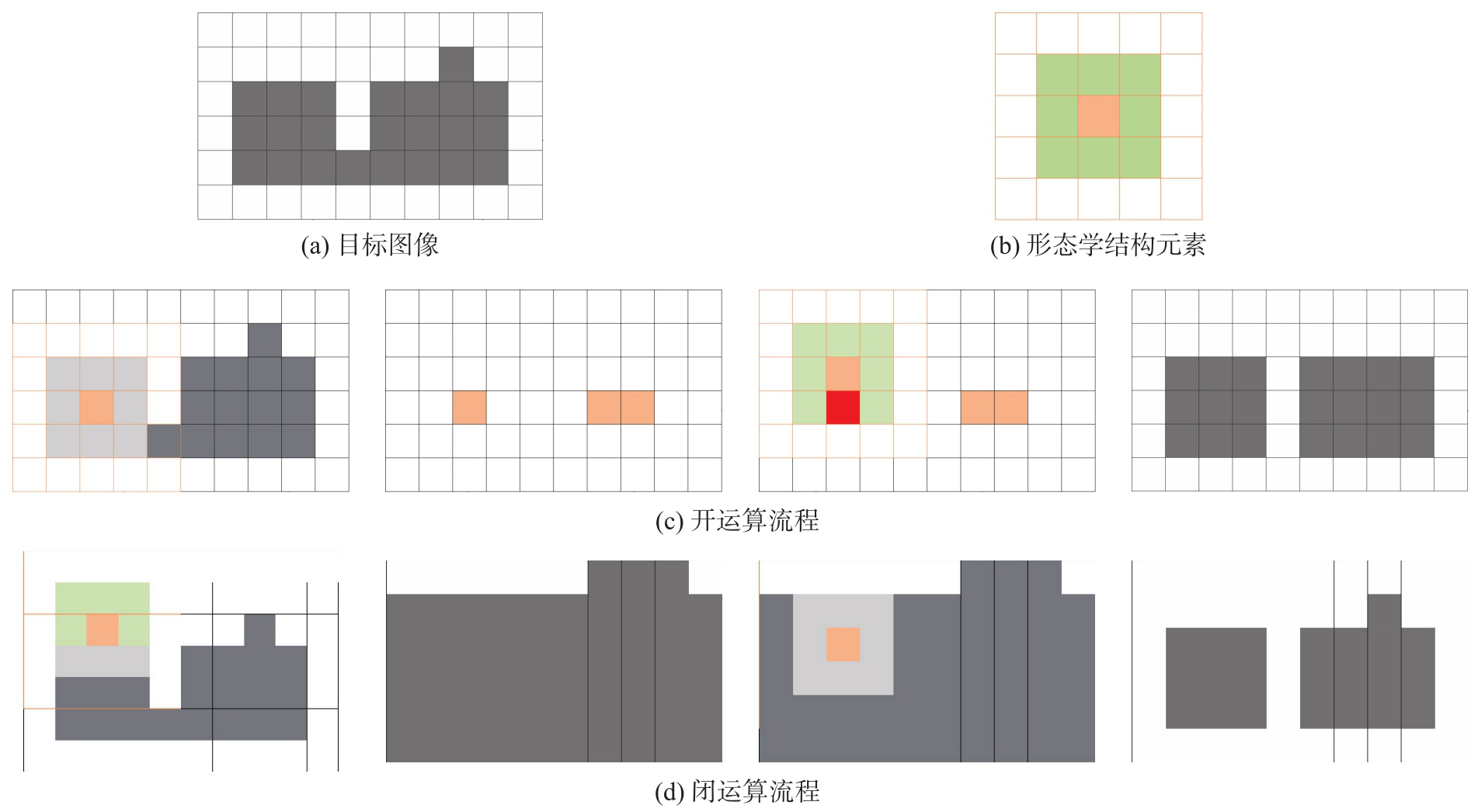

Fig. 5
3D MRF model construction"
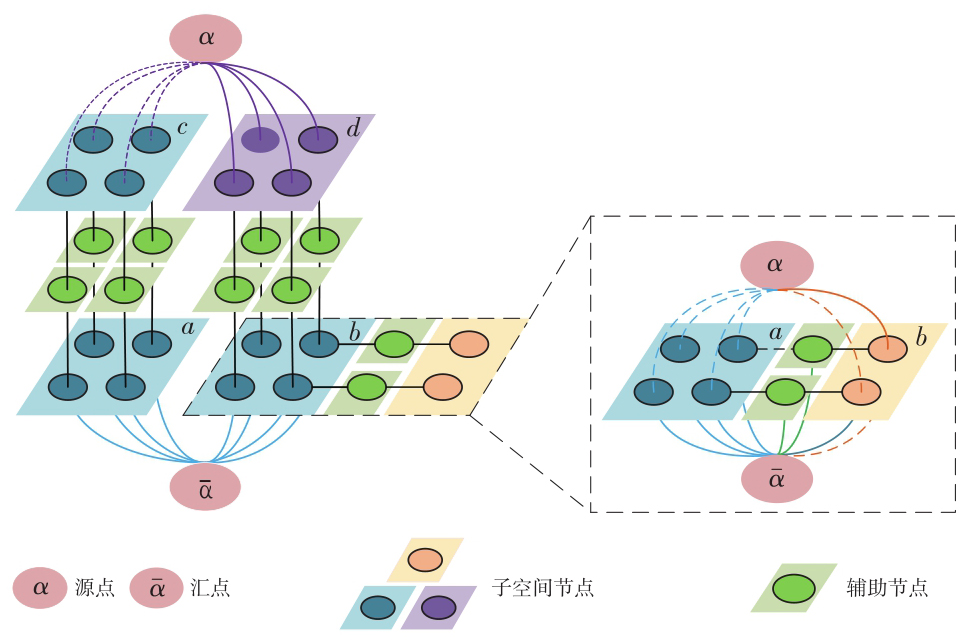

Fig. 6
The α-expansion minimum cut (C-cut) method"
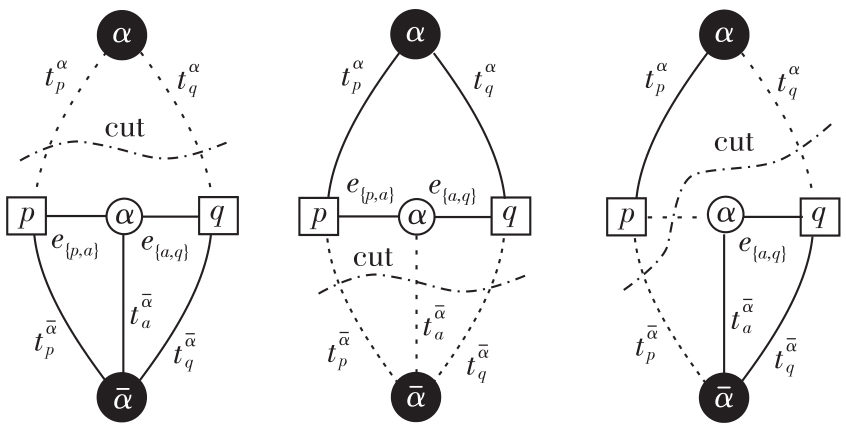

Fig. 7
Extraction of room boundaries and doors for indoor space topological modeling"
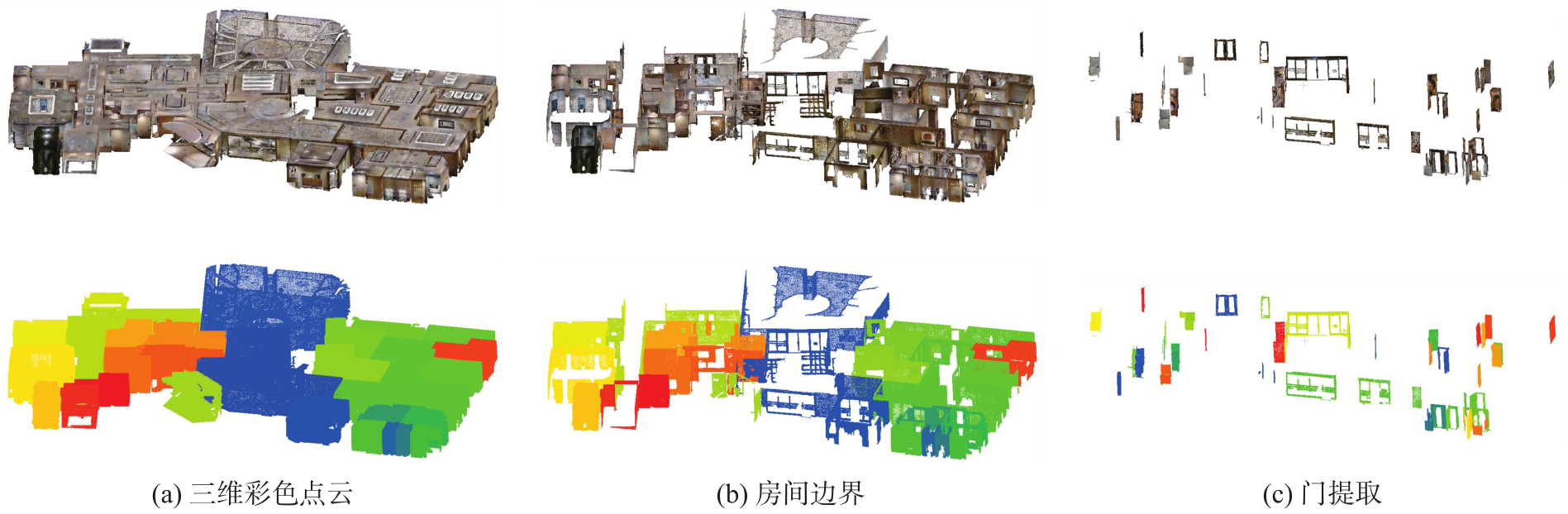

Fig. 8
Comparative of conventional doors versus virtual doors"
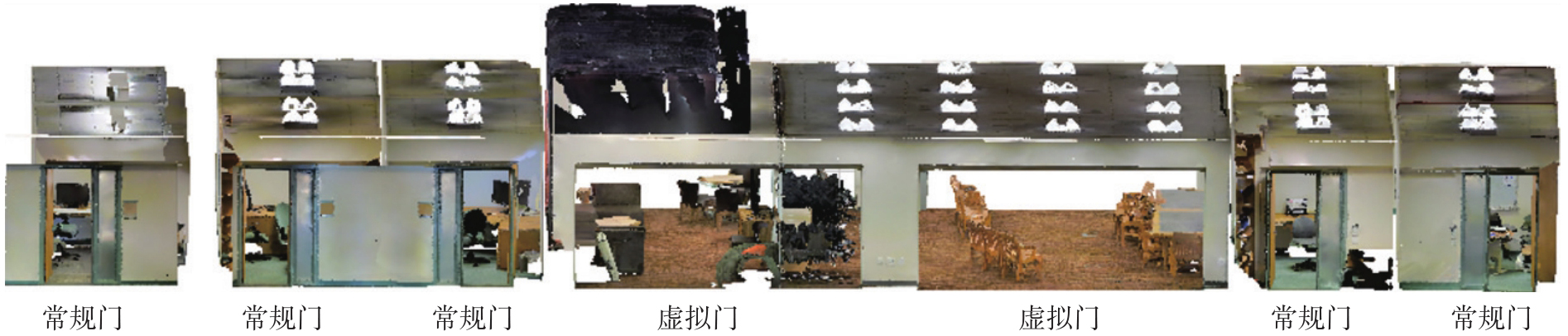
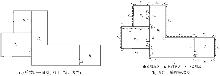
Fig. 9
The wall corners and wall lines on a single floor"
Tab. 1
Information of rooms"
| 房间 | 墙线 | 坐标 | 门数 | 房间类型 |
|---|---|---|---|---|
| R0 | (E0,E3,E8,E10,E16,E14,E7,E2) |  | 3 | 走廊 |
| R1 | (E1,E4,E9,E3) |  | 1 | 普通房间 |
| R2 | (E5,E7,E12,E11,E6) |  | 1 | 普通房间 |
| R3 | (E12,E14,E15,E13) |  | 1 | 普通房间 |
Fig. 10
The corridor model partitioning"
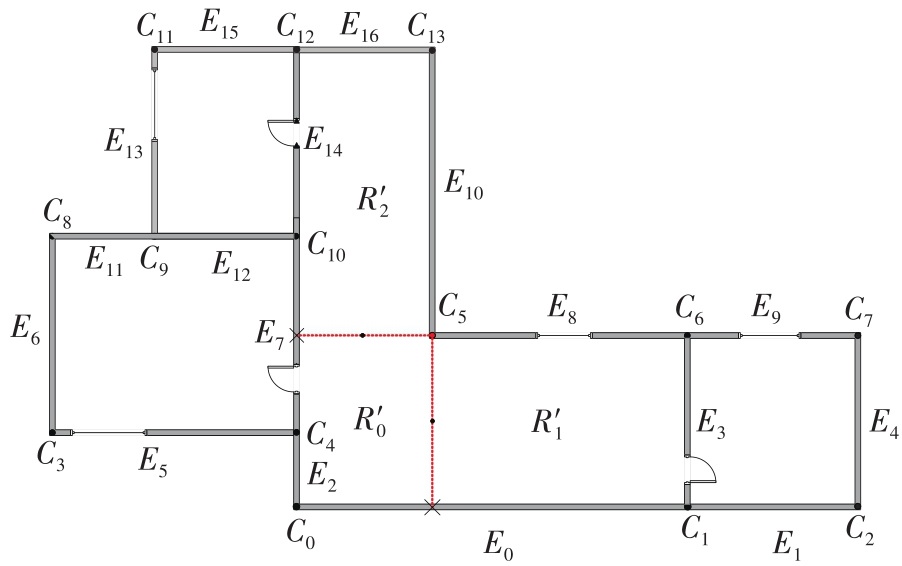

Fig. 11
The corridor topological relationships"
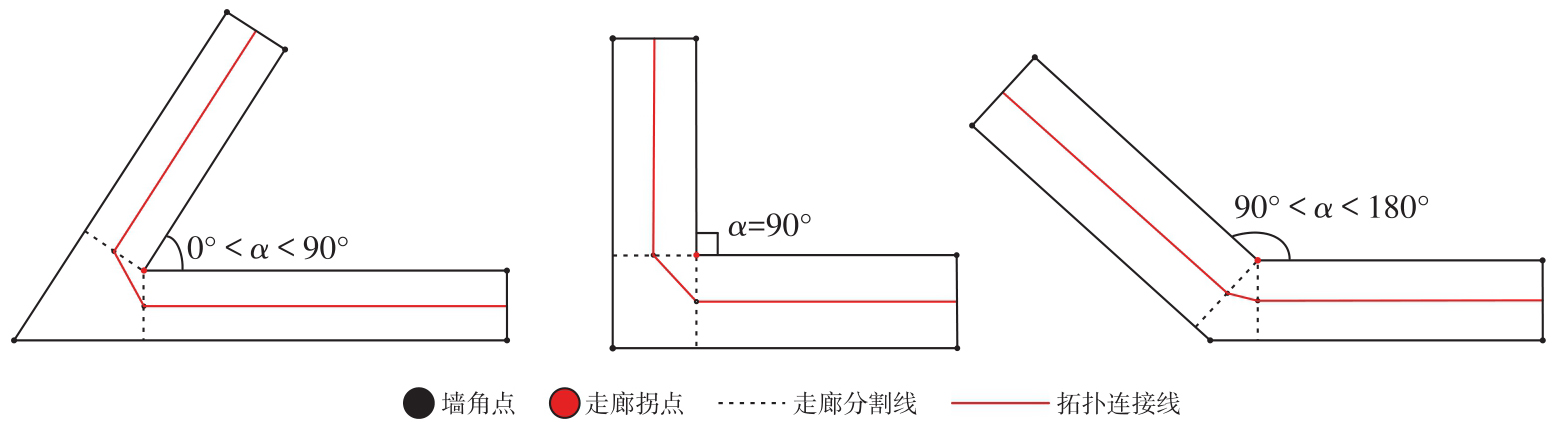

Fig. 12
Detailed comparison of staircase models"
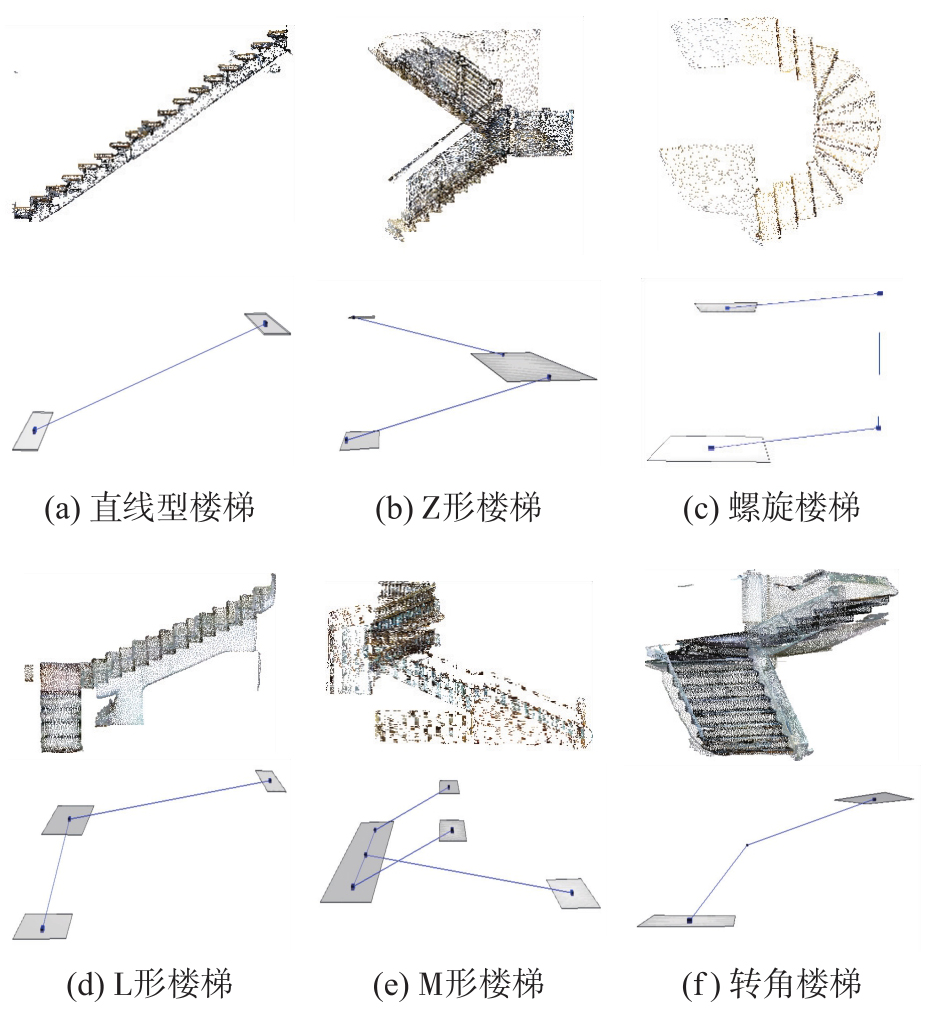

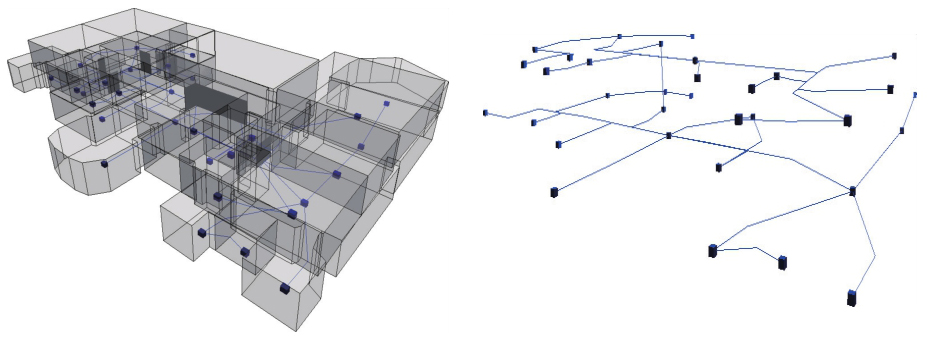
Fig. 13
Multi-floor topological relationships"
Tab. 2
Scene information of the S3DIS dataset"
| 场景 | 点云数量 | 面积/m2 | 房间数 | 窗户数 | 门数 |
|---|---|---|---|---|---|
| 区域1 | 4.402 6×107 | 24.7×48.3 | 41 | 31 | 47 |
| 区域2 | 4.731 5×107 | 30.9×51.3 | 40 | 8 | 53 |
| 区域3 | 1.866 2×107 | 29.3×25.7 | 23 | 8 | 22 |
| 区域4 | 4.347 0×107 | 47.3×26.6 | 49 | 31 | 59 |
| 区域5 | 7.864 9×107 | 66.4×45.0 | 68 | 51 | 75 |
| 区域6 | 4.135 3×107 | 23.2×45.4 | 48 | 31 | 50 |
Tab. 3
Scene information of the Matterport 3D dataset"
| 场景 | 点云数量 | 面积/m2 | 房间数 | 窗户数 | 门数 |
|---|---|---|---|---|---|
| 7y3 | 6.199×106 | 22.45×14.40 | 36 | 37 | 41 |
| D7n | 8.918×106 | 27.18×35.10 | 43 | 36 | 44 |
| px4 | 9.321×106 | 22.91×41.89 | 49 | 65 | 45 |
| q9v | 4.897×106 | 27.46×18.29 | 22 | 11 | 30 |
| e9z | 4.553×106 | 17.54×14.87 | 30 | 28 | 22 |
| zsn | 3.764×106 | 22.41×13.45 | 20 | 22 | 15 |
| pa4 | 8.800×106 | 27.84×30.30 | 47 | 47 | 45 |
| Jmb | 4.126×106 | 16.08×12.39 | 22 | 28 | 15 |
| aay | 4.003×106 | 21.87×11.13 | 18 | 17 | 22 |
| QUC | 7.692×106 | 29.09×44.74 | 37 | 59 | 53 |
| 5Lp | 5.245×106 | 23.98×19.48 | 30 | 12 | 19 |
| qoi | 4.471×106 | 12.58×25.28 | 23 | 24 | 29 |
| VFu | 6.704×106 | 31.04×35.82 | 35 | 17 | 49 |
Tab. 4
Comparison analysis of floor segmentation results with semantically augmented height histograms and MRF-based optimization"
| 场景 | 楼层 | 语义辅助高度直方图结果 | MRF优化结果 | ||||
|---|---|---|---|---|---|---|---|
| 召回率 | 交并比 | 精确率 | 召回率 | 交并比 | 精确率 | ||
| e9z | 1层 | 66.52 | 66.521 | 00.00 | 96.08 | 96.08 | 100.00 |
| 2层 | 99.92 | 92.87 | 92.93 | 99.93 | 98.52 | 98.59 | |
| 3层 | 99.04 | 98.96 | 99.92 | 99.04 | 98.96 | 99.94 | |
| Jmb | 1层 | 90.78 | 90.32 | 99.45 | 99.22 | 98.67 | 99.45 |
| 2层 | 99.31 | 88.19 | 88.73 | 99.38 | 98.52 | 99.13 | |
| pa4 | 1层 | 99.93 | 98.36 | 98.43 | 99.93 | 98.36 | 98.43 |
| 2层 | 97.52 | 92.42 | 94.65 | 97.13 | 96.15 | 98.95 | |
| 3层 | 95.75 | 92.48 | 96.44 | 98.99 | 97.53 | 98.52 | |
| 4层 | 81.41 | 80.81 | 99.10 | 96.74 | 95.02 | 98.17 | |
| qoi | 1层 | 99.91 | 94.51 | 94.59 | 99.86 | 98.57 | 98.70 |
| 2层 | 95.50 | 95.43 | 99.92 | 98.88 | 98.76 | 99.88 | |
| VFu | 1层 | 99.92 | 98.93 | 99.01 | 99.92 | 98.93 | 99.01 |
| 2层 | 99.62 | 93.46 | 93.79 | 99.39 | 97.79 | 98.38 | |
| 3层 | 91.01 | 91.01 | 100.00 | 97.51 | 97.13 | 99.61 | |
| 平均值 | 96.95 | 94.57 | 97.51 | 97.87 | 96.05 | 98.09 | |
Fig. 14
Comparison of floor segmentation before and after MRF model optimization"

Fig. 15
Comparison of room segmentation results on the Matterport 3D dataset"
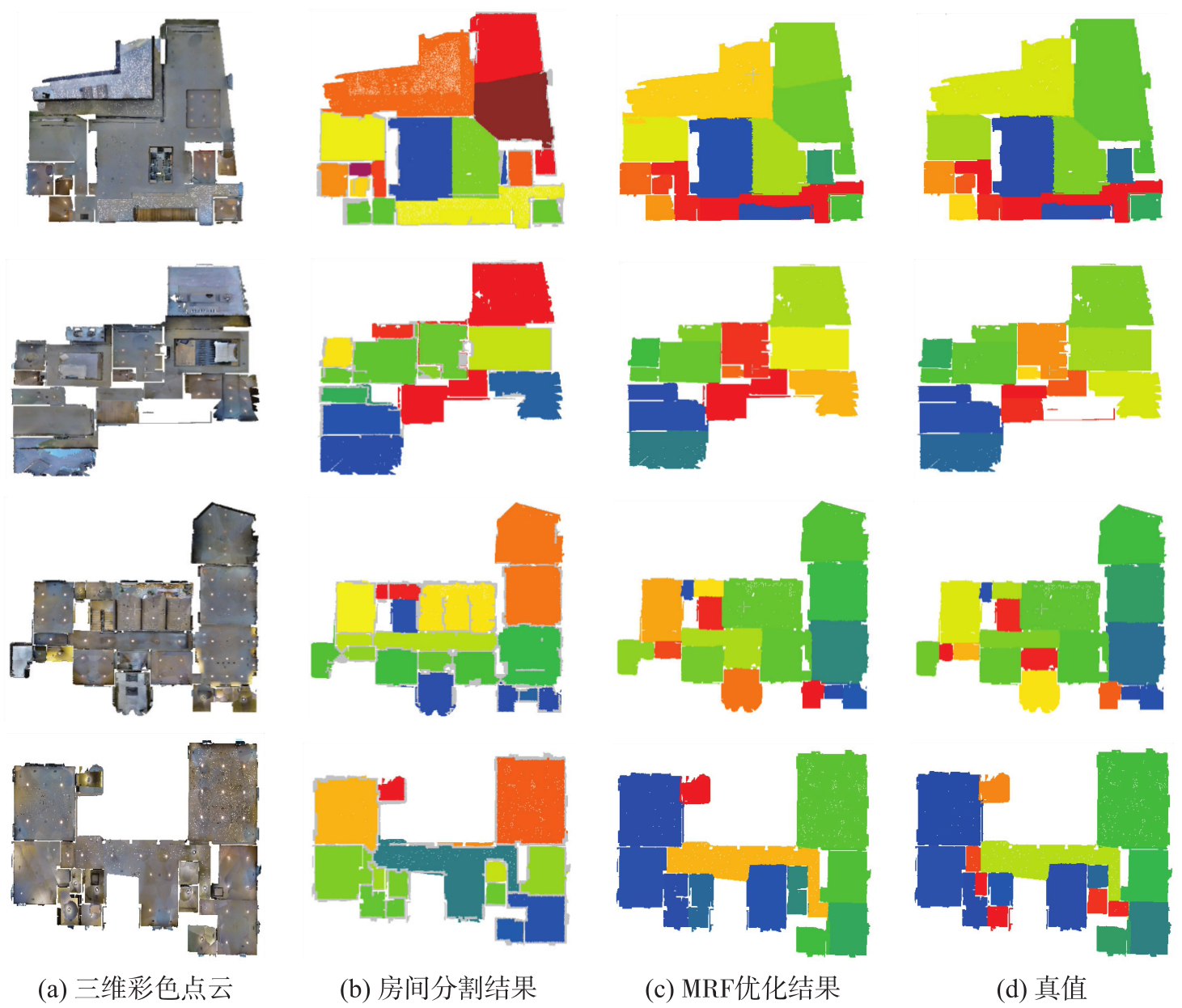
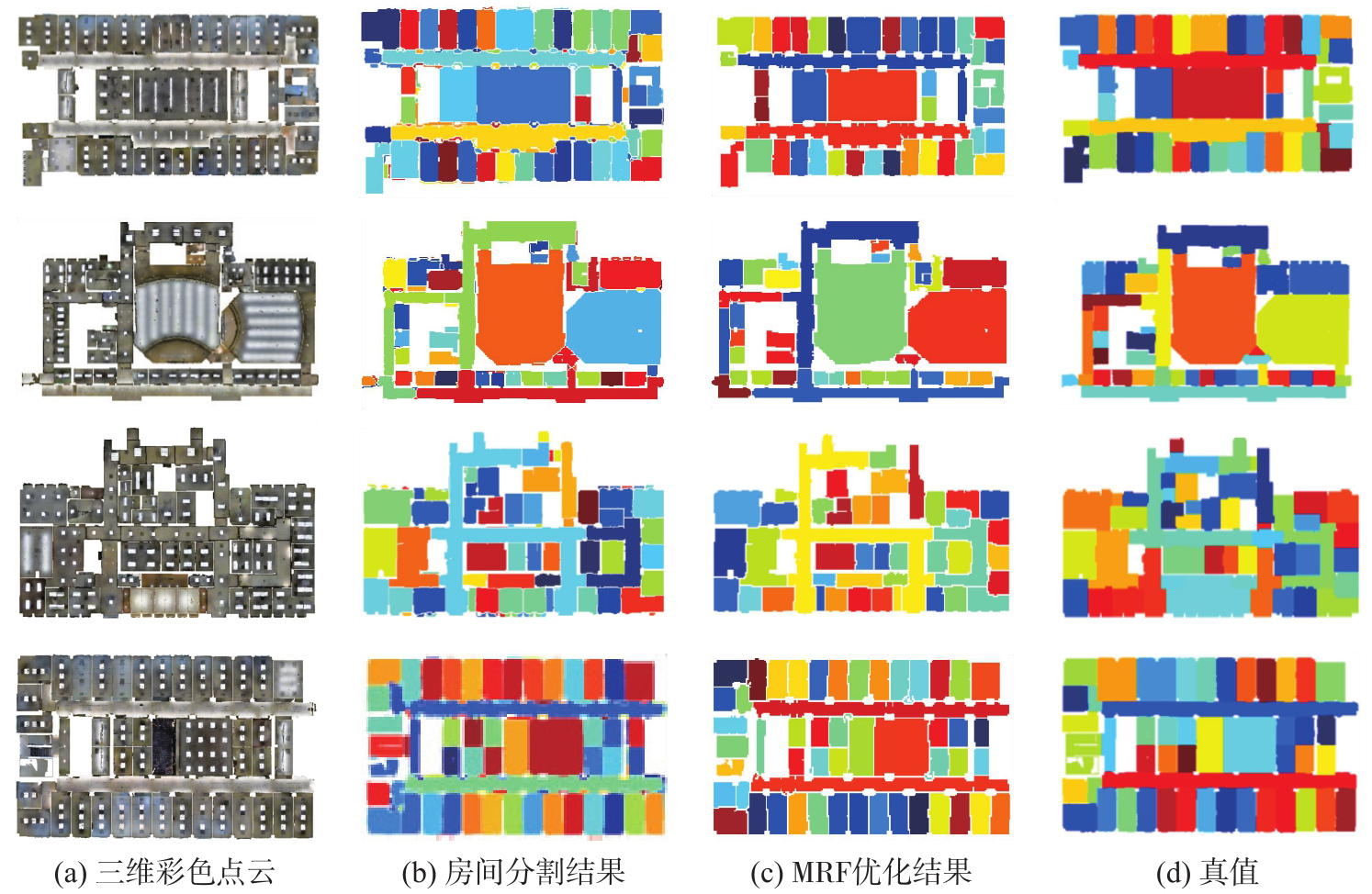
Fig. 16
Comparison of room segmentation results on the S3DIS dataset"
Tab. 5
Quantitative assessment of room segmentation performance on the Matterport 3D dataset"
| 场景 | 楼层 | 语义辅助直方图结果 | MRF优化结果 | ||||
|---|---|---|---|---|---|---|---|
| 召回率 | 交并比 | 精确率 | 召回率 | 交并比 | 精确率 | ||
| e9z | 1层 | 81.82 | 81.82 | 100.00 | 90.91 | 90.91 | 100.00 |
| 2层 | 72.73 | 72.73 | 100.00 | 90.91 | 90.91 | 100.00 | |
| 3层 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | |
| Jmb | 1层 | 75.00 | 69.23 | 90.00 | 91.67 | 91.67 | 100.00 |
| 2层 | 70.00 | 63.64 | 87.50 | 90.00 | 90.00 | 100.00 | |
| pa4 | 1层 | 66.67 | 66.67 | 100.00 | 83.33 | 83.33 | 100.00 |
| 2层 | 73.68 | 63.64 | 82.35 | 89.47 | 80.95 | 89.47 | |
| 3层 | 77.78 | 70.00 | 87.50 | 88.89 | 88.89 | 100.00 | |
| 4层 | 100.00 | 80.00 | 80.00 | 100.00 | 100.00 | 100.00 | |
| qoi | 1层 | 90.00 | 90.00 | 100.00 | 90.00 | 90.00 | 100.00 |
| 2层 | 92.31 | 92.31 | 100.00 | 84.62 | 84.62 | 100.00 | |
| VFu | 1层 | 81.82 | 69.23 | 81.82 | 81.82 | 75.00 | 90.00 |
| 2层 | 80.00 | 75.00 | 92.31 | 84.62 | 84.62 | 100.00 | |
| 3层 | 88.89 | 80.00 | 88.89 | 88.89 | 80.00 | 88.89 | |
| 平均值 | 87.85 | 83.02 | 93.45 | 89.87 | 85.66 | 94.81 | |
Tab. 6
Quantitative assessment of room segmentation performance on the S3DIS dataset"
| 场景 | 房间初分割结果 | MRF优化结果 | ||||
|---|---|---|---|---|---|---|
| 召回率 | 交并比 | 精确率 | 召回率 | 交并比 | 精确率 | |
| 区域1 | 82.93 | 75.56 | 89.47 | 90.26 | 86.05 | 94.87 |
| 区域2 | 77.50 | 72.09 | 91.18 | 85.00 | 82.93 | 97.14 |
| 区域3 | 78.26 | 66.67 | 81.82 | 86.96 | 80.00 | 90.91 |
| 区域4 | 77.55 | 71.70 | 90.48 | 83.67 | 78.84 | 93.18 |
| 区域5 | 85.29 | 81.69 | 95.08 | 88.24 | 84.51 | 95.24 |
| 区域6 | 83.33 | 76.92 | 90.91 | 89.36 | 85.71 | 95.46 |
| 平均值 | 81.41 | 75.26 | 90.87 | 87.31 | 83.27 | 94.74 |
Tab. 7
Performances comparison of room segmentation methods on the Matterport 3D dataset"
| 模型 | 精确率 | 召回率 | 平均交并比 |
|---|---|---|---|
| Hydia | 86.18 | 77.55 | — |
| HOV-SG | 84.10 | 83.59 | — |
| 本文模型(优化前) | 93.78 | 87.85 | 83.02 |
| 本文模型(优化后) | 94.81 | 89.87 | 85.66 |
Fig. 17
Detailed comparison of single-floor node relationships on the Matterport 3D dataset"
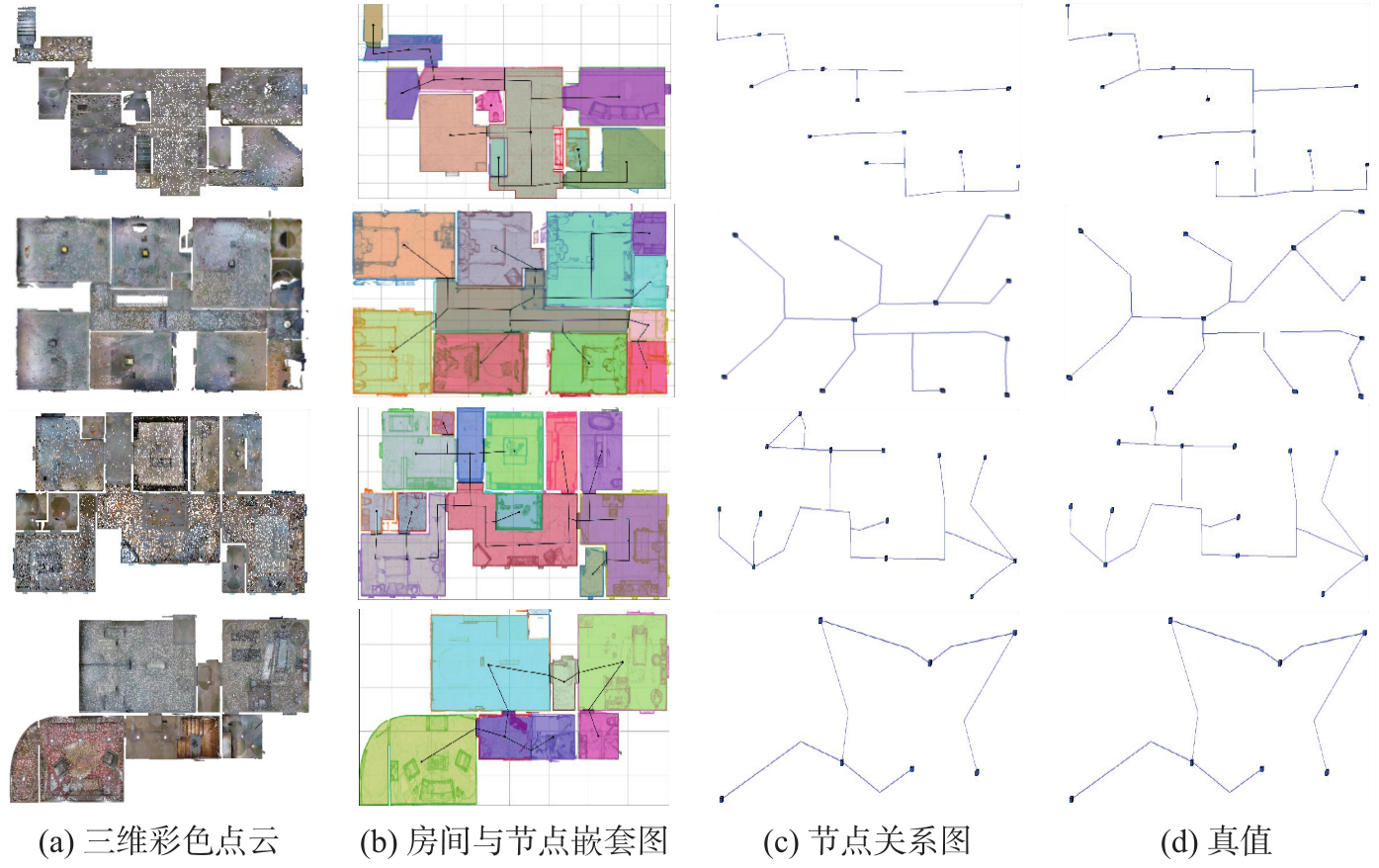
Fig. 18
Detailed comparison of single-floor node relationships on the S3DIS dataset"

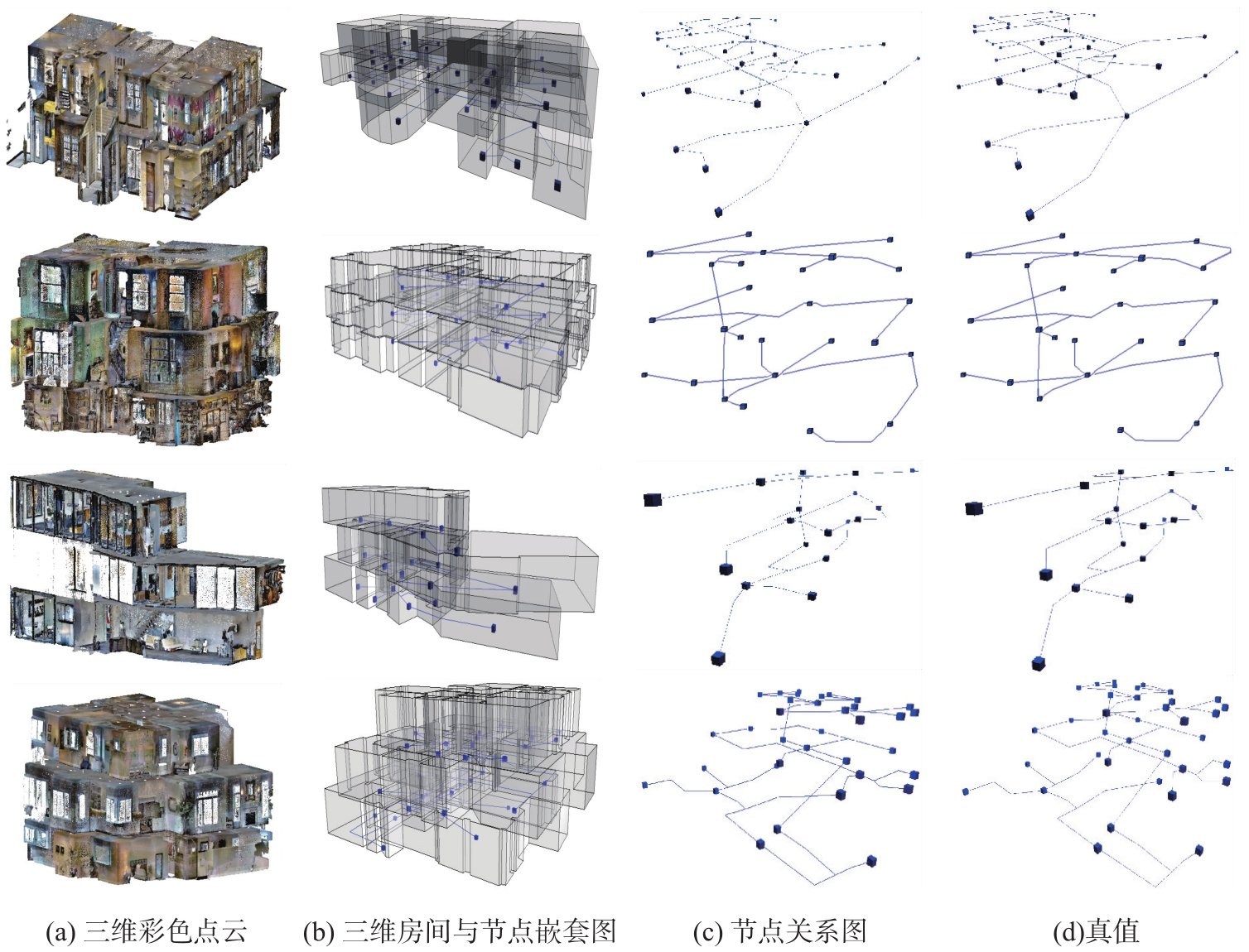
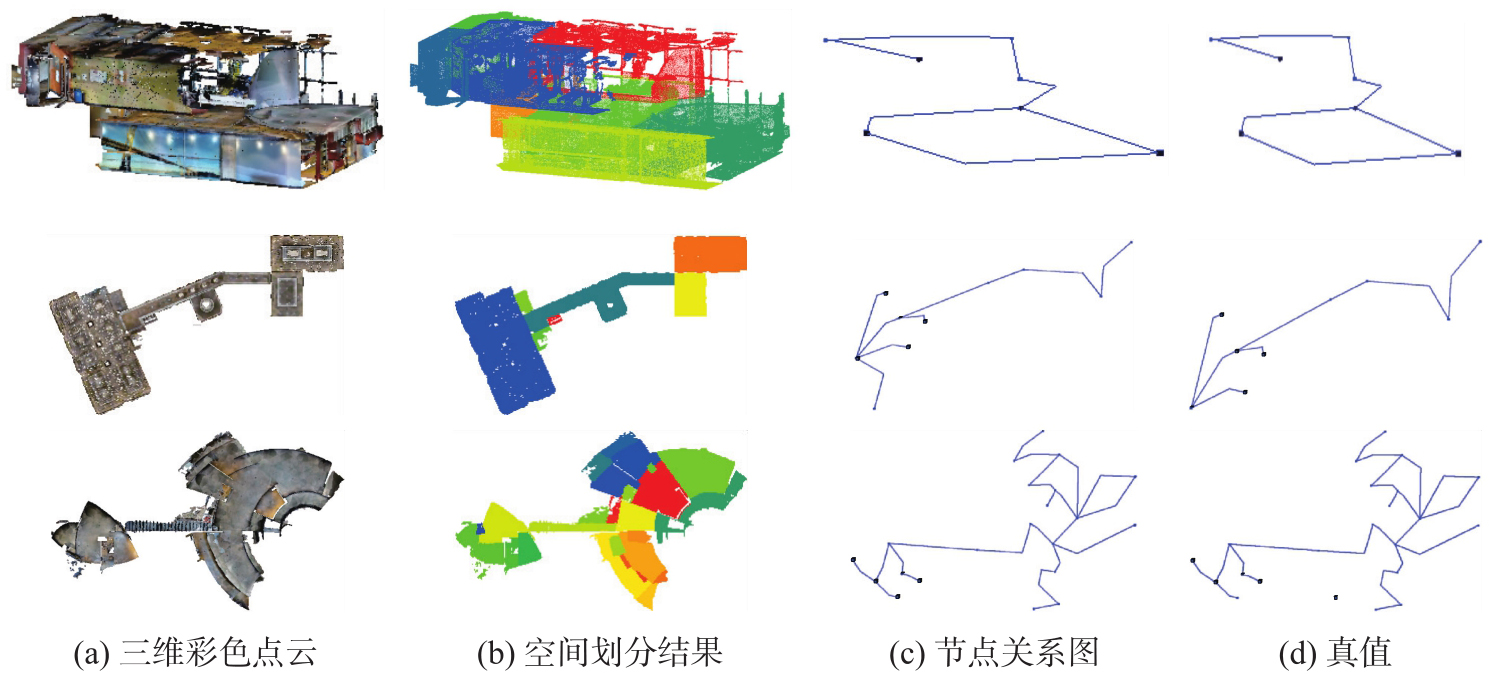
Fig. 19
Comparison of node relationship results in complete building scenes"
Tab. 8
Performances comparison of topological relationship modeling on the Matterport 3D dataset"
| 场景 | nGED | |
|---|---|---|
| BIMNet | 本文 | |
| e9z | 90.10 | 90.41 |
| 7y3 | 73.33 | 83.08 |
| px4 | 80.45 | 81.25 |
| px4_2 | 100.00 | 100.00 |
| d7n | 84.78 | 89.69 |
| zsn | 78.02 | 76.47 |
| q9v | 68.33 | 71.51 |
Fig. 20
Comparison of floor segmentation performance across various methods"
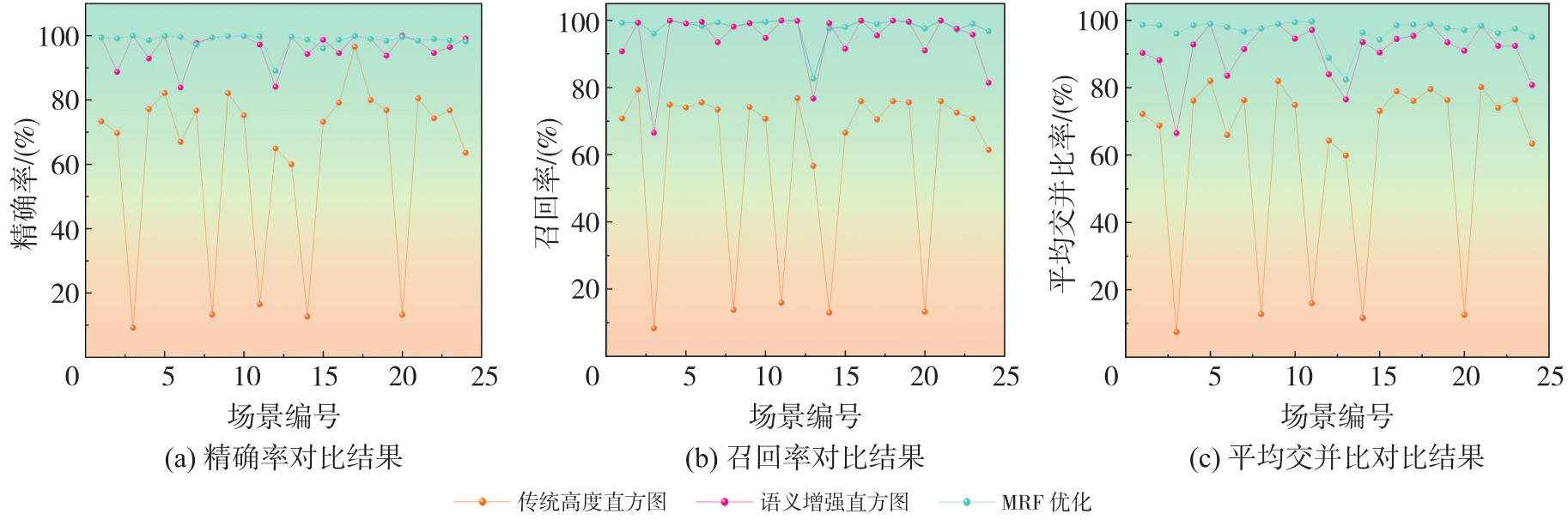

Fig. 21
Comparison of floor segmentation performance under varying threshold values"
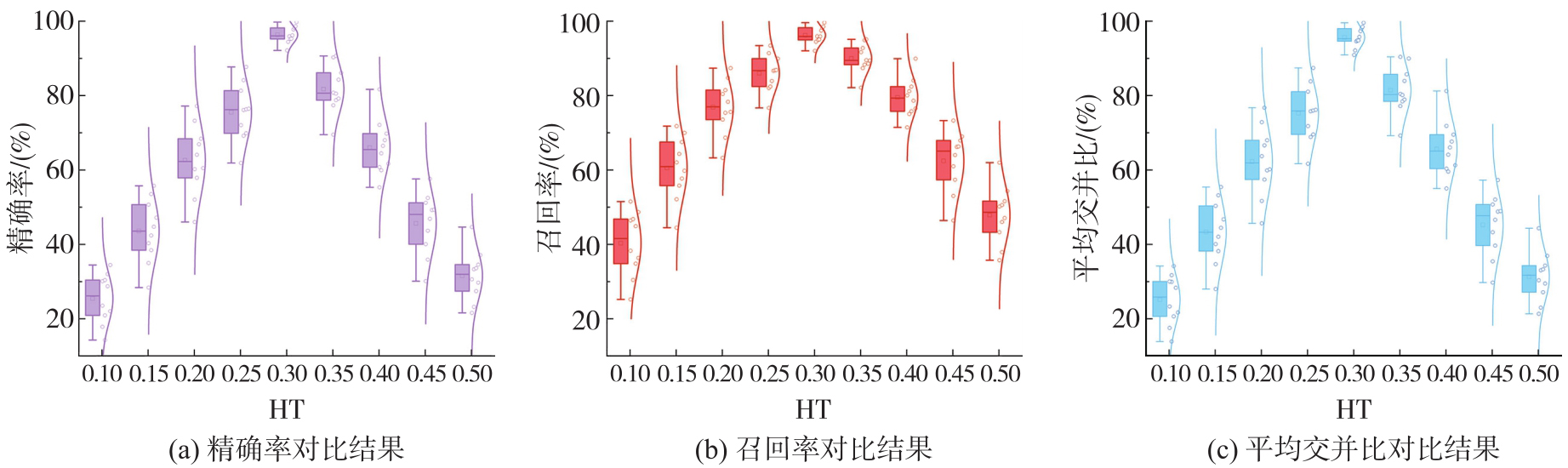

Fig. 22
Performances comparison of different smoothing term weights (λ) in segmentation optimization tasks"
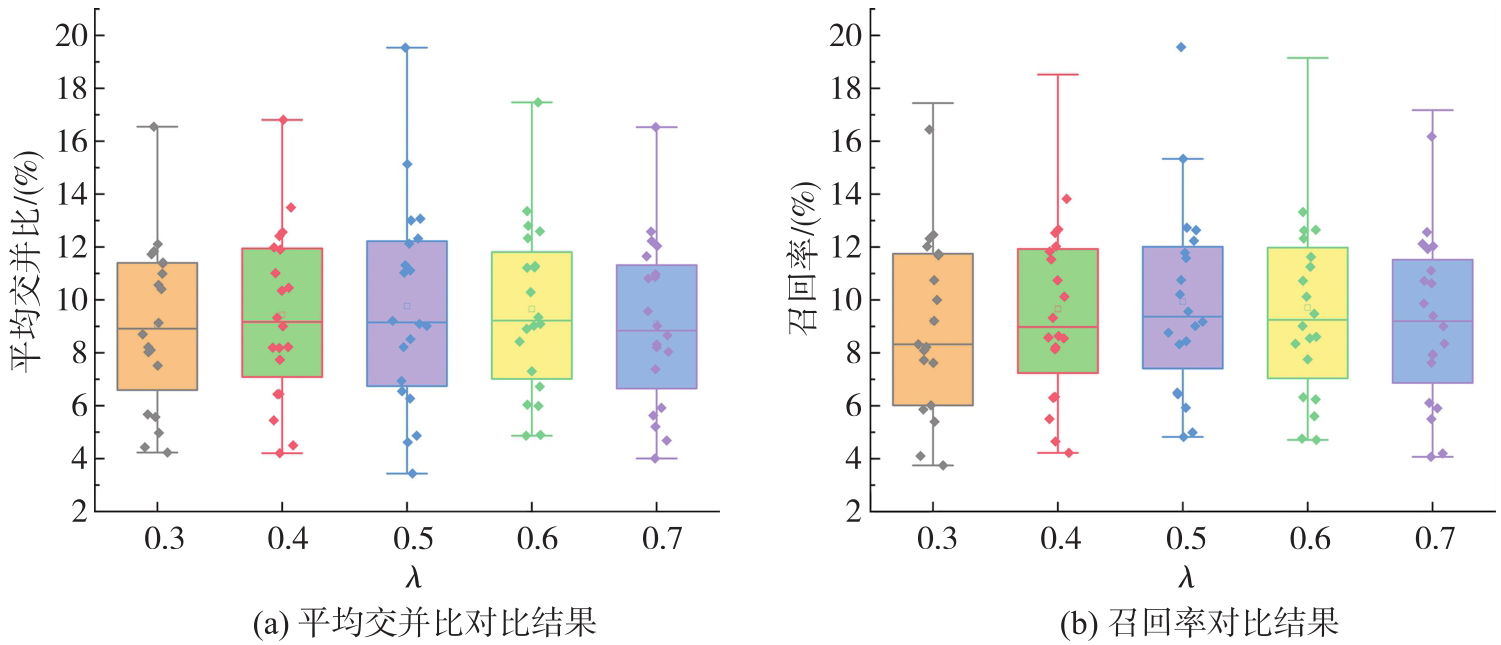

Fig. 23
Representative experimental results under extreme scenarios"
Tab. 9
Quantitative experimental results under three typical extreme scenarios"
| 场景 | 楼层分割结果/(%) | 房间分割结果/(%) | 拓扑关系图结果 | ||||
|---|---|---|---|---|---|---|---|
| 召回率 | 交并比 | 精确率 | 召回率 | 交并比 | 精确率 | nGED | |
| 场景1 | 90.78 | 90.32 | 99.45 | 100.00 | 100.00 | 100.00 | 100.00 |
| 场景2 | — | — | — | 83.33 | 83.33 | 71.43 | 93.75 |
| 场景3 | — | — | — | 76.67 | 88.46 | 69.70 | 74.66 |
| [1] | KANG Zhizhong, YANG Juntao, YANG Zhou, et al. A review of techniques for 3D reconstruction of indoor environments[J]. ISPRS International Journal of Geo-Information, 2020, 9(5): 330. |
| [2] | HUGHES N, CHANG Yun, HU Siyi, et al. Foundations of spatial perception for robotics: hierarchical representations and real-time systems[J]. The International Journal of Robotics Research, 2024, 43(10): 1457-1505. |
| [3] | ISIKDAG U, ZLATANOVA S, UNDERWOOD J. A BIM-oriented model for supporting indoor navigation requirements[J]. Computers, Environment and Urban Systems, 2013, 41: 112-123. |
| [4] | 闫金金, 尚建嘎, 余芳文, 等. 面向实时定位的室内空间结构分析及制图方法[J]. 武汉大学学报(信息科学版), 2016, 41(8): 1079-1086. |
| YAN Jinjin, SHANG Jianga, YU Fangwen, et al. Indoor spatial structure and mapping methods for real-time localization[J]. Geomatics and Information Science of Wuhan University, 2016, 41(8): 1079-1086. | |
| [5] | 郭慧霞, 韩李涛, 张鹏飞. 基于点云的室内房间要素及拓扑关系提取[J]. 北京测绘, 2023, 37(2): 160-166. |
| GUO Huixia, HAN Litao, ZHANG Pengfei. Extracting room elements and topological relations from indoor point cloud[J]. Beijing Surveying and Mapping, 2023, 37(2): 160-166. | |
| [6] | 史云飞, 刘克辉, 李向伟, 等. 一种含室内空间结构的建筑物3D LOD概念模型与生成方法[J]. 武汉大学学报(信息科学版), 2022, 47(4): 561-569, 596. |
| SHI Yunfei, LIU Kehui, LI Xiangwei, et al. A 3D LOD conceptual model of building with indoor spatial structure and its generating method[J]. Geomatics and Information Science of Wuhan University, 2022, 47(4): 561-569, 596. | |
| [7] | ARMENI I, SENER O, ZAMIR A R, et al. 3D semantic parsing of large-scale indoor spaces[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 1534-1543. |
| [8] | 李琪琪, 花向红, 赵不钒, 等. 一种室内场景点云平面分割的新方法[J]. 中国激光, 2021, 48(16): 1604002. |
| LI Qiqi, HUA Xianghong, ZHAO Bufan, et al. New method for plane segmentation of indoor scene point cloud[J]. Chinese Journal of Lasers, 2021, 48(16): 1604002. | |
| [9] | QI C R, YI Li, SU Hao, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[EB/OL]. [2025-12-10]. https://arxiv.org/abs/1706.02413. |
| [10] | 双丰, 黄兴文, 李勇, 等. 基于深度学习的大规模点云语义分割方法综述[J]. 测绘科学, 2023, 48(2): 195-209. |
| SHUANG Feng, HUANG Xingwen, LI Yong, et al. A survey of large-scale point cloud semantic segmentation based on deep learning[J]. Science of Surveying and Mapping, 2023, 48(2): 195-209. | |
| [11] | LI Feng, SHI Wenzhong, ZHANG Hua, et al. Automatic multi-storey building partitioning from point cloud via bidirectional cloth simulation[J]. Journal of Building Engineering, 2024, 97: 110854. |
| [12] | LIU Yudong, HUANG Han, GAO Ge, et al. Dataset and benchmark for as-built BIM reconstruction from real-world point cloud[J]. Automation in Construction, 2025, 173: 106096. |
| [13] | 沈乐, 李桂清, 冼楚华, 等. 室内3D点云模型的门窗检测[J]. 计算机辅助设计与图形学学报, 2019, 31(9): 1494-1501. |
| SHEN Le, LI Guiqing, XIAN Chuhua, et al. Door and window detection in 3D point cloud of indoor scenes[J]. Journal of Computer-Aided Design & Computer Graphics, 2019, 31(9): 1494-1501. | |
| [14] | OCHMANN S, VOCK R, KLEIN R. Automatic reconstruction of fully volumetric 3D building models from oriented point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 151: 251-262. |
| [15] | NIKOOHEMAT S, DIAKITÉ A A, ZLATANOVA S, et al. Indoor 3D reconstruction from point clouds for optimal routing in complex buildings to support disaster management[J]. Automation in Construction, 2020, 113: 103109. |
| [16] | YANG Juntao, KANG Zhizhong, ZENG Liping, et al. Semantics-guided reconstruction of indoor navigation elements from 3D colorized points[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2021, 173: 238-261. |
| [17] | GAO Xiang, YANG Ronghao, CHEN Xuewen, et al. A new framework for generating indoor 3D digital models from point clouds[J]. Remote Sensing, 2024, 16(18): 3462. |
| [18] | KELLNER M, STAHL B, REITERER A. Reconstructing geometrical models of indoor environments based on point clouds[J]. Remote Sensing, 2023, 15(18): 4421. |
| [19] | WANG Y, JIAO W. Parameter-driven level of detail derivation method for semantic building facade model[J]. Journal of Geodesy & Geoinformation Science, 2024, 7(3): 57-75. |
| [20] | BOYKOV Y, VEKSLER O, ZABIH R. Fast approximate energy minimization via graph cuts[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2001, 23(11): 1222-1239. |
| [21] | CHANG A, DAI A, FUNKHOUSER T, et al. Matterport3D: learning from RGB-D data in indoor environments[EB/OL]. [2025-12-10]. https://arxiv.org/abs/1709.06158. |
| [22] | HUGHES N, CHANG Yun, CARLONE L. Hydra: a real-time spatial perception system for 3D scene graph construction and optimization[EB/OL]. [2025-12-10]. https://arxiv.org/abs/2201.13360. |
| [23] | WERBY A, HUANG Chenguang, BÜCHNER M, et al. Hierarchical open-vocabulary 3D scene graphs for language-grounded robot navigation[C]//Proceedings of the 1st Workshop on Vision-Language Models for Navigation and Manipulation at ICRA. [S.l.]: IEEE, 2024. |
| [1] | Pengcheng WEI, Guiyu JIANG, Hangyi SHEN, Haifeng HUANG, Rongling ZHANG. Millimeter-level surface deformation detection method based on high-precision laser point cloud registration [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 866-880. |
| [2] | Yuzhun LIN, Shuxiang WANG, Jie RUI, Fei JIN, Jianfang JIANG, Xibing ZUO, Xiao LIU, Yujie ZOU. Road extraction method for heterogeneous data using sparse labels [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 881-893. |
| [3] | Tiandong SHI, Ling ZHAO, Wenhao ZHAO, Ji QI, Hao CUI, Chengli PENG, Xinchang ZHANG. Controllable generation of high-resolution optical remote sensing image explicitly guided by spatio-temporal information [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 894-908. |
| [4] | Rui YU, Jie LI, Huihui LIU, Meiru WU, Liupeng LIN, Qiangqiang YUAN, Li ZHENG. Heterogeneous remote sensing change detection based on vision-language collaborative representation for flood disasters [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 927-940. |
| [5] | Yingjie QU. Research on Earth surface reconstruction from multi-date satellite image based on neural radiance fields [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 941-941. |
| [6] | Haonan JIANG. Research on ground subsidence monitoring and causes in Wuhan city based on fusion of multi-source InSAR data [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 942-942. |
| [7] | Youxiao WANG. Study on the agricultural non-point source pollution discharge coefficient of nitrogen and phosphorus and the process of entering the sea in the Yellow River Delta [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 947-947. |
| [8] | Peng LI, Jiahan ZHANG, Zhihan WANG, Houjie WANG, Zhenhong LI. A review of intertidal topography reconstruction methods: current status, challenges and trends [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 571-587. |
| [9] | bolin FU, Keyue HUANG, Yanli YANG, Weiwei SUN, Zhaoyin WANG. Multi-scene analysis of mangrove soil spectral response characteristics and inversion of soil organic carbon content based on measured full-spectrum hyperspectral data [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 604-617. |
| [10] | Lanxin WU, Jiangtao PENG, Weiwei SUN, Bing YANG. An Euler embedding and complementary feature modeling framework for hyperspectral change detection in coastal wetlands [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 618-631. |
| [11] | Ertao GAO, Jing LIU, Shujin LI, Guoqing ZHOU, Bolin FU, Shuxian LI. Multi-dimensional spatiotemporal monitoring and analysis of tidal flats in the Maowei Sea using integrated optical remote sensing and SAR [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 632-646. |
| [12] | Hao XU, Nan XU, Huichao XIN, Yue MA, Wei TU, Qingquan LI. A topographic photon extraction method for intertidal zones using ICESat-2 satellite altimeter data [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 658-672. |
| [13] | Jinwei BU, Shuhui LIU, Shunshuang XU, Tongsu XIANG, Qiulan WANG, Chaoying JI, Xiaoqing ZUO. Construction of an empirical model for estimating the global wave period of spaceborne GNSS-R [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 684-697. |
| [14] | Zexin YANG. Research on key technologies for reconstructing building models with multi-LODs using point clouds [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 755-755. |
| [15] | Yongxiang YAO. Generalized similarity feature-based robust matching of multi-modal remote sensing images [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 757-757. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||