


测绘学报 ›› 2025, Vol. 54 ›› Issue (10): 1841-1851.doi: 10.11947/j.AGCS.2025.20240469
李根1( ), 柴洪洲1(), 靳凯迪2, 展昭1
), 柴洪洲1(), 靳凯迪2, 展昭1
收稿日期:2024-11-19
修回日期:2025-09-05
出版日期:2025-11-14
发布日期:2025-11-14
通讯作者:
柴洪洲
E-mail:a1145216790@163.com;chaihz1969@163.com
作者简介:李根(2002—),男,博士生,研究方向为水下UUV自主定位。E-mail:a1145216790@163.com
基金资助:
Gen LI1(), Hongzhou CHAI1(), Kaidi JIN2, Zhao ZHAN1
Received:2024-11-19
Revised:2025-09-05
Online:2025-11-14
Published:2025-11-14
Contact:
Hongzhou CHAI
E-mail:a1145216790@163.com;chaihz1969@163.com
About author:LI Gen (2002—), male, PhD candidate, majors in UUV autonomous navigation. E-mail: a1145216790@163.com
Supported by:摘要:
地形匹配辅助导航(TAN)系统可以修正水下无人航行器(UUV)的位置误差,实现UUV水下绝对定位。针对单波束测深值易受粗差影响,导致基于粒子滤波(PF)的TAN系统易发散的问题,本文提出了一种基于抗差粒子滤波的水下地形匹配定位方法。通过分析测深粗差影响UUV水下地形匹配定位的作用机理,在PF地形匹配中引入抗差估计方法,使用IGG Ⅲ函数设置抗差因子,动态调节粗差观测值对后验状态参数的贡献。蒙特卡洛仿真试验表明,导航结束时,相较于标准PF算法,本文算法的精度与稳定性分别提高了12.20%与58.81%。引入抗差因子后,本文算法面对不同类型粗差时,均表现出了良好的精度与稳定性。
中图分类号:
李根, 柴洪洲, 靳凯迪, 展昭. 水下地形匹配定位抗差粒子滤波算法[J]. 测绘学报, 2025, 54(10): 1841-1851.
Gen LI, Hongzhou CHAI, Kaidi JIN, Zhao ZHAN. Underwater terrain matching method based on robust particle filter[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1841-1851.

图1
粒子滤波地形匹配系统"

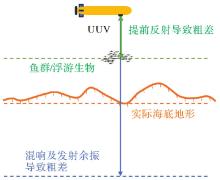
图2
粗差产生因素"

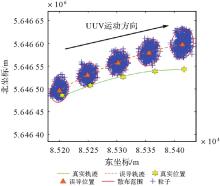
图3
粒子集丢失真实位置"


图4
方差膨胀前后的似然函数曲线"
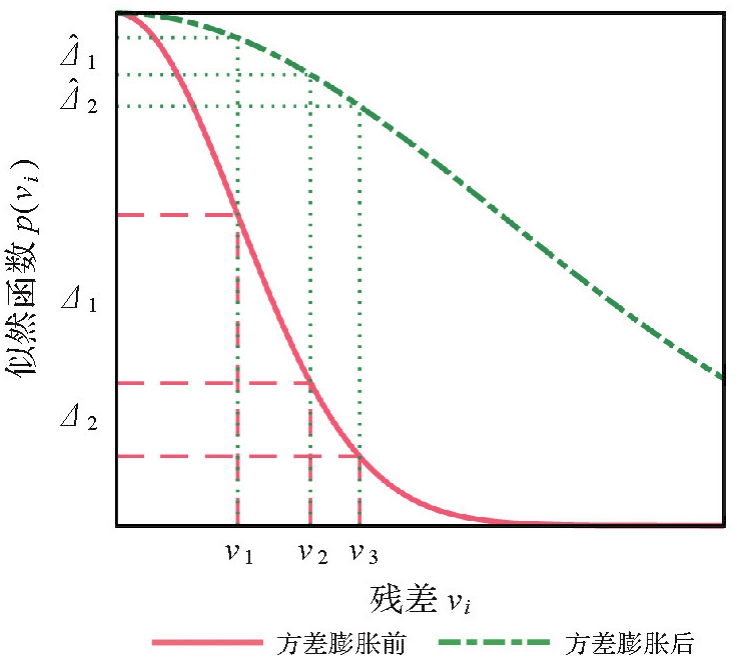

图5
抗差粒子滤波算法流程"
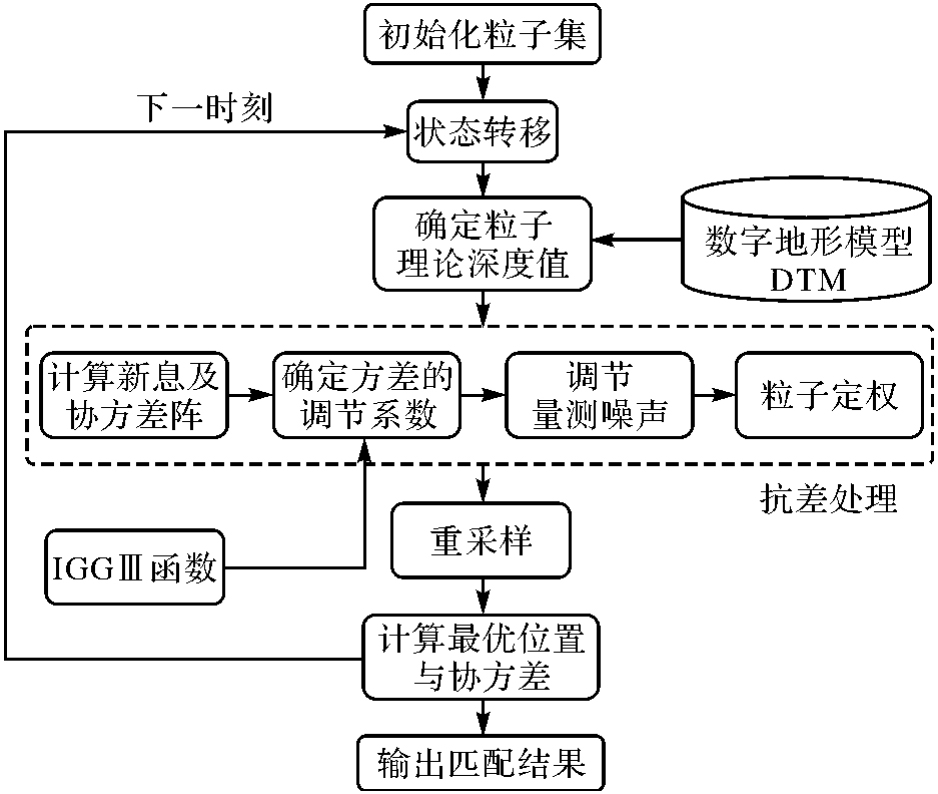
图6
粒子滤波匹配"

表1
匹配区地形特征参数"
| 匹配区参数 | 数值 |
|---|---|
| 经度范围 | 1.188°E—1.263°E |
| 纬度范围 | 50.718°N—50.767°N |
| 分辨率/m | 20 |
| 最大水深/m | 37.900 |
| 最小水深/m | 18.770 |
| 平均水深/m | 25.418 |
| 水深标准差/m | 2.514 |
表2
UUV搭载传感器参数"
| 传感器 | 参数类型 | 数值 |
|---|---|---|
| SINS | 采样频率/Hz | 100 |
| 陀螺零偏/(°/h) | 0.2 | |
| 角度随机游走/(°/h) | 0.1 | |
| 加速度计零偏/μg | 500 | |
速度随机游走/(μg/ ) ) | 200 | |
| DVL | 采样频率/Hz | 1 |
| 测速噪声/(m/s) | 0.05 | |
| PS | 采样频率/Hz | 1 |
| 观测噪声/m | 0.05 | |
| SBES | 采样频率/Hz | 1 |
| 测深噪声/m | 0.2 |
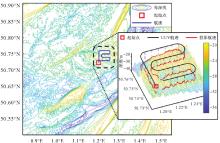
图7
匹配区数字地形模型及航迹"


图8
SINS+DVL/SPF/RPF定位结果"

表3
SINS+DVL/SPF/RPF不同时间的位置误差统计结果"
| 不同时间/s | SINS/DVL | SPF | RPF | |||
|---|---|---|---|---|---|---|
| 均值/m | 标准差/m | 均值/m | 标准差/m | 均值/m | 标准差/m | |
| 100 | 41.427 4 | 9.385 6 | 9.957 0 | 13.987 6 | 9.311 1 | 11.423 5 |
| 200 | 62.546 2 | 32.146 6 | 3.045 8 | 13.149 3 | 2.643 2 | 2.792 2 |
| 300 | 62.353 3 | 44.877 4 | 3.600 7 | 16.405 3 | 2.919 2 | 3.380 2 |
| 400 | 47.459 8 | 30.755 8 | 2.406 4 | 8.756 9 | 1.987 6 | 2.454 2 |
| 500 | 45.357 0 | 35.828 0 | 2.571 8 | 10.789 9 | 2.087 6 | 2.562 0 |
| 600 | 30.916 5 | 26.089 9 | 2.144 1 | 4.634 9 | 1.841 1 | 2.266 7 |

图9
单波束测量值建模"
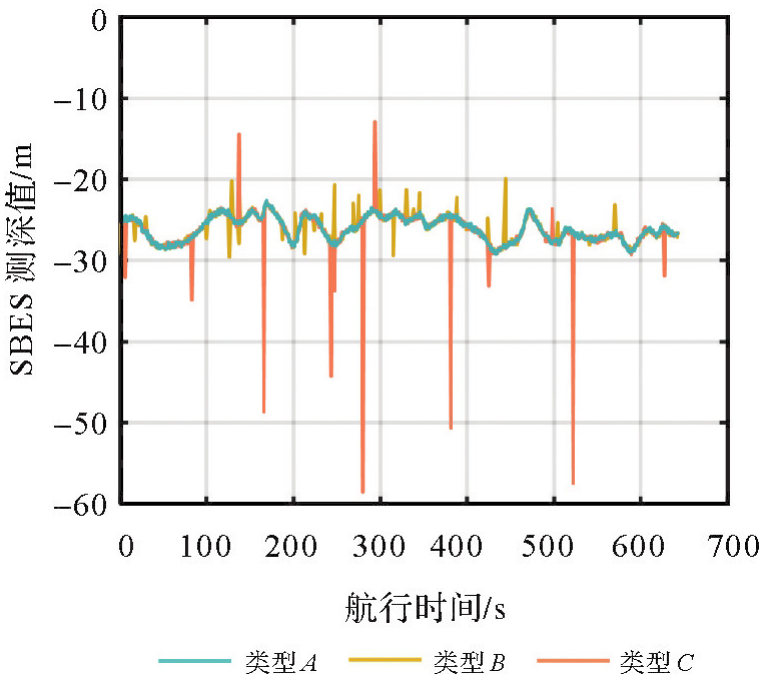

图10
无粗差情况下SPF/RPF算法对比"
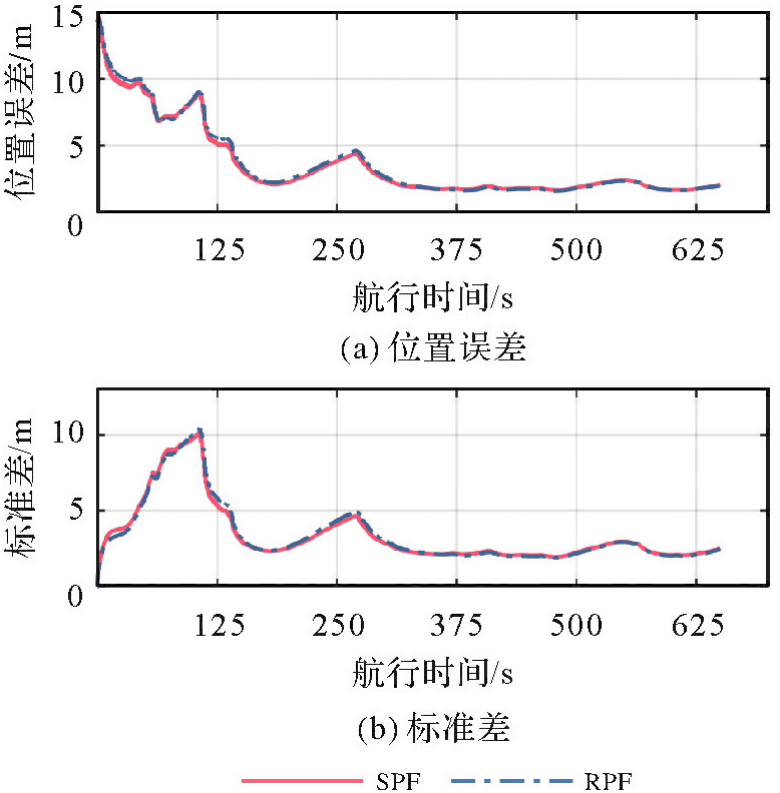

图11
小粗差情况下SPF/RPF算法对比"

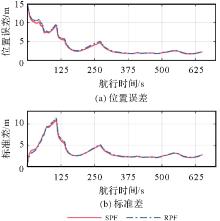
图12
大粗差情况下SPF/RPF算法对比"

表4
不同粗差类型对应定位误差统计结果"
| 粗差类型 | 匹配算法 | 位置误差 | 标准差 |
|---|---|---|---|
| 无粗差 | SPF | 2.041 4 | 2.503 0 |
| RPF | 1.993 3 | 2.453 9 | |
| 小粗差 | SPF | 3.244 2 | 10.148 5 |
| RPF | 2.472 4 | 3.008 1 | |
| 大粗差 | SPF | 2.245 9 | 2.777 0 |
| RPF | 2.224 7 | 2.724 8 |

图13
粒子滤波对大粗差天然具有抗差性"

| [1] |
杨元喜, 徐天河, 薛树强. 我国海洋大地测量基准与海洋导航技术研究进展与展望[J]. 测绘学报, 2017, 46(1): 1-8. DOI: .
doi: 10.11947/j.AGCS.2017.20160519 |
|
YANG Yuanxi, XU Tianhe, XUE Shuqiang. Progresses and prospects in developing marine geodetic datum and marine navigation of China[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(1): 1-8. DOI: .
doi: 10.11947/j.AGCS.2017.20160519 |
|
| [2] | XUE Shuqiang, XU Tianhe, LIU Yanxiong, et al. Recent advances in marine geodesy of China[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 58-66. |
| [3] | 宋保维, 潘光, 张立川, 等. 自主水下航行器发展趋势及关键技术[J]. 中国舰船研究, 2022, 17(5): 27-44. |
| SONG Baowei, PAN Guang, ZHANG Lichuan, et al. Development trend and key technologies of autonomous underwater vehicles[J]. Chinese Journal of Ship Research, 2022, 17(5): 27-44. | |
| [4] | JALAL F, NASIR F. Underwater navigation, localization and path planning for autonomous vehicles: a review[C]//Proceedings of 2021 International Bhurban Conference on Applied Sciences and Technologies. Islamabad: IEEE, 2021: 817-828. |
| [5] | 张伟, 王乃新, 魏世琳, 等. 水下无人潜航器集群发展现状及关键技术综述[J]. 哈尔滨工程大学学报, 2020, 41(2): 289-297. |
| ZHANG Wei, WANG Naixin, WEI Shilin, et al. Overview of unmanned underwater vehicle swarm development status and key technologies[J]. Journal of Harbin Engineering University, 2020, 41(2): 289-297. | |
| [6] |
杜祯强, 柴洪洲, 向民志, 等. 顾及水声误差的UUVs协同定位构型设计及分析[J]. 测绘学报, 2023, 52(8): 1268-1277. DOI: .
doi: 10.11947/j.AGCS.2023.20210597 |
|
DU Zhenqiang, CHAI Hongzhou, XIANG Minzhi, et al. Configuration design and analysis of UUVs cooperative localization with underwater acoustic error[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(8): 1268-1277. DOI: .
doi: 10.11947/j.AGCS.2023.20210597 |
|
| [7] | SALAVASIDIS G, MUNAFÒ A, HARRIS C A, et al. Terrain-aided navigation for long-endurance and deep-rated autonomous underwater vehicles[J]. Journal of Field Robotics, 2019, 36(2): 447-474. |
| [8] |
张立华, 刘现鹏, 贾帅东, 等. 一种线面组合的水下地形匹配算法[J]. 测绘学报, 2018, 47(10): 1406-1414. DOI: .
doi: 10.11947/j.AGCS.2018.20170673 |
|
ZHANG Lihua, LIU Xianpeng, JIA Shuaidong, et al. A line-surface integrated algorithm for underwater terrain matching[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(10): 1406-1414. DOI: .
doi: 10.11947/j.AGCS.2018.20170673 |
|
| [9] | ALEXANDRIS C, PAPAGEORGAS P, PIROMALIS D. Positioning systems for unmanned underwater vehicles: a comprehensive review[J]. Applied Sciences, 2024, 14(21): 9671. |
| [10] | 靳凯迪, 柴洪洲, 宿楚涵, 等. DVL/SINS组合导航技术发展现状及趋势[J]. 导航定位学报, 2022, 10(2): 1-12. |
| JIN Kaidi, CHAI Hongzhou, SU Chuhan, et al. Research status and trends of DVL/SINS integrated navigation technology[J]. Journal of Navigation and Positioning, 2022, 10(2): 1-12. | |
| [11] | TURAN B, ÜNSAL H O. Flight test results of terrain referenced aircraft navigation with laser altimeter[C]//Proceedings of 2023 IEEE/ION Position, Location and Navigation Symposium. Monterey: IEEE, 2023: 835-840. |
| [12] | KIM T, KIM J, BYUN S W. A comparison of nonlinear filter algorithms for terrain-referenced underwater navigation[J]. International Journal of Control, Automation and Systems, 2018, 16(6): 2977-2989. |
| [13] | GUSTAFSSON F, GUNNARSSON F, BERGMAN N, et al. Particle filters for positioning, navigation, and tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 425-437. |
| [14] | MA Teng, LI Ye, ZHAO Yuxin, et al. An AUV localization and path planning algorithm for terrain-aided navigation[J]. ISA Transactions, 2020, 103: 215-227. |
| [15] | 刘东东. 基于粒子滤波的海底地形辅助导航技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2022. |
| LIU Dongdong. Research on submarine terrain aided navigation technology based on particle filter[D]. Harbin: Harbin Engineering University, 2022. | |
| [16] | TICHAVSKY P, STRAKA O, DUNIK J. Grid-based Bayesian filters with functional decomposition of transient density[J]. IEEE Transactions on Signal Processing, 2023, 71: 92-104. |
| [17] | MATOUŠEK J, DUNÍK J, BRANDNER M. Design of efficient point-mass filter with terrain aided navigation illustration[C]//Proceedings of 2023 International Conference on Information Fusion. Charleston: IEEE, 2023: 1-8. |
| [18] | MA Teng, DING Shuoshuo, LI Ye, et al. A review of terrain aided navigation for underwater vehicles[J]. Ocean Engineering, 2023, 281: 114779. |
| [19] | MEDUNA D K, ROCK S M, MCEWEN R. Low-cost terrain relative navigation for long-range AUVs[C]//Proceedings of 2008 OCEANS. Quebec city: IEEE, 2008: 1-7. |
| [20] | OSTERMAN N, RHEN C. Exploring the sensor requirements for particle filter-based terrain-aided navigation in AUVs[C]//Proceedings of 2020 IEEE/OES Autonomous Underwater Vehicles Symposium. St Johns: IEEE, 2020: 1-6. |
| [21] | 李明叁, 张杰, 严怀志, 等. 序统计滤波估计检测海洋测深异常数据[J]. 海洋测绘, 2007, 27(1): 7-11. |
| LI Mingsan, ZHANG Jie, YAN Huaizhi, et al. Order statistics filtering for detecting outliers in depth data along a sounding line[J]. Hydrographic Surveying and Charting, 2007, 27(1): 7-11. | |
| [22] | 黄辰虎, 陆秀平, 欧阳永忠, 等. 多波束水深测量误差源分析与成果质量评定[J]. 海洋测绘, 2014, 34(2): 1-6. |
| HUANG Chenhu, LU Xiuping, OUYANG Yongzhong, et al. Analysis of error source and quality assessment about multibeam sounding product[J]. Hydrographic Surveying and Charting, 2014, 34(2): 1-6. | |
| [23] | 黄谟涛, 翟国君, 王瑞, 等. 海洋测量中异常数据的定位研究[J]. 海洋测绘, 1999, 19(2): 10-19. |
| HUANG Motao, ZHAI Guojun, WANG Rui, et al. Study on the location of abnormal data in marine survey[J]. Hydrographic Surveying and Charting, 1999, 19(2): 10-19. | |
| [24] | 杨元喜. 自适应动态导航定位[M]. 北京: 测绘出版社, 2006. |
| YANG Yuanxi. Adaptive dynamic navigation and positioning[M]. Beijing: Surveying and Mapping Press, 2006. | |
| [25] | 杨元喜. 抗差估计理论及其应用[M]. 北京: 八一出版社, 1993. |
| YANG Yuanxi. Theory of robust estimation and its application[M]. Beijing: Bayi Press, 1993. | |
| [26] | 杨元喜, 何海波, 徐天河. 论动态自适应滤波[J]. 测绘学报, 2001, 30(4): 293-298. |
| YANG Yuanxi, HE Haibo, XU Tianhe. Adaptive robust filtering for kinematic GPS positioning[J]. Acta Geodaetica et Cartographic Sinica, 2001, 30(4): 293-298. | |
| [27] | TURAN B, KUTAY A T. Particle filter studies on terrain referenced navigation[C]//Proceedings of 2016 IEEE/ION Position, Location and Navigation Symposium. Savannah: IEEE, 2016: 949-954. |
| [28] | SHOM. MNT topo-bathymetrique cotier à 20m du détroit du Pas-de-Calais (Projet TANDEM)[EB/OL]. [2024-05-18]. http://dx.doi.org/10.17183/MNT_COTIER_DETROIT_PDC_TANDEM_20m_WGS84. |
| [29] | 黄谟涛, 邓凯亮, 欧阳永忠, 等. 卫星测高重力模型在海空重力测量误差检测中的应用[J]. 华中科技大学学报(自然科学版), 2022, 50(9): 126-133. |
| HUANG Motao, DENG Kailiang, OUYANG Yongzhong, et al. Application of satellite altimeter-derived gravity model in the error detection of shipborne and airborne gravimetry[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2022, 50(9): 126-133. |
| [1] | 卞加超, 薛树强, 赵爽, 朱冀星, 高金来, 李保金. 海洋声学导航开窗抗差最小二乘估计[J]. 测绘学报, 2026, 55(3): 515-524. |
| [2] | 姚朝龙, 游泓锐, 何玄晖, 陆钧雅, 谢依倩, 李琼, 朱双, 罗志才. 综合利用GNSS PWV/垂向形变与GRACE/GRACE-FO数据反演综合干旱指数[J]. 测绘学报, 2025, 54(10): 1757-1768. |
| [3] | 邝英才, 吕志平, 李林阳, 王方超, 许国昌. GNSS-A水下定位的动态非线性Gauss-Helmert模型及其抗差总体卡尔曼滤波算法[J]. 测绘学报, 2023, 52(4): 559-570. |
| [4] | 王泽明, 李浩军, 孙亚峰. GNSS-R潮位监测抗差估计[J]. 测绘学报, 2023, 52(2): 195-205. |
| [5] | 孙悦, 薛树强, 韩保民, 肖圳. 邻近海底基准站坐标时序联合处理模型[J]. 测绘学报, 2023, 52(11): 1835-1843. |
| [6] | 郝雨时, 孙剑伟, 隋心, 徐爱功, 施闯. 顾及ISB/IFB的多GNSS RTK/INS紧组合导航方法[J]. 测绘学报, 2022, 51(11): 2265-2272. |
| [7] | 杨高朝, 王庆, 蔚保国, 刘鹏飞, 李爽. 基于抗差LM的视觉惯性里程计与伪卫星混合高精度室内定位[J]. 测绘学报, 2022, 51(1): 18-30. |
| [8] | 周哲, 胡钊政, 李娜, 肖汉彪, 伍锦祥. 面向智能车的地下停车场环视特征地图构建与定位[J]. 测绘学报, 2021, 50(11): 1574-1584. |
| [9] | 郭迎钢, 李宗春, 何华, 王志颖. 三维坐标转换公共点最优权值的单纯形搜索算法[J]. 测绘学报, 2020, 49(8): 1004-1013. |
| [10] | 尹潇, 柴洪洲, 向民志, 杜祯强. 附加运动学约束的BDS抗差UKF导航算法[J]. 测绘学报, 2020, 49(11): 1399-1406. |
| [11] | 焦博, 郝金明, 刘伟平, 张辉, 温旭峰, 师一帅. 单参考星下全星座单差FCB估计与应用[J]. 测绘学报, 2018, 47(10): 1326-1336. |
| [12] | 李林阳, 崔阳, 王宇谱, 吕志平. 窄巷FCB估计方法改进及时变特性分析[J]. 测绘学报, 2017, 46(1): 34-43. |
| [13] | 陈康慷, 徐天河, 杨玉国, 蔡洪亮, 陈国. iGMAS GNSS钟差产品综合与评估[J]. 测绘学报, 2016, 45(S2): 46-53. |
| [14] | 王宇谱, 吕志平, 王宁, 李林阳, 宫晓春. 顾及卫星钟随机特性的抗差最小二乘配置钟差预报算法[J]. 测绘学报, 2016, 45(6): 646-655. |
| [15] | 陶叶青, 高井祥, 姚一飞. 基于中位数法的抗差总体最小二乘估计[J]. 测绘学报, 2016, 45(3): 297-301. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||