


测绘学报 ›› 2026, Vol. 55 ›› Issue (5): 809-825.doi: 10.11947/j.AGCS.2026.20250313
姚凌寒1,2( ), 徐天河2(), 丛阳滋2, 张震2, 邢建平1
), 徐天河2(), 丛阳滋2, 张震2, 邢建平1
收稿日期:2025-08-11
修回日期:2026-05-06
出版日期:2026-06-23
发布日期:2026-06-23
通讯作者:
徐天河
E-mail:202420423@mail.sdu.edu.cn;thxu@sdu.edu.cn
作者简介:姚凌寒(1998—),男,博士生,研究方向为多源融合导航定位。 E-mail:202420423@mail.sdu.edu.cn
基金资助:
Linghan YAO1,2(), Tianhe XU2(), Yangzi CONG2, Zhen ZHANG2, Jianping XING1
Received:2025-08-11
Revised:2026-05-06
Online:2026-06-23
Published:2026-06-23
Contact:
Tianhe XU
E-mail:202420423@mail.sdu.edu.cn;thxu@sdu.edu.cn
About author:YAO Linghan (1998—), male, PhD candidate, majors in multi-sensor fusion navigation and positioning. E-mail: 202420423@mail.sdu.edu.cn
Supported by:摘要:
高精度北斗/GNSS信号能够为用户提供可靠的定位信息,但当其信号受遮挡不可用时,实现高精度、强稳健性的自主定位是移动机器人系统面临的核心挑战。尽管激光雷达惯性里程计(LIO)算法近年来取得了显著进展,但在点云稀疏、视野遮挡和大角度旋转等场景下,易出现观测退化与漂移等问题,严重影响系统的稳定性及定位精度。超宽带测距(UWB)作为一种低功耗、低成本的绝对定位技术,拥有低延迟和抗干扰等优势,但极易受NLOS误差的影响。在此背景下,LiDAR能够提供高频率的几何特征信息,IMU能够维持短时连续性,UWB能够提供全局位置约束,三者在互补性上具有明显优势。然而,根据传感器优势构建具有针对性的融合框架实现观测信息互补及误差抑制依然是多源传感器融合的难点之一。针对上述问题,本文设计了一种基于迭代误差状态抗差卡尔曼滤波(IESRKF)的LiDAR/UWB/INS紧耦合模型,实现了异构传感器间观测残差统一建模与自适应抗差估计。通过引入UWB测距提供绝对位置约束,并结合多次迭代的线性优化提高了状态收敛的稳定性,有效缓解LIO系统在大角度旋转场景下的误差累积与漂移。试验结果表明,本文设计的ULIO-IESRKF算法相较传统LIO算法与ULIO-LC算法在大角度旋转及遮挡严重的路径下具有较好的表现,并且通过引入多次迭代的线性优化机制,有效缓解了一阶线性化所带来的建模误差。相较于LIO算法,ULIO-IESRKF算法的定位精度在E、N、U方向上分别提升了29.15%、42.42%、30.37%,平面方向上提升38.00%,在Pitch、Roll、Yaw上分别提升了10.15%、6.70%、34.80%;试验结果充分验证了本文算法具有较高的定位精度,且具备较强的稳健性与动态适应能力。
中图分类号:
姚凌寒, 徐天河, 丛阳滋, 张震, 邢建平. 基于IESRKF的LiDAR/UWB/INS多源传感器紧耦合模型[J]. 测绘学报, 2026, 55(5): 809-825.
Linghan YAO, Tianhe XU, Yangzi CONG, Zhen ZHANG, Jianping XING. Tightly coupled LiDAR/UWB/INS multi-sensor fusion model based on IESRKF[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 809-825.

图1
LiDAR/UWB/INS多源传感器紧耦合模型流程"
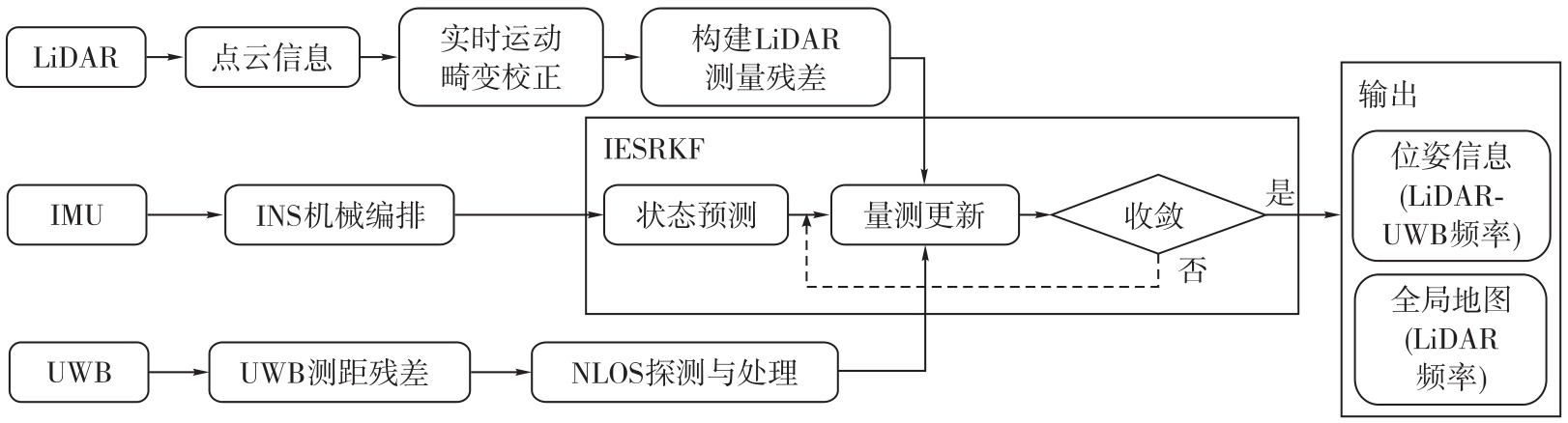
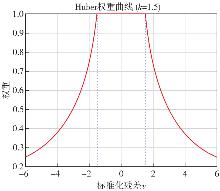
图2
Huber函数的权重自适应调节曲线"
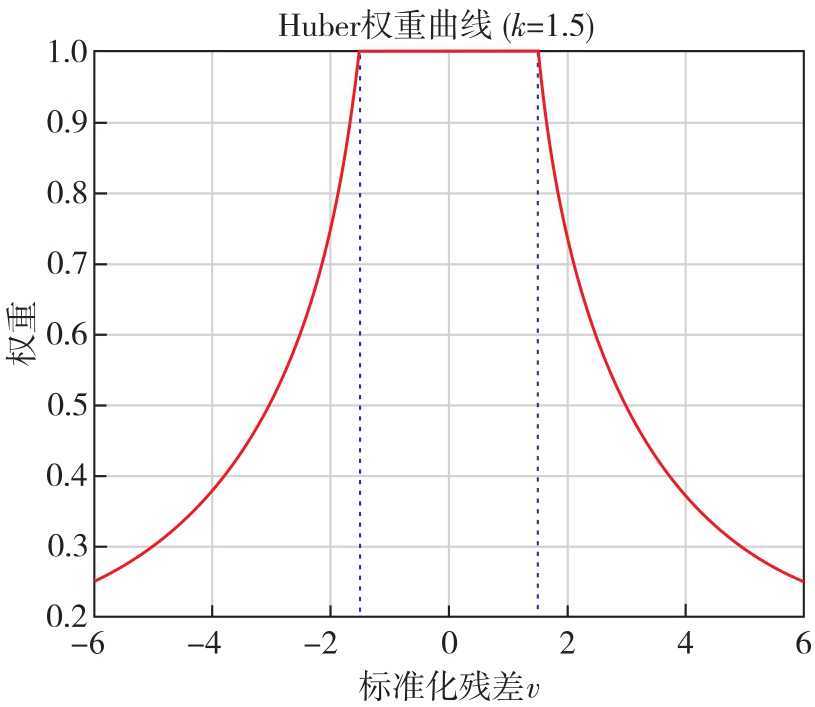

图3
试验场地及多源传感器集成平台"
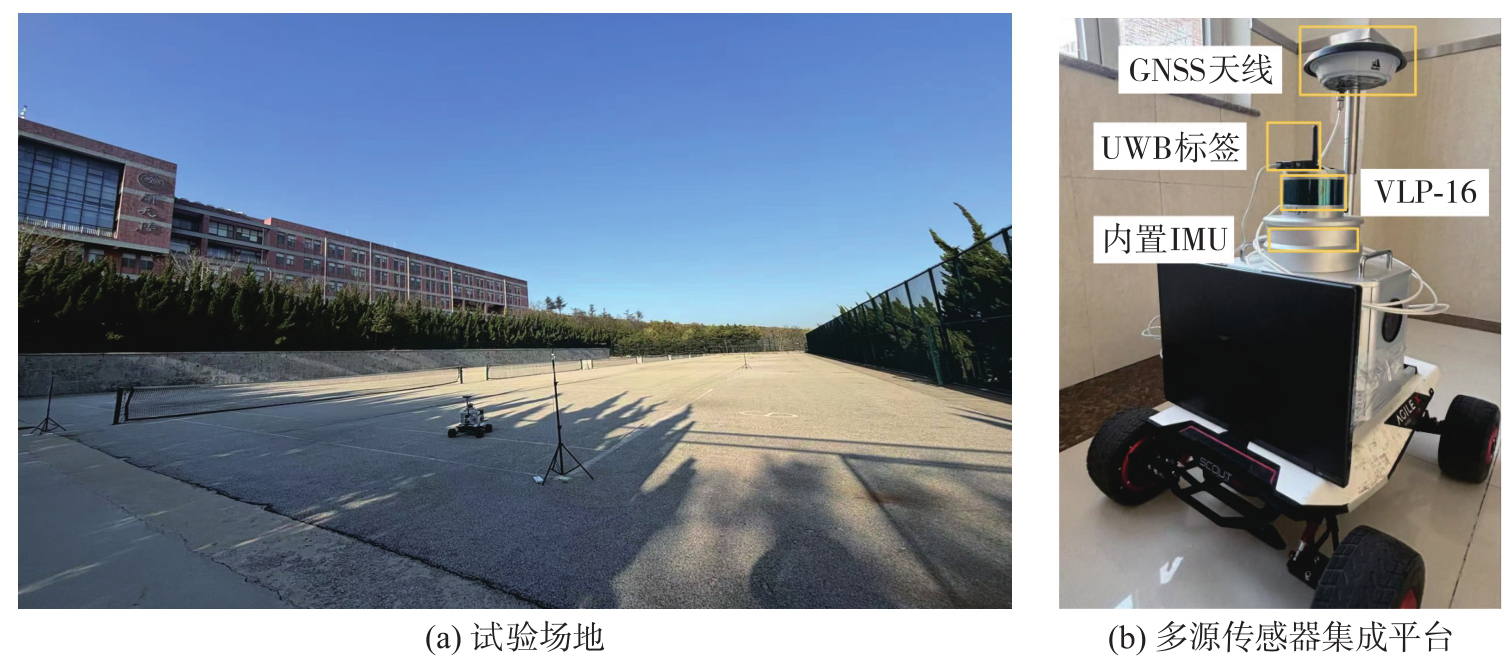
表1
LiDAR传感器相关参数"
| 参数 | LiDAR |
|---|---|
| 激光线束 | 16线 |
| 激光波长 | 905 nm |
| 测量范围 | 小于100 m |
| 测量精度 | ±3 cm |
| 采样频率 | 10 Hz |
| 水平方向测角范围 | 360° |
| 水平方向角度分辨率 | 0.1°~0.4° |
| 垂直方向测角范围 | +15°~-15° |
| 垂直方向角度分辨率 | 2° |
表2
HGuide i300 IMU相关参数"
| 参数 | 陀螺仪 | 加速度计 |
|---|---|---|
| 零偏不稳定性 | 3(°)/h | 0.02 mg |
| 白噪声 |  |  |
图4
UWB LOS试验与NLOS试验中的VDOP与HDOP值"
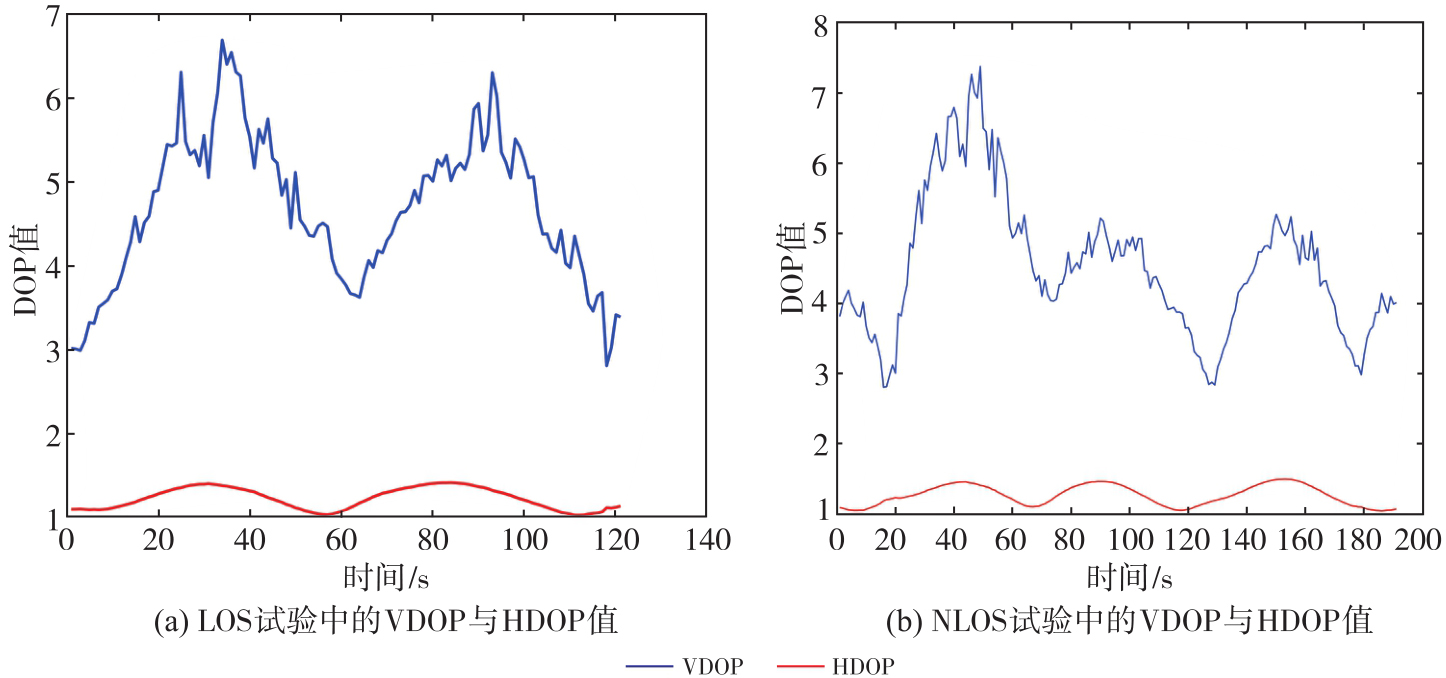
图5
LOS环境下各类算法整体轨迹和局部轨迹"
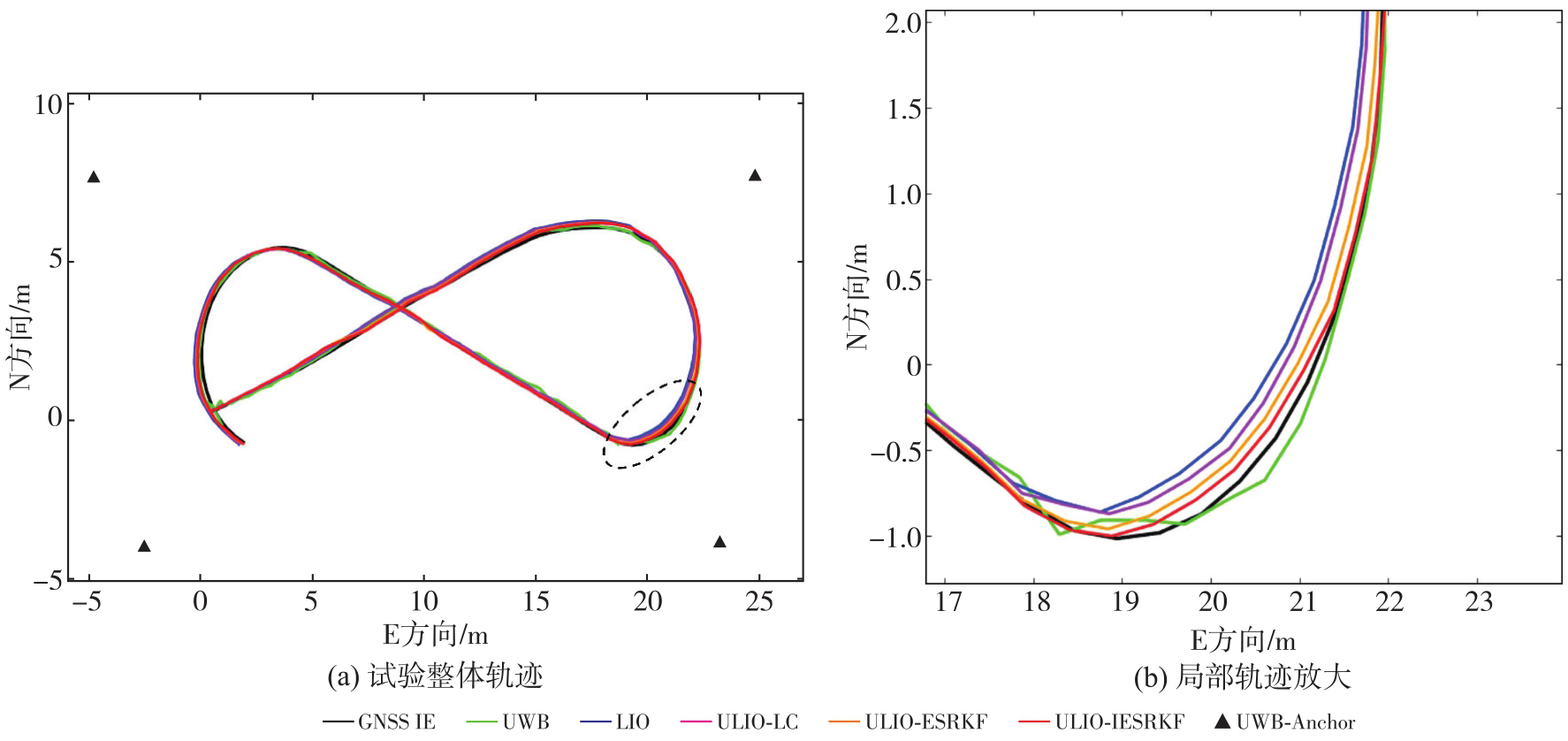

图6
LOS环境下各类算法位置误差时间序列和位置误差箱线图"
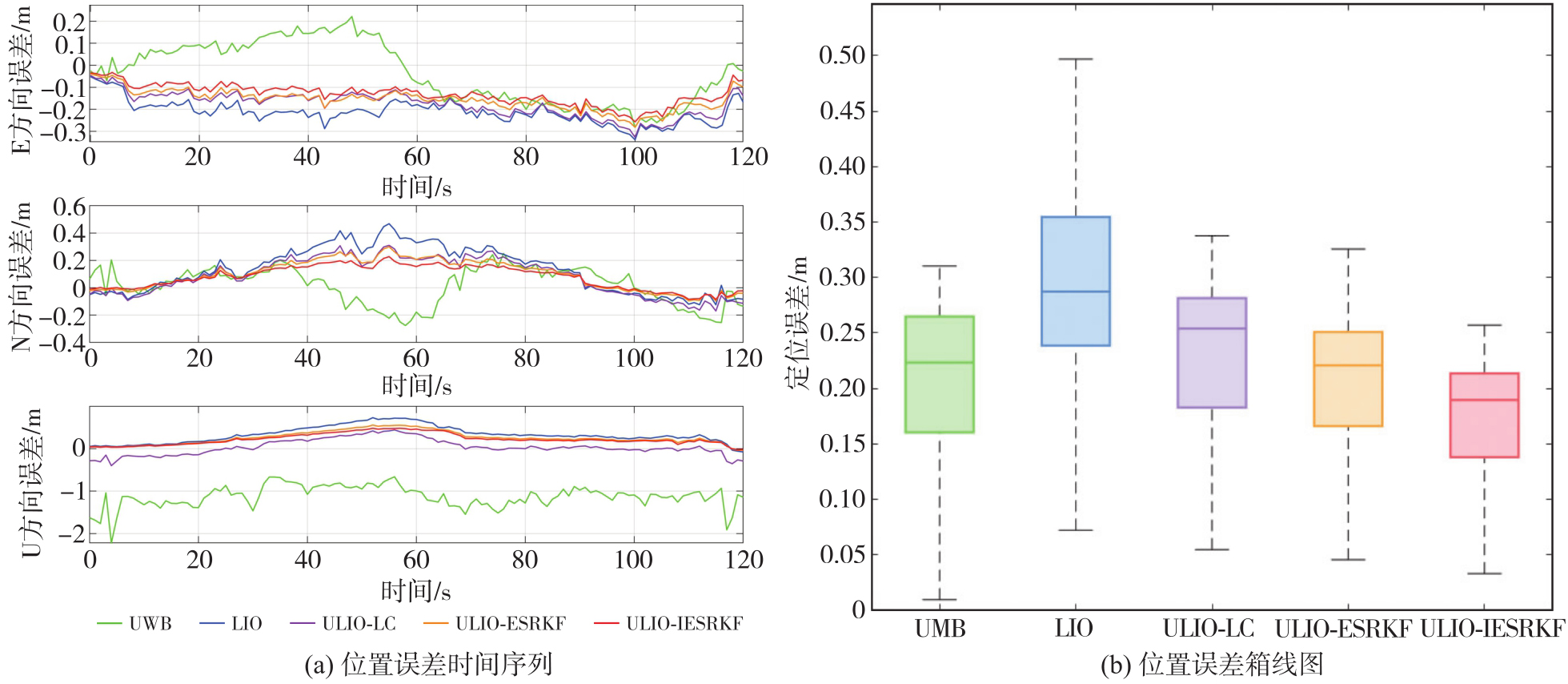
表3
LOS环境下各类算法位置RMSE统计"
| 方向 | UWB | LIO | ULIO-LC | ULIO-ESRKF | ULIO-IESRKF |
|---|---|---|---|---|---|
| E | 0.143 | 0.218 | 0.186 | 0.163 | 0.140 |
| N | 0.135 | 0.208 | 0.174 | 0.142 | 0.115 |
| U | 1.160 | 0.330 | 0.487 | 0.295 | 0.259 |
| 平面 | 0.197 | 0.301 | 0.255 | 0.216 | 0.181 |

图7
LOS环境下各类算法姿态误差时间序列图和姿态误差累计分布"
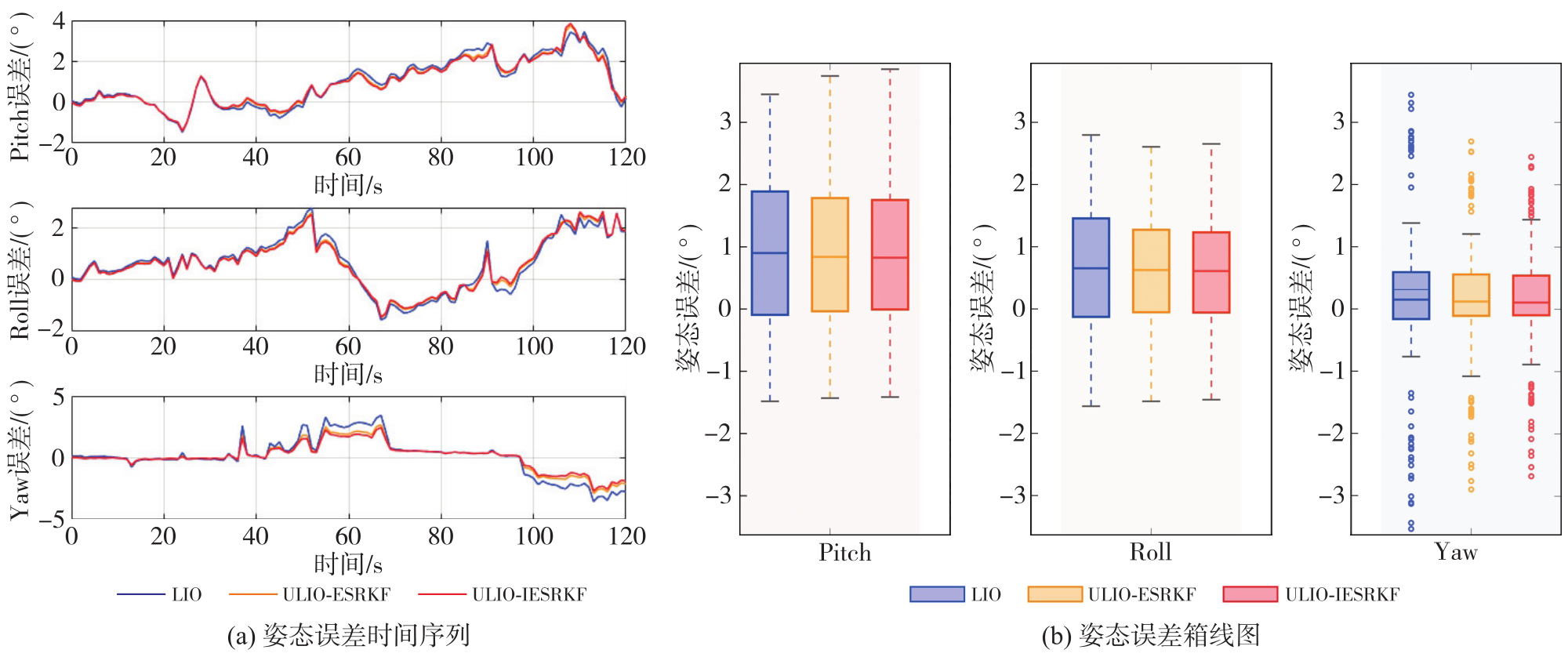
表4
LOS环境下各类算法姿态RMSE统计"
| 姿态 | LIO | ULIO-ESRKF | ULIO-IESRKF |
|---|---|---|---|
| Pitch | 1.523 | 1.467 | 1.452 |
| Roll | 1.234 | 1.194 | 1.184 |
| Yaw | 1.547 | 1.176 | 1.059 |

图8
NLOS环境下各类算法整体轨迹和局部旋转区域轨迹"
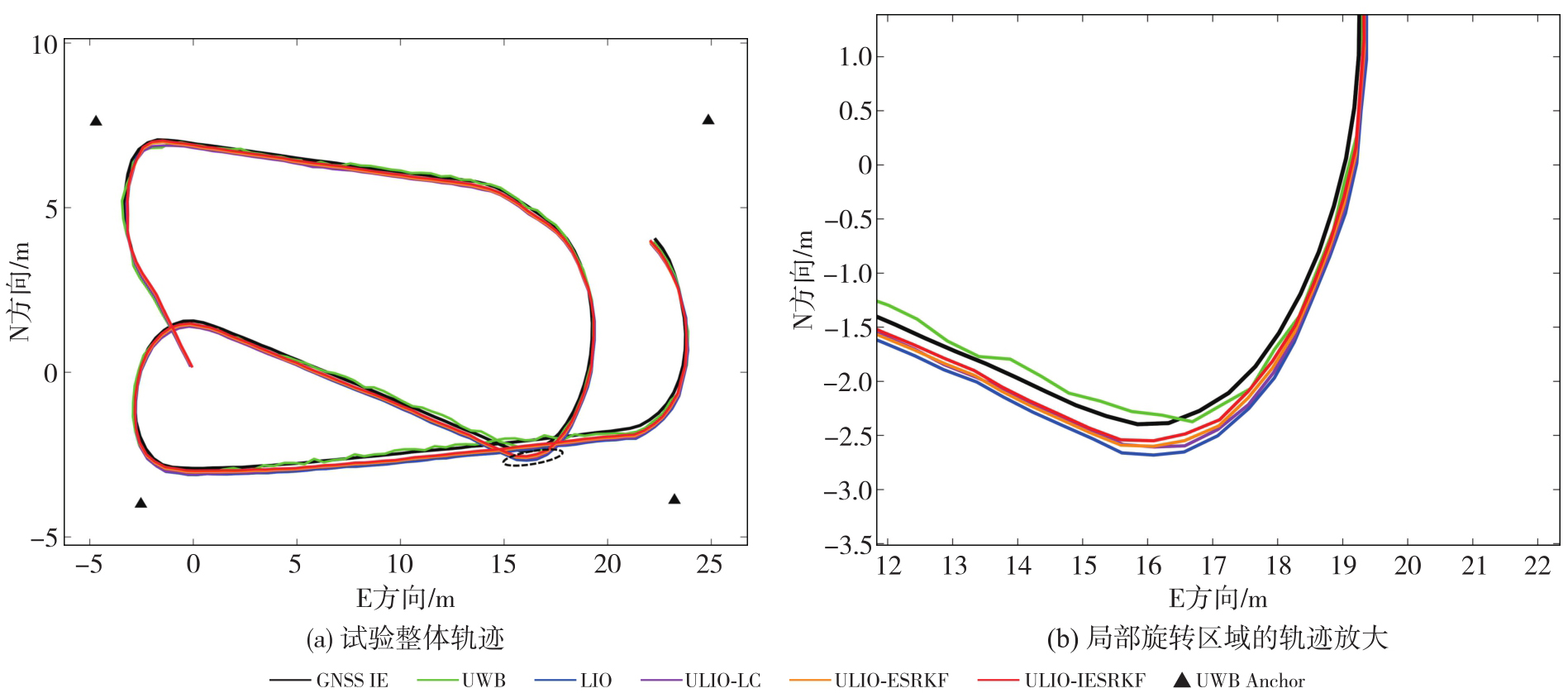

图9
NLOS环境下各类算法位置误差时间序列和位置误差箱线图"
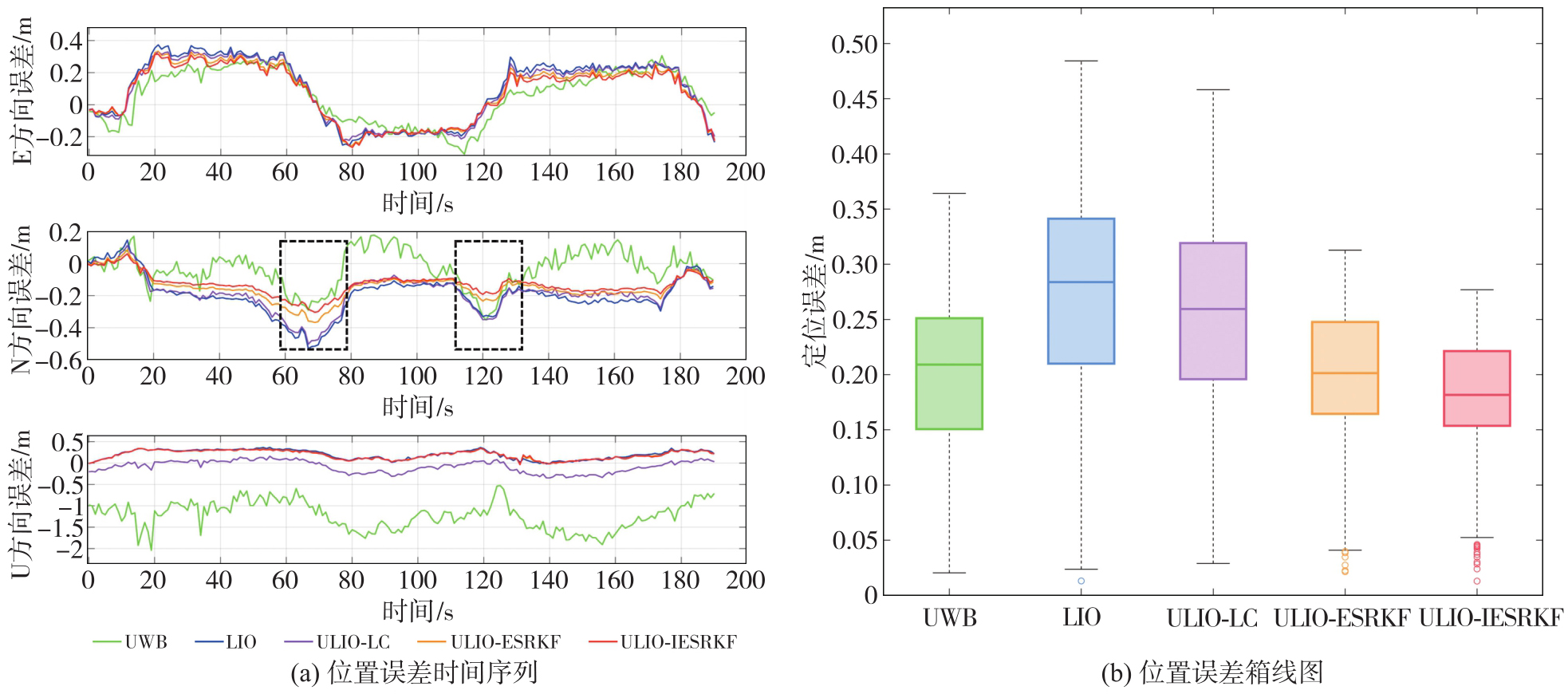
表5
NLOS环境下各类算法位置RMSE统计"
| 方向 | UWB | LIO | ULIO-LC | ULIO-ESRKF | ULIO-IESRKF |
|---|---|---|---|---|---|
| E | 0.173 | 0.223 | 0.201 | 0.180 | 0.158 |
| N | 0.152 | 0.231 | 0.214 | 0.146 | 0.133 |
| U | 1.274 | 0.270 | 0.292 | 0.221 | 0.188 |
| 平面 | 0.230 | 0.321 | 0.294 | 0.232 | 0.199 |
表6
NLOS环境下各类算法位置最大误差"
| 方向 | UWB | LIO | ULIO-LC | ULIO-ESRKF | ULIO-IESRKF |
|---|---|---|---|---|---|
| E | 0.310 | 0.374 | 0.342 | 0.333 | 0.316 |
| N | 0.352 | 0.531 | 0.503 | 0.367 | 0.304 |
| U | 2.012 | 0.368 | 0.347 | 0.349 | 0.343 |

图10
NLOS环境下各类算法姿态误差时间序列和姿态误差累计分布"
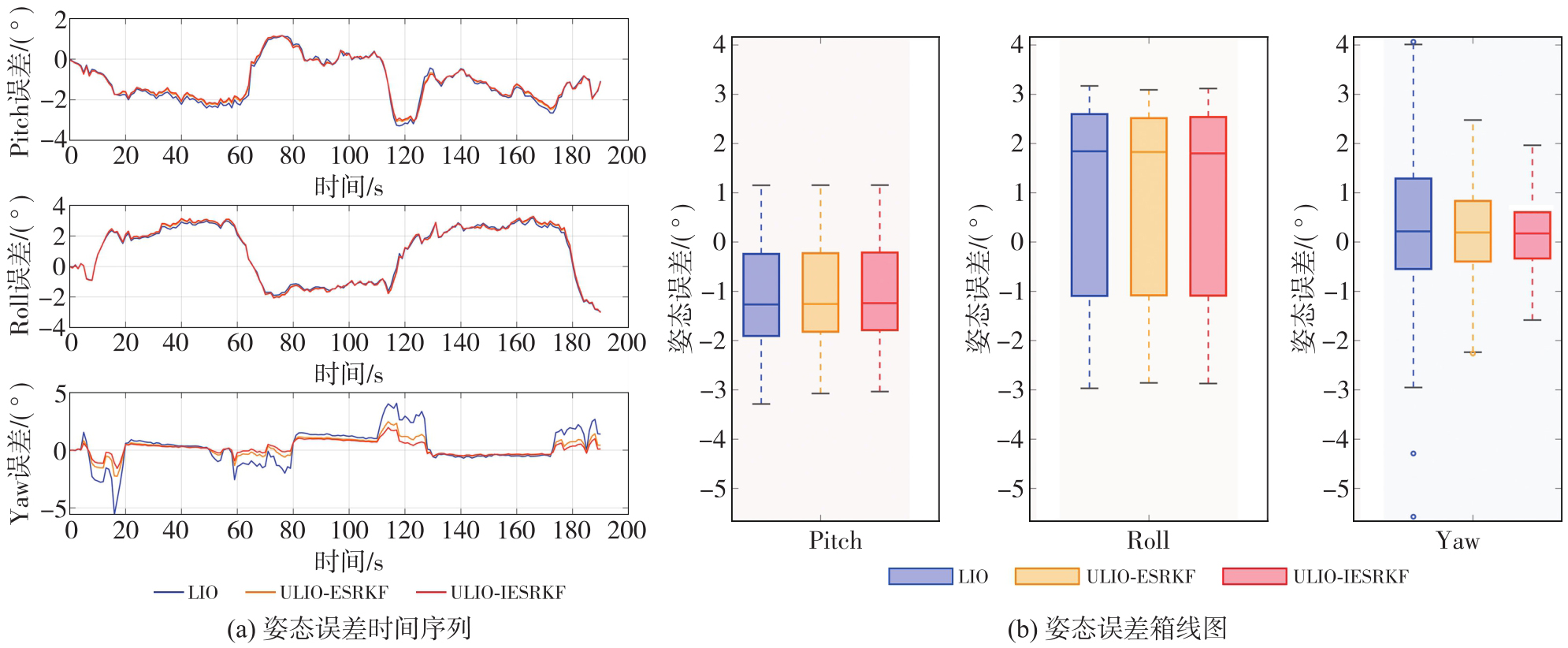
表7
NLOS环境各类算法姿态RMSE"
| 姿态 | LIO | ULIO-ESRKF | ULIO-IESRKF |
|---|---|---|---|
| Pitch | 1.547 | 1.477 | 1.390 |
| Roll | 2.059 | 1.989 | 1.921 |
| Yaw | 1.618 | 1.233 | 1.055 |

图11
NLOS环境下各类ULIO算法轨迹和位置误差时间序列"
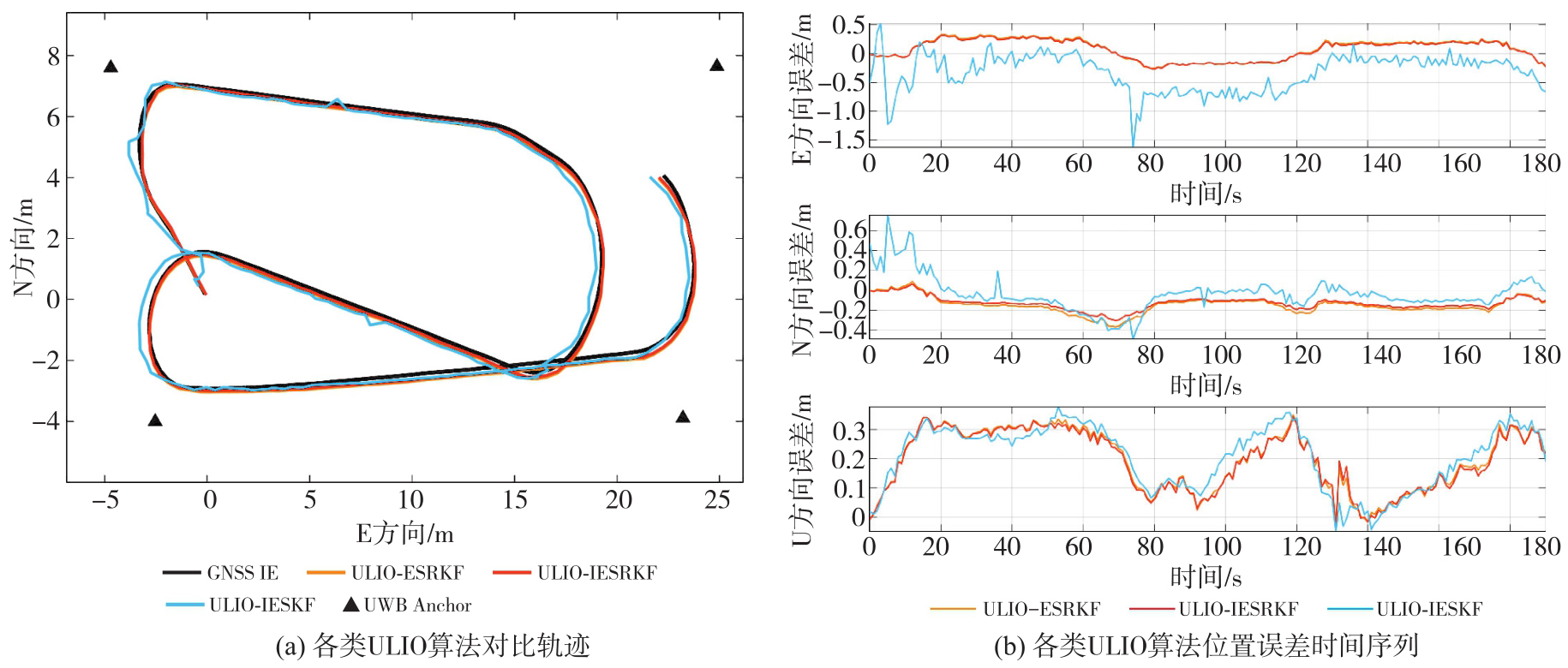
表8
NLOS环境下ULIO-IESKF、ULIO-IESRKF算法位置误差RMSE、最大值及平均值"
| 误差指标 | 方向 | ULIO-IESKF | ULIO-IESRKF |
|---|---|---|---|
| RMSE | E | 0.285 | 0.158 |
| N | 0.238 | 0.133 | |
| U | 0.208 | 0.188 | |
| 平面 | 0.371 | 0.199 | |
| 最大值 | E | 1.630 | 0.316 |
| N | 0.758 | 0.304 | |
| U | 0.377 | 0.343 | |
| 平均值 | E | -0.330 | 0.068 |
| N | -0.036 | -0.093 | |
| U | 0.206 | 0.183 |
表9
各类算法的平均计算耗时统计表"
| 算法 | 耗时 |
|---|---|
| UWB | 0.61 |
| FAST-LIO2 | 8.58 |
| ULIO-LC | 9.21 |
| ULIO-ESRKF | 10.23 |
| ULIO-IESRKF | 12.55 |
| [1] | 杨元喜, 任夏, 贾小林, 等. 以北斗系统为核心的国家安全PNT体系发展趋势[J]. 中国科学:地球科学, 2023, 53(5): 917-927. |
| YANG Yuanxi, REN Xia, JIA Xiaolin, et al. Development trends of the national secure PNT system based on BDS[J]. Scientia Sinica (Terrae), 2023, 53(5): 917-927. | |
| [2] | REN Xia, YANG Yuanxi. Development of comprehensive PNT and resilient PNT[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 1-8. |
| [3] | WANG Shoude, AHMAD N S. A comprehensive review on sensor fusion techniques for localization of a dynamic target in GPS-denied environments[J]. IEEE Access, 2025, 13: 2252-2285. |
| [4] | VAN GOOR P, HAMEL T, MAHONY R. Synchronous observer design for inertial navigation systems with almost-global convergence[J]. Automatica, 2025, 177: 112328. |
| [5] | WANG Jian, HAN Houzeng, LIU Fei, et al. Performance analysis of GNSS/MIMU tight fusion positioning model with complex scene feature constraints[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(2): 1-13. |
| [6] | NIU Xiaoji, DAI Yuhang, LIU Tianyi, et al. Feature-based GNSS positioning error consistency optimization for GNSS/INS integrated system[J]. GPS Solutions, 2023, 27(2): 89. |
| [7] | YUE Xiangdi, ZHANG Yihuan, CHEN Jiawei, et al. LiDAR-based SLAM for robotic mapping: state of the art and new frontiers[J]. Industrial Robot: the International Journal of Robotics Research and Application, 2024, 51(2): 196-205. |
| [8] | YAN Li, DAI Jicheng, TAN Junxiang, et al. Global fine registration of point cloud in LiDAR SLAM based on pose graph[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(2): 26-35. |
| [9] | JIA Xiang, NING Yipeng, CHAI Dashuai, et al. EGLT-SLAM: real-time visual-inertial SLAM based on entropy-guided line tracking[J]. IEEE Sensors Journal, 2024, 24(20): 32757-32771. |
| [10] | LEE D, JUNG M, YANG W, et al. LiDAR odometry survey: recent advancements and remaining challenges[J]. Intelligent Service Robotics, 2024, 17(2): 95-118. |
| [11] | 郭永强, 于喜志, 黄晓芬, 等. UWB定位应用综述[J]. 数字技术与应用, 2023, 41(2): 32-37. |
| GUO Yongqiang, YU Xizhi, HUANG Xiaofen, et al. Overview of UWB positioning application[J]. Digital Technology & Application, 2023, 41(2): 32-37. | |
| [12] | YU Baoguo, HUANG Lu, BAO Yachuan, et al. Research status and trends of indoor positioning and navigation technology in China[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 87-101. |
| [13] | WANG Sen, DAI Peipei, XU Tianhe, et al. Application of variational Bayesian-based cubature information filter for UWB/INS tightly coupled positioning system[J]. Measurement Science and Technology, 2025, 36(4): 046302. |
| [14] | ZHU Feng, XU Zhuo, ZHANG X, et al. On state estimation in multi-sensor fusion navigation: optimization and filtering[EB/OL]. [2025-07-22]. https://arxiv.org/abs/2401.05836. |
| [15] | ZHU Jiaming, ZHOU Han, WANG Ziyi, et al. Improved multi-sensor fusion positioning system based on GNSS/LiDAR/vision/IMU with semi-tight coupling and graph optimization in GNSS challenging environments[J]. IEEE Access, 2023, 11: 95711-95723. |
| [16] | LI Xingxing, ZHANG Xiaohong, NIU Xiaoji, et al. Progress and achievements of multi-sensor fusion navigation in China during 2019—2023[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 102-114. |
| [17] | 朱锋. GNSS/SINS/视觉多传感器融合的精密定位定姿方法与关键技术[D]. 武汉: 武汉大学, 2019. |
| ZHU Feng. Precise positioning and orientation methods and key technologies for GNSS/SINS/vision multi-sensor fusion[D]. Wuhan: Wuhan University, 2019. | |
| [18] | WANG Xuyin, GAO Fangzheng, HUANG Jiacai, et al. UWB/LiDAR tightly coupled positioning algorithm based on ISSA optimized particle filter[J]. IEEE Sensors Journal, 2024, 24(7): 11217-11228. |
| [19] | DAI Peipei, WANG Sen, XU Tianhe, et al. BDS-3 RTK/UWB semi-tightly coupled integrated positioning system in harsh environments[J]. Measurement Science and Technology, 2024, 35(3): 036306. |
| [20] | XU Xiaobin, ZHANG Lei, YANG Jian, et al. A review of multi-sensor fusion SLAM systems based on 3D LiDAR[J]. Remote Sensing, 2022, 14(12): 2835. |
| [21] | SHAN Tixiao, ENGLOT B, MEYERS D, et al. LIO-SAM: tightly-coupled LiDAR inertial odometry via smoothing and mapping[C]//Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 5135-5142. |
| [22] | QIN Chao, YE Haoyang, PRANATA C E, et al. LINS: a LiDAR-inertial state estimator for robust and efficient navigation[C]//Proceedings of 2020 IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 8899-8906. |
| [23] | XU Wei, CAI Yixi, HE Dongjiao, et al. FAST-LIO2: fast direct LiDAR-inertial odometry[J]. IEEE Transactions on Robotics, 2022, 38(4): 2053-2073. |
| [24] | WU Yibin, GUADAGNINO T, WIESMANN L, et al. LIO-EKF: high frequency LiDAR-inertial odometry using extended Kalman filters[C]//Proceedings of 2024 IEEE International Conference on Robotics and Automation. Yokohama: IEEE, 2024: 13741-13747. |
| [25] | JI Pengfei, DUAN Zhongxing, XU Weisheng. A combined UWB/IMU localization method with improved CKF[J]. Sensors, 2024, 24(10): 3165. |
| [26] | SUN Wei, ZHANG Heming, DING Wei, et al. UWB/IMU integrated indoor positioning algorithm based on robust extended Kalman filter[J]. Measurement Science and Technology, 2025, 36(1): 016303. |
| [27] | ZHU Wenjie, ZHAO Rongyong, ZHANG Hao, et al. Improved indoor positioning model based on UWB/IMU tight combination with double-loop cumulative error estimation[J]. Applied Sciences, 2023, 13(18): 10046. |
| [28] | FAN Zheng, ZHANG Lele, WANG Xueyi, et al. LiDAR, IMU, and camera fusion for simultaneous localization and mapping:a systematic review[J]. Artificial Intelligence Review, 2025, 58(6): 174. |
| [29] | FAN Jinlong, NING Yipeng, WANG Jian, et al. EMS-SLAM: dynamic RGB-D SLAM with semantic-geometric constraints for GNSS-denied environments[J]. Remote Sensing, 2025, 17(10): 1691. |
| [30] | DELLENBACH P, DESCHAUD J E, JACQUET B, et al. CT-ICP: real-time elastic LiDAR odometry with loop closure[C]//Proceedings of 2022 International Conference on Robotics and Automation. Philadelphia: IEEE, 2022: 5580-5586. |
| [31] | QIAN Zhentian, FU Jie, XIAO Jing. Towards accurate loop closure detection in semantic SLAM with 3D semantic covisibility graphs[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2455-2462. |
| [32] | WEN Weisong, HSU L T. AGPC-SLAM: absolute ground plane constrained 3D LiDAR SLAM[J]. NAVIGATION: Journal of the Institute of Navigation, 2022, 69(3): navi.527. |
| [33] | KUANG Yujin, HU Tongfei, OUYANG Mujiao, et al. Tightly coupled LiDAR/IMU/UWB fusion via resilient factor graph for quadruped robot positioning[J]. Remote Sensing, 2024, 16(22): 4171. |
| [34] | ZHANG Tisheng, YUAN Man, WEI Linfu, et al. MR-ULINS: a tightly-coupled UWB-LiDAR-inertial estimator with multi-epoch outlier rejection[J]. IEEE Robotics and Automation Letters, 2024, 9(12): 11786-11793. |
| [35] | XIN Rui, GUO Ningyan, MA Xingyu, et al. RLI-SLAM: fast robust ranging-LiDAR-inertial tightly-coupled localization and mapping[J]. Sensors, 2024, 24(17): 5672. |
| [36] | 徐爱功, 高佳鑫, 隋心, 等. 惯性测量单元辅助的LiDAR动态点云剔除方法[J]. 测绘科学, 2023, 48(5): 173-182. |
| XU Aigong, GAO Jiaxin, SUI Xin, et al. IMU-assisted LiDAR dynamic point cloud elimination method[J]. Science of Surveying and Mapping, 2023, 48(5): 173-182. | |
| [37] | XU Wei, ZHANG Fu. FAST-LIO: a fast, robust LiDAR-inertial odometry package by tightly-coupled iterated Kalman filter[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 3317-3324. |
| [38] | ZHANG Jiashi, ZHANG Chengyang, WU Jun, et al. LiDAR-inertial 3D SLAM with plane constraint for multi-story building[EB/OL]. [2025-07-22]. https://arxiv.org/abs/2202.08487. |
| [39] | NGUYEN T H, YUAN Shenghai, XIE Lihua. VR-SLAM: a visual-range simultaneous localization and mapping system using monocular camera and ultra-wideband sensors[EB/OL]. [2025-07-22]. https://arxiv.org/abs/2303.10903. |
| [40] | 徐爱功, 王鹏语, 隋心, 等. 非视距环境下基于PSO-SVM和RAIM的UWB定位方法[J]. 测绘科学, 2023, 48(4): 1-9, 45. |
| XU Aigong, WANG Pengyu, SUI Xin, et al. UWB localization method based on PSO-SVM and RAIM in NLOS environment[J]. Science of Surveying and Mapping, 2023, 48(4): 1-9, 45. | |
| [41] | 隋心, 马昊楠, 王长强, 等. 基于LiDAR点云的UWB NLOS识别及室内融合定位算法[J]. 地球信息科学学报, 2024, 26(12): 2686-2700. |
| SUI Xin, MA Haonan, WANG Changqiang, et al. Recognition of UWB NLOS in LiDAR point clouds and indoor fusion positioning algorithm[J]. Journal of Geo-information Science, 2024, 26(12): 2686-2700. | |
| [42] | 马杰, 王雯, 邓辰龙, 等. 动态观测权调整的GNSS/INS抗差因子图优化算法[J/OL]. 武汉大学学报(信息科学版), 1-16[2025-07-22]. https://doi.org/10.13203/j.whugis20240493. |
| MA Jie, WANG Wen, DENG Chenlong, et al. GNSS/INS robust factor graph optimization algorithm with dynamic observation weight adjustment[J/OL]. Geomatics and Information Science of Wuhan University, 1-16[2025-07-22]. https://doi.org/10.13203/j.whugis20240493. | |
| [43] | IM G. Notes on various errors and Jacobian derivations for SLAM[EB/OL]. [2025-07-22]. https://arxiv.org/abs/2406.06422. |
| [44] | CHEN Kai, ZHAN Kai, PANG Fan, et al. R-LIO: rotating lidar inertial odometry and mapping[J]. Sustainability, 2022, 14(17): 10833. |
| [45] | TANG Hailiang, ZHANG Tisheng, NIU Xiaoji, et al. FF-LINS: a consistent frame-to-frame solid-state-LiDAR-inertial state estimator[J]. IEEE Robotics and Automation Letters, 2023, 8(12): 8525-8532. |
| [1] | 周瑞, 朱锋, 张小红. 基于先验位姿与运动编排的相机惯导外参标定方法[J]. 测绘学报, 2026, 55(3): 465-476. |
| [2] | 吴唯同, 陈驰, 杨必胜, 何秀凤. 退化场景稳健的激光雷达、毫米波雷达与惯性融合里程计方法[J]. 测绘学报, 2025, 54(9): 1677-1686. |
| [3] | 万杰, 谢忠, 徐永洋, 陶留锋. 面向城市道路场景的车载LiDAR点云语义分割U形图卷积网络方法[J]. 测绘学报, 2025, 54(7): 1280-1293. |
| [4] | 宿殿鹏, 王斌, 买小争, 孟煌, 亓超, 阳凡林. 面向无现场控制的机载测深LiDAR安置角误差检校[J]. 测绘学报, 2025, 54(6): 1042-1053. |
| [5] | 徐联中, 陈传法, 陈东兴, 王兴杰, 杨子明, 杨淑凡, 洪壮壮, 郝劲达. 顾及地形特征的大规模机载LiDAR点云高效滤波方法[J]. 测绘学报, 2025, 54(6): 1082-1093. |
| [6] | 高浩龙, 李邵波, 赵建虎. 镜像结构和强度特征约束的海岸带LiDAR点云多路径负异常点去除方法[J]. 测绘学报, 2025, 54(5): 840-852. |
| [7] | 邵克凡, 李增科, 孙猛, 刘振彬, 吴祺. 智能手机多源数据融合增强的地磁SLAM方法[J]. 测绘学报, 2025, 54(10): 1812-1825. |
| [8] | 李朋飞, 李豆, 胡晋飞, 姚顽强, 臧宇哲. 机载LiDAR监测黄土高原土壤侵蚀的能力评估[J]. 测绘学报, 2023, 52(8): 1342-1354. |
| [9] | 宿殿鹏, 闫豆豆, 陈亮, 陈雨, 董箭, 吴迪, 于孝林. 机载LiDAR测深点云SVB联合滤波算法[J]. 测绘学报, 2023, 52(4): 614-623. |
| [10] | 郭娇娇, 陈传法, 姚喜, 刘妍, 刘雅婷, 刘盼盼. 基于多特征聚类的复杂环境机载点云层次滤波方法[J]. 测绘学报, 2023, 52(10): 1724-1737. |
| [11] | 卞鸿巍, 文者, 马恒, 王荣颖. 惯导极区模拟测试船用IMU转换修正误差公式简化与分析[J]. 测绘学报, 2022, 51(9): 1890-1898. |
| [12] | 王铉彬, 李星星, 廖健驰, 冯绍权, 李圣雨, 周宇轩. 基于图优化的紧耦合双目视觉/惯性/激光雷达SLAM方法[J]. 测绘学报, 2022, 51(8): 1744-1756. |
| [13] | 陈锐志, 钱隆, 牛晓光, 徐诗豪, 陈亮, 裘超. 基于数据与模型双驱动的音频/惯性传感器耦合定位方法[J]. 测绘学报, 2022, 51(7): 1160-1171. |
| [14] | 张小红, 周宇辉, 朱锋, 胡昊杰. 参数自主学习的车辆运动约束新模型及其惯性推算误差抑制分析[J]. 测绘学报, 2022, 51(7): 1249-1258. |
| [15] | 张良培, 何江, 杨倩倩, 肖屹, 袁强强. 数据驱动的多源遥感信息融合研究进展[J]. 测绘学报, 2022, 51(7): 1317-1337. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||