

Acta Geodaetica et Cartographica Sinica ›› 2024, Vol. 53 ›› Issue (4): 666-676.doi: 10.11947/j.AGCS.2024.20230323
• Geodesy and Navigation • Previous Articles Next Articles
Yingzong LIN1,2,3( ), Xiaomin LUO1,2(), Junfeng DU4
), Xiaomin LUO1,2(), Junfeng DU4
Received:2023-08-08
Revised:2024-02-18
Published:2024-05-13
Contact:
Xiaomin LUO
E-mail:Linyzz@whu.edu.cn;luoxiaomin@cug.edu.cn
About author:LIN Yingzong (2000—), male, postgraduate, majors in satellite navigation positioning. E-mail: Linyzz@whu.edu.cn
Supported by:CLC Number:
Yingzong LIN, Xiaomin LUO, Junfeng DU. Fitting improvement of PPP receiver tracking error stochastic model for high latitudes[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(4): 666-676.
Fig. 1
Distribution of ISMR stations in CHAIN"
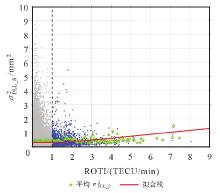
Fig. 2
Distribution of and ROTI using the data collected at all measurement stations of CHAIN from February 7, 2014 to December 31, 2022"
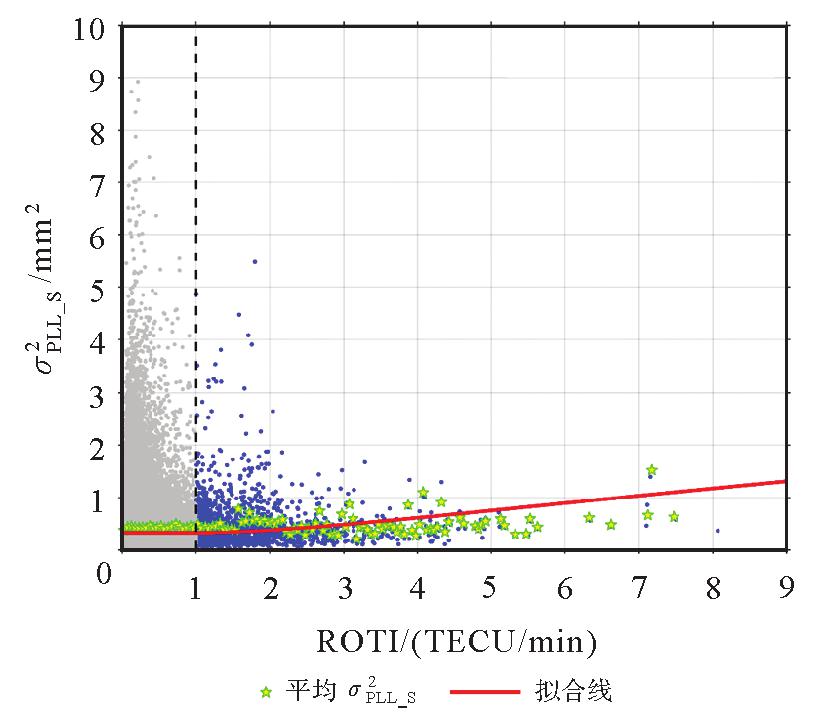
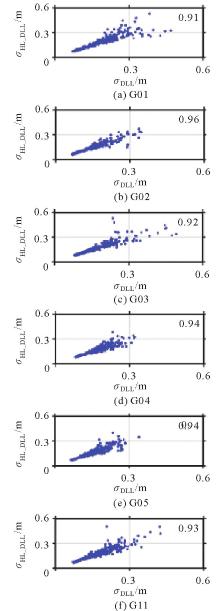
Fig. 3
Distribution of σDLL and σHL_DLL for partial GPS satellite in the RTES and HL_RTES model on February 15, 2023"
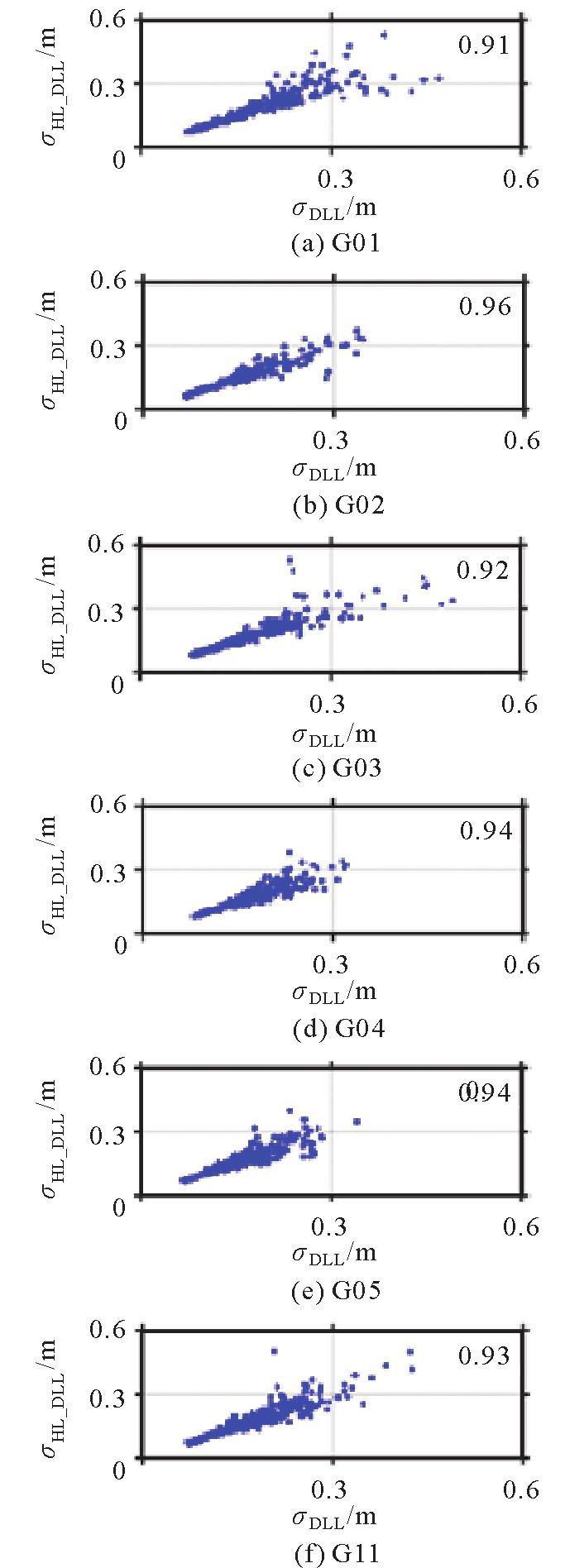
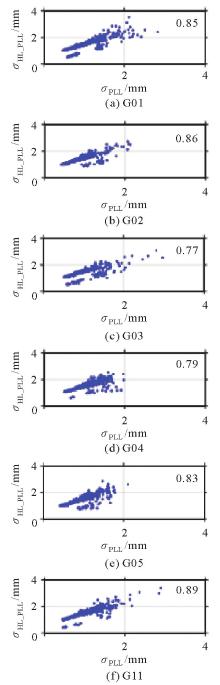
Fig. 4
Distribution of σPLL and σHL_PLL for partial GPS satellite in the RTES and HL_RTES model on February 15, 2023"
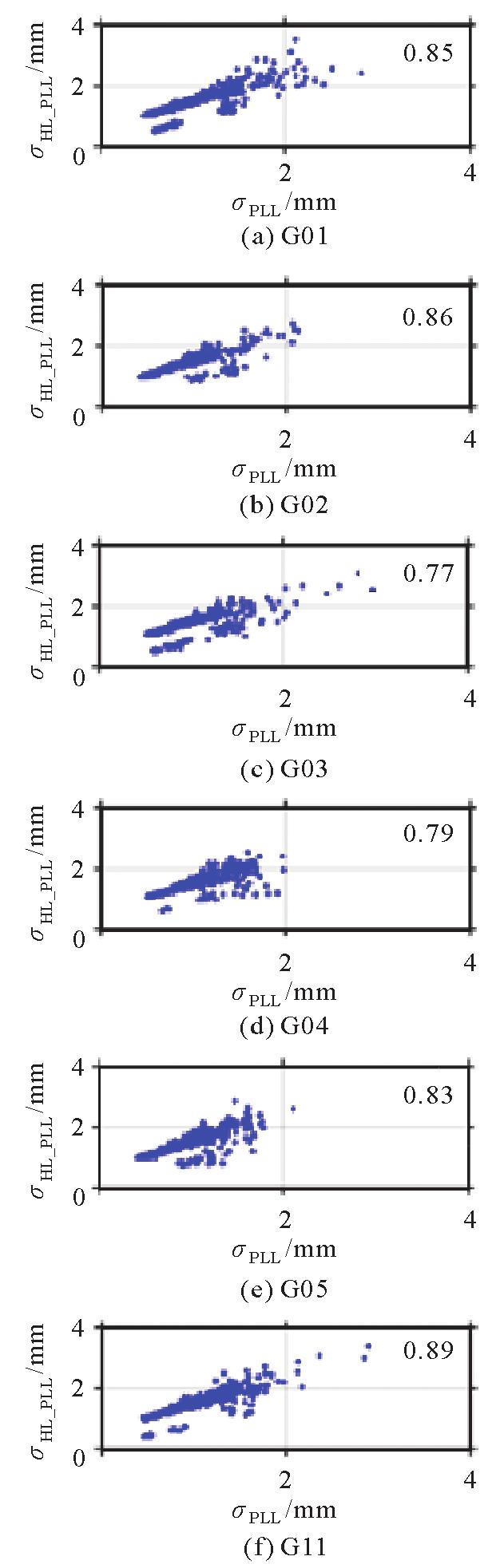
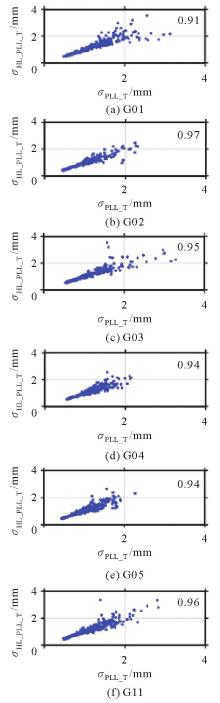
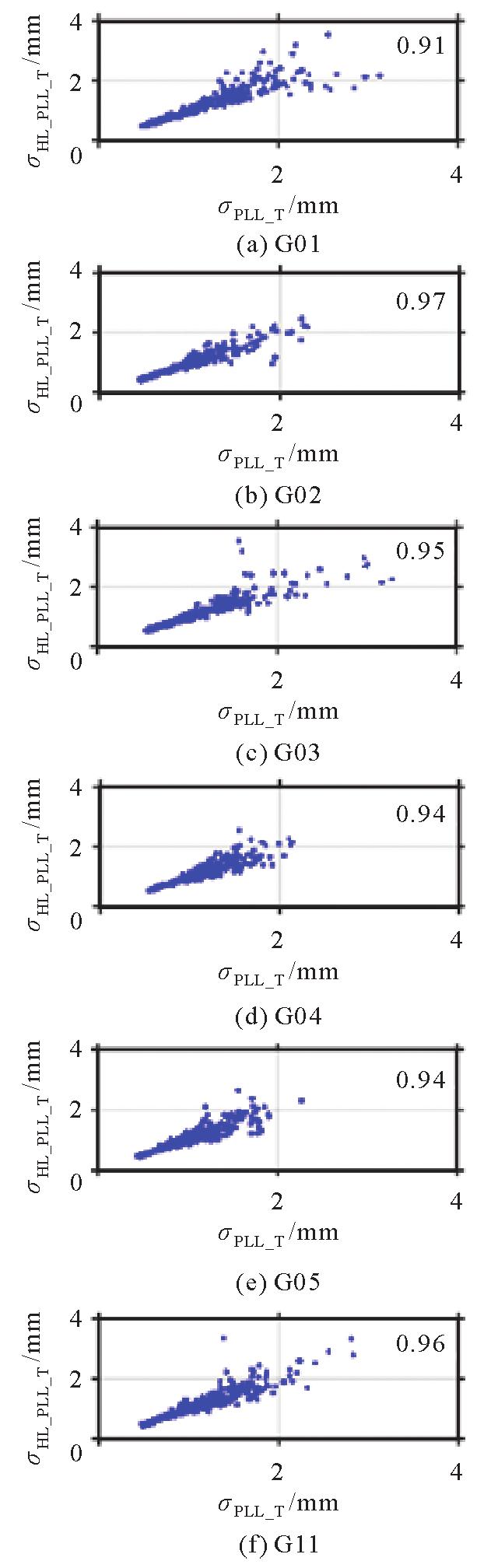
Fig. 5
Distribution of σPLL_T and σHL_PLL_T for partial GPS satellite in the RTES and HL_RTES model on February 15, 2023"
Tab. 1
Single frequency GPS kinematic PPP strategies"
| 项目 | 策略 |
|---|---|
| 观测数据 | L1频率的伪距和载波相位观测数据 |
| 采样间隔/s | 30 |
| 截止高度角/(°) | 10 |
| 精密卫星轨道 | IGS精密产品星历 |
| 精密卫星钟差 | IGS精密产品钟差 |
| 差分码偏差 | CODE产品 |
| 相位缠绕 | 已经校正[ |
| 天线相位中心偏移 | igs14.atx |
| 天线相位中心变化 | igs14.atx |
| 电离层延迟 | 作为参数进行估计 |
| 对流层延迟 | 使用Saastamoinen模型,其余部分作为随机游走进行估计 |
| 接收机坐标 | 作为白噪声进行估计和建模 |
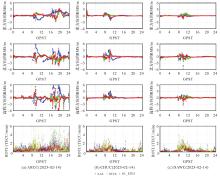
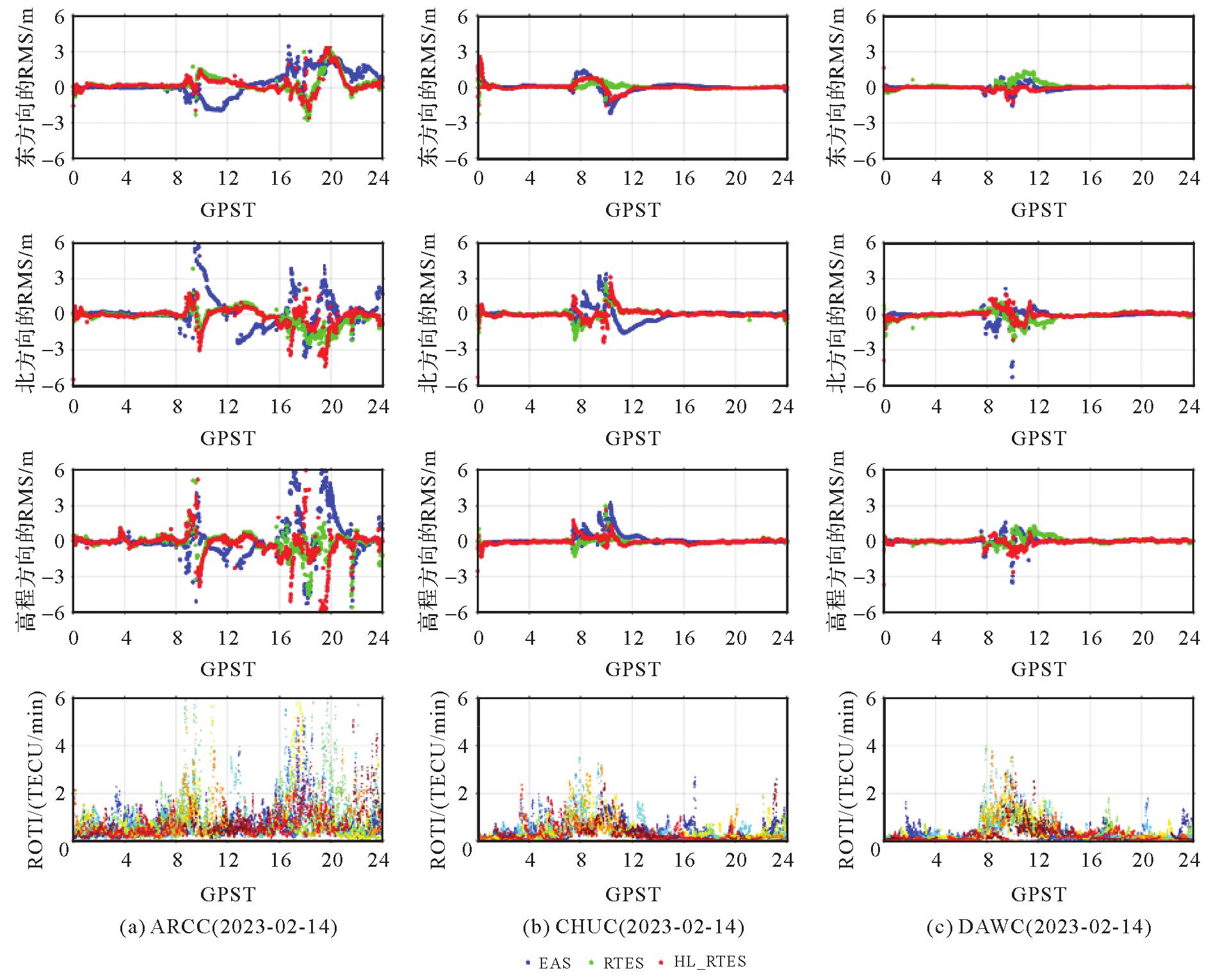
Fig. 6
Positioning errors of the single-frequency kinematic PPP based on EAS, RTES, and HL_RTES using ARCC, CHUC and DAWC station data on February 14 in 2023, respectively"
Tab. 2
RMS of the single-frequency kinematic PPP based on EAS, RTES and HL_RTES"
| 测站 | 模型 | RMS | |||
|---|---|---|---|---|---|
| 东方向 | 北方向 | 高程方向 | 3D方向 | ||
| ARCC | EAS | 0.728 | 0.673 | 0.851 | 0.754 |
| RTES | 0.255 | 0.344 | 0.509 | 0.384 | |
| HL_RTES | 0.253 | 0.453 | 0.767 | 0.535 | |
| CHUC | EAS | 0.446 | 0.614 | 0.492 | 0.522 |
| RTES | 0.144 | 0.379 | 0.236 | 0.271 | |
| HL_RTES | 0.304 | 0.387 | 0.260 | 0.321 | |
| DAWC | EAS | 0.213 | 0.425 | 0.316 | 0.320 |
| RTES | 0.307 | 0.398 | 0.286 | 0.334 | |
| HL_RTES | 0.146 | 0.316 | 0.245 | 0.246 | |

Fig. 7
RMS of single-frequency kinematic PPP based on EAS, RTES, and HL_RTES models from February 1 to February 28 in 2023"
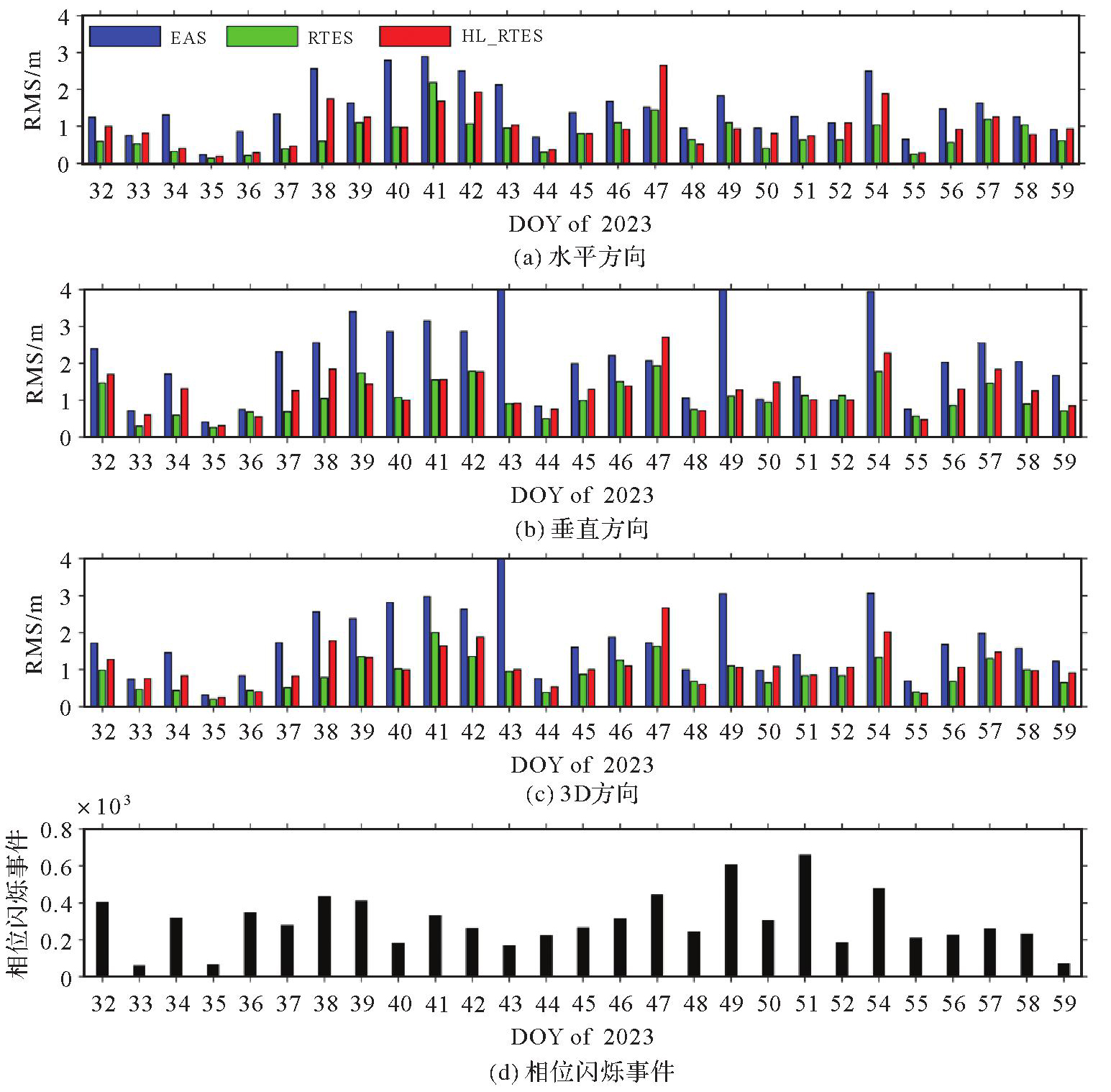
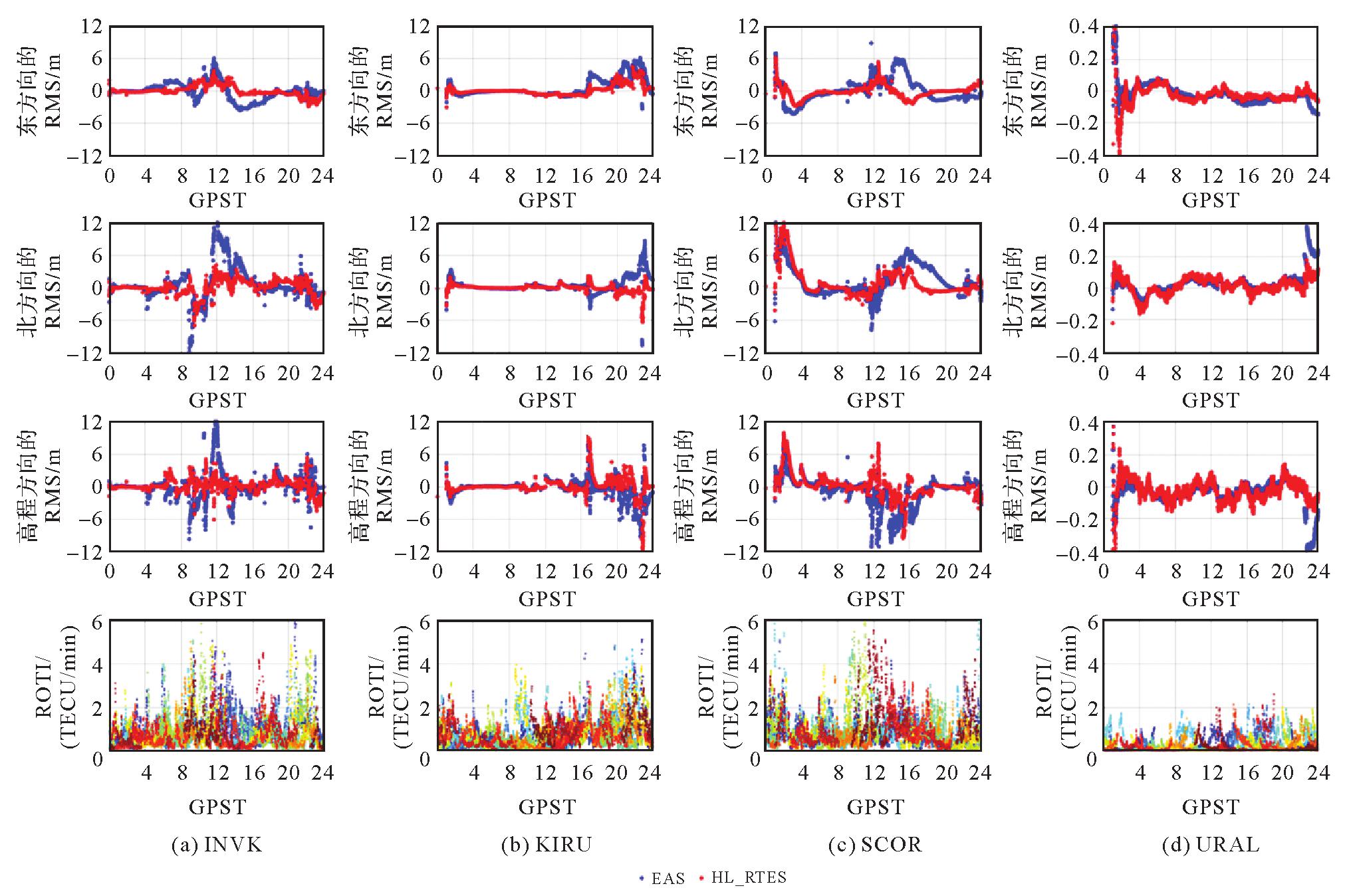
Fig. 8
Positioning errors of the single-frequency kinematic PPP based on EAS and HL_RTES using the GPS data collected at INVK, KIRU, SCOR and URAL stations installed with common geodetic receivers on February 15, 2023"
| [1] | 袁运斌, 霍星亮, 张宝成. 近年来我国GNSS电离层延迟精确建模及修正研究进展[J]. 测绘学报, 2017, 46(10):1364-1378. DOI: 10.11947/j.AGCS.2017.20170349. |
| YUAN Yunbin, HUO Xingliang, ZHANG Baocheng. Research progress of precise models and correction for GNSS ionospheric delay in China over recent years[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10):1364-1378. DOI: 10.11947/j.AGCS.2017.20170349. | |
| [2] | BASU S, MACKENZIE E, BASU S. Ionospheric constraints on VHF/UHF communications links during solar maximum and minimum periods[J]. Radio Science, 1988, 23(3):363-378. |
| [3] | AARONS J, MULLEN J P, WHITNEY H E, et al. The dynamics of equatorial irregularity patch formation, motion, and decay[J]. Journal of Geophysical Research: Space Physics, 1980, 85(A1):139-149. |
| [4] | FORTE B, RADICELLA S M. Problems in data treatment for ionospheric scintillation measurements[J]. Radio Science, 2002, 37(6):1096. |
| [5] | HYSELL D L, KUDEKI E. Collisional shear instability in the equatorial F region ionosphere[J]. Journal of Geophysical Research: Space Physics, 2004, 109(A11):A11301. |
| [6] | JIAO Yu, MORTON Y T. Comparison of the effect of high-latitude and equatorial ionospheric scintillation on GPS signals during the maximum of solar cycle 24[J]. Radio Science, 2015, 50(9):886-903. |
| [7] | GUO Kai, VADAKKE VEETTIL S, WEAVER B J, et al. Mitigating high latitude ionospheric scintillation effects on GNSS precise point positioning exploiting 1-s scintillation indices[J]. Journal of Geodesy, 2021, 95(3):30. |
| [8] | 汤俊, 高鑫, 李垠健, 等. 2018年8月磁暴期间北斗GEO卫星电离层TEC时空变化分析[J]. 测绘学报, 2022, 51(3):317-326. DOI: 10.11947/j.AGCS.2022.20210013. |
| TANG Jun, GAO Xin, LI Yinjian, et al. Spatial-temporal variations of the ionospheric TEC during the August 2018 geomagnetic storm by BeiDou GEO satellites[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(3):317-326. DOI: 10.11947/j.AGCS.2022.20210013. | |
| [9] | HAN S. Quality-control issues relating to instantaneous ambiguity resolution for real-time GPS kinematic positioning[J]. Journal of Geodesy, 1997, 71(6):351-361. |
| [10] | GENG Wei, HUANG Wengeng, LIU Guoqi, et al. Assessing the kinematic GPS positioning performance under the effect of strong ionospheric disturbance over China and adjacent areas during the magnetic storm[J]. Radio Science, 2022, 57(2):1-18. |
| [11] | SKONE S, KNUDSEN K, DE JONG M. Limitations in GPS receiver tracking performance under ionospheric scintillation conditions[J]. Physics and Chemistry of the Earth, Part A: Solid Earth and Geodesy, 2001, 26(6/7/8):613-621. |
| [12] | KLOBUCHAR J A. Ionospheric time-delay algorithm for single-frequency GPS users[J]. IEEE Transactions on Aerospace Electronic Systems, 1987, 23:325-331. |
| [13] | 李婧华, 马冠一. 电离层不规则结构对GPS性能的影响[J]. 空间科学学报, 2013, 33(2):158-169. |
| LI Jinghua, MA Guanyi. Effect of ionospheric irregularities on GPS performance[J]. Chinese Journal of Space Science, 2013, 33(2):158-169. | |
| [14] | BRIGGS B H, PARKIN I A. On the variation of radio star and satellite scintillations with zenith angle[J]. Journal of Atmospheric and Terrestrial Physics, 1963, 25(6):339-366. |
| [15] | YEH K C, LIU Chaohan. Radio wave scintillations in the ionosphere[J]. Proceedings of the IEEE, 1982, 70(4):324-360. |
| [16] | PI X, MANNUCCI A J, LINDQWISTER U J, et al. Monitoring of global ionospheric irregularities using the Worldwide GPS Network[J]. Geophysical Research Letters, 1997, 24(18):2283-2286. |
| [17] | PI X, MANNUCCI A, VALANT-SPAIGHT B, et al. Observations of global and regional ionospheric irregularities and scintillation using GNSS tracking networks[C]//Proceedings of the ION 2013 Pacific PNT Meeting. Honolulu: ION, 2013: 752-761. |
| [18] | YANG Zhe, LIU Zhizhao. Correlation between ROTI and Ionospheric Scintillation Indices using Hong Kong low-latitude GPS data[J]. GPS Solutions, 2016, 20(4):815-824. |
| [19] | SANZ J, JUAN J, GONZÁLEZ-CASADO G. Novel ionospheric activity indicator specifically tailored for GNSS users[C]//Proceedings of 2014 International Technical Meeting of the Satellite Division of the Institute of Navigation. Tampa: ION, 2014: 1173-1182. |
| [20] | JUAN J M, ARAGON-ANGEL A, SANZ J, et al. A method for scintillation characterization using geodetic receivers operating at 1 Hz[J]. Journal of Geodesy, 2017, 91(11):1383-1397. |
| [21] | AQUINO M, MONICO J F G, DODSON A H, et al. Improving the GNSS positioning stochastic model in the presence of ionospheric scintillation[J]. Journal of Geodesy, 2009, 83(10):953-966. |
| [22] | DA SILVA H A, DE OLIVEIRA CAMARGO P, GALERA MONICO J F, et al. Stochastic modelling considering ionospheric scintillation effects on GNSS relative and point positioning[J]. Advances in Space Research, 2010, 45(9):1113-1121. |
| [23] | CONKER R S, EL-ARINI M B, HEGARTY C J, et al. Modeling the effects of ionospheric scintillation on GPS/Satellite-based augmentation system availability[J]. Radio Science, 2003, 38(1):1-23. |
| [24] | DE OLIVEIRA MORAES A, COSTA E, DE PAULA E R, et al. Extended ionospheric amplitude scintillation model for GPS receivers[J]. Radio Science, 2014, 49(5):315-329. |
| [25] | YACOUB M D. The α-μ distribution: a physical fading model for the stacy distribution[J]. IEEE Transactions on Vehicular Technology, 2007, 56(1):27-34. |
| [26] | VADAKKE VEETTIL S, AQUINO M, MARQUES H A, et al. Mitigation of ionospheric scintillation effects on GNSS precise point positioning (PPP) at low latitudes[J]. Journal of Geodesy, 2020, 94(2):15. |
| [27] | LUO Xiaomin, GU Shengfeng, LOU Yidong, et al. Amplitude scintillation index derived from C/N0 measurements released by common geodetic GNSS receivers operating at 1 Hz[J]. Journal of Geodesy, 2020, 94(2):27. |
| [28] | JAYACHANDRAN P T, LANGLEY R B, MACDOUGALL J W, et al. Canadian high Arctic ionospheric network (CHAIN)[J]. Radio Science, 2009, 44(1):1-10. |
| [29] | VAN DIERENDONCK A, KLOBUCHAR J, HUA Q. Ionospheric scintillation monitoring using commercial single frequency C/A code receivers[C]//Proceedings of 1993 International Technical Meeting of the Satellite Division of the Institute of Navigation. Salt Lake City: ION, 1993: 1333-1342. |
| [30] | ZHOU Feng, DONG Danan, LI Weiwei, et al. GAMP: an open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations[J]. GPS Solutions, 2018, 22(2):1-10. |
| [31] | WU J T, WU S C, HAJJ G A, et al. Effects of antenna orientation on GPS carrier phase[J]. Manuscripta Geodaetica, 1993, 18(2):91-98. |
| [32] | 冯健, 甄卫民, 吴振森, 等. 极区电离层闪烁特征初步分析[J]. 电波科学学报, 2015, 30(2):232-236. |
| FENG Jian, ZHEN Weimin, WU Zhensen, et al. The preliminary study of ionospheric scintillation characteristics in polar region[J]. Chinese Journal of Radio Science, 2015, 30(2):232-236. |
| [1] | Jun LI, Huizhong ZHU, Zhiqiang LIU. An optimization method for ionospheric parameters in ambiguity resolution of BDS long-range reference station network [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(2): 221-232. |
| [2] | Yangyang LU, Huizhong ZHU, Bo LI, Jun LI, Aigong XU. PPP algorithm for multi-frequency GPS/Galileo/BDS-3 with IFCB time-varying characteristic constraints [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(2): 233-247. |
| [3] | Xinrui LI, Xuanyu QU, Qin ZHANG, Bao SHU, Lingen MENG, Hao XU, Shuangcheng ZHANG, Guanwen HUANG, Hanwen WU, Li WANG. A data-driven multipath error mitigation method for PPP-RTK and its application in deformation monitoring [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(12): 2168-2181. |
| [4] | Yupeng GU, Wanke LIU, Xiaohong ZHANG, Jie HU, Shujie HU, Weihao LEI, Kai ZHENG. Neural network-based GNSS stochastic model generation method by fisheye images [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(12): 2206-2218. |
| [5] | Chuang SHI, Chenlong DENG, Lei FAN, Fu ZHENG, Tao ZHANG, Yuan TIAN, Guifei JING, Jie MA. Positioning performance analysis and evaluation for standalone BDS receivers [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 1-13. |
| [6] | Jianhua CHENG, Sicheng CHEN, Nan ZANG, Sixiang CHENG, Guojing ZHAO, Zifan MA. PPP/INS tightly integrated enhancement model considering adaptive short-term height variation rate constraint [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(9): 1761-1776. |
| [7] | Liang LI, Liuqi WANG, Ningbo WANG, Min LI, Zishen LI, Fengze DU, Shuai PANG, Zhibo NA. Vectorized integrity monitoring method for PPP-RTK correction products [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(9): 1777-1789. |
| [8] | Dongsheng ZHAO, Xueli ZHANG, Shuanglei CUI, Qianxin WANG, Guanqing LI, Longjiang LI, Chendong LI, Kefei ZHANG. Accuracy assessment of ionospheric scintillation monitoring in high-latitude regions of the northern hemisphere utilizing geodetic GNSS receivers based on ROTI and AATR [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(7): 1251-1264. |
| [9] | YANG Ling, ZHU Jincheng, SUN Nan, YU Yangkang, SHEN Yunzhong, LI Bofeng. Stochastic model refinement of GNSS advanced receiver autonomous integrity monitoring [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(2): 286-295. |
| [10] | Jianghui GENG, Jihang LIN, Qiyuan ZHANG, Qiang WEN, Jing ZENG, Biao JIN. Phase clock/bias estimation for GNSS all-frequency undifferenced ambiguity resolution [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(12): 2254-2267. |
| [11] | ZHA Jiuping, ZHANG Baocheng, LIU Teng, ZHANG Xiao, HOU Pengyu, YUAN Yunbin, LI Zishen. Undifferenced and uncombined PPP-RTK aided by BDS-3 PPP-B2b precise orbits [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(9): 1449-1459. |
| [12] | HOU Pengyu, ZHANG Baocheng, LIU Teng, ZHA Jiuping. Regional PPP-RTK with CDMA+FDMA data at undifferenced and uncombined level [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(2): 183-194. |
| [13] | SHU Bao, LIU Hui, WANG Li, ZHANG Qin, HUANG Guanwen. PPP and RTK integrated service method and performance based on regional reference station network [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(9): 1870-1880. |
| [14] | ZHANG Baocheng, KE Cheng, ZHA Jiuping, HOU Pengyu, LIU Teng, YUAN Yunbin, LI Zishen. Undifferenced and uncombined PPP-RTK:algorithmic models,prototype terminals and field-test results [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(8): 1725-1735. |
| [15] | SHI Chuang, GU Shengfeng, LOU Yidong, ZHENG Fu, SONG Wei, ZHANG Dong, MAO Feiyu. Real-time wide-area precise positioning and precise timing service system [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(7): 1206-1214. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||