

Acta Geodaetica et Cartographica Sinica ›› 2025, Vol. 54 ›› Issue (1): 40-51.doi: 10.11947/j.AGCS.2025.20230488
• Geodesy and Navigation • Previous Articles Next Articles
Hongfa WAN( ), Shanshan LI(), Xinxing LI, Haopeng FAN, Xuli TAN
), Shanshan LI(), Xinxing LI, Haopeng FAN, Xuli TAN
Received:2023-11-01
Revised:2024-12-10
Online:2025-02-17
Published:2025-02-17
Contact:
Shanshan LI
E-mail:whf16638240173@163.com;zzy_lily@sina.com
About author:WAN Hongfa (1999—), male, PhD, majors in gravity-assisted inertial navigation. E-mail: whf16638240173@163.com
Supported by:CLC Number:
Hongfa WAN, Shanshan LI, Xinxing LI, Haopeng FAN, Xuli TAN. Simulation and accuracy analysis of real-time underwater gravity measurement data[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 40-51.
Tab. 1
Parameter settings"
| 仪器类别 | 惯导误差项(常值零偏) | 重力仪误差项(常值零偏) |
|---|---|---|
| 陀螺仪(x,y,z轴)/(°)/h | 0.002 | — |
| 水平加速度计(x,y轴)/mGal | 10 | 50 |
| 垂向加速度计(z轴)/mGal | 10 | 3 |

Fig. 1
Simulation results of gravity measurement error on a static base"

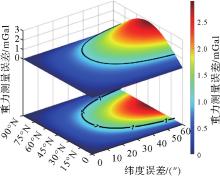
Fig. 2
The variation of normal gravity error with latitude and longitude errors"
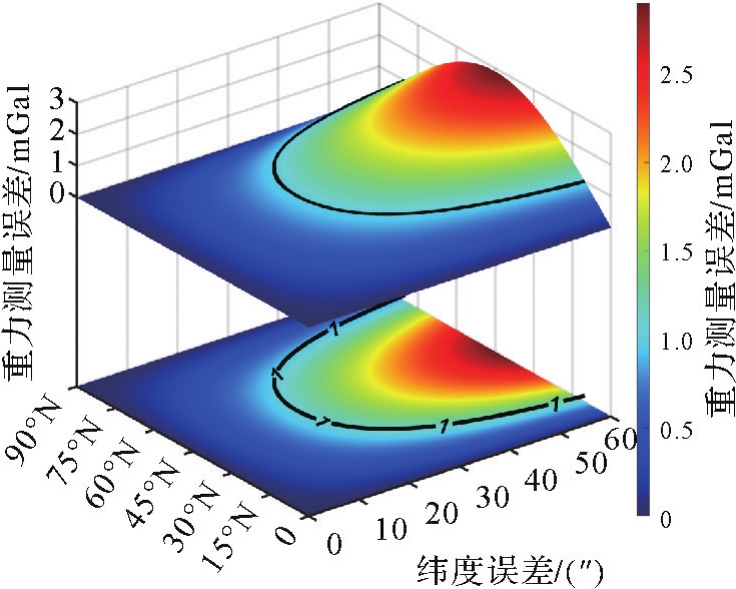
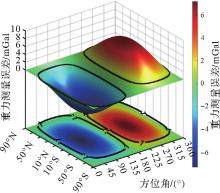
Fig. 3
The variation of gravity measurement error with latitude and azimuth"

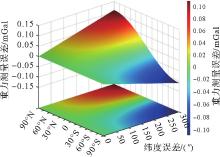
Fig. 4
The variation of gravity measurement errors with latitude and longitude errors"
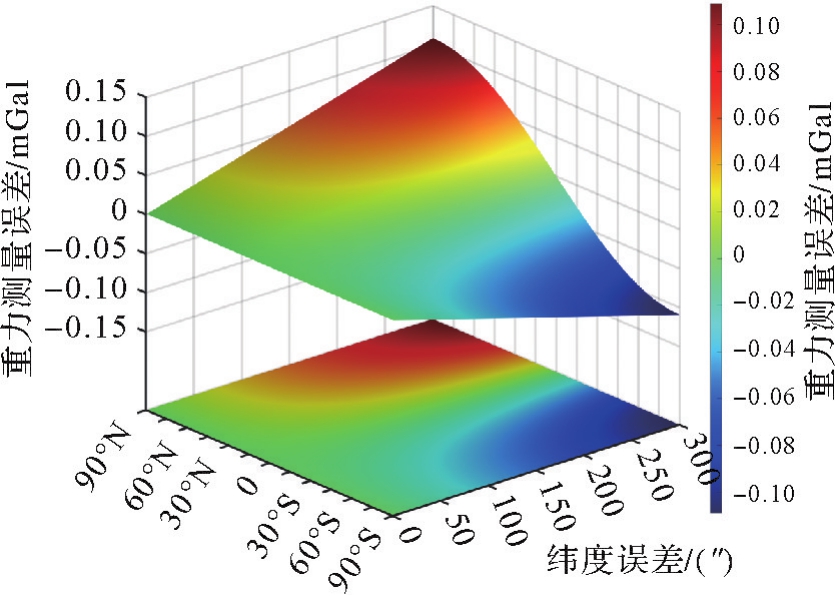
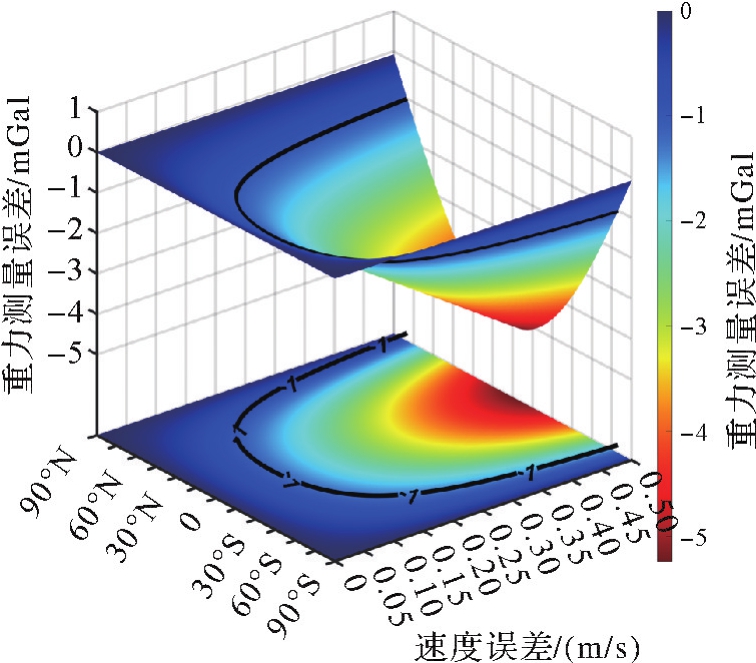
Fig. 5
The variation of gravity measurement error with latitude and velocity errors"
Tab. 2
Underwater gravity measurement trajectory parameters"
| 初始姿态/(°) | 初始速度/(m/s) | 初始坐标 | 航迹时长(世界时) |
|---|---|---|---|
| 俯仰角:0 | 东向:0 | 111.000°E | 2022年1月1日0时—24时 |
| 横滚角:0 | 天向:0 | 7.000°N | |
| 偏航角:0 | 北向:0 | 高程-100 m |
Tab. 3
Parameter settings for ocean gravimeter"
| 仪器类别 | 惯导误差项(常值零偏) | 重力仪误差项(常值零偏) | ||
|---|---|---|---|---|
| 常值零偏 | 随机游走 | 常值零偏 | 随机游走 | |
| 陀螺仪(x,y,z轴) | 0.002°/h |  | — | — |
| 水平加速度计(x,y轴) | 10 mGal |  | 50 mGal |  |
| 垂向加速度计(z轴) | 10 mGal |  | 3 mGal |  |
Fig. 6
Simulation trajectory of underwater dynamic gravity measurement"
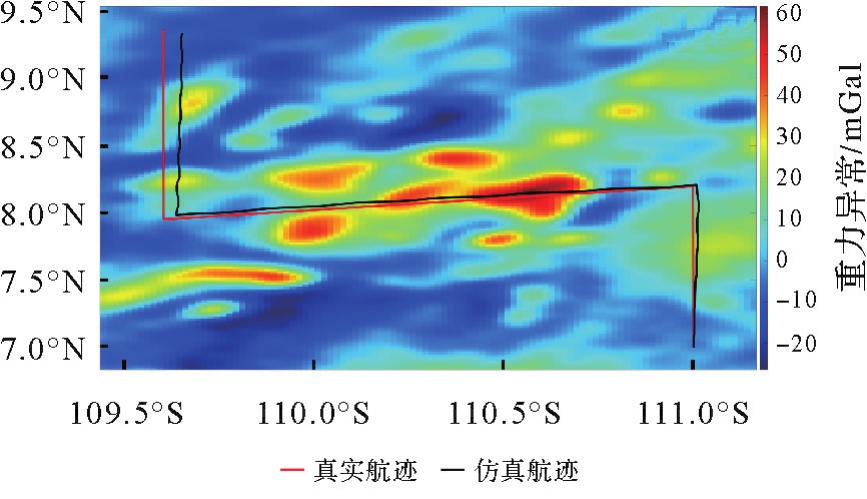
Fig. 7
Dynamic gravimeter specific force simulation results"
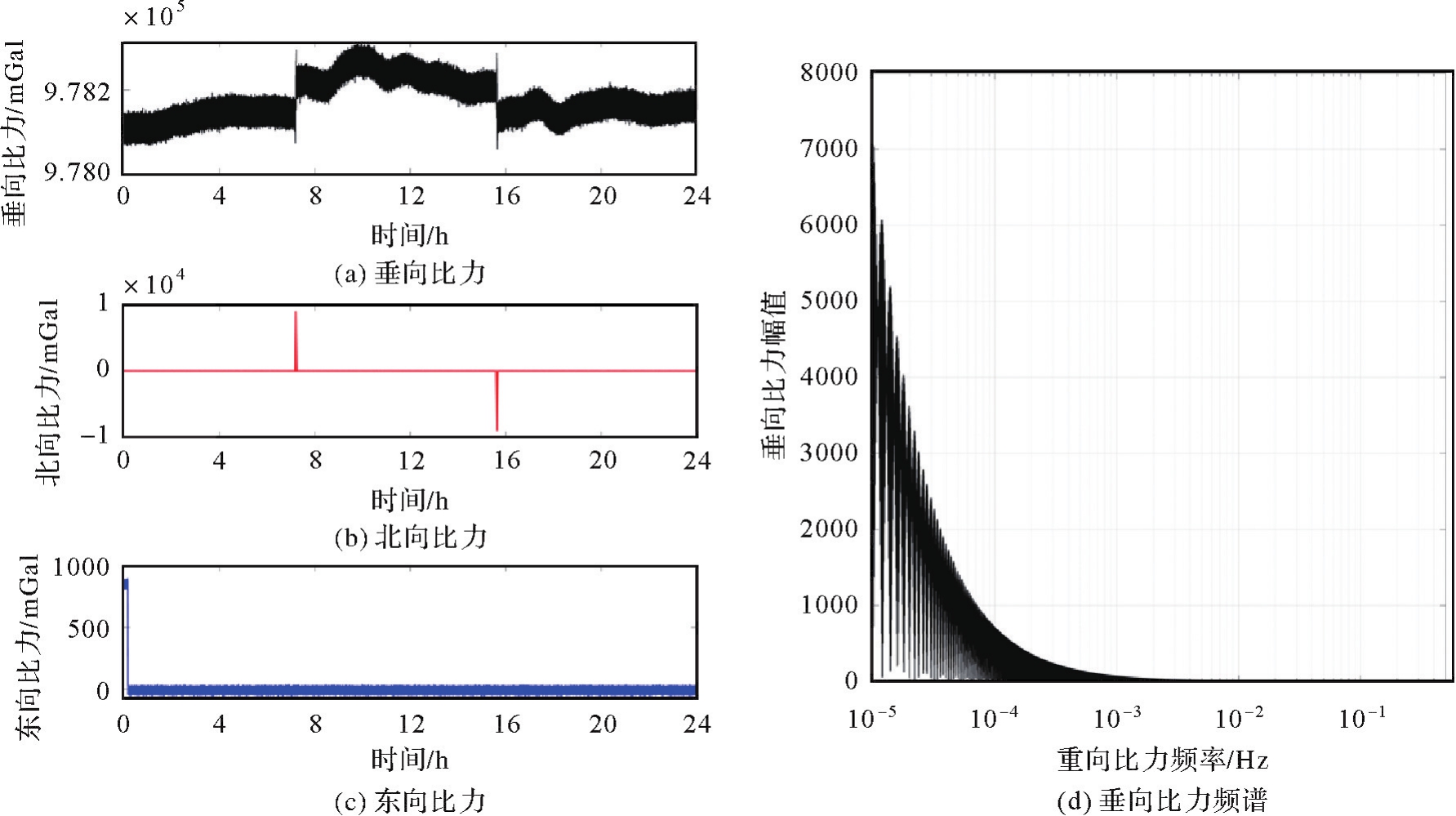

Fig. 8
Dynamic gravity measurement simulation results"

Fig. 9
Simulation experiment results of gravity earth tide from 0: 00 to 24: 00 on January 1, universal time 2022"

Fig. 10
Dynamic gravity measurement FIR filtering results"
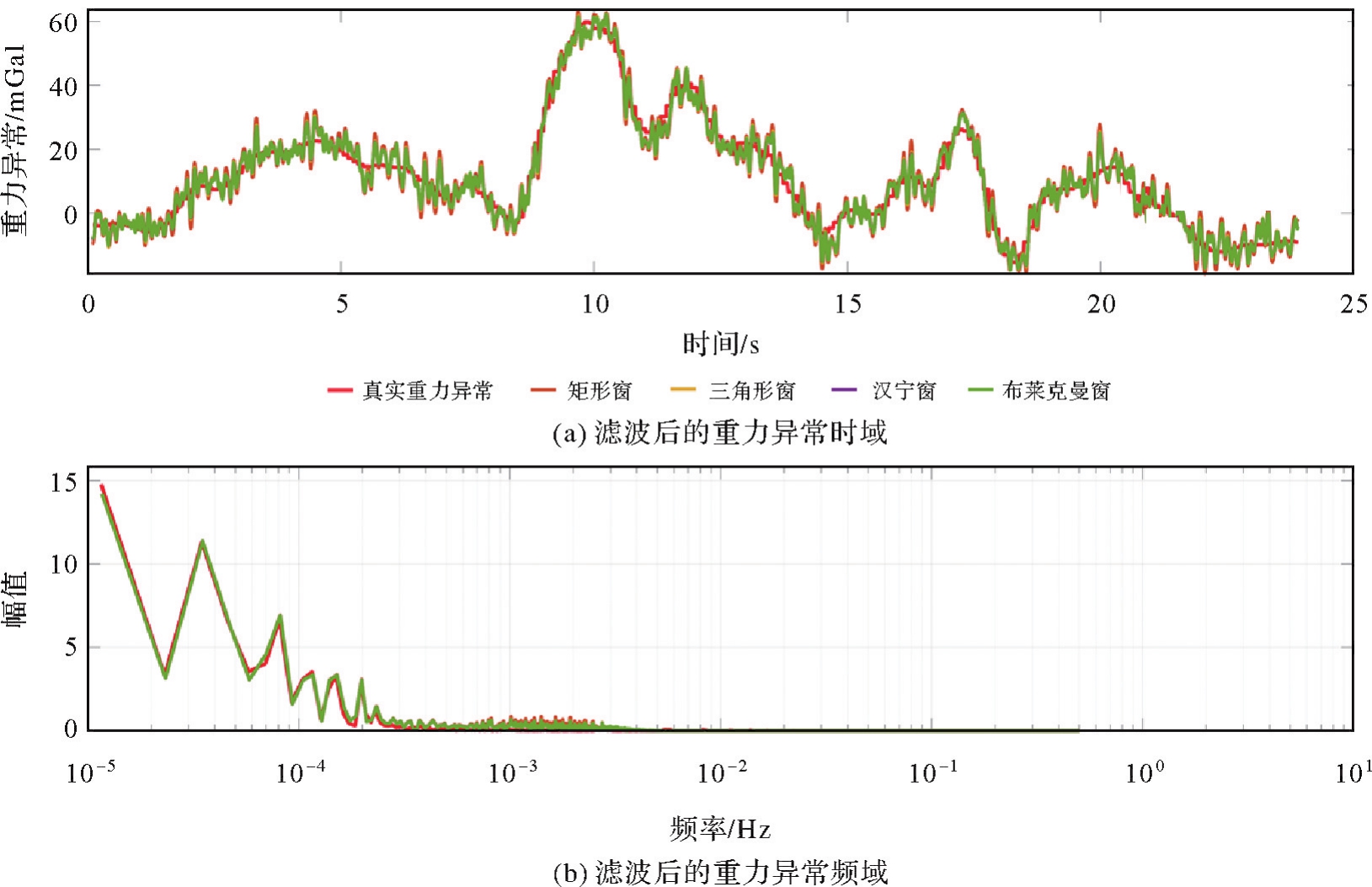
Tab. 4
Low pass filtering results of dynamic gravity measurement"
| 误差类型 | 平均误差/mGal | 最大值/mGal | 均方误差/mGal | 相关系数 |
|---|---|---|---|---|
| 矩形窗 | 21.147 8 | 15.926 6 | 4.270 5 | 0.967 0 |
| 三角形窗 | 21.148 2 | 13.987 5 | 3.647 2 | 0.975 6 |
| 汉宁窗 | 21.148 3 | 13.451 0 | 3.512 3 | 0.977 3 |
| 布莱克曼窗 | 21.148 4 | 13.436 8 | 3.510 3 | 0.977 3 |
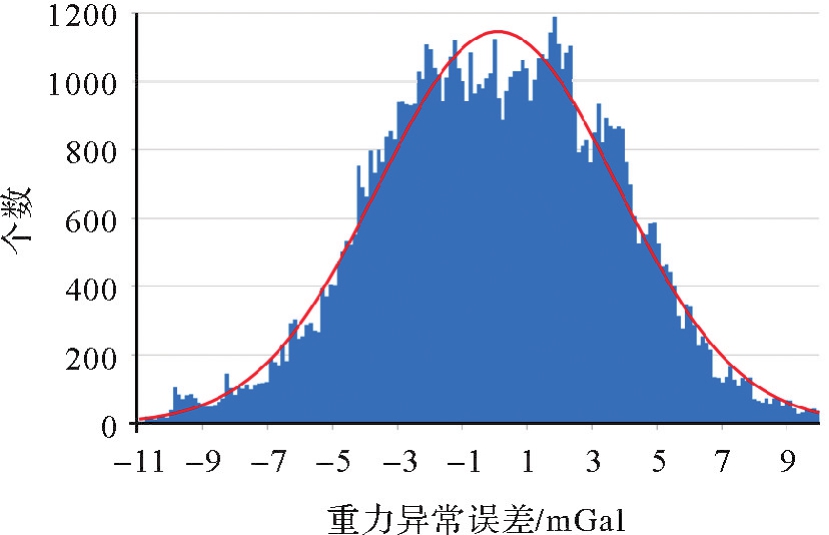
Fig. 11
Gravity anomaly error distribution statistics"
| [1] | WANG Yong, WU Lin, CHAI Hua, et al. Technology of gravity aided inertial navigation system and its trial in South China Sea[J]. IET Radar, Sonar & Navigation, 2016, 10(5): 862-869. |
| [2] | LIU Fanming, LI Fangming, JING Xin. INS/gravity gradient aided navigation based on gravitation field particle filter[J]. Open Physics, 2019, 17(1): 709-718. |
| [3] | 李姗姗. 水下重力辅助惯性导航的理论与方法研究[D]. 郑州: 信息工程大学, 2011. |
| LI Shanshan. Research on the theory and method of underwater gravity-aided inertial navigation[D]. Zhengzhou: Information Engineering University, 2011. | |
| [4] | WANG Wei, GAO Jinyao, LI Dongming, et al. Measurements and accuracy evaluation of a strapdown marine gravimeter based on inertial navigation[J]. Sensors, 2018, 18(11): 3902. |
| [5] | 李爱华. 动态矢量重力测量系统仿真研究[D]. 南京: 东南大学, 2017. |
| LI Aihua. Research and simulation of dynamic vector gravimetry system[D]. Nanjing: Southeast University, 2017. | |
| [6] |
CAI Tijing, FANG Ke. A new method for determining the gravity disturbance vector in strapdown airborne gravimetry[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71. DOI:.
doi: 10.1109/TIM.2022.3193168 |
| [7] | 刘超华, 赵勇, 杨俊东. 基于LabVIEW的重力仪仿真与测试系统设计[J]. 现代电子技术, 2011, 34(10): 182-185. |
| LIU Chaohua, ZHAO Yong, YANG Jundong. Simulation and test system of gravimeter based on LabVIEW[J]. Modern Electronics Technique, 2011, 34(10): 182-185. | |
| [8] | 汪凤林, 温秀兰, 林健, 等. RAPINS/GPS/L/重力仪海洋重力测量系统仿真[J]. 东南大学学报(自然科学版), 2010, 40(): 331-336. |
| WANG Fenglin, WEN Xiulan, LIN Jian, et al. Research and simulation on marine gravity measuring system of RAPINS/GPS/Gravimeter[J]. Journal of Southeast University (Natural Science Edition), 2010, 40(): 331-336. | |
| [9] | YU Dongyao, XIONG Zhiming, CAO Juliang, et al. Methods for underwater gravity measurement error compensations based on correlation analysis[J]. Applied Sciences, 2022, 12(20): 10511. |
| [10] | ZHANG Zhiqiang, LIU Zhongle, ZHANG Hongxin. Underwater mobile gravity measurement data processing using continuous-discrete Kalman filter[J]. AIP Advances, 2021, 11(8): 085104. |
| [11] | AI Wenyu, ZHONG Sheng, LENG Yue, et al. A real-time autonomous gravity measurement method for underwater gravity-aided navigation[J]. IEEE Access, 2023, 11: 135728-135737. |
| [12] | 王傲明, 李姗姗, 李新星, 等. 基于自适应并行扩展卡尔曼滤波的SITAN匹配算法[J]. 中国惯性技术学报, 2022, 30(1): 81-88. |
| WANG Aoming, LI Shanshan, LI Xinxing, et al. SITAN matching algorithm based on adaptive parallel extended Kalman filter[J]. Journal of Chinese Inertial Technology, 2022, 30(1): 81-88. | |
| [13] | 黄炎, 李姗姗, 谭勖立, 等. 基于地球重力场模型的重力匹配数据随机线性化方法[J]. 中国惯性技术学报, 2022, 30(3): 328-335. |
| HUANG Yan, LI Shanshan, TAN Xuli, et al. Random linearization method of gravity matching data based on earth gravity field model[J]. Journal of Chinese Inertial Technology, 2022, 30(3): 328-335. | |
| [14] | HUANG Motao, DENG Kailiang, WU Taiqi, et al. Research and evaluation on key technological indicators for airborne and shipborne gravimetry[J]. Journal of Geodesy and Geoinformation Science, 2020, 2(3): 44-54. |
| [15] | 王博, 李天姣, 李晓平. 水下惯性/重力梯度匹配导航综述[J]. 战术导弹技术, 2023(4): 1-12. |
| WANG Bo, LI Tianjiao, LI Xiaoping. Review of underwater inertial/gravity gradient matching navigation[J]. Tactical Missile Technology, 2023(4): 1-12. | |
| [16] | 万晓云, 吴云龙, 郭恒洋, 等. 基于重力场产品的水下匹配导航发展现状及影响因素分析[J]. 武汉大学学报(信息科学版), 2023, 48(6): 879-890. |
| WAN Xiaoyun, WU Yunlong, GUO Hengyang, et al. Development status and influencing factor analysis of underwater matching navigation based on gravity field products[J]. Geomatics and Information Science of Wuhan University (Natural Science Edition), 2023, 48(6): 879-890. | |
| [17] | 陈小炜, 姜广胜, 陈静. 蚁群算法在辅助导航重力匹配中的应用[J]. 空军工程大学学报, 2022, 23(6): 79-83. |
| CHEN Xiaowei, JIANG Guangsheng, CHEN Jing. The application of ant colony algorithm in gravity matching of aid navigation[J]. Journal of Air Force Engineering University, 2022, 23(6): 79-83. | |
| [18] | 孙中苗. 航空重力测量理论、方法及应用研究[D]. 郑州: 信息工程大学, 2005. |
| SUN Zhongmiao. Theory, methods and applications of airborne gravimetry[D]. Zhengzhou: Information Engineering University, 2005. | |
| [19] | 黄杨明. 高精度捷联式航空重力仪误差估计方法研究[D]. 长沙: 国防科学技术大学, 2015. |
| HUANG Yangming. Research on error estimation of precise strapdown airborne gravimeter[D]. Changsha: National University of Defense Technology, 2015. | |
| [20] | 严恭敏. 捷联惯导算法及车载组合导航系统研究[D]. 西安: 西北工业大学, 2004. |
| YAN Gongmin. Research on strapdown inertial navigation algorithm and vehicle integrated navigation system[D]. Xi'an: Northwestern Polytechnical University, 2004. | |
| [21] | 王福民, 叶宇星. S-Ⅱ型海洋重力仪介绍和使用方法[J]. 物探装备, 2007(3): 210-214. |
| WANG Fumin, YE Yuxing. Introduction S-II marine gravimeter and its usage[J]. Equipment for Geophysical Prospecting, 2007(3): 210-214. | |
| [22] | 付永涛, 王先超, 谢天峰. KSS31 M型海洋重力仪动态性能的分析[J]. 海洋科学, 2007(6): 29-33. |
| FU Yongtao, WANG Xianchao, XIE Tianfeng. Verifying the dynamic properties of KSS31M marine gravity-meter by the observed gravity reading and GPS data[J]. Marine Science, 2007(6): 29-33. | |
| [23] | 王傲明, 李姗姗, 范雕, 等. 水下惯性导航系统姿态算法的适用性分析[J]. 大地测量与地球动力学, 2022, 42(3): 281-285. |
| WANG Aoming, LI Shanshan, FAN Diao. Applicability analysis of attitude algorithm for underwater inertial navigation system[J]. Journal of Geodesy and Geodynamics, 2022, 42(3): 281-285. | |
| [24] | 魏子卿. 正常重力公式[J]. 测绘学报, 2003, 32(2): 95-101. |
| WEI Ziqing. Normal gravity formulae[J]. Acta Geodaetica et Cartographica Sinica, 2003, 32(2): 95-101. | |
| [25] | HINZE W J, AIKEN C, BROZENA J, et al. New standards for reducing gravity data: the north american gravity database[J]. Geophysics, 2005, 70(4): J25-J32. |
| [26] | 徐华君, 柳林涛, 罗孝文. 全球重力固体潮的仿真实现[J]. 系统仿真学报, 2009, 21(24): 7824-7827. |
| XU Huajun, LIU Lintao, LUO Xiaowen. Simulation of gravity earth tide[J]. Journal of System Simulation, 2009, 21(24): 7824-7827. | |
| [27] | 闫如玉, 万永革, 解朝娣, 等. 基于Matlab GUI的全球重力固体潮可视化实现[J]. 地震地磁观测与研究, 2019, 40(3): 160-167. |
| YAN Ruyu, WAN Yongge, XIE Chaodi, et al. Visualization of gravity earth tides based on Matlab GUI[J]. Seismological and Geomagnetic Observation and Research, 2019, 40(3): 160-167. | |
| [28] | CAI Yanhui, ZHANG Li, MA Xu. Using WGM2012 to compute gravity anomaly corrections of leveling observations in China[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(1): 88-94. |
| [29] | 张志强. 水下移动重力测量理论方法及应用研究[D]. 武汉: 武汉大学, 2021. |
| ZHANG Zhiqiang. Theory method and application of underwater mobile gravity measurement[D]. Wuhan: Wuhan University, 2021. | |
| [30] | 郎骏健, 梁星辉, 涂海波, 等. CHZ-Ⅱ海空重力仪格值标定[J]. 大地测量与地球动力学, 2020, 40(3): 323-326. |
| LANG Junjian, LIANG Xinghui, TU Haibo, et al. Calibration of scale value for CHZ-Ⅱ air-sea gravimeter[J]. Journal of Geodesy and Geodynamics, 2020, 40(3): 323-326. | |
| [31] | YUAN Yuan, WU Zhaocai, GAO Jinyao, et al. Establishing a marine gravimeter test site in the South China Sea to validate the performance of different marine gravimeters[J]. Remote Sensing, 2024, 17(1): 14. |
| [32] | 袁园, 高金耀, 高巍. 基于惯性稳定平台的ZL11-1A海洋重力仪性能评估[J]. 海洋测绘, 2021, 41(1): 22-26. |
| YUAN Yuan, GAO Jinyao, GAO Wei. A new shipborne gravimeter ZL11-1A based on inertial stabilization platform and its performance evaluation[J]. Hydroaphic Surveying and Charting, 2021, 41(1): 22-26. | |
| [33] | CAI Shaokun, ZHANG Kaidong, WU Meiping. Improving airborne strapdown vector gravimetry using stabilized horizontal components[J]. Journal of Applied Geophysics, 2013, 98: 79-89. |
| [34] | CAI Shaokun, TIE Junbo, ZHANG Kaidong, et al. Marine gravimetry using the strapdown gravimeter SGA-WZ[J]. Marine Geophysical Research, 2017, 38(4): 325-340. |
| [1] | Rui ZHOU, Feng ZHU, Xiaohong ZHANG. Camera-IMU extrinsic calibration based on prior poses and motion planning [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 465-476. |
| [2] | Yuanxi YANG, Xia REN, Qiang ZHANG, Mingqiang HOU, Dingbang XIAO, Lingxiao ZHU. The development and key technologies of quantum PNT [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(1): 1-9. |
| [3] | Gen LI, Hongzhou CHAI, Kaidi JIN, Zhao ZHAN. Underwater terrain matching method based on robust particle filter [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1841-1851. |
| [4] | ZHANG Panpan, WU Lin, BAO Lifeng, LI Qianqian, LIU Hui, XI Menghan, WANG Yong. Research on gravity compensation of inertial navigation system based on multispectral gravity disturbance [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(8): 1255-1267. |
| [5] | ZHU Ningning, YANG Bisheng, CHEN Chi, DONG Zhen. Position-attitude calculation of panoramic image based on point-line feature combination [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(2): 218-229. |
| [6] | BIAN Hongwei, WEN Zhe, MA Heng, WANG Rongying. Simplification and analysis of IMU conversion error formula for inertial navigation polar simulation test [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(9): 1890-1898. |
| [7] | XU Zhibin, LI Hongwei, ZHANG Bin, XIAO Zhiyuan, DENG Chen. Localization method of mobile robot based on binocular vision and inertial navigation [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1512-1521. |
| [8] | LI Qi, BAI Zhengdong, CHEN Bobo, GUO Jingjun, XIN Haohao, CHENG Yuhang, LI Qiong, WU Fei. A novel track measurement system based on GNSS/INS and multisensor for high-speed railway [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(5): 569-579. |
| [9] | LIN Xiuxiu, BIAN Hongwei, MA Heng, WANG Rongying. Applicability analysis of the approximate model of the Earth with the arrangement of INS in polar region [J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(3): 303-312. |
| [10] | LIU Tao, XU Aigong, SUI Xin. EEMD Interval Threshold De-noising Method for Inertial Navigation [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(7): 907-915. |
| [11] | YANG Yuanxi, LI Xiaoyan. Micro-PNT and Comprehensive PNT [J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1249-1254. |
| [12] | . Research on the Correlative Extremum Matching Algorithm Using Underwater Gravity Anomalies [J]. Acta Geodaetica et Cartographica Sinica, 2011, 40(4): 0-441. |
| [13] | WANG Zhi-Gang 1,Shaofeng Bian2. Local Gravity Field Model Based Underwater Gravity Aided Inertial Navigation [J]. Acta Geodaetica et Cartographica Sinica, 2009, 38(5): 0-414. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||