

Acta Geodaetica et Cartographica Sinica ›› 2026, Vol. 55 ›› Issue (5): 761-775.doi: 10.11947/j.AGCS.2026.20250355
• BDS/GNSS and Multi-Sensor Fusion for PNT • Next Articles
Chuang SHI1,2,3,4( ), Xinxin CHEN1,2,3, Jiale WANG1,2,3,4,5(), Ming XIA1,2,3,4
), Xinxin CHEN1,2,3, Jiale WANG1,2,3,4,5(), Ming XIA1,2,3,4
Received:2025-09-04
Revised:2026-04-30
Online:2026-06-23
Published:2026-06-23
Contact:
Jiale WANG
E-mail:shichuang@buaa.edu.cn;wang_jiale@buaa.edu.cn
About author:SHI Chuang (1968—), male, PhD, professor, academician of the Chinese Academy of Science, majors in high-precision BeiDou navigation positioning and timing, and navigation-communication integration. E-mail: shichuang@buaa.edu.cn
Supported by:CLC Number:
Chuang SHI, Xinxin CHEN, Jiale WANG, Ming XIA. Multi-source GNSS data and deep learning-driven RTK positioning error prediction for smartphones[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 761-775.
Tab. 1
Selected multi-source satellite characteristic parameters"
| 数据源/类名 | 参数/接口名称 | 描述 | 单位 |
|---|---|---|---|
| GnssClock类 | BiasUncertaintyNanos | 描述FullBiasNanos(手机内部时钟与GPST的总偏差)和BiasNanos(GNSS芯片时钟与GPST的亚纳秒级偏差)的不确定度 | ns |
| GnssMeasurement类 | ReceivedSvTimeUncertaintyNanos | 接收到的卫星的发射时刻不确定度 | ns |
| AccumulatedDeltaRangeUncertaintyMeters | 载波相位不确定度 | m | |
| Cn0DbHz | 载噪比 | dB-Hz | |
| 惯导传感器[ | 姿态偏航角 | 描述设备运动方向与正北方向的夹角 | ° |
| 惯导传感器 | 平面运动速度 | 设备在北方向与东方向的运动速度 | m/s |
| 后处理 | 伪距残差 | 观测伪距与根据定位结果计算的理论伪距之间的差值,反映观测值的拟合程度 | m |
| 后处理 | PDOP | 描述卫星几何构型对定位精度的影响程度 | — |
| 后处理 | 历元间位置差分 | 相邻两个历元之间计算出的三维位置变化量 | m |
Fig. 1
CNN-LSTM neural network incorporating dual attention mechanisms for channel and spatial domains"
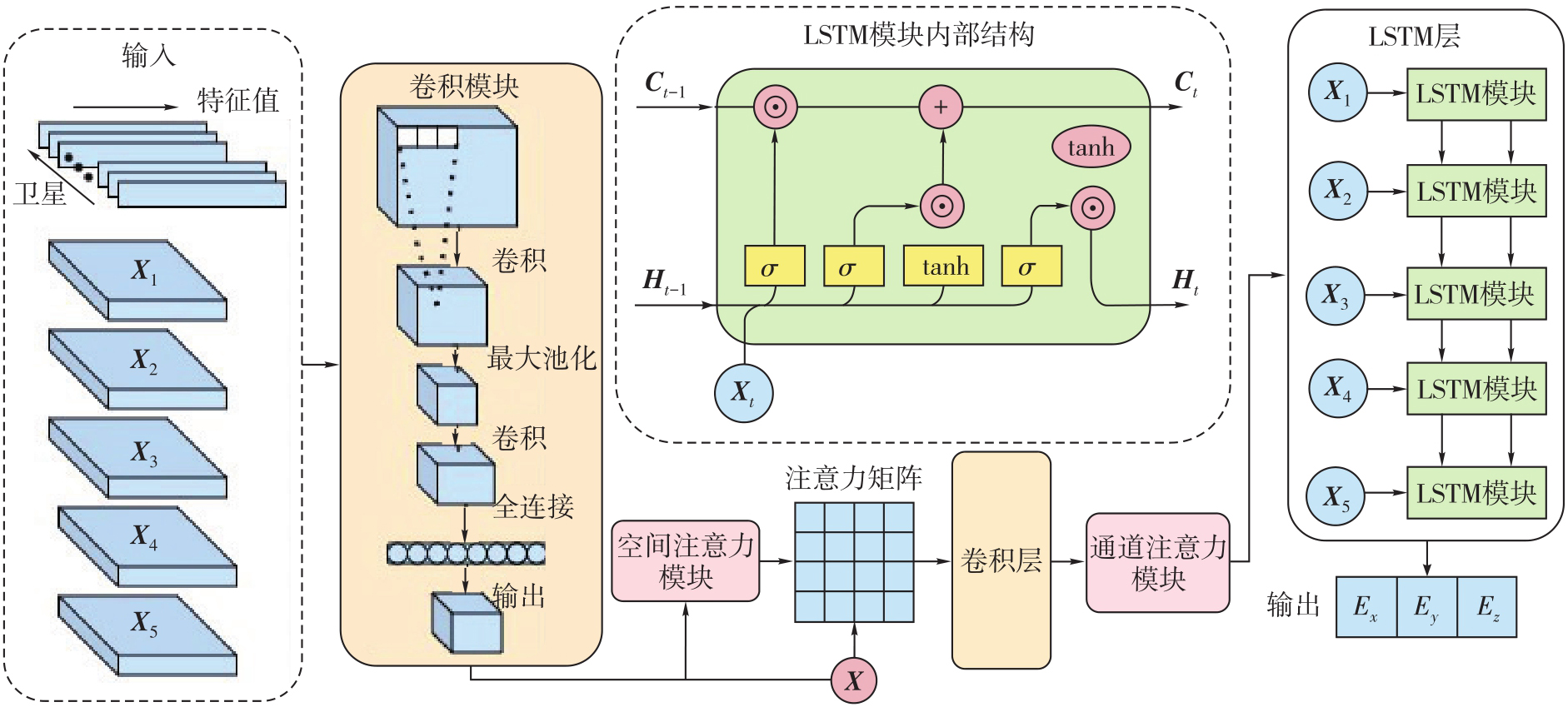
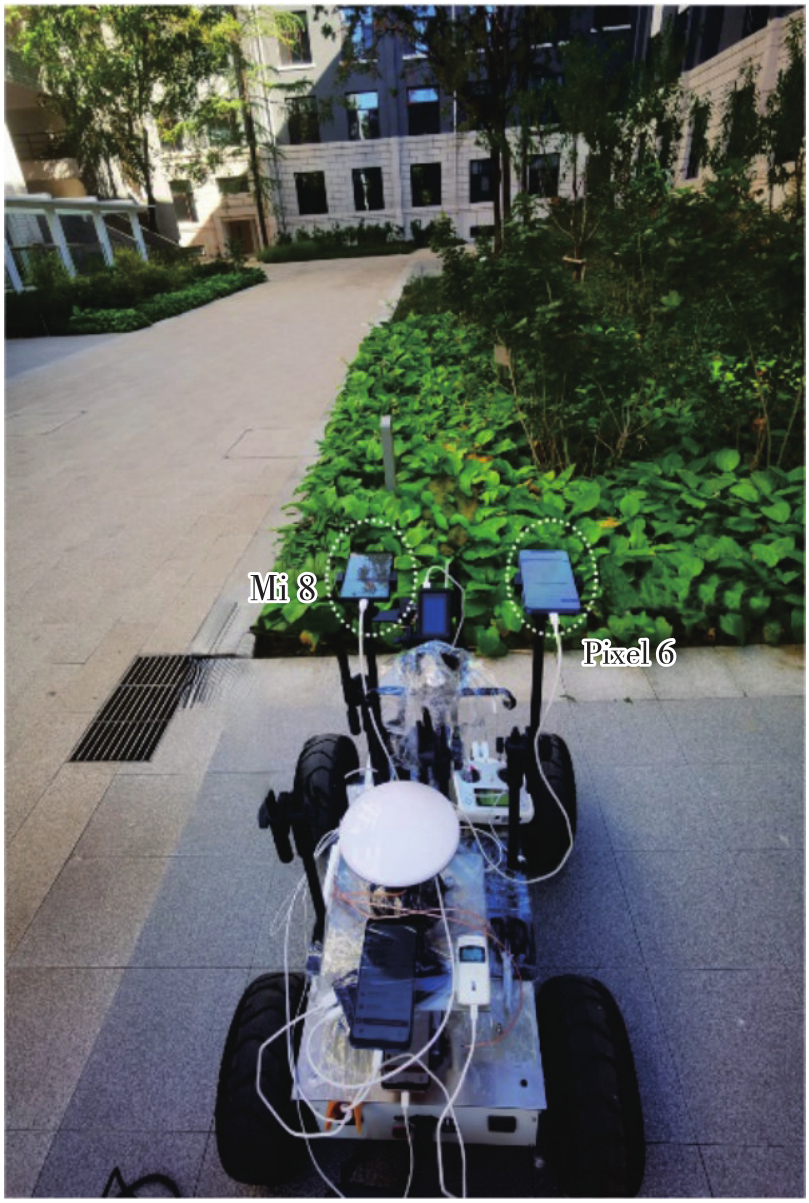
Fig. 2
Data collection equipment"
Tab. 2
Chipset types of phones and their supported GNSS raw measurement information"
| 设备名称 | 天线 | 系统 | GNSS芯片 | 星座 | 频率 | 载波相位 |
|---|---|---|---|---|---|---|
| Mi 8 | 线极化 | 安卓12 | 博通BCM4775 | G/R/C/E/J | L1,L5 | 支持 |
| Pixel 6 | 线极化 | 安卓13 | 博通BCM4776 | G/R/C/E/J | L1,L5 | 支持 |

Fig. 3
Dynamic data collection route"
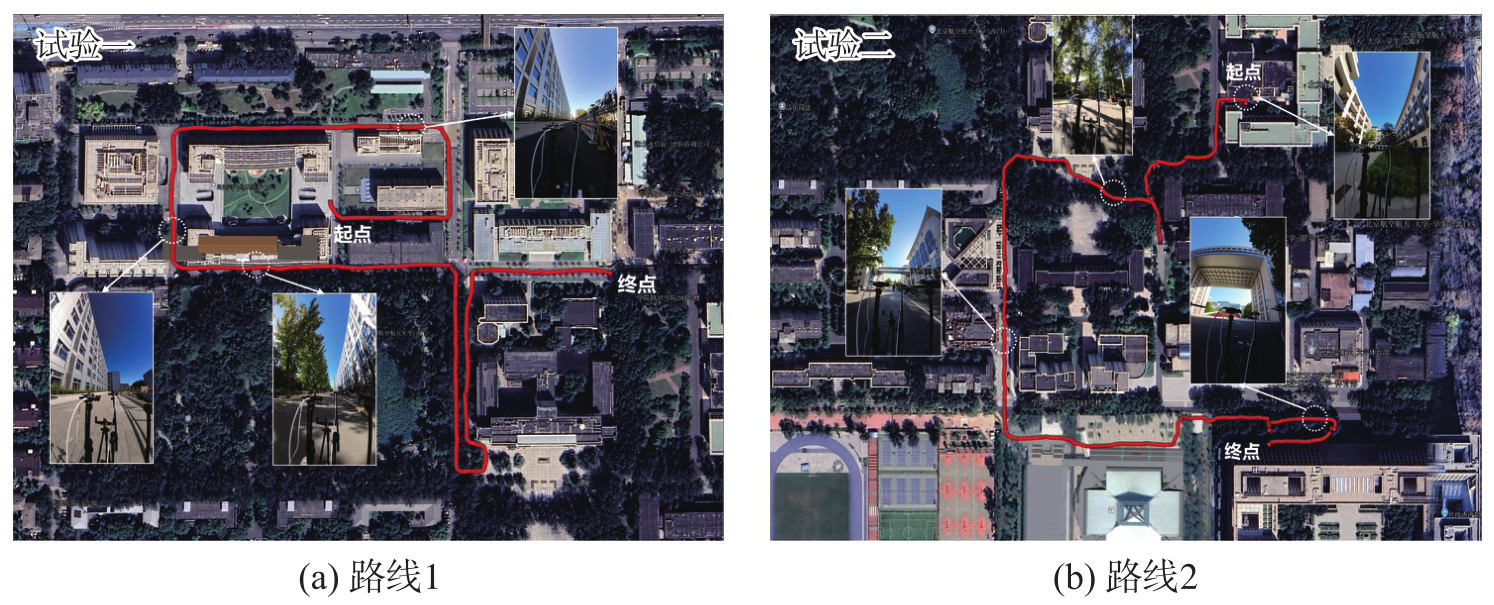
Fig. 4
The number of visible satellites and the position dilution of precision change over time"
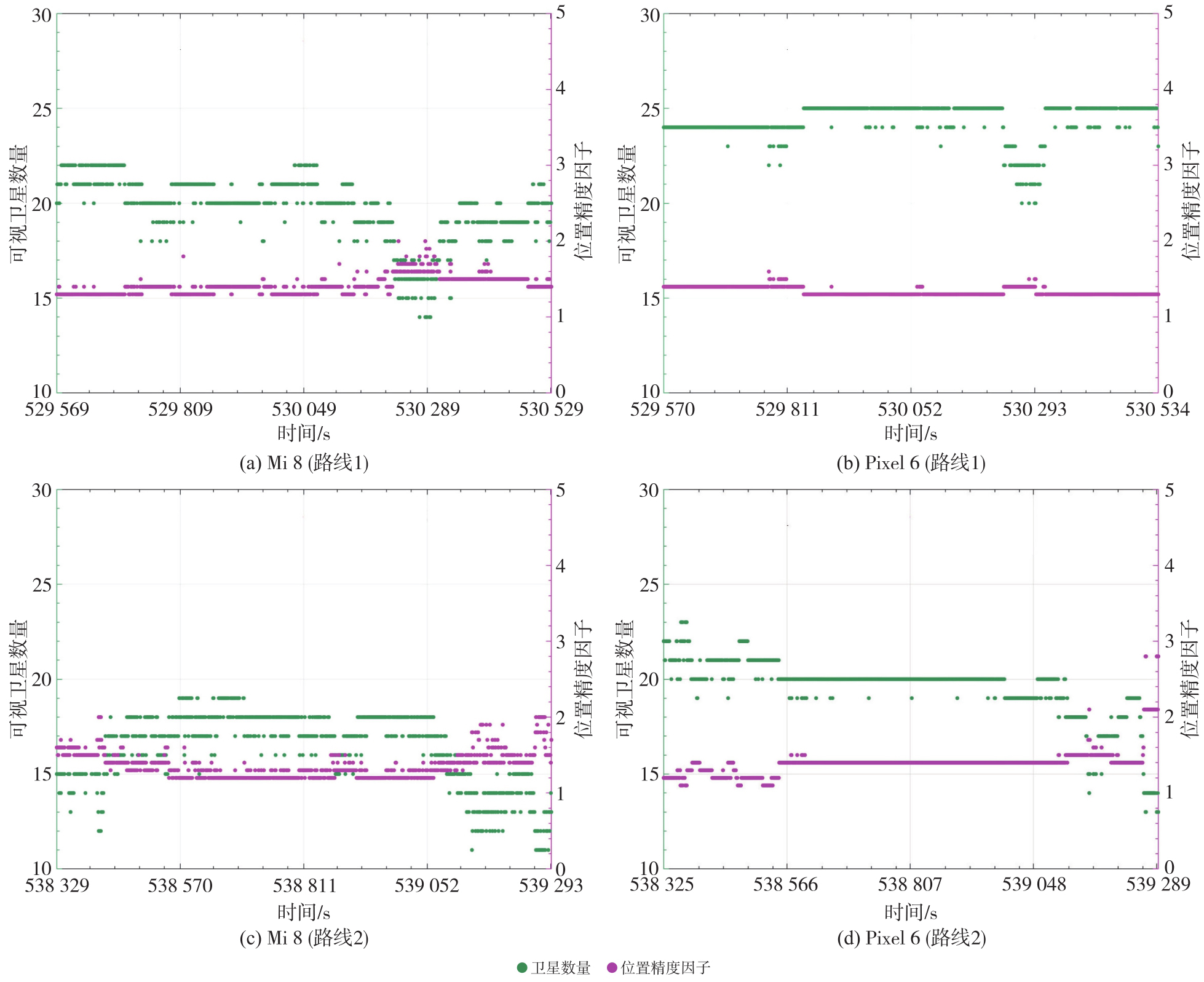
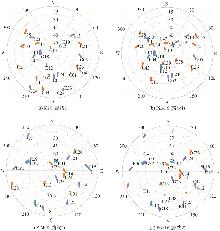
Fig. 5
Satellite zenith map of two phones in the dataset"
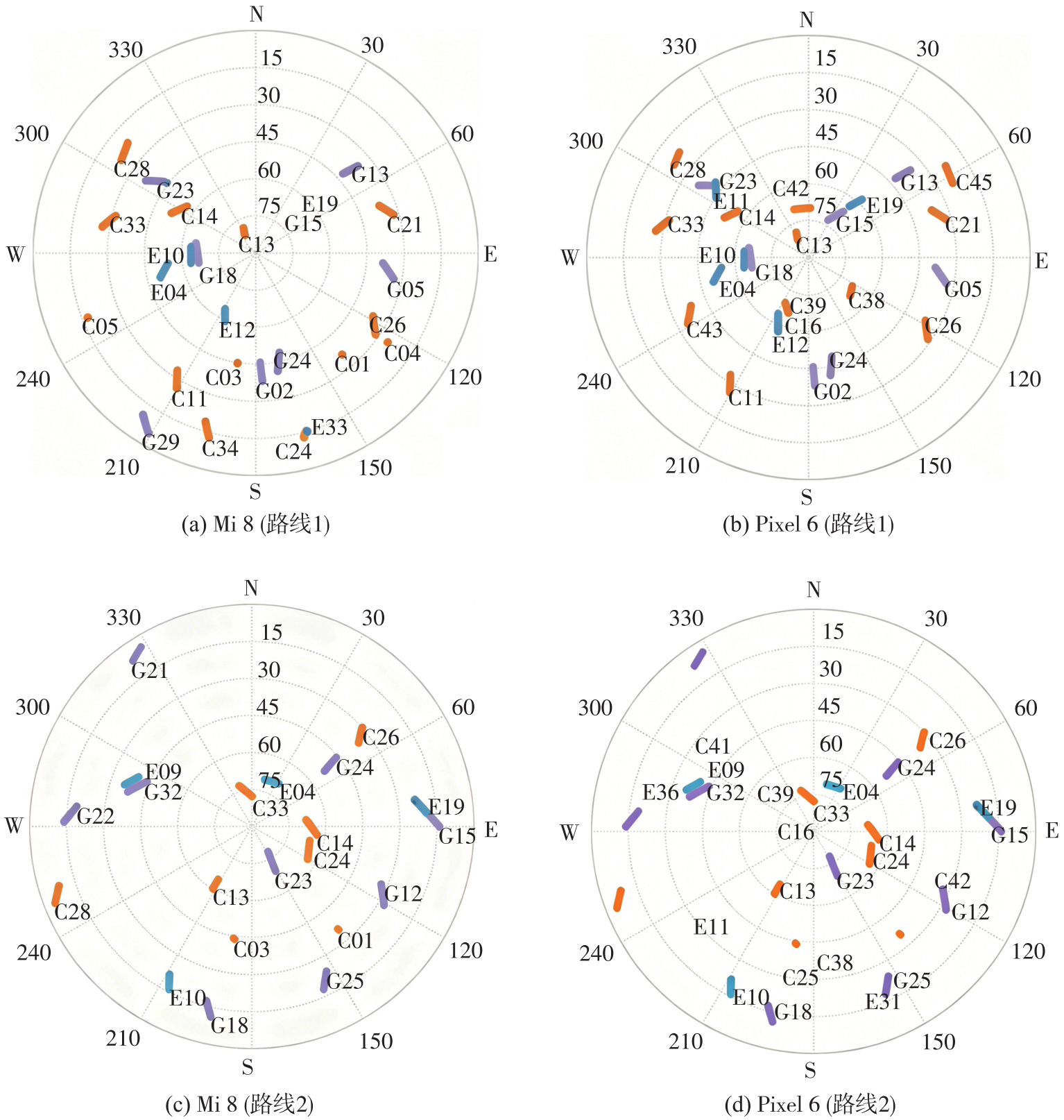
Fig. 6
The SNR of different satellites changes over time"
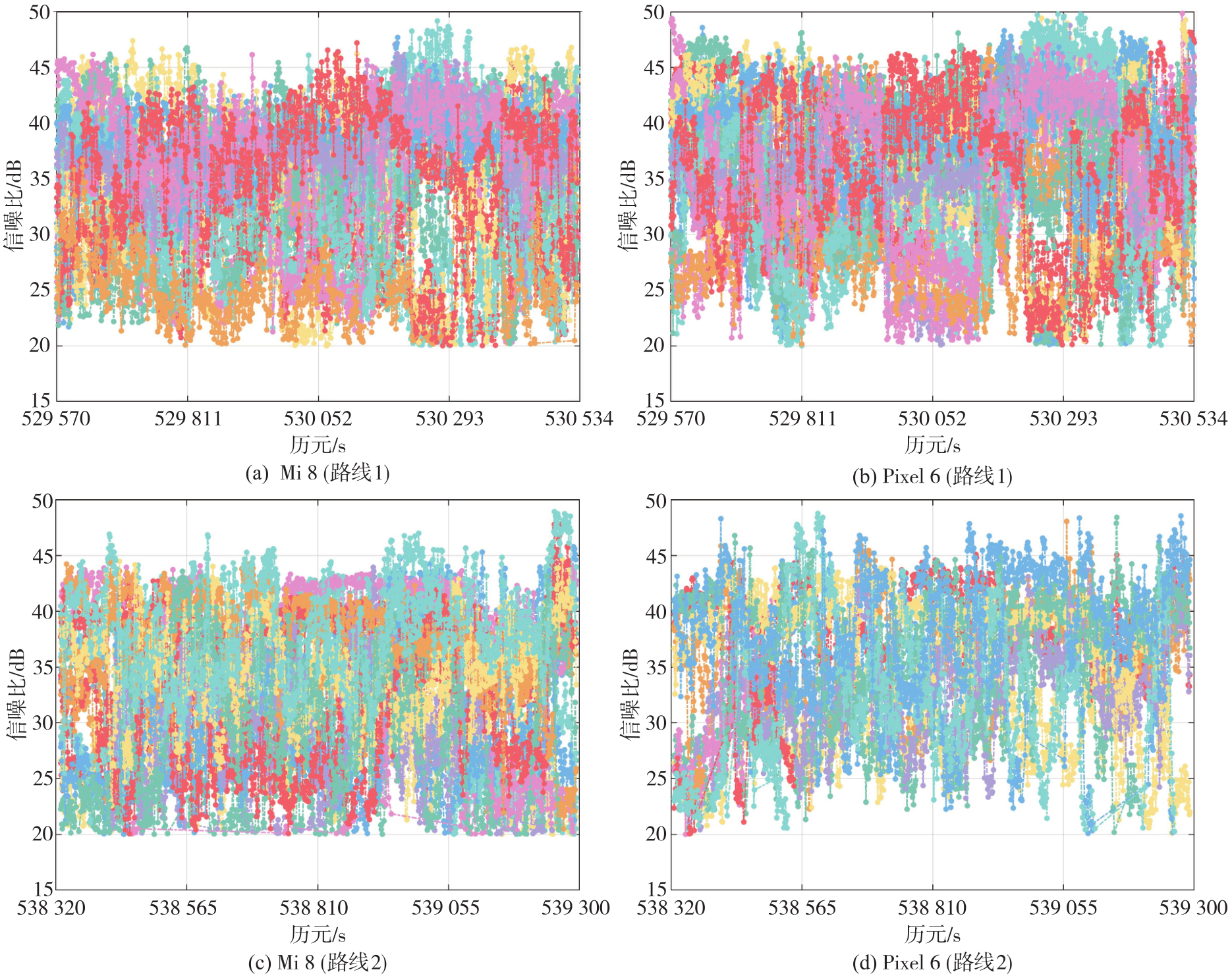

Fig. 7
Positioning accuracy and trajectory of Mi 8 on route 1 in the test set"
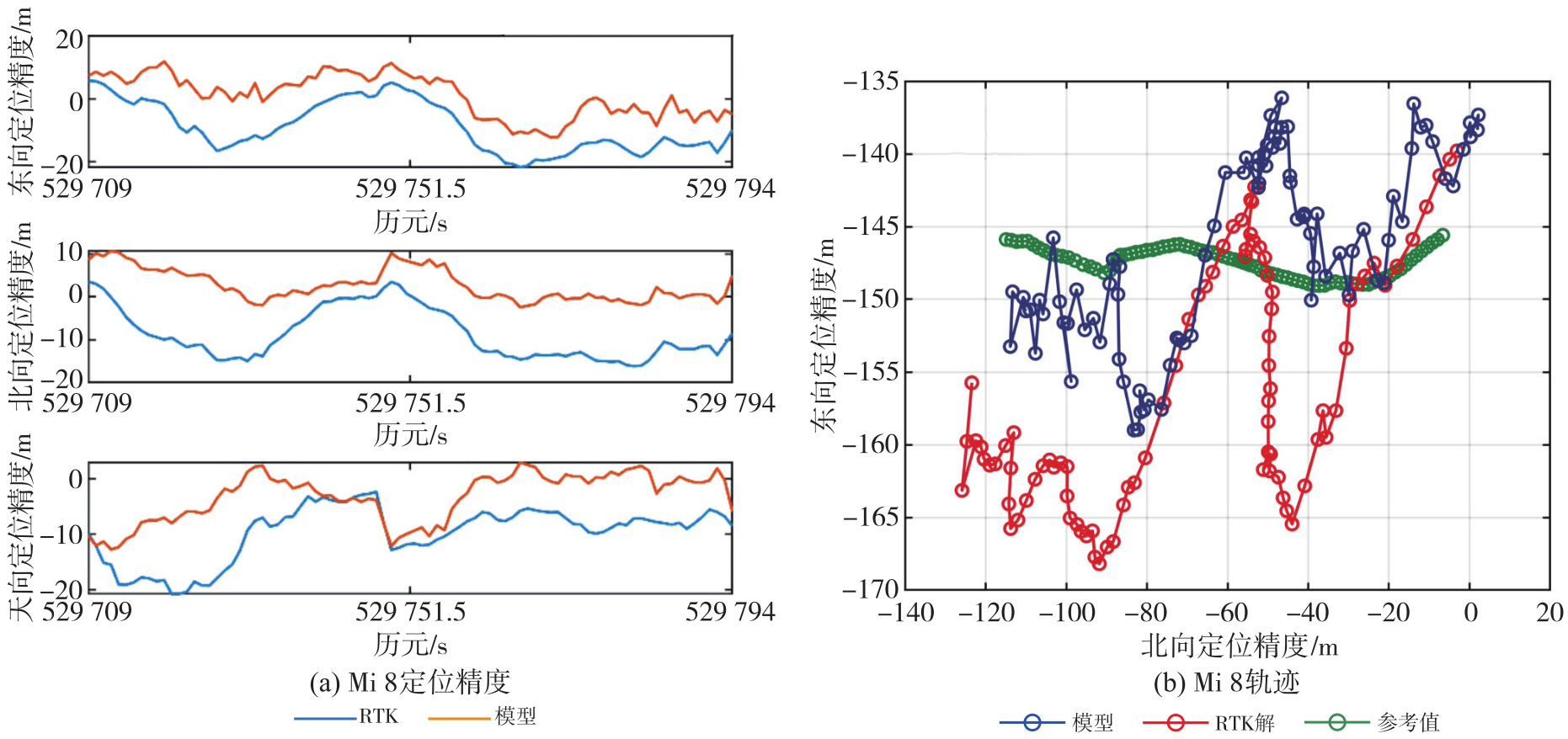

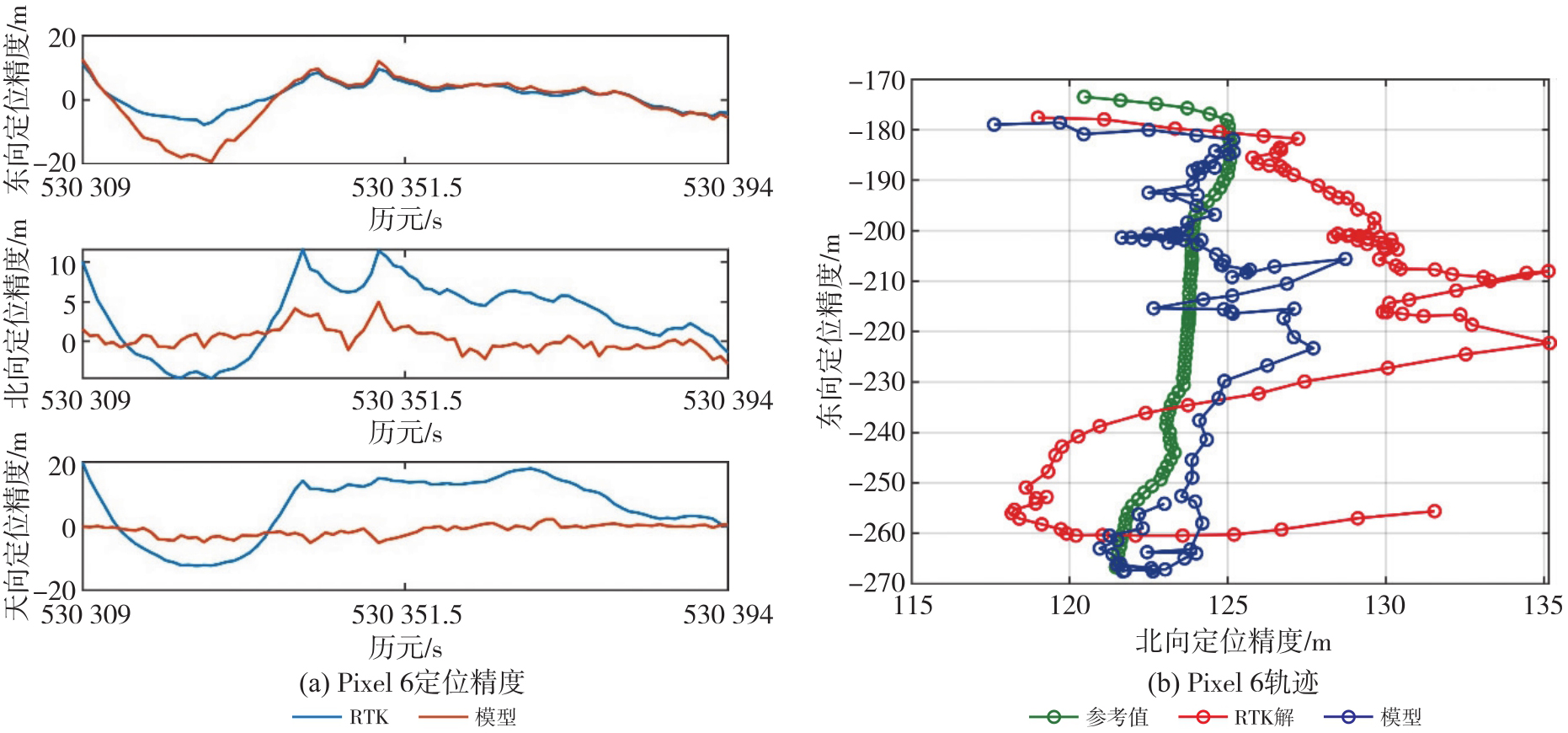
Fig. 8
Positioning accuracy and trajectory of Pixel 6 on route 1 in the test set"
Tab. 3
Localization accuracy of the experimental equipment on the route 1 test set"
| 设备 | 指标 | 模型误差 | RTK误差 | ||||
|---|---|---|---|---|---|---|---|
| 北向 | 东向 | 天向 | 北向 | 东向 | 天向 | ||
| Mi 8 | RMS | 4.560 4 | 6.742 3 | 5.438 2 | 10.490 0 | 11.906 2 | 11.012 5 |
| AVE | 2.742 5 | 1.065 1 | -3.270 4 | -8.680 5 | -8.823 9 | -9.829 4 | |
| STD | 3.665 0 | 6.696 7 | 4.370 4 | 5.924 1 | 8.040 4 | 4.994 7 | |
| MAX | 10.700 5 | 12.200 4 | 12.760 0 | 16.160 6 | 21.701 1 | 20.776 4 | |
| Pixel 6 | RMS | 1.460 1 | 7.807 1 | 2.162 7 | 5.423 1 | 4.487 8 | 11.139 5 |
| AVE | 0.275 6 | -0.436 4 | -1.288 3 | 3.317 2 | 1.163 3 | 5.839 5 | |
| STD | 1.442 3 | 7.840 6 | 1.747 3 | 4.315 5 | 4.359 9 | 9.541 9 | |
| MAX | 4.960 7 | 19.192 4 | 5.187 4 | 11.559 0 | 11.098 5 | 19.844 0 | |

Fig. 9
3D positioning error distribution of two phones on route 1 in the test set"
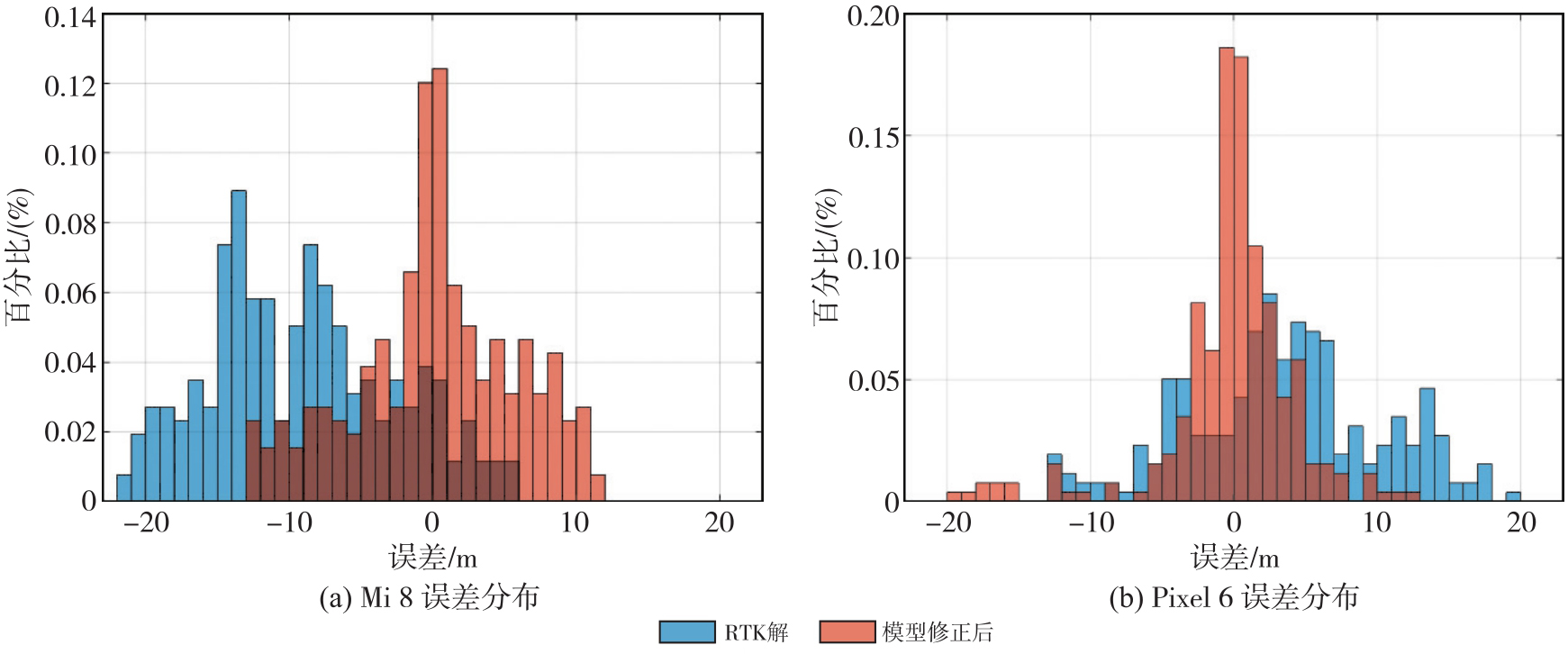

Fig. 10
Positioning accuracy and trajectory of Mi 8 on route 2 in the test set"


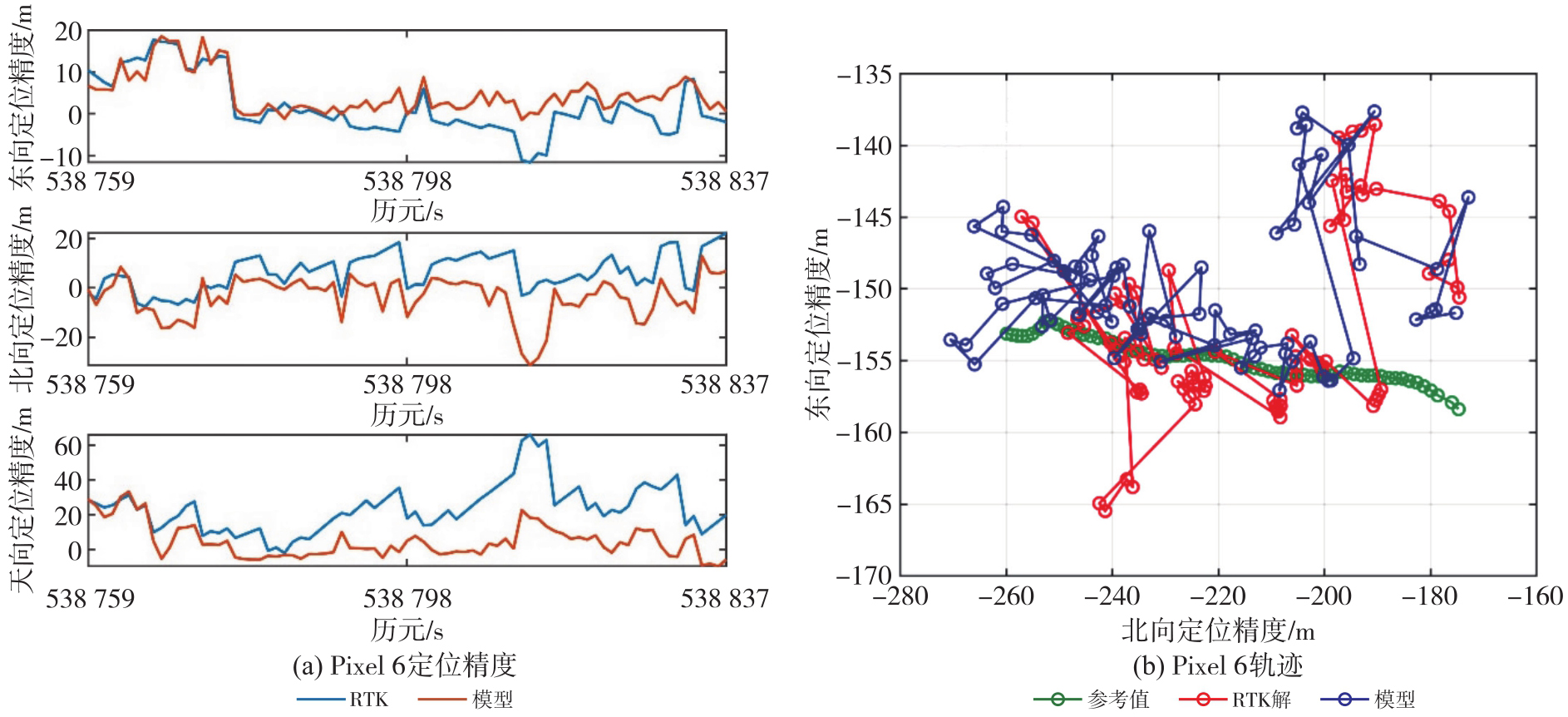
Fig. 11
Positioning accuracy and trajectory of Pixel 6 on route 2 in the test set"
Tab. 4
Results of localization accuracy of the experimental equipment on route 2 test set"
| 设备 | 指标 | 模型误差 | RTK误差 | ||||
|---|---|---|---|---|---|---|---|
| 北向 | 东向 | 天向 | 北向 | 东向 | 天向 | ||
| Mi 8 | RMS | 5.912 5 | 3.404 0 | 7.050 7 | 10.531 8 | 4.433 0 | 24.622 4 |
| AVE | -2.034 9 | -2.229 1 | 2.426 6 | 1.014 2 | -3.367 4 | 21.002 2 | |
| STD | 5.589 2 | 2.590 2 | 6.665 1 | 10.554 4 | 2.902 7 | 12.939 6 | |
| MAX | 24.639 9 | 11.563 4 | 29.383 3 | 23.696 6 | 13.401 8 | 46.614 2 | |
| Pixel 6 | RMS | 9.164 4 | 6.814 8 | 10.749 7 | 9.812 3 | 7.094 4 | 27.085 3 |
| AVE | -3.633 2 | 4.771 9 | 4.538 0 | 6.469 1 | 1.766 3 | 23.347 4 | |
| STD | 8.467 2 | 4.896 3 | 9.807 1 | 7.424 9 | 6.914 9 | 13.817 6 | |
| MAX | 29.094 4 | 18.462 4 | 33.214 6 | 22.139 8 | 17.663 8 | 66.107 3 | |

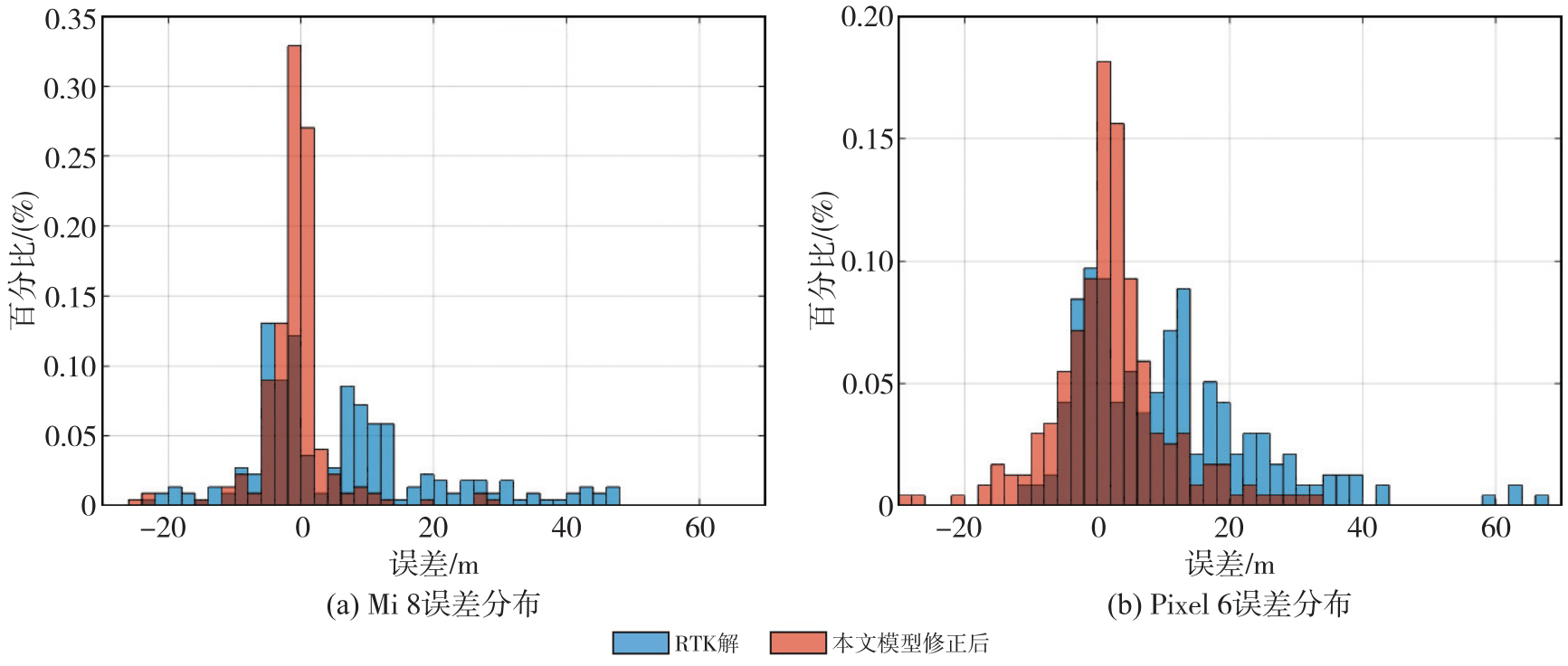
Fig. 12
3D positioning error distribution of two phones on route 2 in the test set"
| [1] | 毕京学, 甄杰, 郭英. Android手机GPS和A-GPS定位精度分析[J]. 测绘通报, 2016(7): 10-13. |
| BI Jingxue, ZHEN Jie, GUO Ying. Android phone GPS and A-GPS positioning accuracy analysis[J]. Bulletin of Surveying and Mapping, 2016(7): 10-13. | |
| [2] | 王颖喆, 陶贤露, 朱锋, 等. 利用智能手机实现GNSS原始观测值的高精度差分定位[J]. 武汉大学学报(信息科学版), 2021, 46(12): 1941-1950. |
| WANG Yingzhe, TAO Xianlu, ZHU Feng, et al. High-precision differential positioning with GNSS raw observations from smartphones[J]. Geomatics and Information Science of Wuhan University, 2021, 46(12): 1941-1950. | |
| [3] | 袁良雄, 王浩, 申志恒. 基于扩展天线的智能手机GNSS RTK定位性能研究[J]. 全球定位系统, 2023, 48(3): 77-84. |
| YUAN Liangxiong, WANG Hao, SHEN Zhiheng. Research on the GNSS RTK positioning performance of smartphones based on extended antenna[J]. Global Positioning System, 2023, 48(3): 77-84. | |
| [4] | 潘宇明, 丁乐乐, 王震. 安卓手机GNSS信号增强对定位精度的影响分析[J]. 测绘通报, 2022(S2): 43-47. |
| PAN Yuming, DING Lele, WANG Zhen. Analysis of the influence of GNSS signal enhancement on positioning accuracy of Android phones[J]. Bulletin of Surveying and Mapping, 2022(S2): 43-47. | |
| [5] |
高成发, 陈波, 刘永胜. Android智能手机GNSS高精度实时动态定位[J]. 测绘学报, 2021, 50(1): 18-26. DOI: .
doi: 10.11947/j.AGCS.2020.20200107 |
|
GAO Chengfa, CHEN Bo, LIU Yongsheng. Android smartphone GNSS high-precision real-time kinematic positioning[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(1): 18-26. DOI: .
doi: 10.11947/j.AGCS.2020.20200107 |
|
| [6] | TAO X, LIU W, WANG Y, et al. Smartphone RTK positioning with multi-frequency and multi-constellation raw observations: GPS L1/L5, Galileo E1/E5a, BDS B1I/B1C/B2a[J]. Journal of Geodesy, 2023, 97(5): 43. |
| [7] | 李仕辉, 王虎, 马宏阳, 等. 城市环境手机GNSS定位随机模型自适应构建方法[J]. 测绘科学, 2024, 49(3): 8-18. |
| LI Shihui, WANG Hu, MA Hongyang, et al. An adaptive stochastic model construction method for smartphone GNSS positioning in urban environments[J]. Science of Surveying and Mapping, 2024, 49(3): 8-18. | |
| [8] | DENG J, WANG H, WEI S, et al. A stochastic model based on optimal satellite subset selection strategy for smartphone pseudorange relative positioning[J]. Sensors, 2024, 24(8): 2598. |
| [9] | WANG J L, XIA M, ZHANG D, et al. Urban GNSS positioning for consumer electronics: 3D mapping and advanced signal processing[J]. IEEE Transactions on Consumer Electronics, 2025, 71(2): 7059-7072. |
| [10] | 王式太, 张博宇, 殷敏. 基于动态阈值的移动终端GNSS定位阴影匹配算法[J]. 大地测量与地球动力学, 2021, 41(11): 1101-1105. |
| WANG Shitai, ZHANG Boyu, YIN Min. A shadow matching algorithm for GNSS positioning of mobile terminals based on dynamic threshold[J]. Journal of Geodesy and Geodynamics, 2021, 41(11): 1101-1105. | |
| [11] | KIM D, JANG M, LEE K, et al. Application of shadow matching technique to improve smartphone-based global navigation satellite system positioning accuracy[J]. Sensors and Materials, 2022, 34: 383. |
| [12] | GROVES P D. Shadow matching: a new GNSS positioning technique for urban canyons[J]. Journal of Navigation, 2011, 64(3): 417-430. |
| [13] | 冯家昊, 任晓东, 张小红, 等. 一种智能手机GNSS精密定位随机模型构建方法及定位性能分析[J]. 导航定位与授时, 2024, 11(5): 136-144. |
| FENG Jiahao, REN Xiaodong, ZHANG Xiaohong, et al. A method for constructing a stochastic model for smartphone GNSS precise positioning and its performance analysis[J]. Navigation, Positioning and Timing, 2024, 11(5): 136-144. | |
| [14] | HUANG X, LI W, DAI Z, et al. Improving smartphone GNSS positioning in challenging urban environments using GA-BPNN[J]. GPS Solutions, 2024, 29(1): 3. |
| [15] | LIU W, SHI X, ZHU F, et al. Quality analysis of multi-GNSS raw observations and a velocity-aided positioning approach based on smartphones[J]. Advances in Space Research, 2019, 63(8): 2358-2377. |
| [16] | 冷宏宇, 秘金钟, 徐彦田, 等. 智能手机终端RTK定位性能分析[J]. 测绘科学, 2020, 45(12): 15-21. |
| LENG Hongyu, MI Jinzhong, XU Yantian, et al. Performance analysis of smartphone RTK positioning[J]. Science of Surveying and Mapping, 2020, 45(12): 15-21. | |
| [17] | WANG Jiale, ZHEN Fu, HU Yong, et al. Instantaneous sub-meter level precise point positioning of low-cost smartphones[J]. NAVIGATION: Journal of the Institute of Navigation, 2023, 70(4): 597. |
| [18] | ZHANG X, TAO X, ZHU F, et al. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach[J]. GPS Solutions, 2018, 22(3): 70. |
| [19] | HÅKANSSON M. Characterization of GNSS observations from a Nexus 9 Android tablet[J]. GPS Solutions, 2018, 23(1): 21. |
| [20] | 王家乐, 郑福, 施闯, 等. 智能手机GNSS数据质量分析及大气增强PPP精度评估[C]//第十三届中国卫星导航年会论文集. 北京: 中国卫星导航系统管理办公室, 2022: 1-9. |
| WANG Jiale, ZHENG Fu, SHI Chuang, et al. Analysis of smartphone GNSS data quality and accuracy assessment of atmospheric-augmented PPP[C]//Proceedings of the 13th China Satellite Navigation Conference. Beijing: China Satellite Navigation Office, 2022: 1-9. | |
| [21] | VAZQUEZ-ONTIVEROS J R, MARTINEZ-FELIX C A, MELGAREJO-MORALES A, et al. Assessing the quality of raw GNSS observations and 3D positioning performance using the Xiaomi Mi 8 dual-frequency smartphone in Northwest Mexico[J]. Earth Science Informatics, 2024, 17(1): 21-35. |
| [22] | 赵兴旺, 陶安迪, 陈健, 等. 智能手机GNSS数据质量分析与随机模型建立[J]. 大地测量与地球动力学, 2024, 44(7): 661-666. |
| ZHAO Xingwang, TAO Andi, CHEN Jian, et al. Analysis of smartphone GNSS data quality and stochastic model establishment[J]. Journal of Geodesy and Geodynamics, 2024, 44(7): 661-666. | |
| [23] | 徐彦田, 刘巍峰, 李玉星, 等. BDS/GPS/GAL智能手机RTK动态定位算法[J]. 无线电工程, 2023, 53(5): 1061-1067. |
| XU Yantian, LIU Weifeng, LI Yuxing, et al. BDS/GPS/GAL smartphone RTK dynamic positioning algorithm[J]. Radio Engineering, 2023, 53(5): 1061-1067. | |
| [24] | 姚子扬, 尚俊娜, 孙建强, 等. 一种多源融合室内外无缝定位方法[J]. 传感技术学报, 2022, 35(1): 72-83. |
| YAO Ziyang, SHANG Junna, SUN Jianqiang, et al. A multi-source fusion seamless indoor and outdoor positioning method[J]. Journal of Transducer Technology, 2022, 35(1): 72-83. | |
| [25] | WANG J L, XIA M, XIE Y, et al. Multimodal sensor fusion-based lightweight pedestrian wearable system for continuous health monitoring and location tracking[J]. IEEE Sensors Journal, 2025, 26(10): 14558-14575. |
| [26] | PAZIEWSKI J, FORTUNATO M, MAZZONI A, et al. An analysis of multi-GNSS observations tracked by recent Android smartphones and smartphone-only relative positioning results[J]. Measurement. 2021, 175: 109162. |
| [27] | LI Xingxing, ZHANG Xiaohong, NIU Xiaoji, et al. Progress and achievements of multi-sensor fusion navigation in China during 2019—2023[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 102-114. |
| [28] | JADERBERG M, SIMONYAN K, ZISSERMAN A. Spatial transformer networks[J]. Advances in Neural Information Processing Systems, 2015, 28. |
| [29] | ZHU X, CHENG D, ZHANG Z, et al. An empirical study of spatial attention mechanisms in deep networks[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 6688-6697. |
| [30] | WANG Jiale, SHI Chuang, ZHENG Fu, et al. Multi-frequency smartphone positioning performance evaluation: insights into A-GNSS PPP-B2b services and beyond[J]. Satellite Navigation, 2024, 5(1): 25. |
| [31] | YAN D, LI T, JIANG H, et al. PS-VINS: a visual-inertial SLAM system with pedestrian gait and structural constraints using smartphone sensors[J]. IEEE Sensors Journal, 2024, 24(5): 6777-6791. |
| [32] | WANG Jiale, SHI Chuang, XIA Ming, et al. Seamless indoor-outdoor foot-mounted inertial pedestrian positioning system enhanced by smartphone PPP/3-D Map/Barometer[J]. IEEE Internet of Things Journal, 2024, 11(7): 13051-13069. |
| [33] | LI Guangcai, GENG Jianghui. Characteristics of raw multi-GNSS measurement error from Google Android smart devices[J]. GPS solutions, 2019, 23(3): 90. |
| [1] | Bofeng LI, Zhetao ZHANG. Real-time processing of unmodeled errors: detection, compensation, and control [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 776-786. |
| [2] | Jianghui GENG, Feng WANG. Componentized PNT framework for blind-plug-and-play multi-sensor fusion and its principles and experimental verification [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 787-797. |
| [3] | Feng ZHU, Yuanmu LIAO, Rui ZHOU, Xiaohong ZHANG. Continuous-time state estimation methods for multi-sensor fusion navigation [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 798-808. |
| [4] | Linghan YAO, Tianhe XU, Yangzi CONG, Zhen ZHANG, Jianping XING. Tightly coupled LiDAR/UWB/INS multi-sensor fusion model based on IESRKF [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 809-825. |
| [5] | Tengfei FENG. GRACE and multi-source data processing and signal analysis for water storage changes and non-tectonic deformation in North China [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 943-943. |
| [6] | Xianpao LI. Study on the method and application of joint inversion of GNSS and GRACE/GFO data for terrestrial water storage changes [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 944-944. |
| [7] | Ju HONG. Research on GNSS precise point positioning augmentation technology [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 945-945. |
| [8] | Jie ZHOU. The comparative study on spatial suitability of earthquake emergency shelters in new and old urban districts based on multi-sourced heterogeneous data [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 949-949. |
| [9] | Chengcheng ZHU, Zhen LI, Jinyun GUO, Maosheng ZHOU, Wanqiu LI. Improved latitude difference method for calculating crossover point position from wide-swath measurement data [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 673-683. |
| [10] | Xiaolei YANG, Yun XIAO, Liqing YANG, Xiaodong HONG, Enze GUO, Han WANG. Improved baseline method for time-variable gravity field recovery [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 708-720. |
| [11] | Yang LI, Haijun HUANG, Sulan LIU, Xiaohui WU, Qi LIU, Qipei PANG, Yunlong WU. Century-scale projection of terrestrial water storage anomaly and drought risk in the Poyang Lake Basin using a CMIP6-driven Transformer-GRU model [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 721-738. |
| [12] | Xiansheng YANG. Research on high-available visible light intelligent positioning technology [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 753-753. |
| [13] | Jijun GENG. Research on pedestrian indoor and outdoor positioning based on smartphone multi-sensor fusion [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 754-754. |
| [14] | Hongyang MA. Tropospheric corrections augmented PPP-AR: theory, methods and the application in aviation navigation [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 756-756. |
| [15] | Hang LIU. Research on low-latitude ionospheric scintillation monitoring and forecasting methods using ground-based GNSS and space-borne GNSS-R observations [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 758-758. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||