

Acta Geodaetica et Cartographica Sinica ›› 2026, Vol. 55 ›› Issue (5): 809-825.doi: 10.11947/j.AGCS.2026.20250313
• BDS/GNSS and Multi-Sensor Fusion for PNT • Previous Articles Next Articles
Linghan YAO1,2( ), Tianhe XU2(), Yangzi CONG2, Zhen ZHANG2, Jianping XING1
), Tianhe XU2(), Yangzi CONG2, Zhen ZHANG2, Jianping XING1
Received:2025-08-11
Revised:2026-05-06
Online:2026-06-23
Published:2026-06-23
Contact:
Tianhe XU
E-mail:202420423@mail.sdu.edu.cn;thxu@sdu.edu.cn
About author:YAO Linghan (1998—), male, PhD candidate, majors in multi-sensor fusion navigation and positioning. E-mail: 202420423@mail.sdu.edu.cn
Supported by:CLC Number:
Linghan YAO, Tianhe XU, Yangzi CONG, Zhen ZHANG, Jianping XING. Tightly coupled LiDAR/UWB/INS multi-sensor fusion model based on IESRKF[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 809-825.

Fig. 1
LiDAR/UWB/INS multi-source heterogeneous sensor tightly coupled model flowchart"
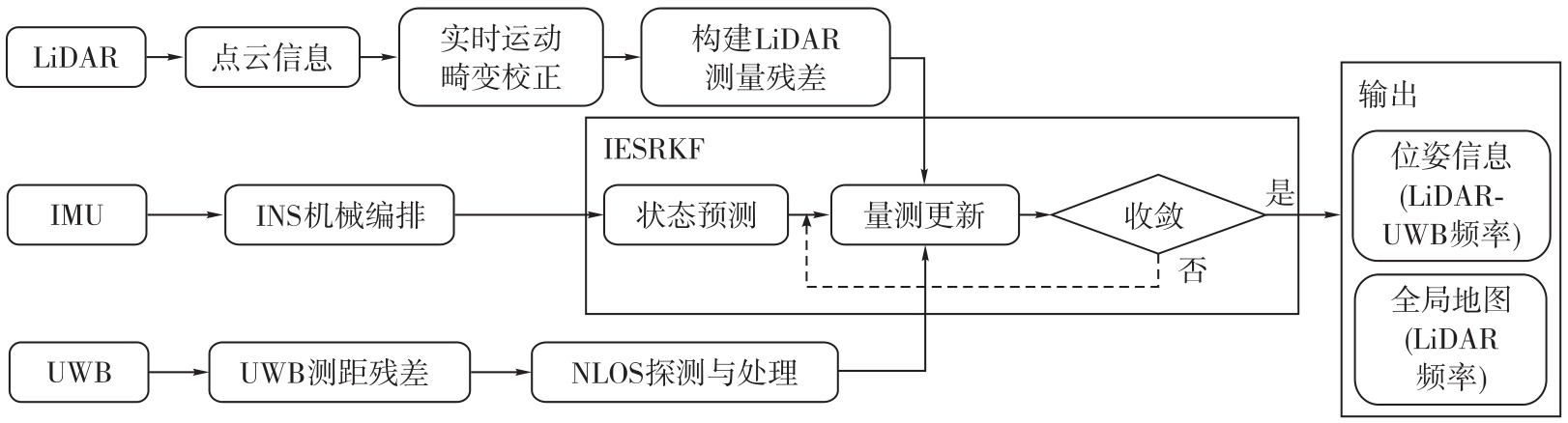
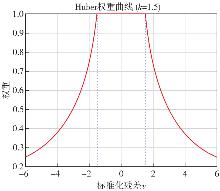
Fig. 2
Huber function weight adaptive adjustment curve"
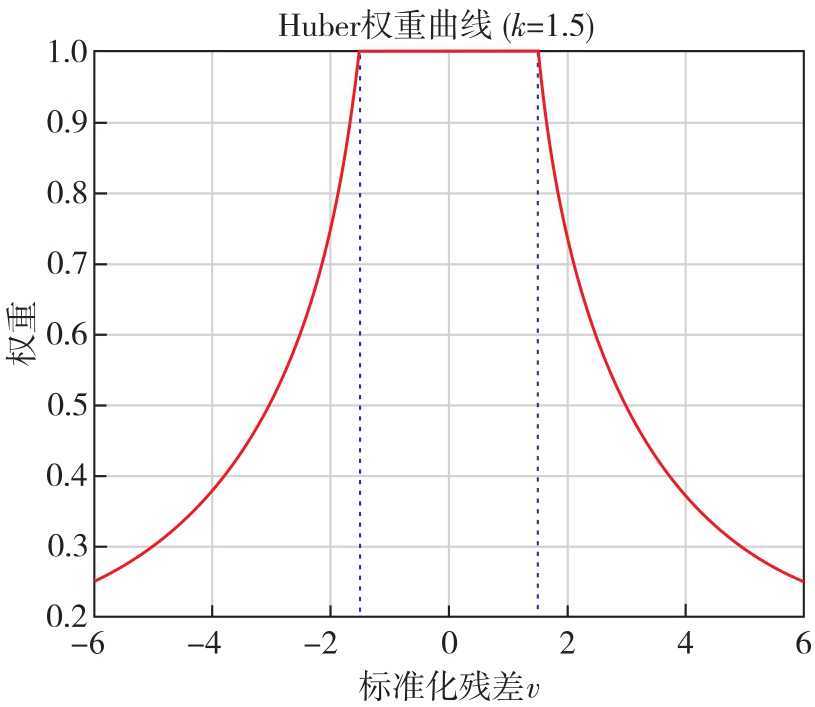

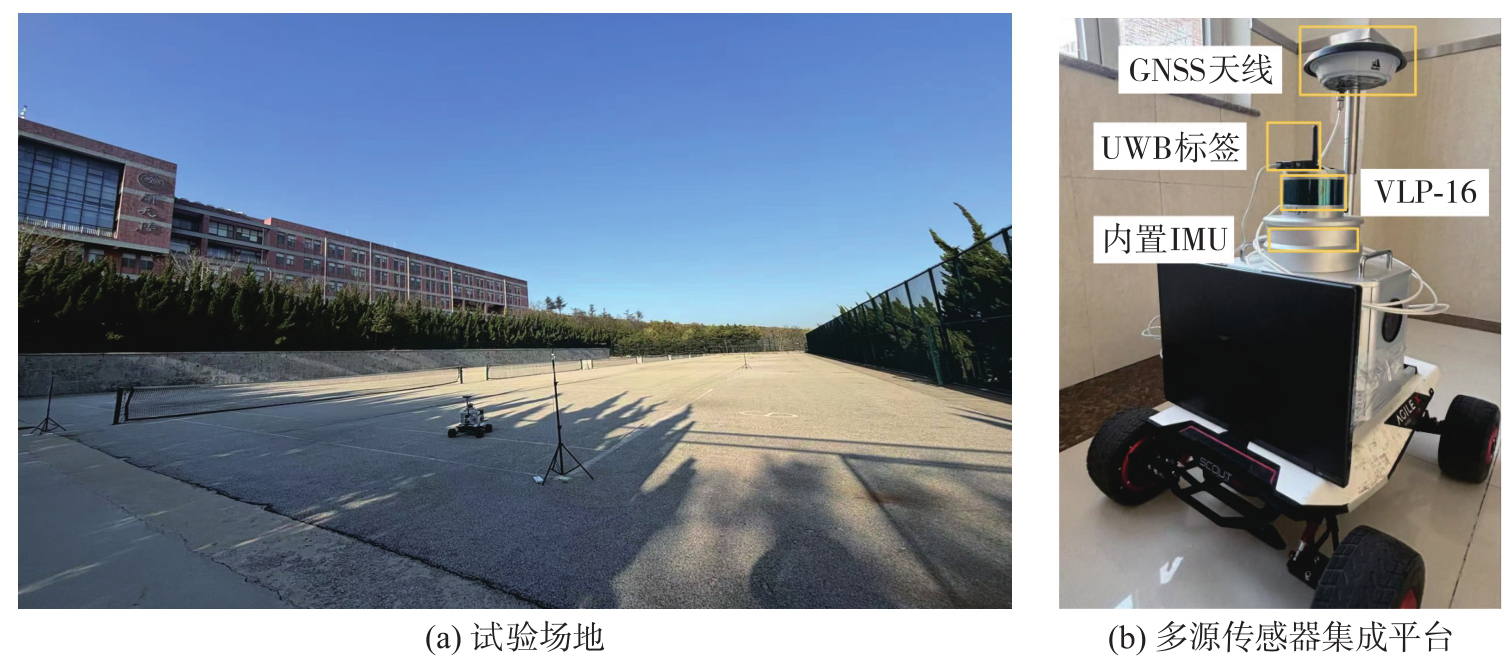
Fig. 3
Experimental site and mult-isource sensor integration platform"
Tab. 1
LiDAR sensor related parameters"
| 参数 | LiDAR |
|---|---|
| 激光线束 | 16线 |
| 激光波长 | 905 nm |
| 测量范围 | 小于100 m |
| 测量精度 | ±3 cm |
| 采样频率 | 10 Hz |
| 水平方向测角范围 | 360° |
| 水平方向角度分辨率 | 0.1°~0.4° |
| 垂直方向测角范围 | +15°~-15° |
| 垂直方向角度分辨率 | 2° |
Tab. 2
HGuide i300 IMU related parameters"
| 参数 | 陀螺仪 | 加速度计 |
|---|---|---|
| 零偏不稳定性 | 3(°)/h | 0.02 mg |
| 白噪声 |  |  |
Fig. 4
UWB VDOP and HDOP values in LOS and NLOS experiments"
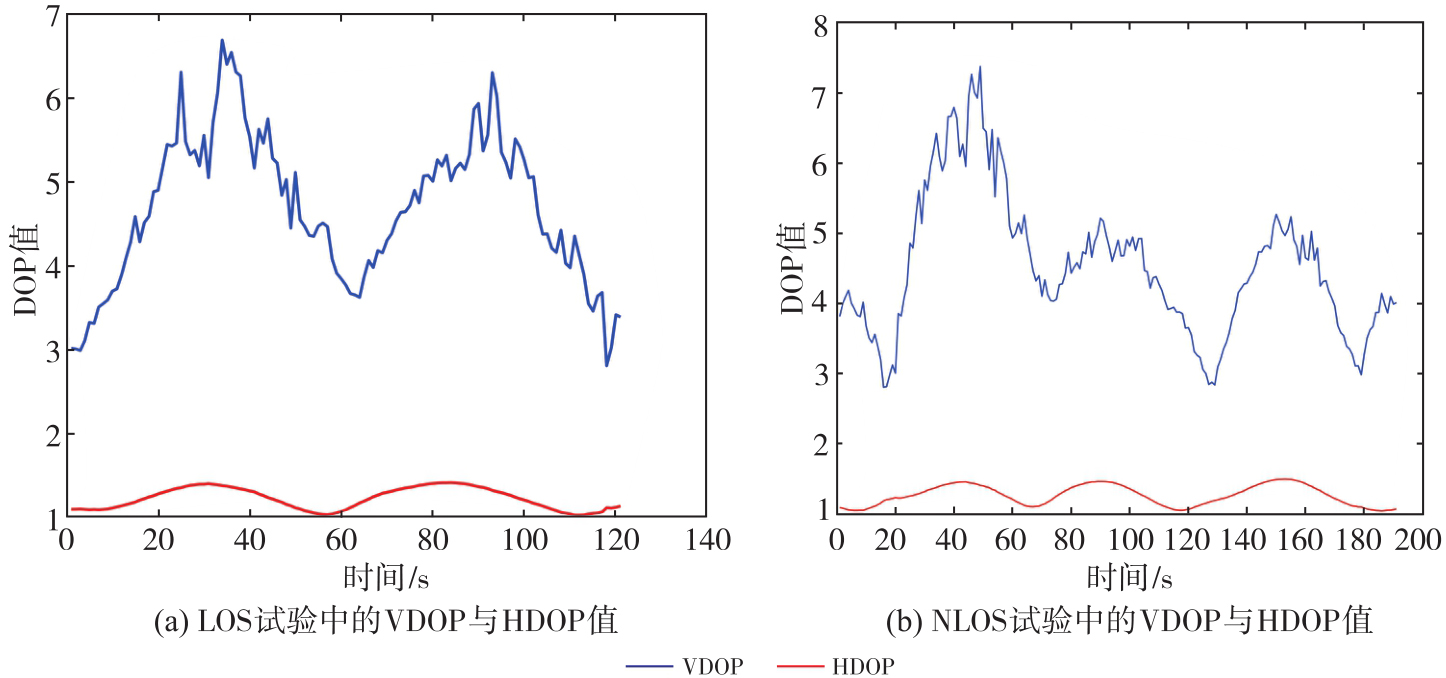
Fig. 5
Overall and local trajectory comparisons of different algorithms in the LOS environment"
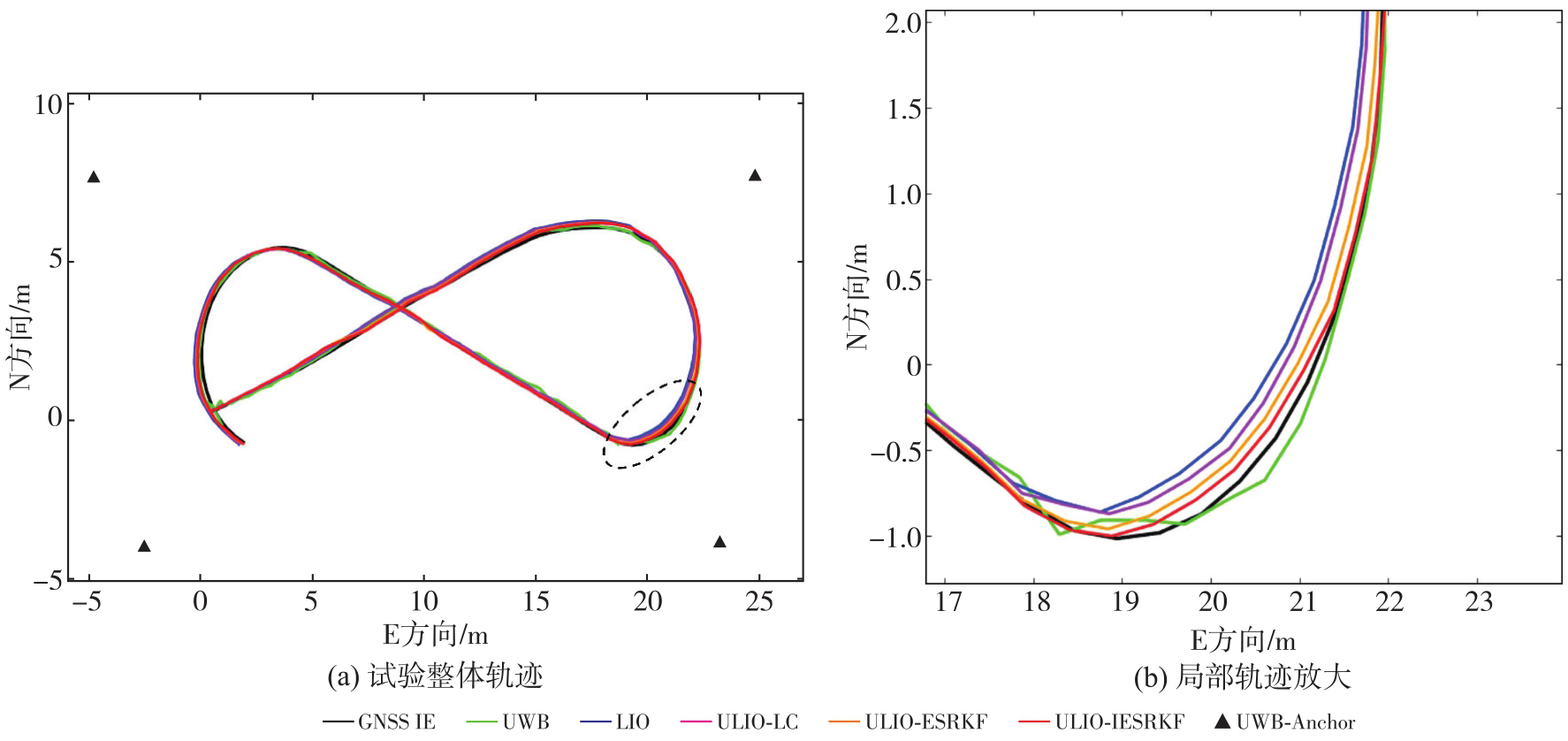

Fig. 6
Time series plots of position error for various algorithms in LOS environment and box plots of position error"
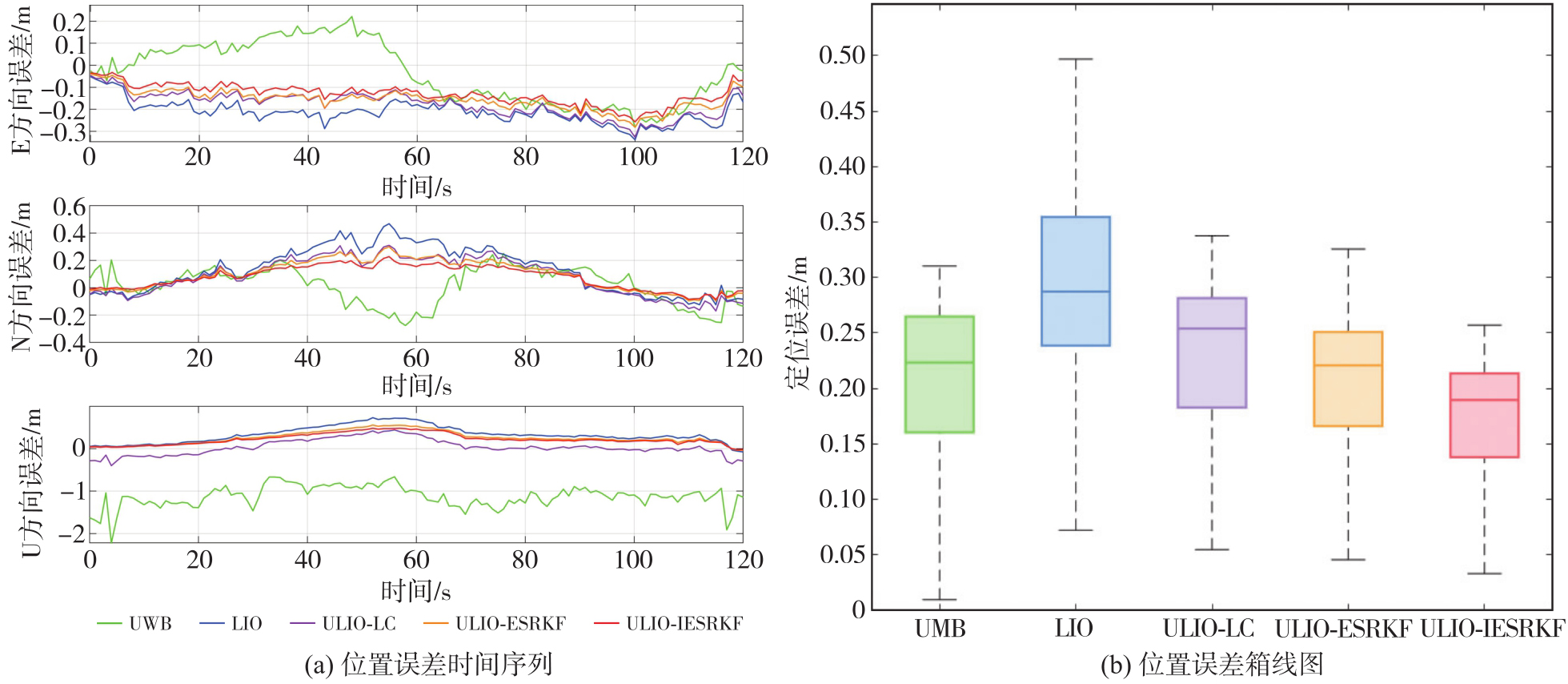
Tab. 3
Location RMSE statistics for various algorithms in LOS environment"
| 方向 | UWB | LIO | ULIO-LC | ULIO-ESRKF | ULIO-IESRKF |
|---|---|---|---|---|---|
| E | 0.143 | 0.218 | 0.186 | 0.163 | 0.140 |
| N | 0.135 | 0.208 | 0.174 | 0.142 | 0.115 |
| U | 1.160 | 0.330 | 0.487 | 0.295 | 0.259 |
| 平面 | 0.197 | 0.301 | 0.255 | 0.216 | 0.181 |

Fig. 7
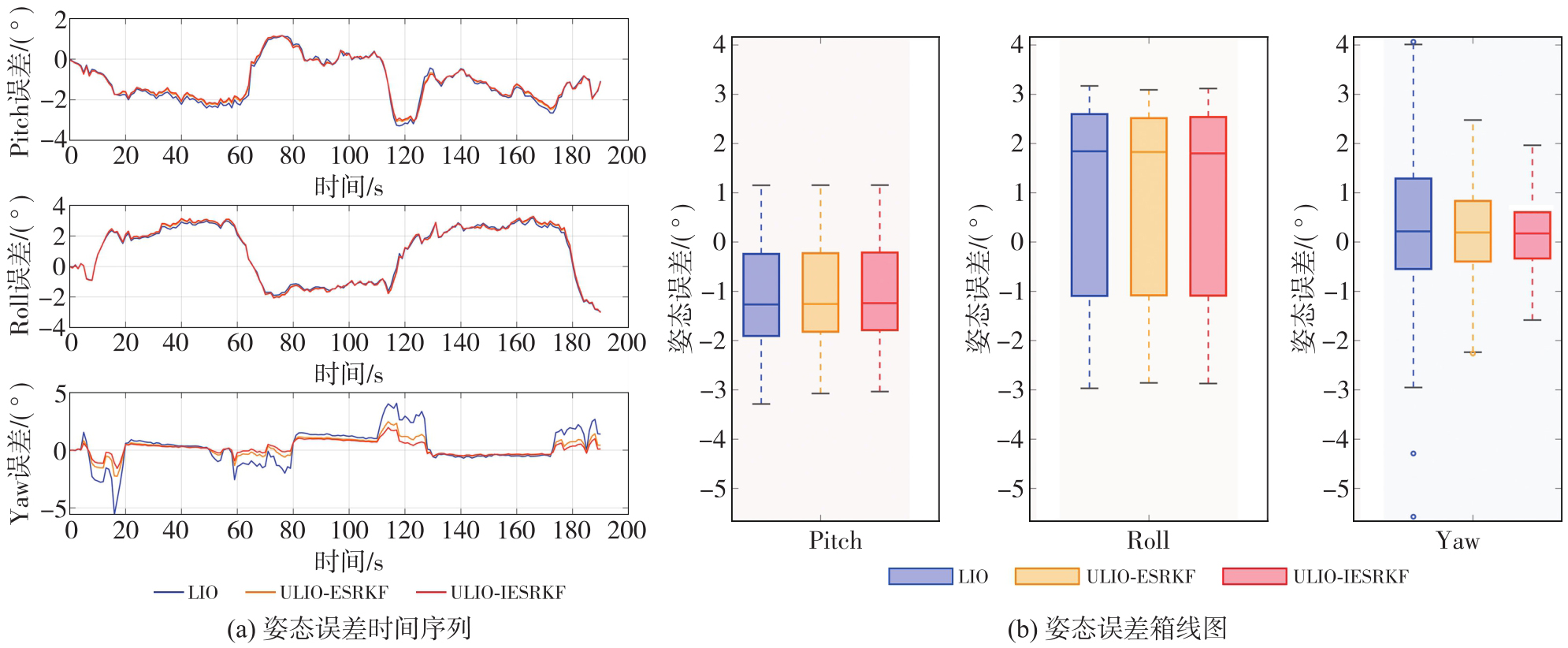
Time series plots of attitude error for various algorithms and cumulative distribution plots of attitude error in LOS environment"
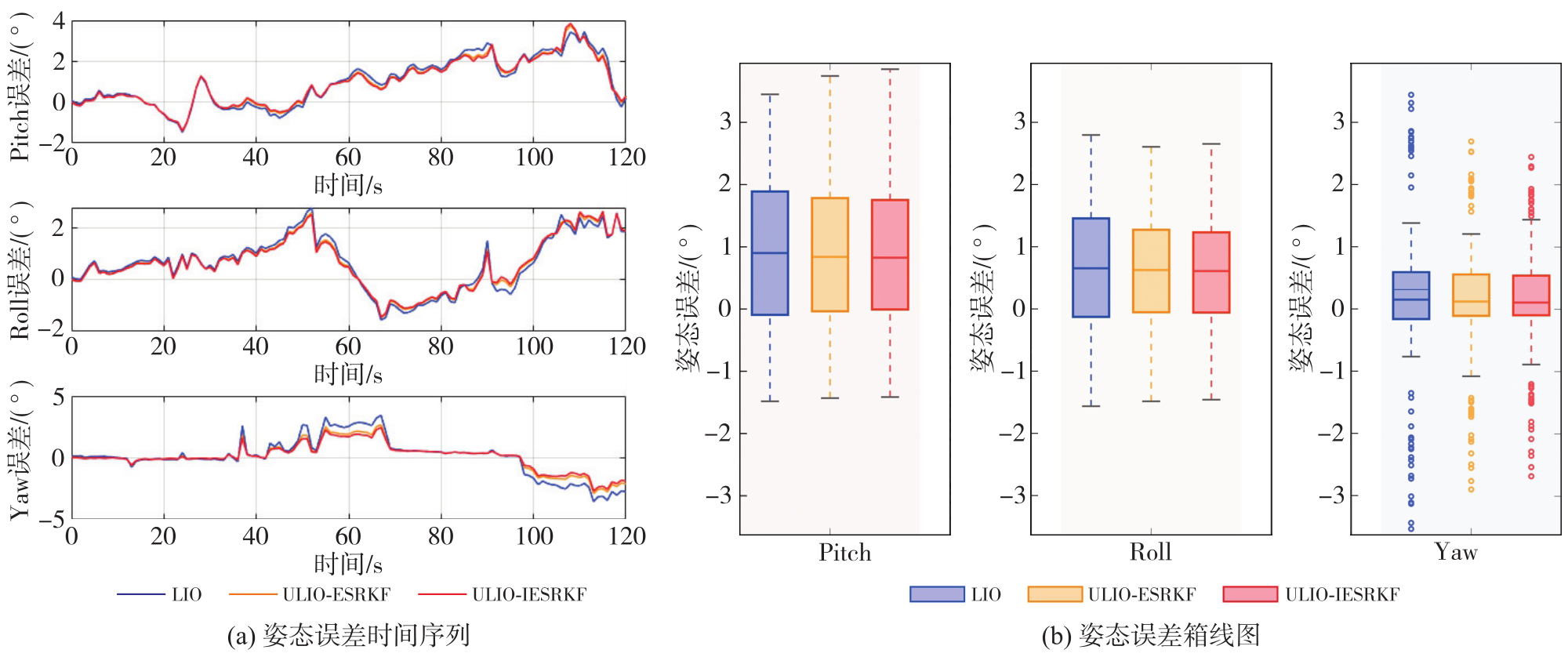
Tab. 4
Attitude RMSE statistics for various algorithms in LOS environment"
| 姿态 | LIO | ULIO-ESRKF | ULIO-IESRKF |
|---|---|---|---|
| Pitch | 1.523 | 1.467 | 1.452 |
| Roll | 1.234 | 1.194 | 1.184 |
| Yaw | 1.547 | 1.176 | 1.059 |

Fig. 8
Overall trajectory and trajectory of localized rotated regions for various algorithms in the NLOS environment"
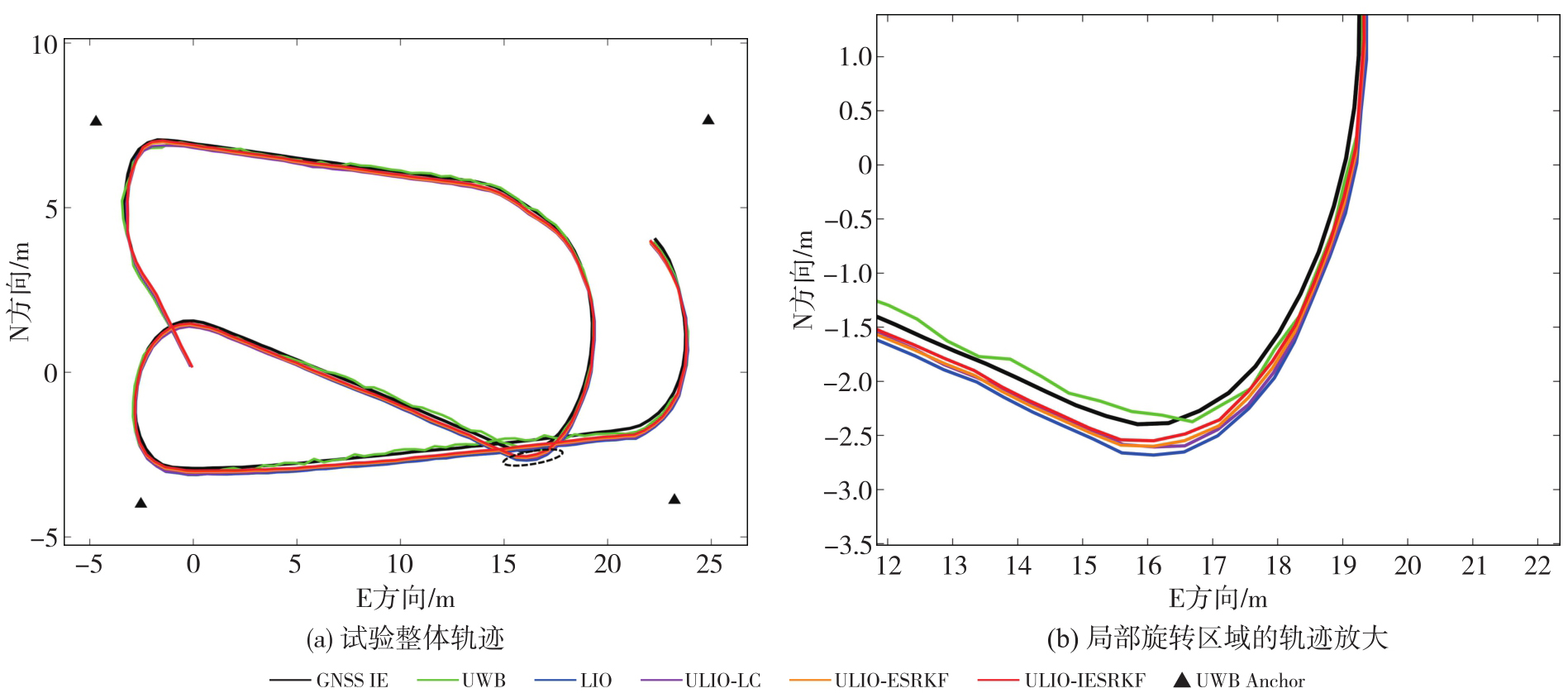

Fig. 9
Time series plots of position error for various algorithms in NLOS environment and box plots of position error"
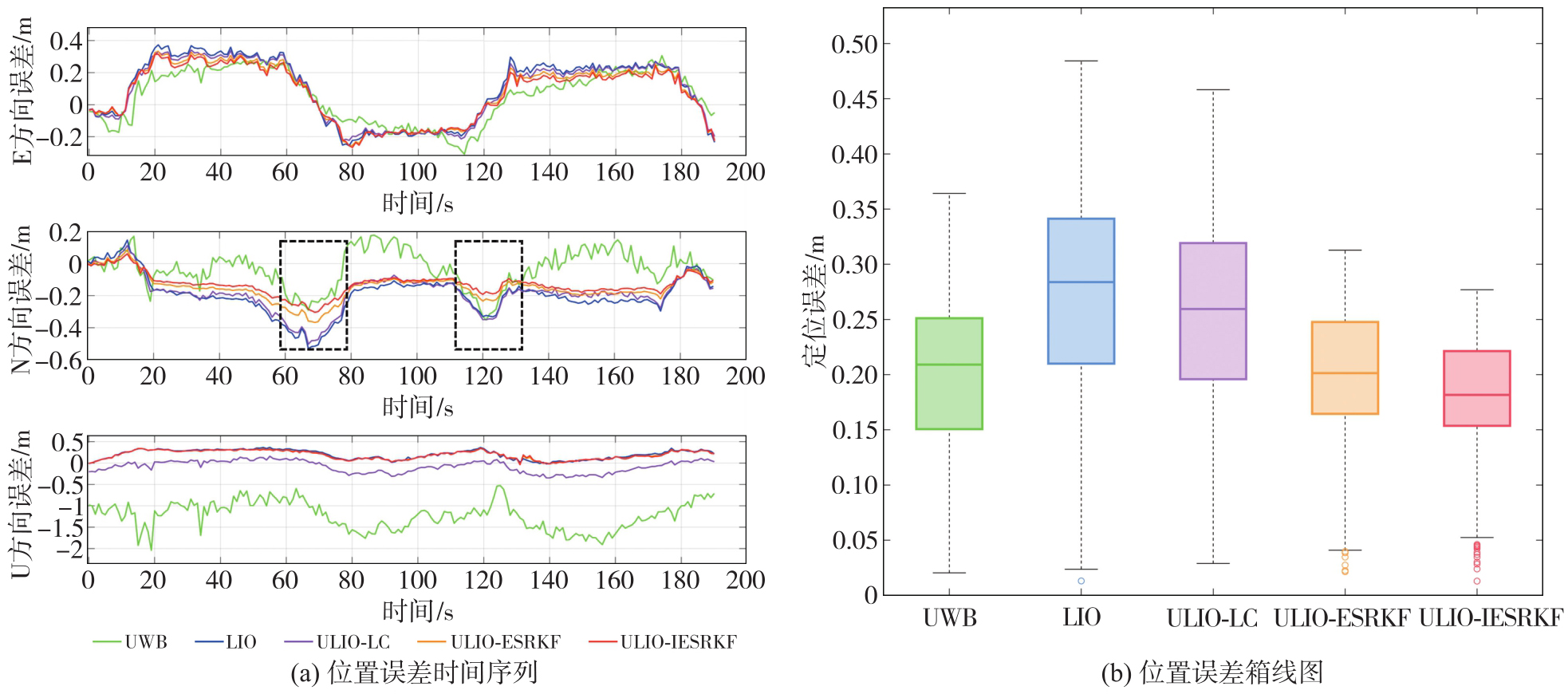
Tab. 5
Location RMSE statistics for various algorithms in NLOS environment"
| 方向 | UWB | LIO | ULIO-LC | ULIO-ESRKF | ULIO-IESRKF |
|---|---|---|---|---|---|
| E | 0.173 | 0.223 | 0.201 | 0.180 | 0.158 |
| N | 0.152 | 0.231 | 0.214 | 0.146 | 0.133 |
| U | 1.274 | 0.270 | 0.292 | 0.221 | 0.188 |
| 平面 | 0.230 | 0.321 | 0.294 | 0.232 | 0.199 |
Tab. 6
Maximum positioning errors for various algorithms in NLOS environments"
| 方向 | UWB | LIO | ULIO-LC | ULIO-ESRKF | ULIO-IESRKF |
|---|---|---|---|---|---|
| E | 0.310 | 0.374 | 0.342 | 0.333 | 0.316 |
| N | 0.352 | 0.531 | 0.503 | 0.367 | 0.304 |
| U | 2.012 | 0.368 | 0.347 | 0.349 | 0.343 |

Fig. 10
Time series plots of attitude error for various algorithms and cumulative distribution plots of attitude error in NLOS environment"
Tab. 7
Attitude RMSE for various algorithms in NLOS environment"
| 姿态 | LIO | ULIO-ESRKF | ULIO-IESRKF |
|---|---|---|---|
| Pitch | 1.547 | 1.477 | 1.390 |
| Roll | 2.059 | 1.989 | 1.921 |
| Yaw | 1.618 | 1.233 | 1.055 |

Fig. 11
Trajectory and position error time series for various ULIO algorithms in NLOS environments"
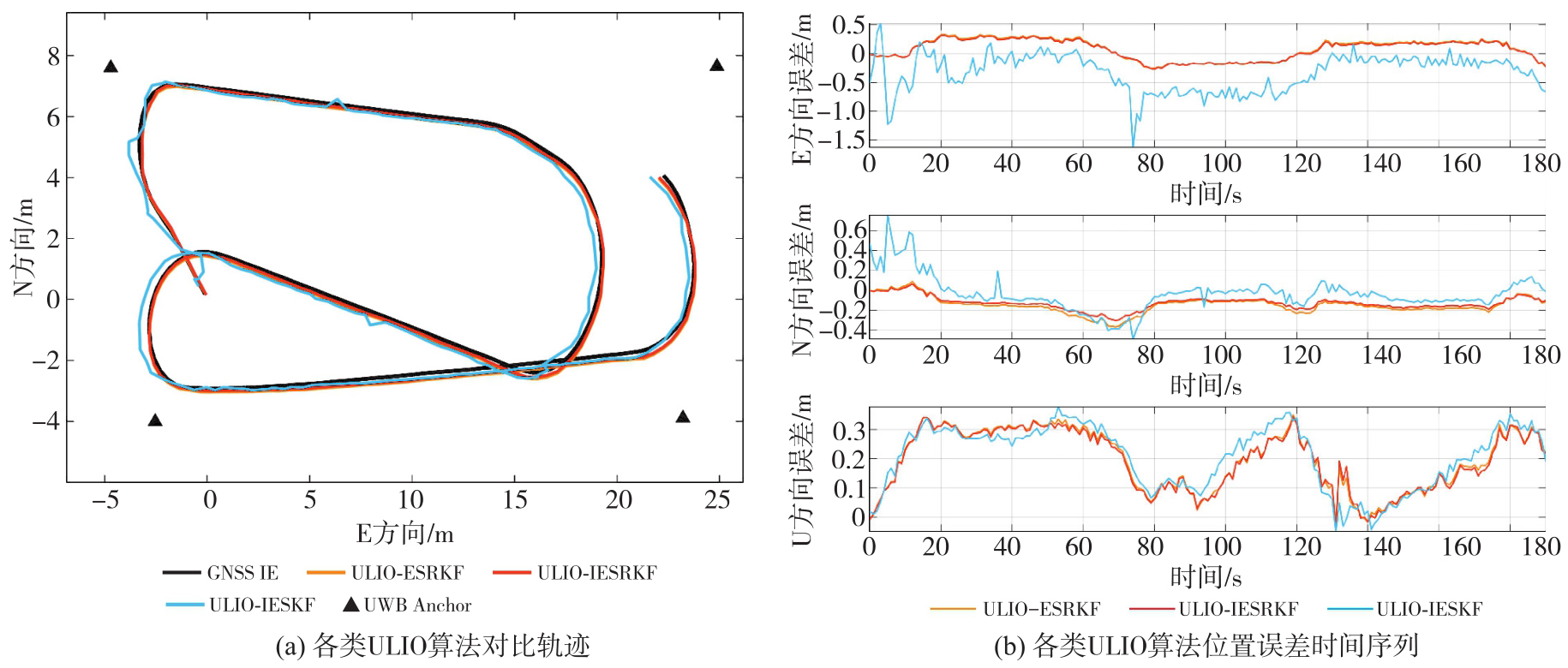
Tab. 8
Position error RMSE, maximum value, and average value for ULIO-IESKF and ULIO-IESRKF algorithms in NLOS environments"
| 误差指标 | 方向 | ULIO-IESKF | ULIO-IESRKF |
|---|---|---|---|
| RMSE | E | 0.285 | 0.158 |
| N | 0.238 | 0.133 | |
| U | 0.208 | 0.188 | |
| 平面 | 0.371 | 0.199 | |
| 最大值 | E | 1.630 | 0.316 |
| N | 0.758 | 0.304 | |
| U | 0.377 | 0.343 | |
| 平均值 | E | -0.330 | 0.068 |
| N | -0.036 | -0.093 | |
| U | 0.206 | 0.183 |
Tab. 9
Statistical table of average computational time for various algorithms"
| 算法 | 耗时 |
|---|---|
| UWB | 0.61 |
| FAST-LIO2 | 8.58 |
| ULIO-LC | 9.21 |
| ULIO-ESRKF | 10.23 |
| ULIO-IESRKF | 12.55 |
| [1] | 杨元喜, 任夏, 贾小林, 等. 以北斗系统为核心的国家安全PNT体系发展趋势[J]. 中国科学:地球科学, 2023, 53(5): 917-927. |
| YANG Yuanxi, REN Xia, JIA Xiaolin, et al. Development trends of the national secure PNT system based on BDS[J]. Scientia Sinica (Terrae), 2023, 53(5): 917-927. | |
| [2] | REN Xia, YANG Yuanxi. Development of comprehensive PNT and resilient PNT[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 1-8. |
| [3] | WANG Shoude, AHMAD N S. A comprehensive review on sensor fusion techniques for localization of a dynamic target in GPS-denied environments[J]. IEEE Access, 2025, 13: 2252-2285. |
| [4] | VAN GOOR P, HAMEL T, MAHONY R. Synchronous observer design for inertial navigation systems with almost-global convergence[J]. Automatica, 2025, 177: 112328. |
| [5] | WANG Jian, HAN Houzeng, LIU Fei, et al. Performance analysis of GNSS/MIMU tight fusion positioning model with complex scene feature constraints[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(2): 1-13. |
| [6] | NIU Xiaoji, DAI Yuhang, LIU Tianyi, et al. Feature-based GNSS positioning error consistency optimization for GNSS/INS integrated system[J]. GPS Solutions, 2023, 27(2): 89. |
| [7] | YUE Xiangdi, ZHANG Yihuan, CHEN Jiawei, et al. LiDAR-based SLAM for robotic mapping: state of the art and new frontiers[J]. Industrial Robot: the International Journal of Robotics Research and Application, 2024, 51(2): 196-205. |
| [8] | YAN Li, DAI Jicheng, TAN Junxiang, et al. Global fine registration of point cloud in LiDAR SLAM based on pose graph[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(2): 26-35. |
| [9] | JIA Xiang, NING Yipeng, CHAI Dashuai, et al. EGLT-SLAM: real-time visual-inertial SLAM based on entropy-guided line tracking[J]. IEEE Sensors Journal, 2024, 24(20): 32757-32771. |
| [10] | LEE D, JUNG M, YANG W, et al. LiDAR odometry survey: recent advancements and remaining challenges[J]. Intelligent Service Robotics, 2024, 17(2): 95-118. |
| [11] | 郭永强, 于喜志, 黄晓芬, 等. UWB定位应用综述[J]. 数字技术与应用, 2023, 41(2): 32-37. |
| GUO Yongqiang, YU Xizhi, HUANG Xiaofen, et al. Overview of UWB positioning application[J]. Digital Technology & Application, 2023, 41(2): 32-37. | |
| [12] | YU Baoguo, HUANG Lu, BAO Yachuan, et al. Research status and trends of indoor positioning and navigation technology in China[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 87-101. |
| [13] | WANG Sen, DAI Peipei, XU Tianhe, et al. Application of variational Bayesian-based cubature information filter for UWB/INS tightly coupled positioning system[J]. Measurement Science and Technology, 2025, 36(4): 046302. |
| [14] | ZHU Feng, XU Zhuo, ZHANG X, et al. On state estimation in multi-sensor fusion navigation: optimization and filtering[EB/OL]. [2025-07-22]. https://arxiv.org/abs/2401.05836. |
| [15] | ZHU Jiaming, ZHOU Han, WANG Ziyi, et al. Improved multi-sensor fusion positioning system based on GNSS/LiDAR/vision/IMU with semi-tight coupling and graph optimization in GNSS challenging environments[J]. IEEE Access, 2023, 11: 95711-95723. |
| [16] | LI Xingxing, ZHANG Xiaohong, NIU Xiaoji, et al. Progress and achievements of multi-sensor fusion navigation in China during 2019—2023[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 102-114. |
| [17] | 朱锋. GNSS/SINS/视觉多传感器融合的精密定位定姿方法与关键技术[D]. 武汉: 武汉大学, 2019. |
| ZHU Feng. Precise positioning and orientation methods and key technologies for GNSS/SINS/vision multi-sensor fusion[D]. Wuhan: Wuhan University, 2019. | |
| [18] | WANG Xuyin, GAO Fangzheng, HUANG Jiacai, et al. UWB/LiDAR tightly coupled positioning algorithm based on ISSA optimized particle filter[J]. IEEE Sensors Journal, 2024, 24(7): 11217-11228. |
| [19] | DAI Peipei, WANG Sen, XU Tianhe, et al. BDS-3 RTK/UWB semi-tightly coupled integrated positioning system in harsh environments[J]. Measurement Science and Technology, 2024, 35(3): 036306. |
| [20] | XU Xiaobin, ZHANG Lei, YANG Jian, et al. A review of multi-sensor fusion SLAM systems based on 3D LiDAR[J]. Remote Sensing, 2022, 14(12): 2835. |
| [21] | SHAN Tixiao, ENGLOT B, MEYERS D, et al. LIO-SAM: tightly-coupled LiDAR inertial odometry via smoothing and mapping[C]//Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 5135-5142. |
| [22] | QIN Chao, YE Haoyang, PRANATA C E, et al. LINS: a LiDAR-inertial state estimator for robust and efficient navigation[C]//Proceedings of 2020 IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 8899-8906. |
| [23] | XU Wei, CAI Yixi, HE Dongjiao, et al. FAST-LIO2: fast direct LiDAR-inertial odometry[J]. IEEE Transactions on Robotics, 2022, 38(4): 2053-2073. |
| [24] | WU Yibin, GUADAGNINO T, WIESMANN L, et al. LIO-EKF: high frequency LiDAR-inertial odometry using extended Kalman filters[C]//Proceedings of 2024 IEEE International Conference on Robotics and Automation. Yokohama: IEEE, 2024: 13741-13747. |
| [25] | JI Pengfei, DUAN Zhongxing, XU Weisheng. A combined UWB/IMU localization method with improved CKF[J]. Sensors, 2024, 24(10): 3165. |
| [26] | SUN Wei, ZHANG Heming, DING Wei, et al. UWB/IMU integrated indoor positioning algorithm based on robust extended Kalman filter[J]. Measurement Science and Technology, 2025, 36(1): 016303. |
| [27] | ZHU Wenjie, ZHAO Rongyong, ZHANG Hao, et al. Improved indoor positioning model based on UWB/IMU tight combination with double-loop cumulative error estimation[J]. Applied Sciences, 2023, 13(18): 10046. |
| [28] | FAN Zheng, ZHANG Lele, WANG Xueyi, et al. LiDAR, IMU, and camera fusion for simultaneous localization and mapping:a systematic review[J]. Artificial Intelligence Review, 2025, 58(6): 174. |
| [29] | FAN Jinlong, NING Yipeng, WANG Jian, et al. EMS-SLAM: dynamic RGB-D SLAM with semantic-geometric constraints for GNSS-denied environments[J]. Remote Sensing, 2025, 17(10): 1691. |
| [30] | DELLENBACH P, DESCHAUD J E, JACQUET B, et al. CT-ICP: real-time elastic LiDAR odometry with loop closure[C]//Proceedings of 2022 International Conference on Robotics and Automation. Philadelphia: IEEE, 2022: 5580-5586. |
| [31] | QIAN Zhentian, FU Jie, XIAO Jing. Towards accurate loop closure detection in semantic SLAM with 3D semantic covisibility graphs[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2455-2462. |
| [32] | WEN Weisong, HSU L T. AGPC-SLAM: absolute ground plane constrained 3D LiDAR SLAM[J]. NAVIGATION: Journal of the Institute of Navigation, 2022, 69(3): navi.527. |
| [33] | KUANG Yujin, HU Tongfei, OUYANG Mujiao, et al. Tightly coupled LiDAR/IMU/UWB fusion via resilient factor graph for quadruped robot positioning[J]. Remote Sensing, 2024, 16(22): 4171. |
| [34] | ZHANG Tisheng, YUAN Man, WEI Linfu, et al. MR-ULINS: a tightly-coupled UWB-LiDAR-inertial estimator with multi-epoch outlier rejection[J]. IEEE Robotics and Automation Letters, 2024, 9(12): 11786-11793. |
| [35] | XIN Rui, GUO Ningyan, MA Xingyu, et al. RLI-SLAM: fast robust ranging-LiDAR-inertial tightly-coupled localization and mapping[J]. Sensors, 2024, 24(17): 5672. |
| [36] | 徐爱功, 高佳鑫, 隋心, 等. 惯性测量单元辅助的LiDAR动态点云剔除方法[J]. 测绘科学, 2023, 48(5): 173-182. |
| XU Aigong, GAO Jiaxin, SUI Xin, et al. IMU-assisted LiDAR dynamic point cloud elimination method[J]. Science of Surveying and Mapping, 2023, 48(5): 173-182. | |
| [37] | XU Wei, ZHANG Fu. FAST-LIO: a fast, robust LiDAR-inertial odometry package by tightly-coupled iterated Kalman filter[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 3317-3324. |
| [38] | ZHANG Jiashi, ZHANG Chengyang, WU Jun, et al. LiDAR-inertial 3D SLAM with plane constraint for multi-story building[EB/OL]. [2025-07-22]. https://arxiv.org/abs/2202.08487. |
| [39] | NGUYEN T H, YUAN Shenghai, XIE Lihua. VR-SLAM: a visual-range simultaneous localization and mapping system using monocular camera and ultra-wideband sensors[EB/OL]. [2025-07-22]. https://arxiv.org/abs/2303.10903. |
| [40] | 徐爱功, 王鹏语, 隋心, 等. 非视距环境下基于PSO-SVM和RAIM的UWB定位方法[J]. 测绘科学, 2023, 48(4): 1-9, 45. |
| XU Aigong, WANG Pengyu, SUI Xin, et al. UWB localization method based on PSO-SVM and RAIM in NLOS environment[J]. Science of Surveying and Mapping, 2023, 48(4): 1-9, 45. | |
| [41] | 隋心, 马昊楠, 王长强, 等. 基于LiDAR点云的UWB NLOS识别及室内融合定位算法[J]. 地球信息科学学报, 2024, 26(12): 2686-2700. |
| SUI Xin, MA Haonan, WANG Changqiang, et al. Recognition of UWB NLOS in LiDAR point clouds and indoor fusion positioning algorithm[J]. Journal of Geo-information Science, 2024, 26(12): 2686-2700. | |
| [42] | 马杰, 王雯, 邓辰龙, 等. 动态观测权调整的GNSS/INS抗差因子图优化算法[J/OL]. 武汉大学学报(信息科学版), 1-16[2025-07-22]. https://doi.org/10.13203/j.whugis20240493. |
| MA Jie, WANG Wen, DENG Chenlong, et al. GNSS/INS robust factor graph optimization algorithm with dynamic observation weight adjustment[J/OL]. Geomatics and Information Science of Wuhan University, 1-16[2025-07-22]. https://doi.org/10.13203/j.whugis20240493. | |
| [43] | IM G. Notes on various errors and Jacobian derivations for SLAM[EB/OL]. [2025-07-22]. https://arxiv.org/abs/2406.06422. |
| [44] | CHEN Kai, ZHAN Kai, PANG Fan, et al. R-LIO: rotating lidar inertial odometry and mapping[J]. Sustainability, 2022, 14(17): 10833. |
| [45] | TANG Hailiang, ZHANG Tisheng, NIU Xiaoji, et al. FF-LINS: a consistent frame-to-frame solid-state-LiDAR-inertial state estimator[J]. IEEE Robotics and Automation Letters, 2023, 8(12): 8525-8532. |
| [1] | Jianghui GENG, Feng WANG. Componentized PNT framework for blind-plug-and-play multi-sensor fusion and its principles and experimental verification [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 787-797. |
| [2] | Feng ZHU, Yuanmu LIAO, Rui ZHOU, Xiaohong ZHANG. Continuous-time state estimation methods for multi-sensor fusion navigation [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(5): 798-808. |
| [3] | Rui ZHOU, Feng ZHU, Xiaohong ZHANG. Camera-IMU extrinsic calibration based on prior poses and motion planning [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 465-476. |
| [4] | Weitong WU, Chi CHEN, Bisheng YANG, Xiufeng HE. Robust multi-sensor fusion-based odometry method of LiDAR, millimeter-wave radar and IMU in degraded scenes [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(9): 1677-1686. |
| [5] | Feifei TANG, Junzhe ZHOU, Changhan WANG, Jianyun WANG, Yutao ZHOU, Yafei HAO. Quantitative analysis method for the time lag effect of rainfall-reservoir water level-landslide deformation [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(9): 1687-1696. |
| [6] | Dongdong PU, Hongzhou CHAI, Yongzhong OUYANG, Chao DONG. Hierarchical encryption matching algorithm for adjacent strip splicing in airborne LiDAR bathymetry [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(8): 1439-1451. |
| [7] | Jie WAN, Zhong XIE, Yongyang XU, Liufeng TAO. A U-shaped graph convolution network method for semantic segmentation of vehicle LiDAR point clouds towards urban road scenes [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1280-1293. |
| [8] | Dianpeng SU, Bin WANG, Xiaozheng MAI, Huang MENG, Chao QI, Fanlin YANG. Calibration of placement angle errors of airborne bathymetric LiDAR without field control [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(6): 1042-1053. |
| [9] | Lianzhong XU, Chuanfa CHEN, Dongxing CHEN, Xingjie WANG, Ziming YANG, Shufan YANG, Zhuangzhuang HONG, Jinda HAO. An efficient filtering method considering terrain features for large-scale airborne LiDAR point clouds [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(6): 1082-1093. |
| [10] | Haolong GAO, Shaobo LI, Jianhu ZHAO. Multipath negative outlier removal method for coastal LiDAR point clouds based on mirror structure and intensity feature constraints [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(5): 840-852. |
| [11] | Weilian LI, Jun ZHU, Qing ZHU, Jialuo LI. A 3D modelling method for temperature field of mountain bridges coupled with numerical simulation and spatio-temporal interpolation fusion [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(4): 749-759. |
| [12] | Xinna LI, Songhui HAN, Ke CHEN, Jie GUO. An index of multicollinearity diagnosis based on Rayleigh quotient [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(3): 422-431. |
| [13] | Xing ZHANG, Zhanpeng HUANG, Qingquan LI, Baoding ZHOU, Qipei LI. 3D tunnel mapping method combining registration compensation and spatial constraint [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(2): 297-307. |
| [14] | Wei PENG, Jing YANG, Haiqiang FU, Jianjun ZHU, Dong ZENG. UAV-borne repeat-pass InSAR data processing method considering motion error characteristics [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(11): 1954-1967. |
| [15] | Hongfa WAN, Shanshan LI, Xinxing LI, Haopeng FAN, Xuli TAN. Simulation and accuracy analysis of real-time underwater gravity measurement data [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 40-51. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||