

Acta Geodaetica et Cartographica Sinica ›› 2025, Vol. 54 ›› Issue (8): 1439-1451.doi: 10.11947/j.AGCS.2025.20240458
• Marine Survey • Previous Articles Next Articles
Dongdong PU1,2( ), Hongzhou CHAI1(), Yongzhong OUYANG3, Chao DONG2,4
), Hongzhou CHAI1(), Yongzhong OUYANG3, Chao DONG2,4
Received:2024-11-11
Revised:2025-05-14
Online:2025-09-16
Published:2025-09-16
Contact:
Hongzhou CHAI
E-mail:pudd2022@163.com;chaihz1969@163.com
About author:PU Dongdong (1993—), male, PhD candidate, majors in marine geodesy. E-mail: pudd2022@163.com
Supported by:CLC Number:
Dongdong PU, Hongzhou CHAI, Yongzhong OUYANG, Chao DONG. Hierarchical encryption matching algorithm for adjacent strip splicing in airborne LiDAR bathymetry[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(8): 1439-1451.

Fig. 1
Algorithm flowchart"

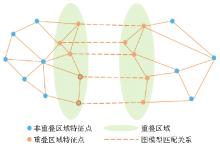
Fig. 2
Global graph model matching"


Fig. 3
Local encryption graph matching"

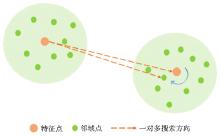
Fig. 4
One to multiple feature point matching mechanism"

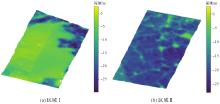
Fig. 5
Experimental data"

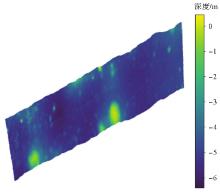
Fig. 6
Experimental comparison data"

Tab. 1
Initial attitude evaluation of experimental data"
| 数据 | RMSE | Max_D | Min_D |
|---|---|---|---|
| 区域Ⅰ | 0.893 | 0.921 | 0.321 |
| 区域Ⅱ | 1.030 | 1.372 | 0.293 |
| 区域Ⅲ | 0.945 | 1.376 | 0.404 |
Tab. 2
The Values of various parameters in feature point extraction"
| 数据 | δ1/m | δ2 | δ3/(个/m3) | δ4/m |
|---|---|---|---|---|
| 区域Ⅰ | 1.3 | 0.08 | 0.2 | 3.7 |
| 区域Ⅱ | 0.5 | 0.02 | 0.3 | 2.8 |
Tab. 3
Comparison of multi-scale robust feature extraction and single-scale feature extraction results"
| 数据 | 方法 | 对应点数量 | RE/rad | TE/m | OE/m |
|---|---|---|---|---|---|
| 区域Ⅰ | 单一尺度 | 275 | 0.136 | 0.201 | 0.115 |
| 多尺度 | 167 | 0.103 | 0.105 | 0.086 | |
| 区域Ⅱ | 单一尺度 | 496 | 0.140 | 0.173 | 0.103 |
| 多尺度 | 289 | 0.091 | 0.090 | 0.062 |
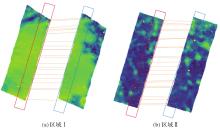
Fig. 7
Sampling distribution of significant feature point extraction in overlapping areas"

Tab. 4
Comparison of global graph model matching algorithm and RANSAC algorithm results"
| 数据 | 算法 | RE/rad | E/m | OE/m |
|---|---|---|---|---|
| 区域Ⅰ | RANSAC | 0.251 | 0.364 | 0.388 |
| 全局图匹配 | 0.109 | 0.136 | 0.105 | |
| 区域Ⅱ | RANSAC | 0.219 | 0.231 | 0.250 |
| 全局图匹配 | 0.097 | 0.102 | 0.099 |
Tab. 5
Comparison results of three methods on area Ⅰ and area Ⅱ"
| 数据 | 方法 | 对应点数量 | RE/rad | TE/m | OE/m |
|---|---|---|---|---|---|
| 区域Ⅰ | 方法1 | 854 | 0.046 | 0.092 | 0.054 |
| 方法2 | 854 | 0.023 | 0.056 | 0.035 | |
| 方法3 | 612 | 0.015 | 0.040 | 0.031 | |
| 区域Ⅱ | 方法1 | 1121 | 0.038 | 0.081 | 0.046 |
| 方法2 | 1121 | 0.020 | 0.045 | 0.032 | |
| 方法3 | 946 | 0.011 | 0.032 | 0.028 |

Fig. 8
Splicing results of three methods on area Ⅰ and area Ⅱ"

Tab. 6
Experimental results on area Ⅲ"
| 数据 | 方法 | 对应点数量 | RE/rad | TE/m | OE/m |
|---|---|---|---|---|---|
| 区域Ⅲ | 全局图匹配 | 428 | 0.110 | 0.125 | 0.104 |
| 方法1 | 1467 | 0.041 | 0.060 | 0.051 | |
| 方法2 | 1467 | 0.036 | 0.052 | 0.040 | |
| 方法3 | 1198 | 0.015 | 0.039 | 0.033 |
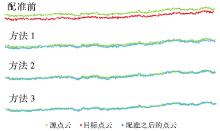
Fig. 9
Splicing resultson on area Ⅲ"

Tab. 7
Results of comparative experiments"
| 数据 | 算法 | RE/rad | TE/m | OE/m |
|---|---|---|---|---|
| 区域Ⅰ | RANSAC-ICP | 0.107 | 0.211 | 0.319 |
| 3D-NDT | 0.214 | 0.306 | 0.388 | |
| MCM | 0.046 | 0.060 | 0.146 | |
| 基于特征值匹配 | 0.063 | 0.103 | 0.185 | |
| 区域Ⅱ | RANSAC-ICP | 0.198 | 0.315 | 0.350 |
| 3D-NDT | 0.301 | 0.401 | 0.421 | |
| MCM | 0.046 | 0.090 | 0.151 | |
| 基于特征值匹配 | 0.033 | 0.058 | 0.090 | |
| 区域Ⅲ | RANSAC-ICP | 0.201 | 0.397 | 0.296 |
| 3D-NDT | 0.285 | 0.422 | 0.373 | |
| MCM | 0.036 | 0.088 | 0.106 | |
| 基于特征值匹配 | 0.028 | 0.071 | 0.098 |
Tab. 8
Comparison of time required by various methods"
| 数据 | RANSAC-ICP | 3D-NDT | MCM | 基于特征值匹配 | 方法1 | 方法2 | 方法3 |
|---|---|---|---|---|---|---|---|
| 区域Ⅰ | 366 | 326 | 237 | 62 | 61 | 70 | 75 |
| 区域Ⅱ | 405 | 377 | 289 | 74 | 78 | 82 | 89 |
| 区域Ⅲ | 550 | 472 | 401 | 85 | 72 | 85 | 93 |
| [1] | 宋艳朋, 梁佳. 机载激光测深数据处理研究综述[J]. 测绘与空间地理信息, 2023, 46(7): 45-47, 53. |
| SONG Yanpeng, LIANG Jia. Overview of research on data processing of airborne laser bathymetry[J]. Geomatics & Spatial Information Technology, 2023, 46(7): 45-47, 53. | |
| [2] | 刘焱雄, 郭锴, 何秀凤, 等. 机载激光测深技术及其研究进展[J]. 武汉大学学报(信息科学版), 2017, 42(9): 1185-1194. |
| LIU Yanxiong, GUO Kai, HE Xiufeng, et al. Research progress of airborne laser bathymetry technology[J]. Geomatics and Information Science of Wuhan University, 2017, 42(9): 1185-1194. | |
| [3] | GUENTHER G C, THOMAS R W L, LAROCQUE P E. Design considerations for achieving high accuracy with the SHOALS bathymetric LiDAR system[C]//Proceedings of 1996 Laser Remote Sensing of Natural Waters: from Theory to Practice. St. Petersburg: SPIE, 1996: 54-71. |
| [4] | YANG Bisheng, CHEN Chi. Automatic registration of UAV-borne sequent images and LiDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 101: 262-274. |
| [5] | 张凡, 徐文学, 唐玲, 等. 机载激光测深数据配准方法比较[J]. 南京信息工程大学学报(自然科学版), 2021, 13(6): 678-685. |
| ZHANG Fan, XU Wenxue, TANG Ling, et al. Comparison of airborne LiDAR bathymetry data registration methods[J]. Journal of Nanjing University of Information Science & Technology (Natural Science Edition), 2021, 13(6): 678-685. | |
| [6] | BESL P J, MCKAY N D. A method for registration of 3D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14(2): 239-256. |
| [7] | CHETVERIKOV D, STEPANOV D, KRSEK P. Robust Euclidean alignment of 3D point sets: the trimmed iterative closest point algorithm[J]. Image and Vision Computing, 2005, 23(3): 299-309. |
| [8] | 贺岩, 陶邦一, 俞家勇, 等. 机载激光测深技术及应用[J]. 中国激光, 2024, 51(11): 284-314. |
| HE Yan, TAO Bangyi, YU Jiayong, et al. Development of airborne LiDAR bathymetric technology and application[J]. Chinese Journal of Lasers, 2024, 51(11): 284-314. | |
| [9] | YANG Fanlin, SU Dianpeng, ZHANG Kai, et al. Mosaicing of airborne LiDAR bathymetry strips based on Monte Carlo matching[J]. Marine Geophysical Research, 2017, 38(3): 303-311. |
| [10] | JI Xue, YANG Bisheng, TANG Qiuhua, et al. A coarse-to-fine strip mosaicing model for airborne bathymetric LiDAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(10): 8129-8142. |
| [11] | XU Wenxue, ZHANG Fan, JIANG Tao, et al. Feature curve-based registration for airborne LiDAR bathymetry point clouds[J]. International Journal of Applied Earth Observation and Geoinformation, 2022, 112: 102883. |
| [12] | XU Wenxue, JIANG Zhengkun, GUO Yadong, et al. Registration of airborne LiDAR bathymetry seafloor point clouds based on the adaptive matching of corresponding points[J]. IEEE Geoscience and Remote Sensing Letters, 2024, 21: 3366416. |
| [13] | HUANG Xiaoshui, MEI Guofeng, ZHANG Jian. Cross-source point cloud registration: challenges, progress and prospects[J]. Neurocomputing, 2023, 548: 126383. |
| [14] | MONJI-AZAD S, HESSER J, LÖW N. A review of non-rigid transformations and learning-based 3D point cloud registration methods[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2023, 196: 58-72. |
| [15] | HUANG Rong, XU Yusheng, YAO Wei, et al. Robust global registration of point clouds by closed-form solution in the frequency domain[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2021, 171: 310-329. |
| [16] |
张广运, 韩一, 张荣庭, 等. 基于空间一致性的同平台点云配准方法[J]. 测绘学报, 2023, 52(5): 789-797. DOI: .
doi: 10.11947/j.AGCS.2023.20220262 |
|
ZHANG Guangyun, HAN Yi, ZHANG Rongting, et al. A spatial consistency-based point cloud registration method for the same platform[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(5): 789-797. DOI: .
doi: 10.11947/j.AGCS.2023.20220262 |
|
| [17] | WEINMANN M, JUTZI B, MALLET C. Semantic 3D scene interpretation: a framework combining optimal neighborhood size selection with relevant features[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2014, II-3: 181-188. |
| [18] | WEINMANN M, JUTZI B, HINZ S, et al. Semantic point cloud interpretation based on optimal neighborhoods, relevant features and efficient classifiers[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 105: 286-304. |
| [19] | LIVI L, RIZZI A. The graph matching problem[J]. Pattern Analysis and Applications, 2013, 16(3): 253-283. |
| [20] | JIA Shoujun, LIU Chun, WU Hangbin, et al. Incremental registration towards large-scale heterogeneous point clouds by hierarchical graph matching[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2024, 213: 87-106. |
| [21] | FU Kexue, LIU Shaolei, LUO Xiaoyuan, et al. Robust point cloud registration framework based on deep graph matching[C]//Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville: IEEE, 2021: 8889-8898. |
| [22] | YAN Li, DAI Jicheng, TAN Junxiang, et al. Global fine registration of point cloud in LiDAR SLAM based on pose graph[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(2): 26-35. |
| [23] | ZANFIR A, SMINCHISESCU C. Deep learning of graph matching[C]//Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 2684-2693. |
| [24] | MUNKRES J. Algorithms for the assignment and transportation problems[J]. Journal of Society for Industrial and Applied Mathematics, 1957, 5(1): 32-38. |
| [25] | LU Fan, CHEN Guang, LIU Yinlong, et al. Sparse-to-dense matching network for large-scale LiDAR point cloud registration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(9): 11270-11282. |
| [26] | PANKAJ D S, NIDAMANURI R R. A robust estimation technique for 3d point cloud registration[J]. Image Analysis & Stereology, 2016, 35(1): 15-28. |
| [27] | STOYANOV T, MAGNUSSON M, ANDREASSON H, et al. Fast and accurate scan registration through minimization of the distance between compact 3D NDT representations[J]. The International Journal of Robotics Research, 2012, 31(12): 1377-1393. |
| [1] | Dianpeng SU, Bin WANG, Xiaozheng MAI, Huang MENG, Chao QI, Fanlin YANG. Calibration of placement angle errors of airborne bathymetric LiDAR without field control [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(6): 1042-1053. |
| [2] | Jun ZHU, Peijing CHEN, Chao ZENG, Quanhong ZHENG, Yakun XIE, Jigang YOU, Huijie LIAN. Knowledge-guided dynamic generation of escape route networks for forest fires [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1086-1097. |
| [3] | WANG Dandi, XU Qing, XING Shuai, LIN Yuzhun, ZHANG Guoping. Semi-empirical waveform decomposition method for correction of near water surface penetration error in airborne LiDAR bathymetry [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(6): 944-955. |
| [4] | SU Dianpeng, YAN Doudou, CHEN Liang, CHEN Yu, DONG Jian, WU Di, YU Xiaolin. Surface-volume-bottom joint-filtering algorithm for Airborne LiDAR bathymetric point cloud [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(4): 614-623. |
| [5] | WANG Dandi, XING Shuai, XU Qing, LIN Yuzhun, LI Pengcheng. Automatic sea-land waveform classification method for single-wavelength airborne LiDAR bathymetry [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(5): 750-761. |
| [6] | GAO Yaping, CHEN Xi, TU Rui. Application of dynamic optimization time-delay GM(1,2) model in landslide displacement prediction considering the influence of rainfall [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(10): 2183-2195. |
| [7] | WANG Dandi, XU Qing, XING Shuai, LIN Yuzhun, LI Pengcheng. A Coarse-to-fine Signal Detection Method for Airborne LiDAR Bathymetry [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(8): 1148-1159. |
| [8] | DING Kai, LI Qingquan, ZHU Jiasong, WANG Chisheng, GUAN Minglei, CUI Yang, YANG Chao, XU Tian. Evaluation of Airborne LiDAR Bathymetric Parameters on the Northern South China Sea Based on MODIS Data [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(2): 180-187. |
| [9] | WANG Dandi, XU Qing, XING Shuai, LIN Yuzhun, LI Pengcheng. Comparison of Signal Extraction Method for Airborne LiDAR Bathymetry Based on Deconvolution [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(2): 161-169. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||