

Acta Geodaetica et Cartographica Sinica ›› 2026, Vol. 55 ›› Issue (3): 515-524.doi: 10.11947/j.AGCS.2026.20250356
• Marine Surveying and Mapping • Previous Articles Next Articles
Jiachao BIAN1( ), Shuqiang XUE1(), Shuang ZHAO2, Jixing ZHU1, Jinlai GAO1, Baojin LI2
), Shuqiang XUE1(), Shuang ZHAO2, Jixing ZHU1, Jinlai GAO1, Baojin LI2
Received:2025-09-01
Revised:2026-03-05
Online:2026-04-16
Published:2026-04-16
Contact:
Shuqiang XUE
E-mail:bjc0539@163.com;xuesq@casm.ac.cn
About author:BIAN Jiachao (2000—), male, master, major in ocean acoustic navigation. E-mail: bjc0539@163.com
Supported by:CLC Number:
Jiachao BIAN, Shuqiang XUE, Shuang ZHAO, Jixing ZHU, Jinlai GAO, Baojin LI. Multi-window joint robust estimation for marine acoustic navigation[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 515-524.
Fig. 1
Sliding window mode for carrier trajectory estimation"
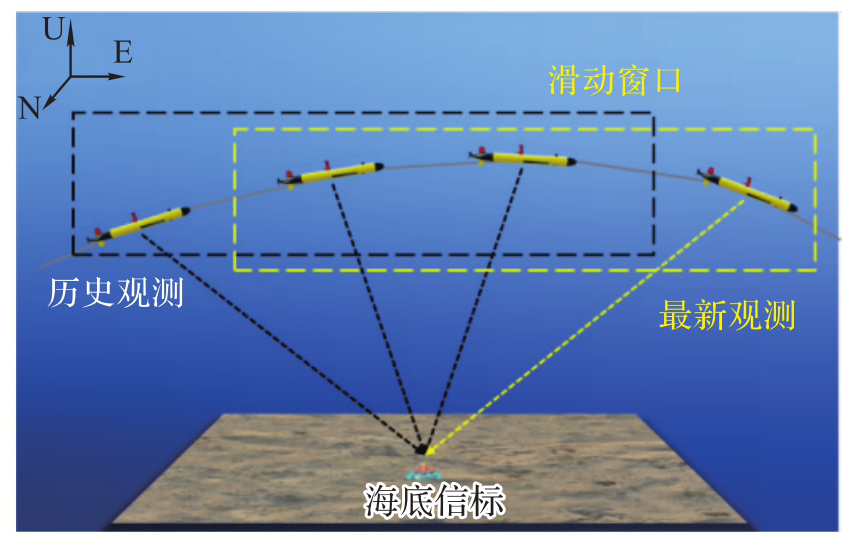

Fig. 2
Flowchart of robust equivalent weight update"

Fig. 3
Spatial distribution of seafloor beacons and surveying line"
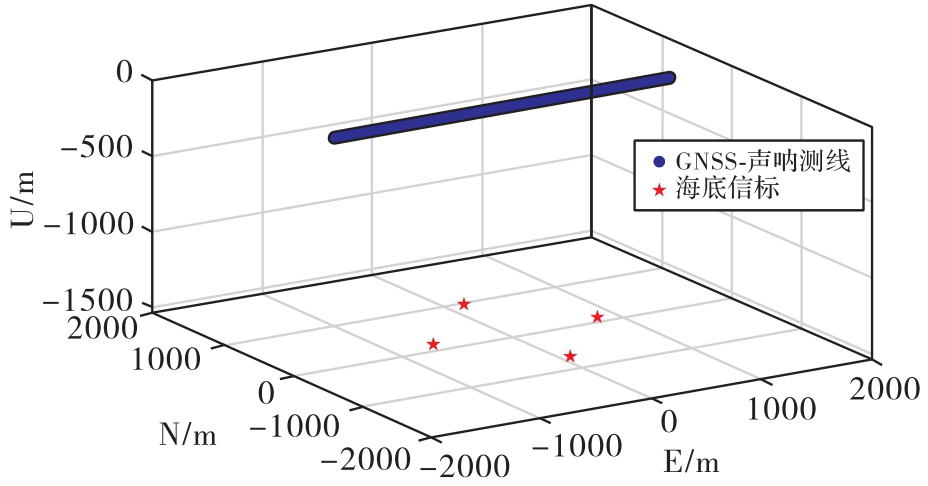
Fig. 4
Comparison of acoustic navigation and positioning trajectory and GNSS trajectory plane"
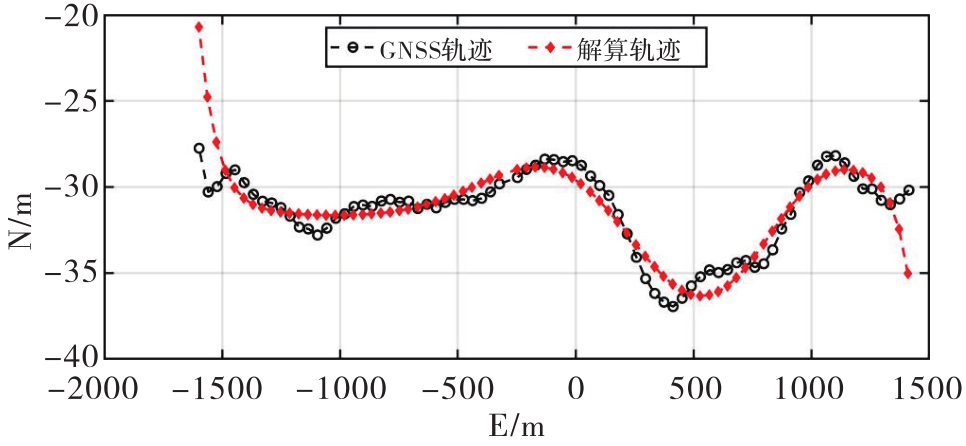
Fig. 5
Observation residuals and positioning errors"
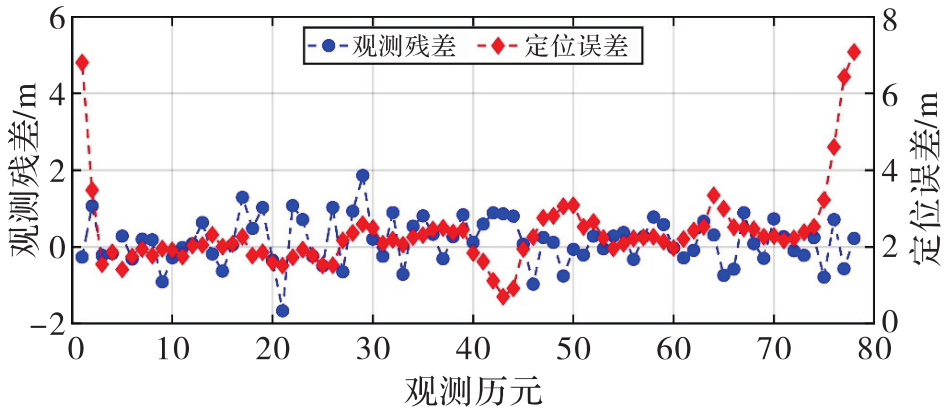
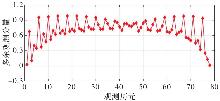
Fig. 6
Distribution of redundant observation components"
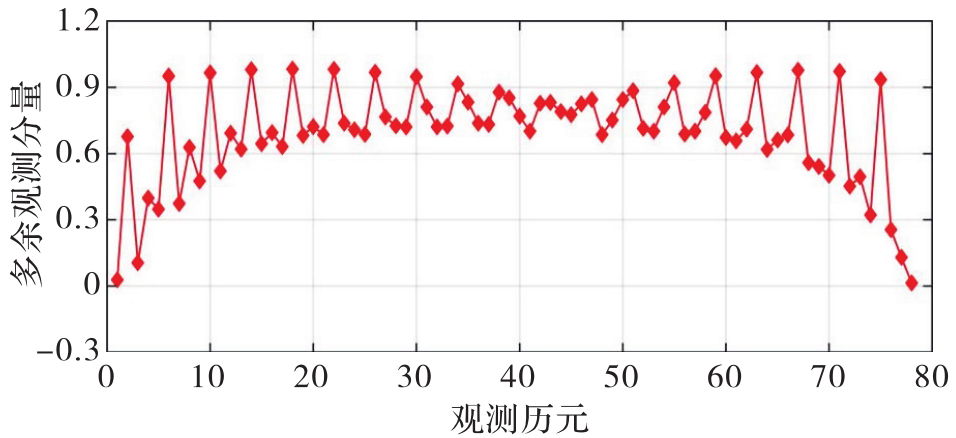
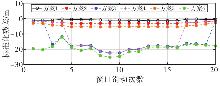
Fig. 7
Standardized observation residual sequence"
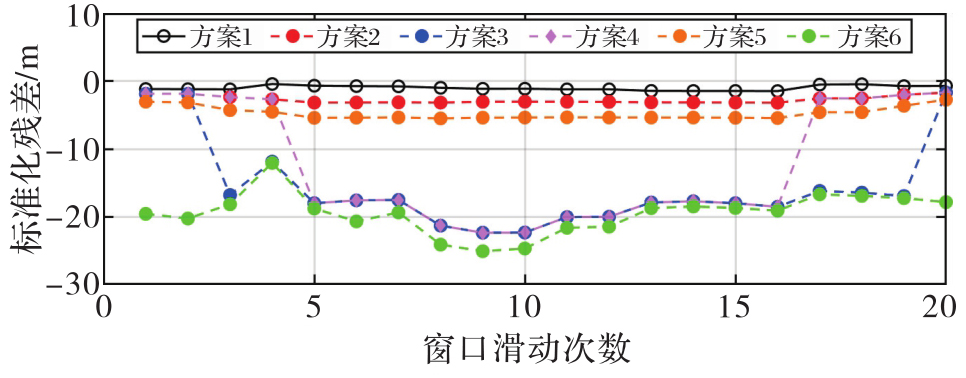
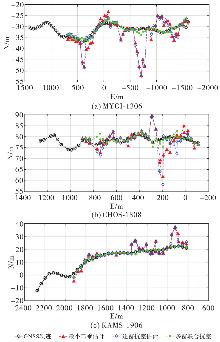
Fig. 8
Comparison of navigation results between window-by-window robust estimation and multi-window joint robust estimation"
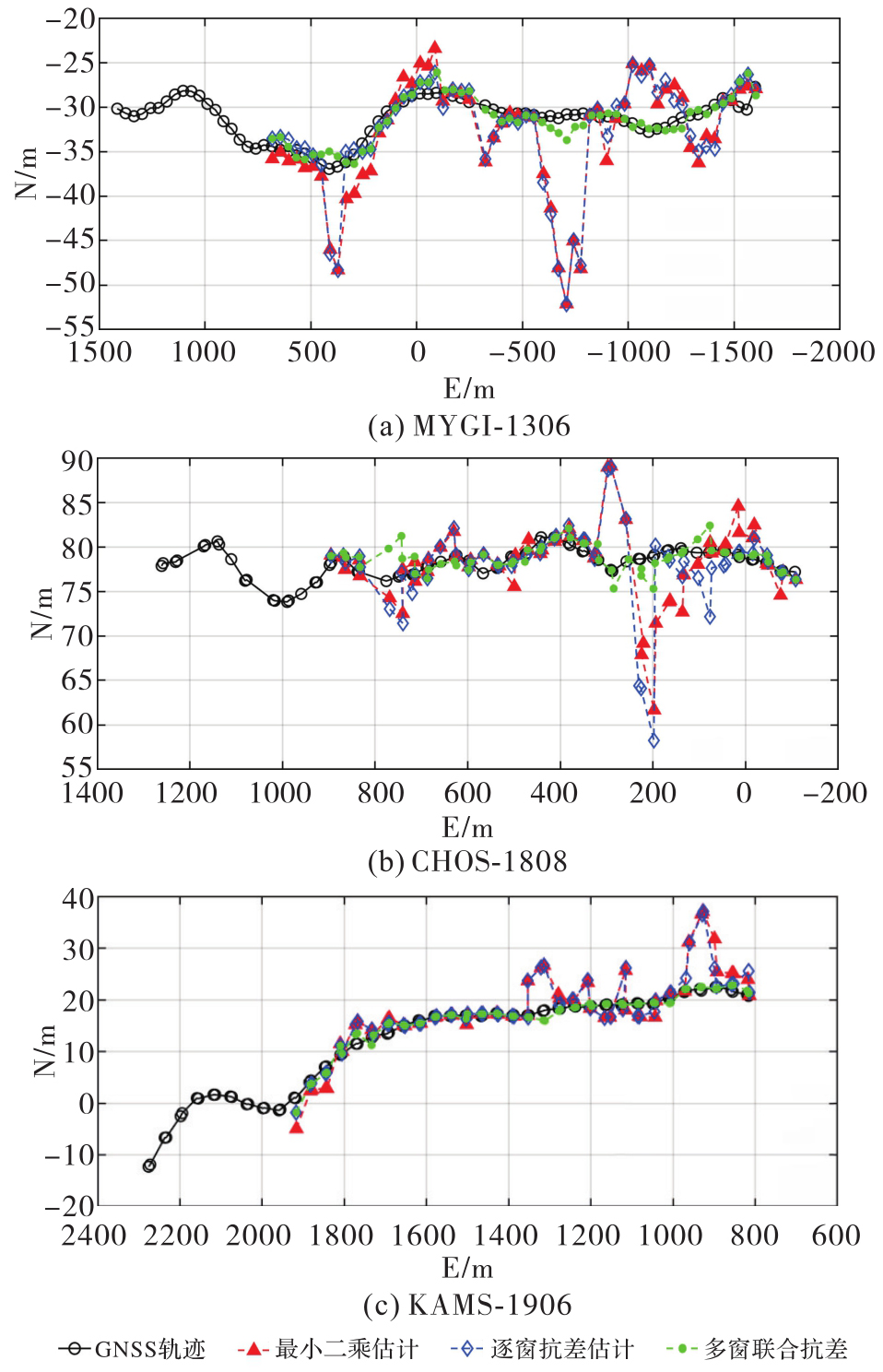

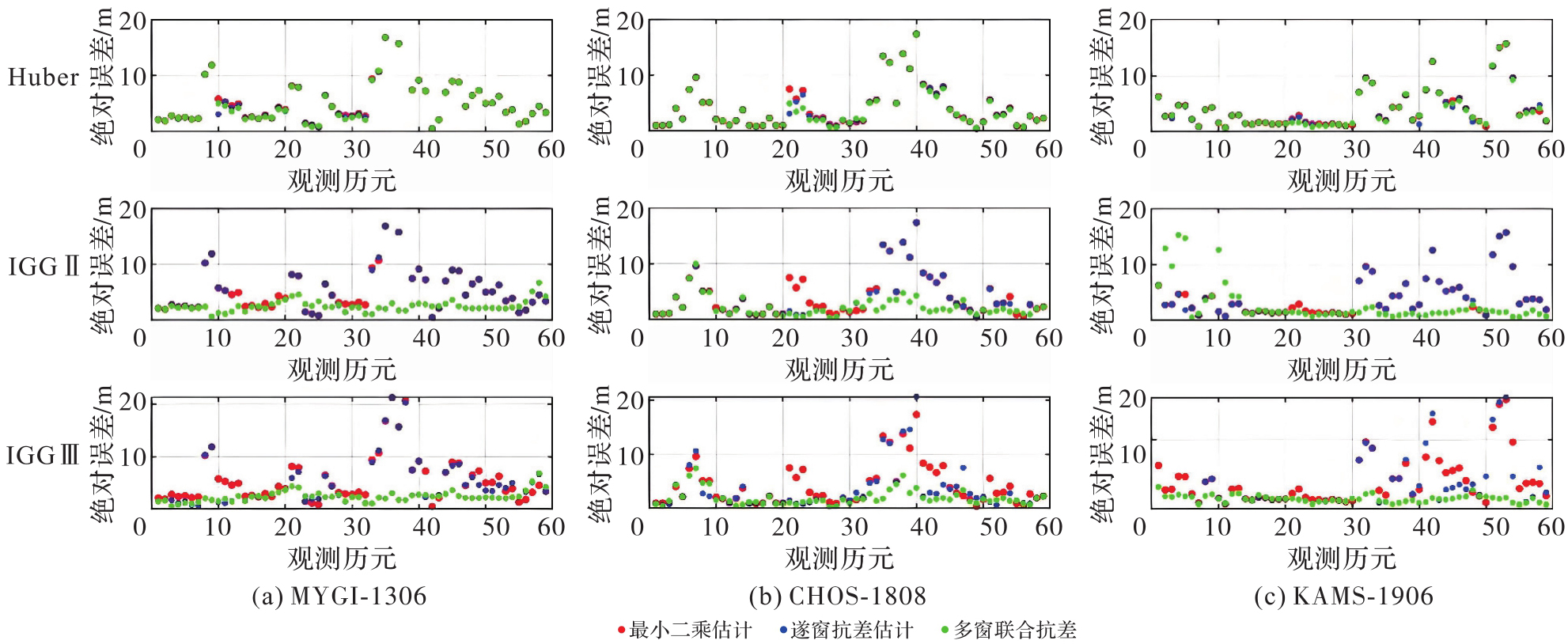
Fig. 9
Absolute errors of navigation and positioning"
Tab. 1
Statistics of absolute errors of navigation and positioning based on different robust estimation methods"
| 数据集 | 解算方案 | 抗差方案 | E绝对误差 | N绝对误差 | 定位绝对误差 | |||
|---|---|---|---|---|---|---|---|---|
| 均值 | 标准差 | 均值 | 标准差 | 均值 | 标准差 | |||
| MYGI-1306 | 逐窗抗差估计 | Huber | 3.16 | 2.23 | 3.77 | 4.61 | 5.45 | 4.54 |
| IG Ⅱ | 3.08 | 2.26 | 3.65 | 4.68 | 5.31 | 4.64 | ||
| IG Ⅲ | 2.72 | 2.19 | 3.48 | 4.69 | 4.96 | 4.56 | ||
| 多窗联合抗差 | Huber | 3.14 | 2.25 | 3.76 | 4.60 | 5.41 | 4.29 | |
| IG Ⅱ | 2.41 | 3.10 | 1.93 | 3.37 | 3.25 | 4.47 | ||
| IG Ⅲ | 2.08 | 1.07 | 0.87 | 0.77 | 2.38 | 1.07 | ||
| CHOS-1808 | 逐窗抗差估计 | Huber | 2.48 | 2.17 | 2.56 | 3.51 | 3.98 | 3.72 |
| IG Ⅱ | 2.24 | 2.09 | 2.51 | 3.52 | 3.72 | 3.77 | ||
| IG Ⅲ | 1.88 | 1.70 | 2.40 | 4.05 | 3.46 | 4.07 | ||
| 多窗联合抗差 | Huber | 2.42 | 2.09 | 2.51 | 3.49 | 3.89 | 3.69 | |
| IG Ⅱ | 1.79 | 1.58 | 0.99 | 0.97 | 2.18 | 1.70 | ||
| IG Ⅲ | 1.64 | 1.32 | 0.91 | 0.96 | 1.99 | 1.49 | ||
| KAMS-1906 | 逐窗抗差估计 | Huber | 2.34 | 2.01 | 2.72 | 3.37 | 4.02 | 3.48 |
| IG Ⅱ | 2.30 | 2.04 | 2.66 | 3.38 | 3.94 | 3.52 | ||
| IG Ⅲ | 2.23 | 2.21 | 2.27 | 3.29 | 3.51 | 3.68 | ||
| 多窗联合抗差 | Huber | 2.33 | 2.02 | 2.50 | 3.44 | 3.86 | 3.56 | |
| IG Ⅱ | 1.47 | 0.92 | 2.11 | 2.90 | 2.86 | 2.77 | ||
| IG Ⅲ | 1.19 | 0.45 | 0.66 | 0.64 | 1.44 | 0.51 | ||
Tab. 2
Statistics of absolute navigation errors under different window sizes"
| 数据集 | 窗口大小 | 解算方案 | E绝对误差 | N绝对误差 | 定位绝对误差 | |||
|---|---|---|---|---|---|---|---|---|
| 均值 | 标准差 | 均值 | 标准差 | 均值 | 标准差 | |||
| MYGI-1306 | 16历元 | 最小二乘估计 | 3.28 | 2.56 | 4.01 | 5.05 | 5.66 | 5.17 |
| 逐窗抗差估计 | 2.92 | 2.60 | 3.55 | 5.15 | 5.11 | 5.31 | ||
| 多窗联合抗差 | 2.22 | 0.91 | 0.76 | 0.82 | 2.47 | 0.95 | ||
| 20历元 | 最小二乘估计 | 3.21 | 2.25 | 3.84 | 4.58 | 5.54 | 4.51 | |
| 逐窗抗差估计 | 2.72 | 2.19 | 3.48 | 4.69 | 4.96 | 4.56 | ||
| 多窗联合抗差 | 2.08 | 1.07 | 0.87 | 0.77 | 2.38 | 1.07 | ||
| 24历元 | 最小二乘估计 | 3.14 | 1.90 | 4.06 | 4.21 | 5.61 | 4.01 | |
| 逐窗抗差估计 | 2.77 | 1.86 | 3.52 | 4.33 | 4.93 | 4.25 | ||
| 多窗联合抗差 | 2.14 | 1.17 | 1.01 | 0.96 | 2.57 | 1.15 | ||
| [1] |
杨元喜, 徐天河, 薛树强. 我国海洋大地测量基准与海洋导航技术研究进展与展望[J]. 测绘学报, 2017(1): 1-8. DOI: .
doi: 10.11947/j.AGCS.2017.20160519 |
|
YANG Yuanxi, XU Tianhe, XUE Shuqiang. Progresses and prospects in developing marine geodetic datum and marine navigation of China[J]. Acta Geodaetica et Cartographica Sinica, 2017(1): 1-8. DOI: .
doi: 10.11947/j.AGCS.2017.20160519 |
|
| [2] |
杨元喜. 弹性PNT基本框架[J]. 测绘学报, 2018, 47(7): 893-898. DOI: .
doi: 10.11947/j.AGCS.2018.20180149 |
|
YANG Yuanxi. Resilient PNT concept frame[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(7): 893-898. DOI: .
doi: 10.11947/j.AGCS.2018.20180149 |
|
| [3] | 阳凡林, 辛明真, 刘经南, 等. 超短基线多信标约束的深海动态定位方法探讨[J]. 武汉大学学报(信息科学版), 2023, 48(11): 1876-1883. |
| YANG Fanlin, XIN Mingzhen, LIU Jingnan, et al. Discussion of deep-sea dynamic positioning methods with ultra-short baseline multi-beacon constraint[J]. Geomatics and Information Science of Wuhan University, 2023, 48(11): 1876-1883. | |
| [4] | 薛树强, 杨诚, 赵爽, 等. 海底大地控制网无人观测系统研究进展[J]. 导航定位学报, 2023, 11(6): 8-21. |
| XUE Shuqiang, YANG Cheng, ZHAO Shuang, et al. Review of unmanned observation systems for seafloor geodetic network[J]. Journal of Navigation and Positioning, 2023, 11(6): 8-21. | |
| [5] |
赵爽, 王振杰, 刘慧敏. 顾及声线入射角的水下定位随机模型[J]. 测绘学报, 2018, 47(9): 1280-1289. DOI: .
doi: 10.11947/j.AGCS.2018.20170026 |
|
ZHAO Shuang, WANG Zhenjie, LIU Huimin. Investigation on underwater positioning stochastic model based on sound ray incidence angle[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(9): 1280-1289. DOI: .
doi: 10.11947/j.AGCS.2018.20170026 |
|
| [6] | 刘焱雄, 李梦昊, 刘杨, 等. 海底大地基准建设技术及其研究进展[J]. 海洋科学进展, 2022, 40(4): 684-700. |
| LIU Yanxiong, LI Menghao, LIU Yang, et al. Research progress of seafloor geodetic datum construction technology[J]. Advances in Marine Science, 2022, 40(4): 684-700. | |
| [7] | 薛树强, 杨元喜, 肖圳, 等. 全球导航卫星系统-声呐组合观测模型分类体系[J]. 哈尔滨工程大学学报, 2023, 44(11): 1857-1868. |
| XUE Shuqiang, YANG Yuanxi, XIAO Zhen, et al. Global navigation satellite system-acoustic combined observation model classification system[J]. Journal of Harbin Engineering University, 2023, 44(11): 1857-1868. | |
| [8] | YOKOTA Y, KANEDA M, HASHIMOTO T, et al. Experimental verification of seafloor crustal deformation observations by UAV-based GNSS-A[J]. Scientific Reports, 2023, 13(1): 4105. |
| [9] | 杨元喜. 条件平差、混合平差模型的抗差最小二乘解[J]. 测绘通报, 1995(1): 44-46. |
| YANG Yuanxi. Robust least squares solution of conditional adjustment and mixed adjustment models[J]. Bulletin of Surveying and Mapping, 1995(1): 44-46. | |
| [10] | 杨元喜, 徐天河. 基于移动开窗法协方差估计和方差分量估计的自适应滤波[J]. 武汉大学学报(信息科学版), 2003, 28(6): 714-718. |
| YANG Yuanxi, XU Tianhe. An adaptive Kalman filter combining variance component estimation with covariance matrix estimation based on moving window[J]. Geomatics and Information Science of Wuhan University, 2003, 28(6): 714-718. | |
| [11] | YANG Yuanxi, ZHANG Xiaodong, XU Junyi. Adaptively constrained Kalman filtering for navigation applications[J]. Survey Review, 2011, 43(322): 370-381. |
| [12] | 周江文. 再论拟合推估[J]. 测绘学报, 2001, 30(4): 283-285. |
| ZHOU Jiangwen. Further on collocation[J]. Acta Geodaetica et Cartographica Sinica, 2001, 30(4): 283-285. | |
| [13] | 杨元喜. 自适应抗差最小二乘估计[J]. 测绘学报, 1996, 25(3): 206-211. |
| YANG Yuanxi. Adaptively robust least squares estimation[J]. Acta Geodaetica et Cartographica Sinica, 1996, 25(3): 206-211. | |
| [14] | 杨元喜, 宋力杰, 徐天河. 大地测量相关观测抗差估计理论[J]. 测绘学报, 2002, 31(2): 95-99. |
| YANG Yuanxi, SONG Lijie, XU Tianhe. Robust parameter estimation for geodetic correlated observations[J]. Acta Geodaetica et Cartographica Sinica, 2002, 31(2): 95-99. | |
| [15] | 欧吉坤. 一种三步抗差方案的设计[J]. 测绘学报, 1996, 25(3): 173-179. |
| OU Jikun. Design of a new scheme of robust estimation by three steps[J]. Acta Geodaetica et Cartographica Sinica, 1996, 25(3): 173-179. | |
| [16] | 黄声享, 王金岭. 多余观测分量与可靠性度量指标研究[J]. 武汉测绘科技大学学报, 1997, 22(2): 114-118. |
| HUANG Shengxiang, WANG Jinling. Research on redundant observation components and reliability measures for correlated observations[J]. Journal of Wuhan Tehcnnical University of Surveying and Mapping, 1997, 22(2): 114-118. | |
| [17] |
闫凤池, 王振杰, 赵爽, 等. 顾及双程声径的常梯度声线跟踪水下定位算法[J]. 测绘学报, 2022, 51(1): 31-40. DOI: .
doi: 10.11947/j.AGCS.2022.20210234 |
|
YAN Fengchi, WANG Zhenjie, ZHAO Shuang, et al. A layered constant gradient acoustic ray tracing underwater positioning algorithm considering round-trip acoustic path[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(1): 31-40. DOI: .
doi: 10.11947/j.AGCS.2022.20210234 |
|
| [18] | 杨元喜, 刘焱雄, 孙大军, 等. 海底大地基准网建设及其关键技术[J]. 中国科学:地球科学, 2020, 50(7): 936-945. |
| YANG Yuanxi, LIU Yanxiong, SUN Dajun, et al. Seafloor geodetic network establishment and key technologies[J]. Scientia Sinica (Terrae), 2020, 50(7): 936-945. | |
| [19] | XUE Shuqiang, YANG Yuanxi, YANG Wenlong, et al. GNSS-a network solution with zenith acoustic delay estimation[J]. Marine Geodesy, 2024, 47(3): 237-268. |
| [20] | LARSEN M B. Synthetic long baseline navigation of underwater vehicles[C]//Proceedings of OCEANS 2000 MTS/IEEE Conference and Exhibition. New York: IEEE, 2002: 2043-2050. |
| [21] | 宋丽君, 赵万良, 成宇翔, 等. 基于滑动窗因子图优化的多源导航信息融合[J]. 飞控与探测, 2024, 7(5): 20-29. |
| SONG Lijun, ZHAO Wanliang, CHENG Yuxiang, et al. Multi-source navigation information fusion based on sliding window factor graph optimization[J]. Flight Control & Detection, 2024, 7(5): 20-29. | |
| [22] | 徐天河, 王森, 代培培. UWB/INS紧组合变分贝叶斯自适应滤波算法[J]. 导航定位学报, 2025, 13(2): 1-8. |
| XU Tianhe, WANG Sen, DAI Peipei. UWB/INS tightly coupled integration algorithm based on variational Bayesian adaptive Kalman filter[J]. Journal of Navigation and Positioning, 2025, 13(2): 1-8. | |
| [23] |
黄紫如, 柴洪洲, 向民志, 等. 基于抗差因子图的AUV多源信息融合定位方法[J]. 测绘学报, 2023, 52(8): 1278-1285. DOI: .
doi: 10.11947/j.AGCS.2023.20210735 |
|
HUANG Ziru, CHAI Hongzhou, XIANG Minzhi, et al. AUV multi-source information fusion localization method based on robust factor graph[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(8): 1278-1285. DOI: .
doi: 10.11947/j.AGCS.2023.20210735 |
|
| [24] | 段楚峰, 张昊楠, 匡翠林, 等. 应用曲线积分的地震勘探多缆定位算法[J]. 石油地球物理勘探, 2022, 57(6): 1317-1324. |
| DUAN Chufeng, ZHANG Haonan, KUANG Cuilin, et al. Multi-streamer positioning algorithm based on curvilinear integral for seismic exploration[J]. Oil Geophysical Prospecting, 2022, 57(6): 1317-1324. | |
| [25] | 薛树强, 杨诚, 卞加超, 等. 无外部信息辅助的主动式声呐时间开窗导航定位模型[J]. 武汉大学学报(信息科学版), 2026, 51(2): 296-305. |
| XUE Shuqiang, YANG Cheng, BIAN Jiachao, et al. Active sonar time-window navigation and positioning model without appending external navigation information[J]. Geomatics and Information Science of Wuhan University, 2026, 51(2): 296-305. | |
| [26] |
闫志闯, 徐新强, 赵德军, 等. 低轨卫星约化动力法定轨参数变换的高效算法[J]. 测绘学报, 2018, 47(S0): 28-37. DOI: .
doi: 10.11947/j.AGCS.2018.20180307 |
|
YAN Zhichuang, XU Xinqiang, ZHAO Dejun, et al. An efficient algorithm with reduced dynamic orbit determination for LEOs based on parameter transforming[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(S0): 28-37. DOI: .
doi: 10.11947/j.AGCS.2018.20180307 |
|
| [27] |
余文坤, 吴佩达, 张昊楠, 等. 基于多项式曲线拟合的海上地震勘探拖缆定位[J]. 测绘学报, 2022, 51(5): 772-780. DOI: .
doi: 10.11947/j.AGCS.2022.20200588 |
|
YU Wenkun, WU Peida, ZHANG Haonan, et al. Offshore towed-streamer seismic positioning based on polynomial curve fitting[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(5): 772-780. DOI: .
doi: 10.11947/j.AGCS.2022.20200588 |
|
| [28] | 宋力杰, 杨元喜. 均值漂移模型粗差探测法与LEGE法的比较[J]. 测绘学报, 1999, 28(4): 295-300. |
| SONG Lijie, YANG Yuanxi. Comparison between data snooping and LEGE[J]. Acta Geodaetica et Cartographica Sinica, 1999, 28(4): 295-300. | |
| [29] | 薛树强, 杨文龙, 赵爽. 主动式定位的椭球交会原理及其2种解法[J]. 导航定位学报, 2024, 12(3): 1-7. |
| XUE Shuqiang, YANG Wenlong, ZHAO Shuang. The ellipsoid intersection principle of active positioning and its two solutions[J]. Journal of Navigation and Positioning, 2024, 12(3): 1-7. | |
| [30] | WATANABE S I, ISHIKAWA T, YOKOTA Y, et al. GARPOS: analysis software for the GNSS-a seafloor positioning with simultaneous estimation of sound speed structure[J]. Frontiers in Earth Science, 2020, 8: 597532. |
| [31] | YANG Yuanxi, SONG Lijie, XU Tianhe. Robust estimator for correlated observations based on bifactor equivalent weights[J/OL]. Journal of Geodesy, 2002, 76(6): 353-358. |
| [32] | YANG Wenlong, XUE Shuqiang, LIU Yixu. P-order secant method for rapidly solving the ray inverse problem of underwater acoustic positioning[J]. Marine Geodesy, 2023, 46(1): 3-15. |
| [1] | Chaolong YAO, Hongrui YOU, Xuanhui HE, Junya LU, Yiqian XIE, Qiong LI, Shuang ZHU, Zhicai LUO. A composite drought index derived from a combination of GNSS PWV/vertical deformation and GRACE/GRACE-FO data [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1757-1768. |
| [2] | Gen LI, Hongzhou CHAI, Kaidi JIN, Zhao ZHAN. Underwater terrain matching method based on robust particle filter [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1841-1851. |
| [3] | KUANG Yingcai, Lü Zhiping, LI Linyang, WANG Fangchao, XU Guochang. Dynamic nolinear Gauss-Helmert model and its robust total Kalman filter algorithm for GNSS-acoustic underwater positioning [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(4): 559-570. |
| [4] | WANG Zeming, LI Haojun, SUN Yafeng. Robust estimation of GNSS-R tide level monitoring [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(2): 195-205. |
| [5] | SUN Yue, XUE Shuqiang, HAN Baomin, XIAO Zhen. Multi-station joint processing model for seafloor geodetic coordinate time series [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(11): 1835-1843. |
| [6] | LI Jiayuan, ZHANG Yongjun, AI Mingyao, HU Qingwu. Scale-adaptive Cauchy robust estimation based on progressive optimization and its applications [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(1): 61-70. |
| [7] | HAO Yushi, SUN Jianwei, SUI Xin, XU Aigong, SHI Chuang. Multi-GNSS RTK/INS tightly coupled integrated navigation method considering ISB/IFB estimation [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(11): 2265-2272. |
| [8] | YANG Gaochao, WANG Qing, YU Baoguo, LIU Pengfei, LI Shuang. High-precision indoor positioning based on robust LM visual inertial odometer and pseudosatellite [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(1): 18-30. |
| [9] | GUO Yinggang, LI Zongchun, HE Hua, WANG Zhiying. A simplex search algorithm for the optimal weight of common point of 3D coordinate transformation [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(8): 1004-1013. |
| [10] | BU Lijing, ZHENG Xinjie, ZHANG Zhengpeng. Super-resolution reconstruction of “straring” satellite video motion scene considering motion estimation error [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(2): 214-224. |
| [11] | YIN Xiao, CHAI Hongzhou, XIANG Minzhi, DU Zhenqiang. Robust UKF algorithm with motion constraint in BDS navigation [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(11): 1399-1406. |
| [12] | ZHAO Chaoying, WANG Baohang. SAR interferogram denoising based on robust covariance matrix decomposition [J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(1): 24-33. |
| [13] | YANG Xuexi, DENG Min, SHI Yan, TANG Jianbo, LIU Qiliang. A Nonparametric Test Method for Identifying Significant Cross-outliers in Spatial Point Dataset [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(9): 1250-1260. |
| [14] | FANG Xing, HUANG Lixiong, ZENG Wenxian, WU Yun. On an Improved Iterative Reweighted Least Squares Algorithm in Robust Estimation [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(10): 1301-1306. |
| [15] | JIAO Bo, HAO Jinming, LIU Weiping, ZHANG Hui, WEN Xufeng, SHI Yishuai. Estimation and Application of Single Difference FCB for Full Constellation Using One Reference Satellite [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(10): 1326-1336. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||