

Acta Geodaetica et Cartographica Sinica ›› 2024, Vol. 53 ›› Issue (6): 999-1012.doi: 10.11947/j.AGCS.2024.20230389
• Smart Surveying and Mapping • Previous Articles Next Articles
Li YAN1,2( ), Yinghao ZHAO3, Jicheng DAI1, Bo XU1, Hong XIE1,2(), Yuquan ZHOU1,2
), Yinghao ZHAO3, Jicheng DAI1, Bo XU1, Hong XIE1,2(), Yuquan ZHOU1,2
Received:2023-09-06
Published:2024-07-22
Contact:
Hong XIE
E-mail:lyan@sgg.whu.edu.cn;hxie@sgg.whu.edu.cn
About author:YAN Li (1966—), male, professor, PhD supervisor, majors in photogrammetry, remote sensing and LiDAR. E-mail: lyan@sgg.whu.edu.cn
Supported by:CLC Number:
Li YAN, Yinghao ZHAO, Jicheng DAI, Bo XU, Hong XIE, Yuquan ZHOU. Intelligent perception measurement technology of autonomous UAV for unknown environment[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 999-1012.
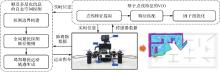
Fig.1
The autonomous UAV intelligent perception measurement technology and framework"
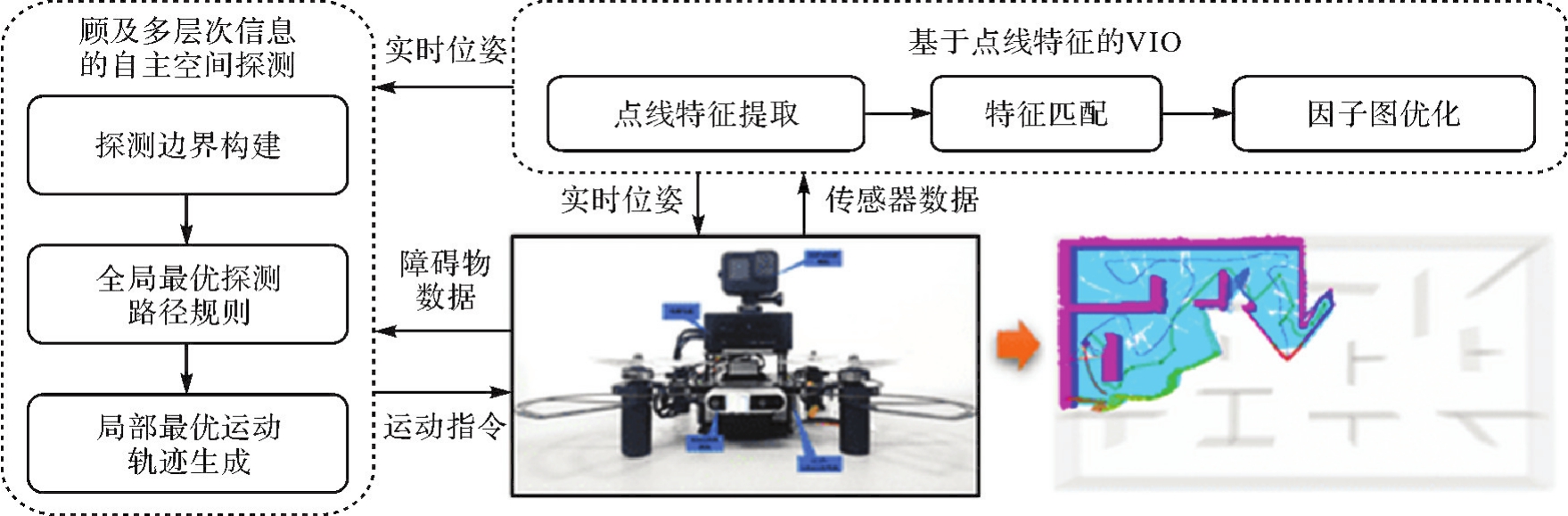

Fig.2
Overall framework of VIO algorithm based on point and line features"
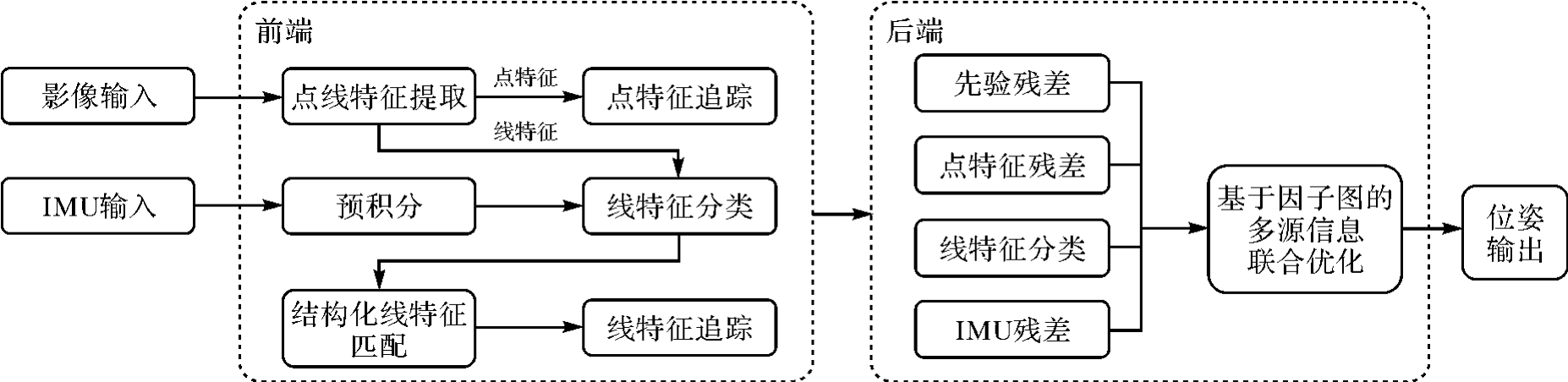

Fig.3
Comparison of linear feature extraction results before and after fusion based on LSD algorithm"

Fig.4
Example of linear feature matching results based on optical flow method"


Fig.5
The VIO system optimization model based on point and line features"

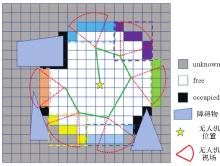
Fig.6
Global optimal exploration path planning"

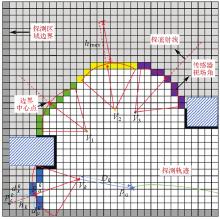
Fig.7
Evaluating the spatial features of frontiers"

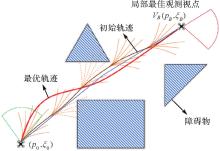
Fig.8
The trajectory searching and optimization"

Tab.1
Comparison results of different VIO algorithms trajectory translation RMSE error"
| 数据序列 | OKVIS-Mono | VINS-Mono | PL-VIO | PL-SLAM | 本文算法 |
|---|---|---|---|---|---|
| MH_01_easy | 29.5 | 14.8 | 20.1 | 15.7 | 11.1 |
| MH_02_easy | 30.7 | 17.1 | 13.1 | 14.2 | 9.3 |
| MH_03_medium | 33.4 | 19.4 | 26.1 | 14.7 | 15.7 |
| MH_04_difficult | 38.9 | 34.6 | 35.8 | 12.4 | 17.1 |
| MH_05_difficult | 46.7 | 29.2 | 24.4 | 55.5 | 14.4 |
| V1_02_medium | 22.2 | 7.9 | 17.0 | 16.9 | 8.9 |
| V1_03_difficult | 28.1 | 20.7 | 27.0 | 42.0 | 14.3 |
| V2_01_easy | 14.0 | 8.2 | 9.3 | 19.4 | 7.4 |
| V2_02_medium | 21.1 | 15.7 | 12.3 | 25.2 | 12.2 |
Tab.2
Comparison results of different VIO algorithms trajectory rotation RMSE error"
| 数据序列 | OKVIS-Mono | VINS-Mono | PL-VIO | PL-SLAM | 本文算法 |
|---|---|---|---|---|---|
| MH_01_easy | 3.2 | 2.0 | 1.6 | 6.0 | 1.6 |
| MH_02_easy | 3.9 | 2.3 | 1.7 | 2.5 | 0.9 |
| MH_03_medium | 3.3 | 1.6 | 1.7 | 3.4 | 0.8 |
| MH_04_difficult | 2.3 | 1.5 | 1.6 | 6.8 | 1.4 |
| MH_05_difficult | 2.4 | 0.7 | 1.1 | 9.9 | 0.7 |
| V1_02_medium | 6.0 | 2.6 | 3.2 | 5.6 | 1.5 |
| V1_03_difficult | 8.1 | 6.2 | 3.4 | 9.1 | 4.2 |
| V2_01_easy | 2.2 | 2.0 | 2.2 | 2.3 | 2.3 |
| V2_02_medium | 4.9 | 4.3 | 2.9 | 4.6 | 1.7 |

Fig.9
MH_05_difficult data sequence comparison results in terms of translation accuracy"
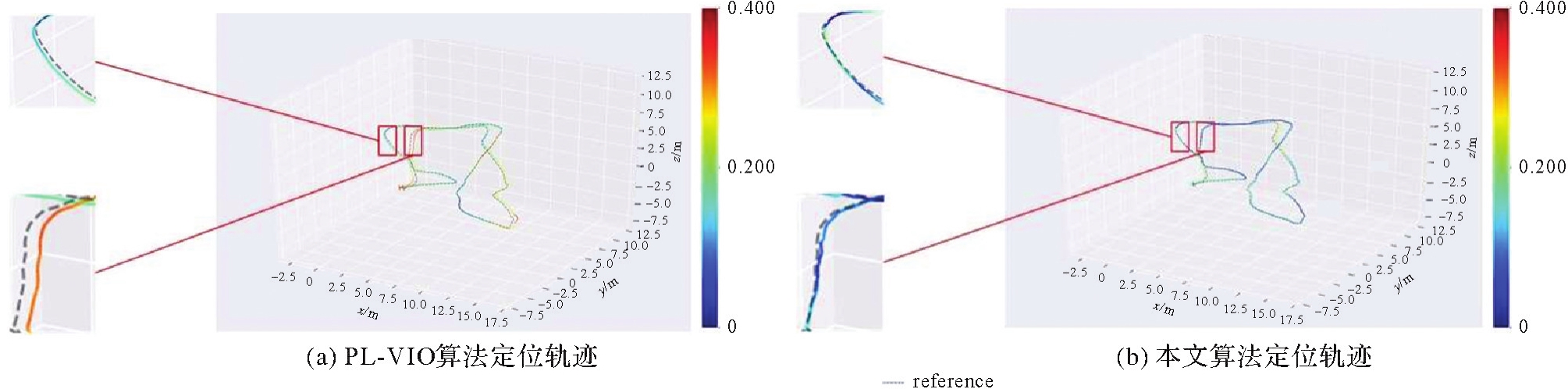
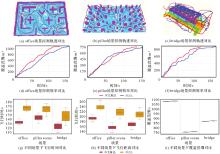
Fig.10
Comparison of exploration performance in different scenarios"

Tab.3
Experimental results of exploration performance in different scenarios"
| 场景 | 方法 | 探索耗时/s | 飞行距离/m | 覆盖范围/m3 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Avg | Min | Std | Avg | Min | Std | Avg | Min | Std | ||
| office | FUEL | 167.5 | 156.7 | 8.0 | 239.0 | 225.5 | 11.9 | 1 082.2 | 1 079.6 | 2.0 |
| 本文算法 | 133.2 | 127.4 | 4.3 | 193.8 | 177.9 | 8.2 | 1 077.7 | 1 075.5 | 2.0 | |
| pillar | FUEL | 163.6 | 147.0 | 9.1 | 215.8 | 189.7 | 14.8 | 756.8 | 753.0 | 1.8 |
| 本文算法 | 142.3 | 130.2 | 7.7 | 156.7 | 136.0 | 11.3 | 752.3 | 748.9 | 2.0 | |
| bridge | FUEL | 146.2 | 126.1 | 13.8 | 208.5 | 186.8 | 14.5 | 871.6 | 868.7 | 1.6 |
| 本文算法 | 122.4 | 109.8 | 7.3 | 167.7 | 146.7 | 10.6 | 867.4 | 865.4 | 1.6 | |

Fig.11
Autonomous UAV hardware platform"
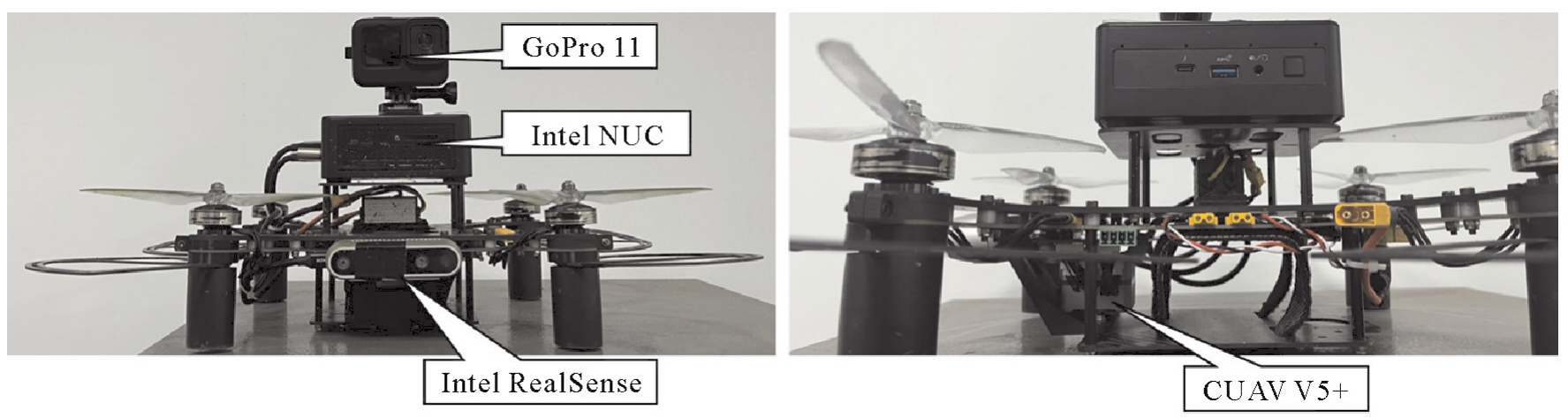
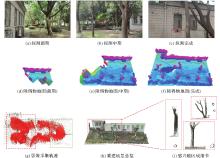
Fig.12
Autonomous perception process and reconstruction results of outdoor unknown scene"

| [1] | 陈军, 刘万增, 武昊, 等. 智能化测绘的基本问题与发展方向[J]. 测绘学报, 2021, 50(8):995-1005. DOI:10.11947/j.AGCS.2021.20210235. DOI:10.11947/j.AGCS.2021.20210235. |
| CHEN Jun, LIU Wanzeng, WU Hao, et al. Smart surveying and mapping: fundamental issues and research agenda[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(8):995-1005. DOI:10.11947/j.AGCS.2021.20210235. DOI:10.11947/j.AGCS.2021.20210235. | |
| [2] | 陈军, 武昊, 刘万增, 等. 自然资源时空信息的技术内涵与研究方向[J]. 测绘学报, 2022, 51(7):1130-1140. DOI:10.11947/j.AGCS.2022.20210643. |
| CHEN Jun, WU Hao, LIU Wanzeng, et al. Technical connotation and research agenda of natural resources spatio-temporal information[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(7):1130-1140. DOI:10.11947/j.AGCS.2022.20210643. | |
| [3] | CHEN Chen, LI Zhilin, LI Songnian, et al. From digitalized to intelligentized surveying and mapping: fundamental issues and research agenda[J]. Journal of Geodesy and Geoinformation Science, 2022, 5(2):148-160. |
| [4] | 郭庆华, 胡天宇, 刘瑾, 等. 轻小型无人机遥感及其行业应用进展[J]. 地理科学进展, 2021, 40(9):1550-1569. |
| GUO Qinghua, HU Tianyu, LIU Jin, et al. Advances in light weight unmanned aerial vehicle remote sensing and major industrial applications[J]. Progress in Geography, 2021, 40(9):1550-1569. | |
| [5] | 闫利, 陈宇, 谢洪, 等. 测量机器人的关键技术[J]. 测绘学报, 2021, 50(9):1159-1169. DOI:10.11947/j.AGCS.2021.20210090. |
| YAN Li, CHEN Yu, XIE Hong, et al. Surveying robot and its key technology[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(9):1159-1169. DOI:10.11947/j.AGCS.2021.20210090. | |
| [6] | HE Yijia, XU Bo, OUYANG Zhanpeng, et al. A rotation-translation-decoupled solution for robust and efficient visual-inertial initialization[C]//Proceedings of 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 739-748. |
| [7] | LIN H Y, ZHAN Jiarong. GNSS-denied UAV indoor navigation with UWB incorporated visual inertial odometry[J]. Measurement, 2023, 206:112256. |
| [8] | DUAN Ran, PAUDEL D P, FU Changhong, et al. Stereo orientation prior for UAV robust and accurate visual odometry[J]. ASME Transactions on Mechatronics, 2022, 27(5):3440-3450. |
| [9] | DI Kaichang, WAN Wenhui, ZHAO Hongying, et al. Progress and applications of visual SLAM[J]. Journal of Geodesy and Geoinformation Science, 2019, 2(2):38-49. |
| [10] | BARTOLOMEI L, TEIXEIRA L, CHLI M. Perception-aware path planning for UAVs using semantic segmentation[C]//Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 5808-5815. |
| [11] | LEE E M, CHOI J, LIM H, et al. REAL: rapid exploration with active loop-closing toward large-scale 3D mapping using UAVs[C]//Proceedings of 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems. [S.l.]: ACM Press, 2021: 4194-4198. |
| [12] | ZHOU Quan, REDDING C J, QI Hairong, et al. Agile path planning for radiation source searching with aerial drones[C]//Proceedings of 2021 IEEE Nuclear Science Symposium and Medical Imaging Conference. Piscataway: IEEE, 2021: 1-2. |
| [13] | QIN Tong, LI Peiliang, SHEN Shaojie. VINS-mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4):1004-1020. |
| [14] | STEENBEEK A, NEX F. CNN-based dense monocular visual SLAM for real-time UAV exploration in emergency conditions[J]. Drones, 2022, 6(3):79. |
| [15] | RHODES C, LIU Cunjia, CHEN Wenhua. Autonomous source term estimation in unknown environments: from a dual control concept to UAV deployment[J]. IEEE Robotics and Automation Letters, 2022, 7(2):2274-2281. |
| [16] | MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5):1255-1262. |
| [17] | CAMPOS C, ELVIRA R, RODRIGUEZ J J G, et al. ORB-SLAM3: an accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6):1874-1890. |
| [18] | SUN Ke, MOHTA K, PFROMMER B, et al. Robust stereo visual inertial odometry for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2018, 3(2):965-972. |
| [19] | SUMIKURA S, SHIBUYA M, SAKURADA K. OpenVSLAM: a versatile visual SLAM framework[C]//Proceedings of the 27th ACM International Conference on Multimedia. Nice: ACM Press, 2019: 2292-2295. |
| [20] | BLOESCH M, OMARI S, HUTTER M, et al. Robust visual inertial odometry using a direct EKF-based approach[C]//Proceedings of 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). [S.l.]: ACM Press, 2015: 298-304. |
| [21] | ROSINOL A, ABATE M, CHANG Yun, et al. Kimera: an open-source library for real-time metric-semantic localization and mapping[C]//Proceedings of 2020 IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 1689-1696. |
| [22] | 王晨捷, 罗斌, 李成源, 等. 无人机视觉SLAM协同建图与导航[J]. 测绘学报, 2020, 49(6):767-776. DOI:10.11947/j.AGCS.2020.20190145. |
| WANG Chenjie, LUO Bin, LI Chengyuan, et al. The collaborative mapping and navigation based on visual SLAM in UAV platform[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(6):767-776. DOI:10.11947/j.AGCS.2020.20190145. | |
| [23] | GOMEZ-OJEDA R, MORENO F A, ZUNIGA-NOEL D, et al. PL-SLAM: a stereo SLAM system through the combination of points and line segments[J]. IEEE Transactions on Robotics, 2019, 35(3):734-746. |
| [24] | GOMEZ-OJEDA R, BRIALES J, GONZALEZ-JIMENEZ J. PL-SVO: semi-direct monocular visual odometry by combining points and line segments[C]//Proceedings of 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). [S.l.]: ACM Press, 2016: 4211-4216. |
| [25] | ZHOU Lipu, WANG Shengze, KAESS M. DPLVO: direct point-line monocular visual odometry[J]. IEEE Robotics and Automation Letters, 2021, 6(4):7113-7120. |
| [26] | ZHAO Yinghao, YAN Li, DAI Jicheng, et al. Robust planning system for fast autonomous flight in complex unknown environment using sparse directed frontier points[J]. Drones, 2023, 7(3):219. |
| [27] | BIRCHER A, KAMEL M, ALEXIS K, et al. Receding horizon “next-best-view” planner for 3D exploration[C]//Proceedings of 2016 IEEE International Conference on Robotics and Automation (ICRA). Sweden: IEEE, 2016: 1462-1468. |
| [28] | WITTING C, FEHR M, BEHNEMANN R, et al. History-aware autonomous exploration in confined environments using MAVs[C]//Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid: IEEE, 2018: 1-9. |
| [29] | SELIN M, TIGER M, DUBERG D, et al. Efficient autonomous exploration planning of large-scale 3D environments[J]. IEEE Robotics and Automation Letters, 2019, 4(2):1699-1706. |
| [30] | WANG Chaoqun, ZHU Delong, LI Teng, et al. Efficient autonomous robotic exploration with semantic road map in indoor environments[J]. IEEE Robotics and Automation Letters, 2019, 4(3):2989-2996. |
| [31] | BATINOVIC A, IVANOVIC A, PETROVIC T, et al. A shadow casting-based next-best-view planner for autonomous 3D exploration[J]. IEEE Robotics and Automation Letters, 2022, 7(2):2969-2976. |
| [32] | DUBERG D, JENSFELT P. UFOExplorer: fast and scalable sampling-based exploration with a graph-based planning structure[J]. IEEE Robotics and Automation Letters, 2022, 7(2):2487-2494. |
| [33] | NAAZARE M, ROSAS F G, SCHULZ D. Online next-best-view planner for 3D-exploration and inspection with a mobile manipulator robot[J]. IEEE Robotics and Automation Letters, 2022, 7(2):3779-3786. |
| [34] | RESPALL V M, DEVITT D, FEDORENKO R, et al. Fast sampling-based next-best-view exploration algorithm for a MAV[C]//Proceedings of 2021 IEEE International Conference on Robotics and Automation. Xi'an: IEEE, 2021: 89-95. |
| [35] | YAMAUCHI B. A frontier-based approach for autonomous exploration[C]//Proceedings of 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation. Monterey: IEEE, 1997. |
| [36] | ZHOU Boyu, ZHANG Yichen, CHEN Xinyi, et al. FUEL: fast UAV exploration using incremental frontier structure and hierarchical planning[J]. IEEE Robotics and Automation Letters, 2021, 6(2):779-786. |
| [37] | CIESLEWSKI T, KAUFMANN E, SCARAMUZZA D. Rapid exploration with multi-rotors: a frontier selection method for high speed flight[C]//Proceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. [S.l.]: ACM Press, 2017: 2135-2142. |
| [38] | SHI Jianbo, TOMAS I. Good features to track[C]//Proceedings of 1994 IEEE Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 1994: 593-600. |
| [39] | BAKER S, MATTHEWS I. Lucas-kanade 20 years on: a unifying framework[J]. International Journal of Computer Vision, 2004, 56(3):221-255. |
| [40] | ZHANG Lilian, KOCH R. An efficient and robust line segment matching approach based on LBD descriptor and pairwise geometric consistency[J]. Journal of Visual Communication and Image Representation, 2013, 24(7):794-805. |
| [41] | ELFES A. Using occupancy grids for mobile robot perception and navigation[J]. Computer, 1989, 22(6):46-57. |
| [42] | ZHOU Boyu, ZHANG Yichen, CHEN Xinyi, et al. FUEL: fast UAV exploration using incremental frontier structure and hierarchical planning[J]. IEEE Robotics and Automation Letters, 2021, 6(2):779-786. |
| [43] | ZHOU Xin, WANG Zhepei, YE Hongkai, et al. EGO-planner: an ESDF-free gradient-based local planner for quadrotors[J]. IEEE Robotics and Automation Letters, 2021, 6(2):478-485. |
| [44] | WANG Zhepei, ZHOU Xin, XU Chao, et al. Geometrically constrained trajectory optimization for multicopters[J]. IEEE Transactions on Robotics, 2022, 38(5):3259-3278. |
| [45] | REN Yunfan, ZHU Fangcheng, LIU Wenyi, et al. Bubble planner: planning high-speed smooth quadrotor trajectories using receding corridors[C]//Proceedings of 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems. Kyoto: IEEE, 2022: 6332-6339. |
| [46] | ZHAO Yinghao, YAN Li, CHEN Yu, et al. Robust and efficient trajectory replanning based on guiding path for quadrotor fast autonomous flight[J]. Remote Sensing, 2021, 13(5):972. |
| [47] | ZHOU Boyu, GAO Fei, WANG Luqi, et al. Robust and efficient quadrotor trajectory generation for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2019, 4(4):3529-3536. |
| [48] | BURRI M, NIKOLIC J, GOHL P, et al. The EuRoC micro aerial vehicle datasets[J]. International Journal of Robotics Research, 2016, 35(10):1157-1163. |
| [49] | LEUTENEGGER S, FURGALE P, RABAUD V, et al. Key frame-based visual-inertial SLAM using nonlinear optimization[C]//Proceedings of 2013 Science and Systems IX. Robotics: Science and Systems Foundation, 2013. |
| [50] | HE Y, ZHAO J, GUO Y, et al. PL-VIO: tightly-coupled monocular visual-inertial odometry using point and line features[J]. Sensors (Basel), 2018, 18(4):E1159. |
| [51] | SCHÖNBERGER J L, ZHENG Enliang, FRAHM J M, et al. Pixelwise view selection for unstructured multi-view stereo[C]//Proceedings of 2016 Computer Vision. Cham: Springer, 2016: 501-518. |
| [1] | Kefan SHAO, Zengke LI, Meng SUN, Zhenbin LIU, Qi WU. A geomagnetic SLAM method enhanced by multi-source data fusion based on smartphones [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1812-1825. |
| [2] | Weitong WU, Chi CHEN, Bisheng YANG, Xiufeng HE. Robust multi-sensor fusion-based odometry method of LiDAR, millimeter-wave radar and IMU in degraded scenes [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(9): 1677-1686. |
| [3] | Jiayin LIU, Jiatian LI, Guokun CHEN, Xiaohui A, Jingjing WEI, Hao HU. A Markov model for estimating camera pose using target changes [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(6): 1071-1081. |
| [4] | Xin JIA, Qing ZHU, Xuming GE, Ruifeng MA, Han HU. Parametric modeling and deformation identification of highway guardrail driven by MLS point clouds [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(4): 688-701. |
| [5] | Luguang LAI, Dongqing ZHAO, Linyang LI, Wenzhe FAN, Xiongqing LI, Pengfei LI. A thermal-inertial odometry with point and line fusion for the weak textured dark scenes [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(3): 448-460. |
| [6] | Xiaohu LIN, Xin YANG, Wanqiang YAO, Hongwei MA, Bolin MA, Xiongwei MA. A dynamic weighted fusion SLAM method using multi-source sensor data in complex underground spaces [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(3): 523-535. |
| [7] | Qingzhou MAO, Mengxuan XIA, Qingquan LI, Jing ZHU, Tingli FAN. Global registration method for multi-station point clouds based on the bundle adjustment method [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(9): 1663-1670. |
| [8] | Dan ZHANG, Weifeng WANG, Guiping HUANG, Xinping WANG, Yanrong LIU, Zhanghong ZHAO. Measurement field error analysis and on site evaluation method for binocular stereo industrial photogrammetry system [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(9): 1725-1736. |
| [9] | KANG Junhua. End-to-end dense stereo matching based on full convolutional neural network [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(5): 785-785. |
| [10] | LI Jiatian, WANG Congcong, A Xiaohui, YAN Ling, ZHU Zhihao, GAO Peng. Method of close-range space intersection combining multi-image forward intersection with single hidden layer neural network [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(6): 736-745. |
| [11] | YAN Li, DAI Jicheng, TAN Junxiang, LIU Hua, CHEN Changjun. Global fine registration of point cloud in LiDAR SLAM based on pose graph [J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(3): 313-321. |
| [12] | ZHANG Chunsen, ZHANG Mengmeng, GUO Bingxuan. Refinement of the 3D Mesh Model Driven by the Image Information [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(7): 959-967. |
| [13] | YAN Li, TAN Junxiang, LIU Hua, CHEN Changjun. Registration of TLS and MLS Point Cloud Combining Genetic Algorithm with ICP [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(4): 528-536. |
| [14] | ZHANG Fan, HUANG Yin, HUANG Xianfeng, XU Siqi. 3D Laser Scanning Assisted by Ordinary Plane Mirror for Non-direct Viewing Area [J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(12): 1950-1958. |
| [15] | DENG Fei, WU Yousi, HU Yulei, CUI Hongxia. Position and Pose Estimation of Spherical Panoramic Image with Improved EPnP Algorithm [J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(6): 677-684. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||