


测绘学报 ›› 2025, Vol. 54 ›› Issue (2): 297-307.doi: 10.11947/j.AGCS.2025.20240018
张星1,2,3,4( ), 黄展鹏1,2,3,4, 李清泉2,3,4,5, 周宝定2,5(), 李麒沛1,2,3,4
), 黄展鹏1,2,3,4, 李清泉2,3,4,5, 周宝定2,5(), 李麒沛1,2,3,4
收稿日期:2024-01-12
出版日期:2025-03-11
发布日期:2025-03-11
通讯作者:
周宝定
E-mail:xzhang@szu.edu.cn;bdzhou@szu.edu.cn
作者简介:张星(1982—),男,博士,副教授,研究方向为多传感器融合定位与三维建图。 E-mail:xzhang@szu.edu.cn
基金资助:
Xing ZHANG1,2,3,4(), Zhanpeng HUANG1,2,3,4, Qingquan LI2,3,4,5, Baoding ZHOU2,5(), Qipei LI1,2,3,4
Received:2024-01-12
Online:2025-03-11
Published:2025-03-11
Contact:
Baoding ZHOU
E-mail:xzhang@szu.edu.cn;bdzhou@szu.edu.cn
About author:ZHANG Xing (1982—), male, PhD, associate professor, majors in multi-sensor fusion positioning and 3D mapping. E-mail: xzhang@szu.edu.cn
Supported by:摘要:
三维地图对于隧道的施工安全预警和长期安全维护至关重要。然而,在纹理缺乏、结构粗糙且存在动态干扰的隧道环境中,生成准确的三维点云地图是一项具有挑战性的任务。本文提出了一种隧道三维建图方法,用于构建超长且高噪声隧道场景的点云地图。首先,提出了一种配准残差补偿模型,以减少由粗糙表面结构引起的配准误差。该模型利用K均值聚类算法识别非平整表面结构,并通过局部区域残差进行有效补偿。然后,提出了一种基于视场最大化的空间约束模型,以排除绝对测量偏差造成的点云误差。为了验证本方法的性能,本文在钻爆法和盾构法隧道的二次衬砌和管沟敷设阶段进行了试验。结果表明,该方法较主流建图算法FAST-LIO2、Faster-LIO和LiLi-OM具有更准确的轨迹估计和地图构建。此外,本文进行了一些消融试验,以进一步阐明不同模型在隧道三维建图中的作用。
中图分类号:
张星, 黄展鹏, 李清泉, 周宝定, 李麒沛. 结合配准补偿和空间约束的隧道三维建图方法[J]. 测绘学报, 2025, 54(2): 297-307.
Xing ZHANG, Zhanpeng HUANG, Qingquan LI, Baoding ZHOU, Qipei LI. 3D tunnel mapping method combining registration compensation and spatial constraint[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(2): 297-307.
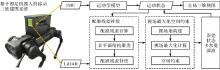
图1
隧道三维建图框架"
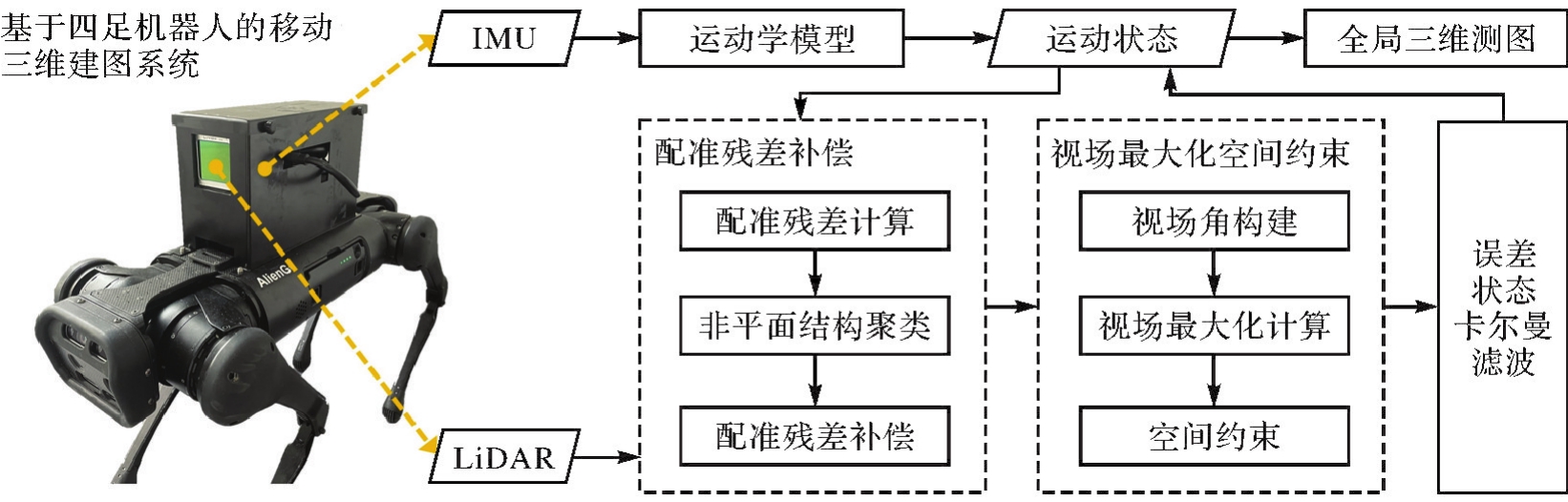
图2
真实曲面(灰色)、相邻点的拟合平面(虚线)和点的残差值r"
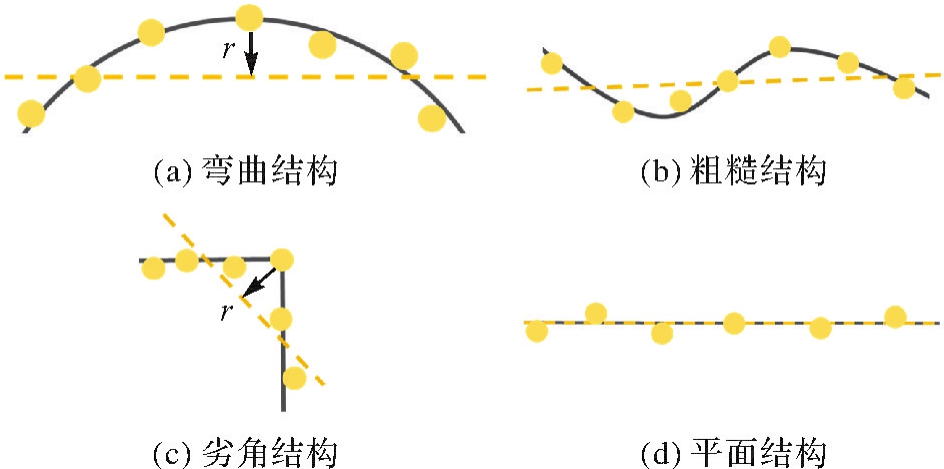
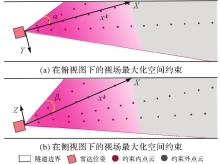
图3
在俯视图和侧视图下的视场最大化空间约束"
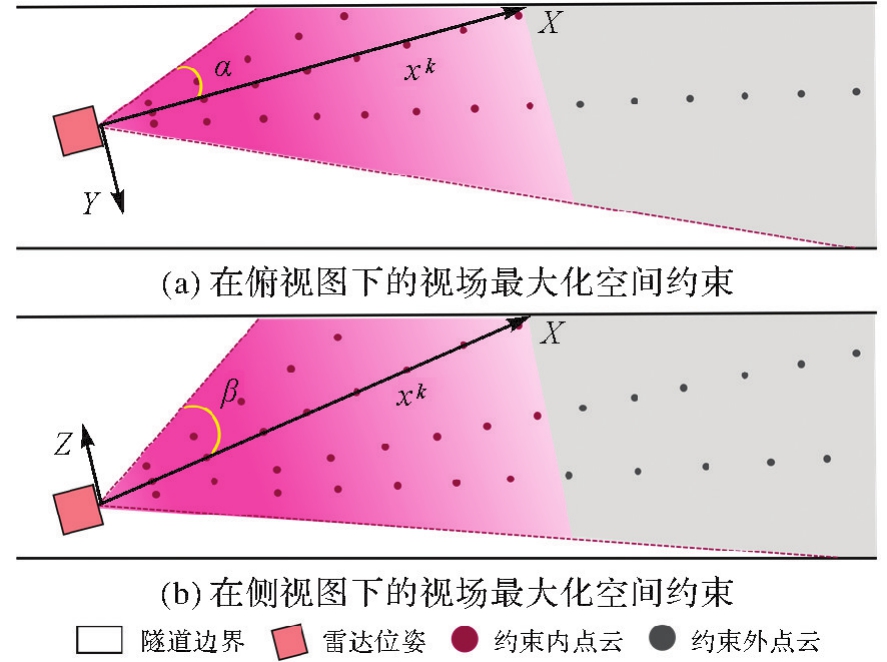
图4
试验场景示例"

表1
3个数据集的描述"
| 数据集 | 施工阶段 | 长度/m | 激光雷达点数量 | 扫描帧数量 | |||
|---|---|---|---|---|---|---|---|
| FAST-LIO2 | Faster-LIO | LiLi-OM | 本文方法 | ||||
| Tunnel-P | 管沟敷设 | 123.2 | 1 121.9×104 | 1 122.3×104 | 152.0×104 | 1 114.3×104 | 1451 |
| Tunnel-C | 二次衬砌 | 129.0 | 905.1×104 | 905.4×104 | 124.7×104 | 904.9×104 | 1224 |
| Tunnel-T | 管沟敷设 | 101.8 | 1 535.9×104 | 1 535.6×104 | 182.0×104 | 1 448.3×104 | 1767 |

图5
Tunnel-C和Tunnel-T数据集的轨迹闭合图及在XY平面和三轴分量上的详细结果"

表2
轨迹闭合和建图结果对比"
| 方法 | Tunnel-C | Tunnel-T | Tunnel-P | |||
|---|---|---|---|---|---|---|
| CE/m | CE/m | AME/m | RME/(%) | AME/m | RME/(%) | |
| FAST-LIO2 | 0.90 | 0.20 | 0.07 | 1.90 | 0.06 | 1.09 |
| Faster-LIO | 0.59 | 2.04 | 0.27 | 7.38 | 0.12 | 2.06 |
| LiLi-OM | 1.81 | — | — | 1.64 | 28.50 | |
| 本文方法 | 0.01 | 0.03 | 0.02 | 0.49 | 0.02 | 0.26 |

图6
在Tunnel-P数据集中隧道建图结果"
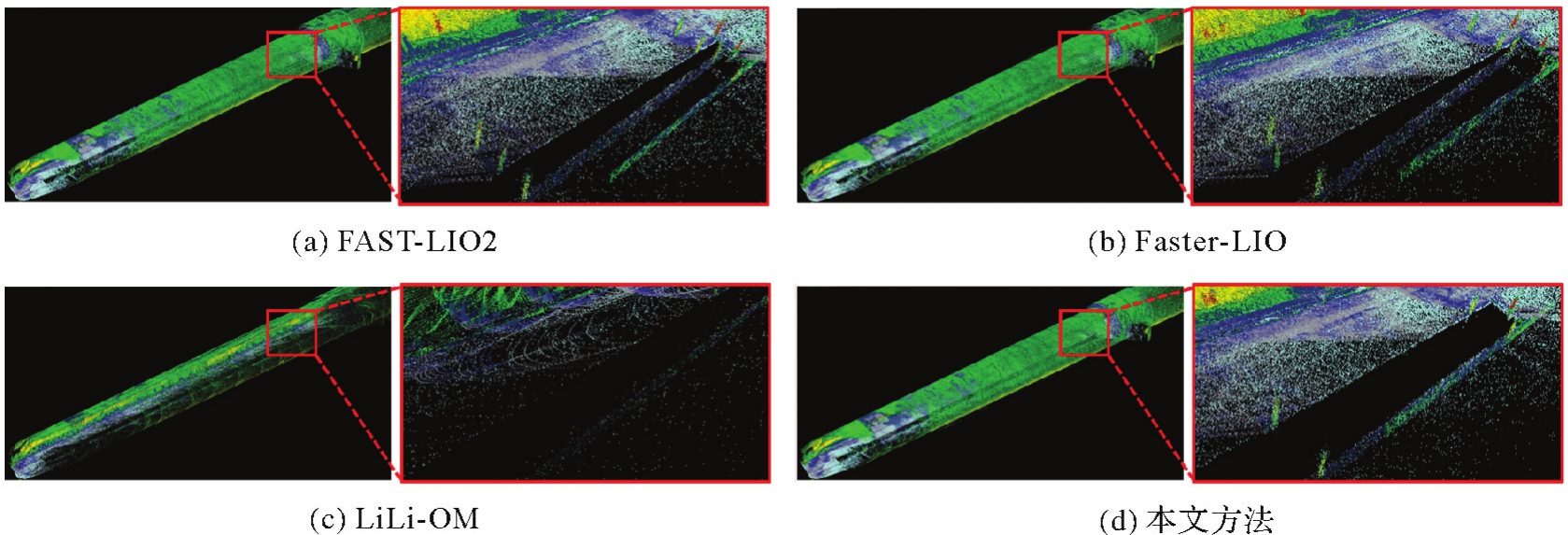
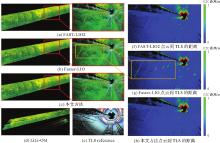
图7
在Tunnel-T数据集上的隧道建图结果"
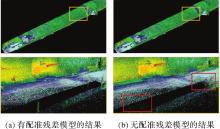
图8
在Tunnel-P数据集中有无残差补偿结果对比"
表3
消融试验结果对比"
| 方法 | Tunnel-C | Tunnel-T | Tunnel-P | 计算时间/s | |||
|---|---|---|---|---|---|---|---|
| CE/m | CE/m | AME/m | RME/(%) | AME/m | RME/(%) | ||
| 残差补偿+无空间约束 | 0.56 | 0.19 | 0.06 | 1.57 | 0.07 | 1.17 | 0.012 |
| 无残差补偿+空间约束 | 0.84 | 0.30 | 0.21 | 5.94 | 0.44 | 7.62 | 0.013 |
| 无残差补偿+无空间约束 | 1.04 | 0.51 | 0.39 | 10.76 | 0.57 | 10.03 | 0.012 |
| 残差补偿+空间约束(本文方法) | 0.01 | 0.03 | 0.02 | 0.49 | 0.02 | 0.26 | 0.012 |
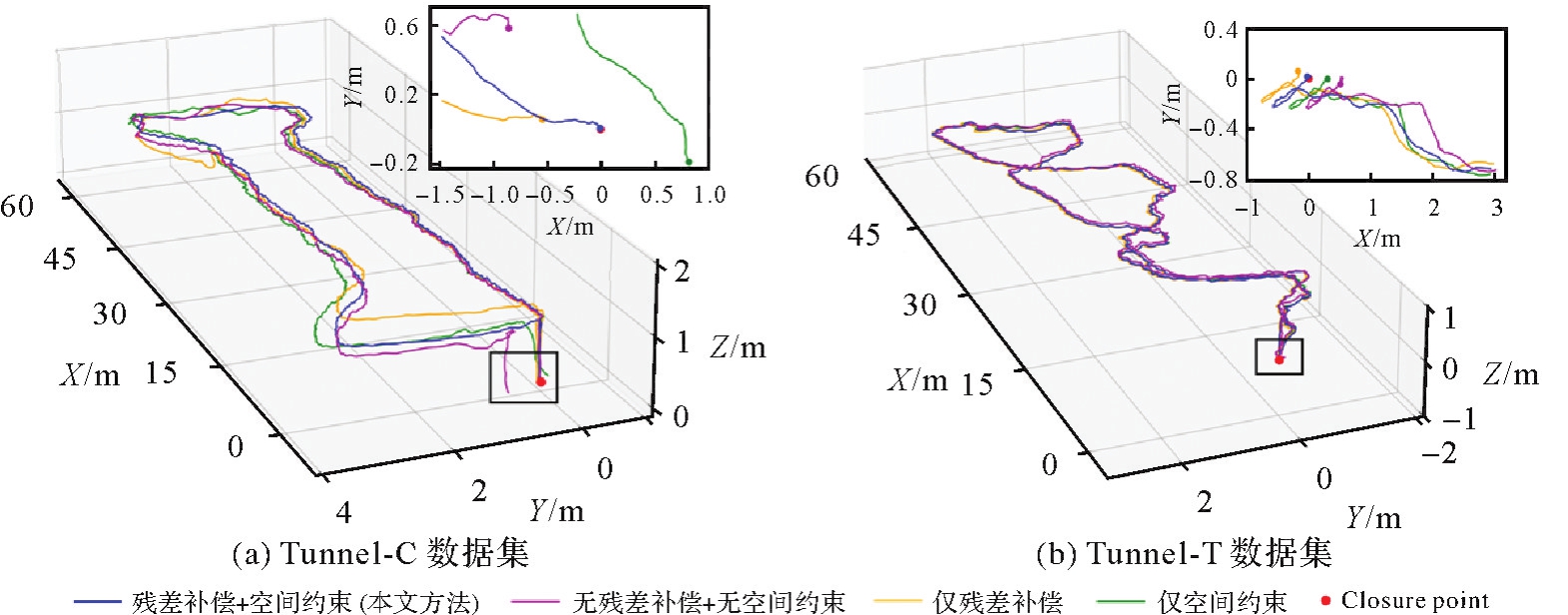
图9
在Tunnel-C和Tunnel-T数据集中不同方法的轨迹闭合图和在XY平面上的详细结果"
| [1] | LU Chunfang, CAI Chaoxun. Challenges and countermeasures for construction safety during the Sichuan-Tibet railway project[J]. Engineering, 2019, 5(5): 833-838. |
| [2] | WANG Qi, QIN Qian, JIANG Bei, et al. Mechanized construction of fabricated arches for large-diameter tunnels[J]. Automation in Construction, 2021, 124: 103583. |
| [3] | 吴波, 朱林萍, 李扬波, 等. 基于K-means聚类模型的隧道施工安全风险评价方法及应用研究[J]. 重庆交通大学学报(自然科学版), 2023, 42(11): 80-87. |
| WU Bo, ZHU Linping, LI Yangbo, et al. Evaluation method and application of tunnel construction safety risk based on K-means clustering model[J]. Journal of Chongqing Jiaotong University (Natural Science), 2023, 42(11): 80-87. | |
| [4] | SOUSA R L, EINSTEIN H H. Lessons from accidents during tunnel construction[J]. Tunnelling and Underground Space Technology, 2021, 113: 103916. |
| [5] | YE Zijian, YE Ying, ZHANG Chenping, et al. A digital twin approach for tunnel construction safety early warning and management[J]. Computers in Industry, 2023, 144: 103783. |
| [6] | INSA-IGLESIAS M, JENKINS M D, MORISON G. 3D visual inspection system framework for structural condition monitoring and analysis[J]. Automation in Construction, 2021, 128: 103755. |
| [7] | LIU Wenli, WU Xianguo, ZHANG Limao, et al. Sensitivity analysis of structural health risk in operational tunnels[J]. Automation in Construction, 2018, 94: 135-153. |
| [8] |
李珵, 卢小平, 朱宁宁, 等. 基于激光点云的隧道断面连续提取与形变分析方法[J]. 测绘学报, 2015, 44(9): 1056-1062. DOI:.
doi: 10.11947/j.AGCS.2015.20140632 |
|
LI Cheng, LU Xiaoping, ZHU Ningning, et al. Continuously extracting section and deformation analysis for subway tunnel based on LiDAR points[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(9): 1056-1062. DOI:.
doi: 10.11947/j.AGCS.2015.20140632 |
|
| [9] | SHEN Yueqian, WANG Jinguo, WANG Jinhu, et al. Methodology for extraction of tunnel cross-sections using dense point cloud data[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(2): 56-71. |
| [10] |
李帅鑫, 李九人, 田滨, 等. 面向点云退化的隧道环境的无人车激光SLAM方法[J]. 测绘学报, 2021, 50(11): 1487-1499. DOI:.
doi: 10.11947/j.AGCS.2021.20210248 |
|
LI Shuaixin, LI Jiuren, TIAN Bin, et al. A laser SLAM method for unmanned vehicles in point cloud degenerated tunnel environments[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1487-1499. DOI:.
doi: 10.11947/j.AGCS.2021.20210248 |
|
| [11] | GONG Z, LI J, LUO Z P, et al. Mapping and semantic modeling of underground parking lots using a backpack LiDAR system[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(2): 734-746. |
| [12] | JIAO Jianhao, YE Haoyang, ZHU Yilong, et al. Robust odometry and mapping for multi-LiDAR systems with online extrinsic calibration[J]. IEEE Transactions on Robotics, 2023, 38(1): 351-371. |
| [13] |
闫利, 戴集成, 谭骏祥, 等. SLAM激光点云整体精配准位姿图技术[J]. 测绘学报, 2019, 48(3): 313-321. DOI:.
doi: 10.11947/j.AGCS.2019.20170716 |
|
YAN Li, DAI Jicheng, TAN Junxiang, et al. Global fine registration of point cloud in LiDAR SLAM based on pose graph[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(3): 313-321. DOI:.
doi: 10.11947/j.AGCS.2019.20170716 |
|
| [14] | KOCER B B, TJAHJOWIDODO T, PRATAMA M, et al. Inspection-while-flying: an autonomous contact-based nondestructive test using UAV-tools[J]. Automation in Construction, 2019, 106: 102895. |
| [15] |
王晨捷, 罗斌, 李成源, 等. 无人机视觉SLAM协同建图与导航[J]. 测绘学报, 2020, 49(6): 767-776. DOI:.
doi: 10.11947/j.AGCS.2020.20190145 |
|
WANG Chenjie, LUO Bin, LI Chengyuan, et al. The collaborative mapping and navigation based on visual SLAM in UAV platform[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(6): 767-776. DOI:.
doi: 10.11947/j.AGCS.2020.20190145 |
|
| [16] | ASADI K, SURESH A K, ENDER A, et al. An integrated UGV-UAV system for construction site data collection[J]. Automation in Construction, 2020, 112: 103068. |
| [17] |
周哲, 胡钊政, 李娜, 等. 面向智能车的地下停车场环视特征地图构建与定位[J]. 测绘学报, 2021, 50(11): 1574-1584. DOI:.
doi: 10.11947/j.AGCS.2021.20210205 |
|
ZHOU Zhe, HU Zhaozheng, LI Na, et al. Visual map from around view system for intelligent vehicle localization in underground parking lots[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1574-1584. DOI:.
doi: 10.11947/j.AGCS.2021.20210205 |
|
| [18] | ZHOU Baoding, MO Haoquan, TANG Shengjun, et al. Backpack LiDAR-based SLAM with multiple ground constraints for multistory indoor mapping[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 1-16. |
| [19] | VATANDAŞLAR C, ZEYBEK M. Extraction of forest inventory parameters using handheld mobile laser scanning: a case study from Trabzon, Turkey[J]. Measurement, 2021, 177: 109328. |
| [20] | GONÇALVES J A, HENRIQUES R. UAV photogrammetry for topographic monitoring of coastal areas[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 104: 101-111. |
| [21] |
孟德将, 田滨, 蔡峰, 等. 面向无人驾驶矿车的露天矿山道路坡度实时检测方法[J]. 测绘学报, 2021, 50(11): 1628-1638. DOI:.
doi: 10.11947/j.AGCS.2021.2021024 |
|
MENG Dejiang, TIAN Bin, CAI Feng, et al. Road slope real-time detection for unmanned truck in surface mine[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1628-1638. DOI:.
doi: 10.11947/j.AGCS.2021.2021024 |
|
| [22] | YU Fangwen, WU Yujie, MA Songchen, et al. Brain-inspired multimodal hybrid neural network for robot place recognition[J]. Science Robotics, 2023, 8(78): abm6996. |
| [23] | HU D F, GAN V J L, YIN C. Robot-assisted mobile scanning for automated 3D reconstruction and point cloud semantic segmentation of building interiors[J]. Automation in construction, 2023, 152: 104949. |
| [24] | PARK J, CHO Y, SHIN Y S. Nonparametric background model-based LiDAR SLAM in highly dynamic urban environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 24190-24205. |
| [25] | KIM G, KIM A. Remove, then revert: static point cloud map construction using multiresolution range images[C]//Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 10758-10765. |
| [26] | LIM H, HWANG S, MYUNG H. ERASOR: egocentric ratio of pseudo occupancy-based dynamic object removal for static 3D point cloud map building[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 2272-2279.. |
| [27] | YOON D, TANG T, BARFOOT T. Mapless online detection of dynamic objects in 3D LiDAR[C]//Proceedings of 2019 Conference on Computer and Robot Vision. Kingston: IEEE, 2019: 29-31. |
| [28] | CHEN X Y L, LI S J, MERSCH B, et al. Moving object segmentation in 3D LiDAR data: a learning-based approach exploiting sequential data[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 6529-6536. |
| [29] | CHEN X Y L, MILIOTO A, PALAZZOLO E, et al. SuMa++: efficient LiDAR-based semantic SLAM[C]//Proceedings of 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems. Macau: IEEE, 2019: 4530-4537. |
| [30] | TAO Zhongxing, XUE Jianru, WANG Di, et al. An adaptive invariant EKF for map-aided localization using 3D point cloud[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 24057-24070. |
| [31] | XU Wei, CAI Yixi, HE Dongjiao, et al. FAST-LIO2: fast direct LiDAR-inertial odometry[J]. IEEE Transactions on Robotics, 2022, 38(4): 2053-2073. |
| [32] | EO Y, PYEON M, KIM S, et al. Coregistration of terrestrial LiDAR points by adaptive scale-invariant feature transformation with constrained geometry[J]. Automation in construction, 2012, 25: 49-58. |
| [33] | SOFONIA J J, PHINN S, ROELFSEMA C, et al. Modelling the effects of fundamental UAV flight parameters on LiDAR point clouds to facilitate objectives-based planning[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 149: 105-118. |
| [34] | HU Han, DING Yulin, ZHU Qing, et al. An adaptive surface filter for airborne laser scanning point clouds by means of regularization and bending energy[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 92: 98-111. |
| [35] | CHEN Honghua, WEI Zeyong, LI Xianzhi, et al. RePCD-net: feature-aware recurrent point cloud denoising network[J]. International Journal of Computer Vision, 2022, 130(3): 615-629. |
| [36] | DE SILVA EDIRIMUNI D, LU Xuequan, SHAO Zhiwen, et al. IterativePFN: true iterative point cloud filtering[C]//Proceedings of 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 13530-13539. |
| [37] | LU Dening, LU Xuequan, SUN Yangxing, et al. Deep feature-preserving normal estimation for point cloud filtering[J]. Computer-Aided Design, 2020, 125: 102860. |
| [38] | PISTILLI F, FRACASTORO G, VALSESIA D, et al. Learning robust graph-convolutional representations for point cloud denoising[J]. IEEE Journal of Selected Topics in Signal Processing, 2021, 15(2): 402-414. |
| [39] | GAO Jianlan, CHEN Yiping, JUNIOR J M, et al. Rapid extraction of urban road guardrails from mobile LiDAR point clouds[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 1572-1577. |
| [40] | BAI Chunge, XIAO Tao, CHEN Yajie, et al. Faster-LIO: lightweight tightly coupled LiDAR-inertial odometry using parallel sparse incremental voxels[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4861-4868. |
| [41] | LI Kailai, LI Meng, HANEBECK U D. Towards high-performance solid-state-LiDAR-inertial odometry and mapping[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 5167-5174. |
| [1] | 吴唯同, 陈驰, 杨必胜, 何秀凤. 退化场景稳健的激光雷达、毫米波雷达与惯性融合里程计方法[J]. 测绘学报, 2025, 54(9): 1677-1686. |
| [2] | 普东东, 柴洪洲, 欧阳永忠, 董超. 机载激光雷达测深相邻条带拼接分层加密匹配算法[J]. 测绘学报, 2025, 54(8): 1439-1451. |
| [3] | 张正华, 陈国良. 一种轻量且旋转不变的激光雷达位置识别网络[J]. 测绘学报, 2025, 54(1): 90-103. |
| [4] | 徐涛, 杨元维, 高贤君, 王志威, 潘越, 李少华, 许磊, 王艳军, 刘波, 余静, 吴凤敏, 孙浩宇. 融合图卷积与多尺度特征的接触网点云语义分割[J]. 测绘学报, 2024, 53(8): 1624-1633. |
| [5] | 王丽英, 张康丽, 李鑫奥, 有泽, 丰勇. 自适应局部空谱一致下的机载LiDAR数据建筑物提取算法[J]. 测绘学报, 2024, 53(12): 2349-2360. |
| [6] | 钱闯, 张红娟, 李文卓, 刘晖, 李必军. LiDAR标签和栅格占有图结合的LiDAR/IMU空间标定方法[J]. 测绘学报, 2023, 52(9): 1469-1479. |
| [7] | 韦春桃, 龚成, 周永绪. 一种联合空间约束与差异特征聚合的变化检测网络[J]. 测绘学报, 2023, 52(9): 1538-1547. |
| [8] | 王丽英, 吴际, 有泽, 李玉, CAMARA Mahamadou. 多维GMM与邻域约束的多光谱机载LiDAR数据城市地物分类[J]. 测绘学报, 2023, 52(3): 419-431. |
| [9] | 王铉彬, 李星星, 廖健驰, 冯绍权, 李圣雨, 周宇轩. 基于图优化的紧耦合双目视觉/惯性/激光雷达SLAM方法[J]. 测绘学报, 2022, 51(8): 1744-1756. |
| [10] | 单杰, 田祥希, 李爽, 李韧菲. 星载激光测高技术进展[J]. 测绘学报, 2022, 51(6): 964-982. |
| [11] | 许强, 郭晨, 董秀军. 地质灾害航空遥感技术应用现状及展望[J]. 测绘学报, 2022, 51(10): 2020-2033. |
| [12] | 闫利, 陈宇, 谢洪, 戴集成, 赵英豪, 胡啸, 李瑶, 赵玏洋, 王月琴. 测量机器人的关键技术[J]. 测绘学报, 2021, 50(9): 1159-1169. |
| [13] | 孟德将, 田滨, 蔡峰, 高义军, 陈龙. 面向无人驾驶矿车的露天矿山道路坡度实时检测方法[J]. 测绘学报, 2021, 50(11): 1628-1638. |
| [14] | 邓晨, 李宏伟, 张斌, 许智宾, 肖志远. 基于深度学习的语义SLAM关键帧图像处理[J]. 测绘学报, 2021, 50(11): 1605-1616. |
| [15] | 史鹏程, 叶勤, 张绍明, 邓海峰. 顾及室内场景特征的多线激光雷达初始定位[J]. 测绘学报, 2021, 50(11): 1594-1604. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||