

Acta Geodaetica et Cartographica Sinica ›› 2024, Vol. 53 ›› Issue (5): 946-958.doi: 10.11947/j.AGCS.2024.20230335
• Photogrammetry and Remote Sensing • Previous Articles Next Articles
San JIANG1,2,3( ), Yichen MA1, Qingquan LI2, Wanshou JIANG4, Bingxuan GUO4, Lizhe WANG1()
), Yichen MA1, Qingquan LI2, Wanshou JIANG4, Bingxuan GUO4, Lizhe WANG1()
Received:2023-08-11
Revised:2024-02-20
Published:2024-06-19
Contact:
Lizhe WANG
E-mail:jiangsan@cug.edu.cn;lzwang@cug.edu.cn
About author:JIANG San (1987—), male, PhD, associate professor, majors in multi-source image matching and 3D reconstruction. E-mail: jiangsan@cug.edu.cn
Supported by:CLC Number:
San JIANG, Yichen MA, Qingquan LI, Wanshou JIANG, Bingxuan GUO, Lizhe WANG. Parallel SfM-based 3D reconstruction for unordered UAV images[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(5): 946-958.

Fig. 1
The flowchart of parallel SfM for UAV images"
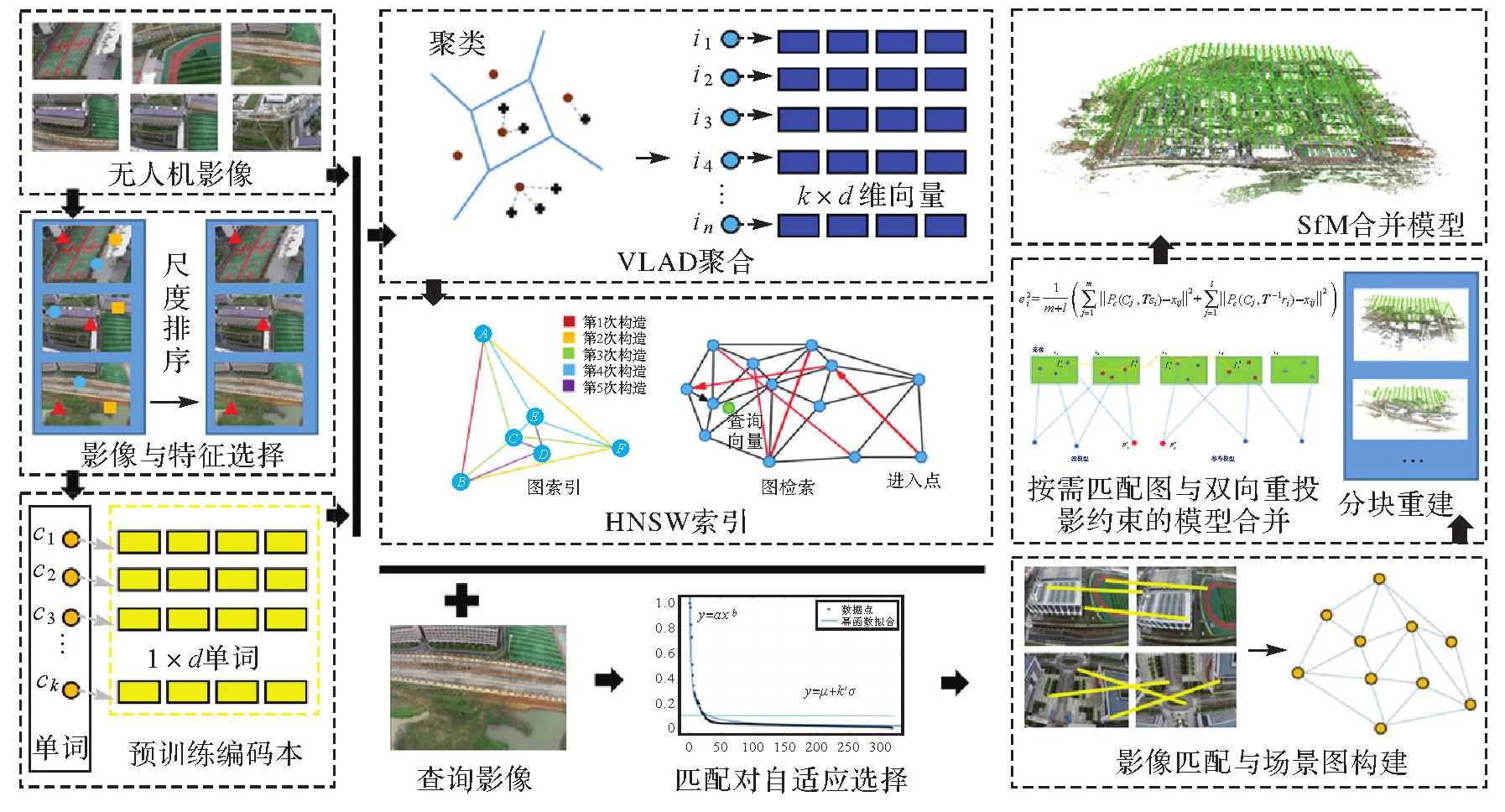

Fig. 2
The principle of graph indexing and retrieval"
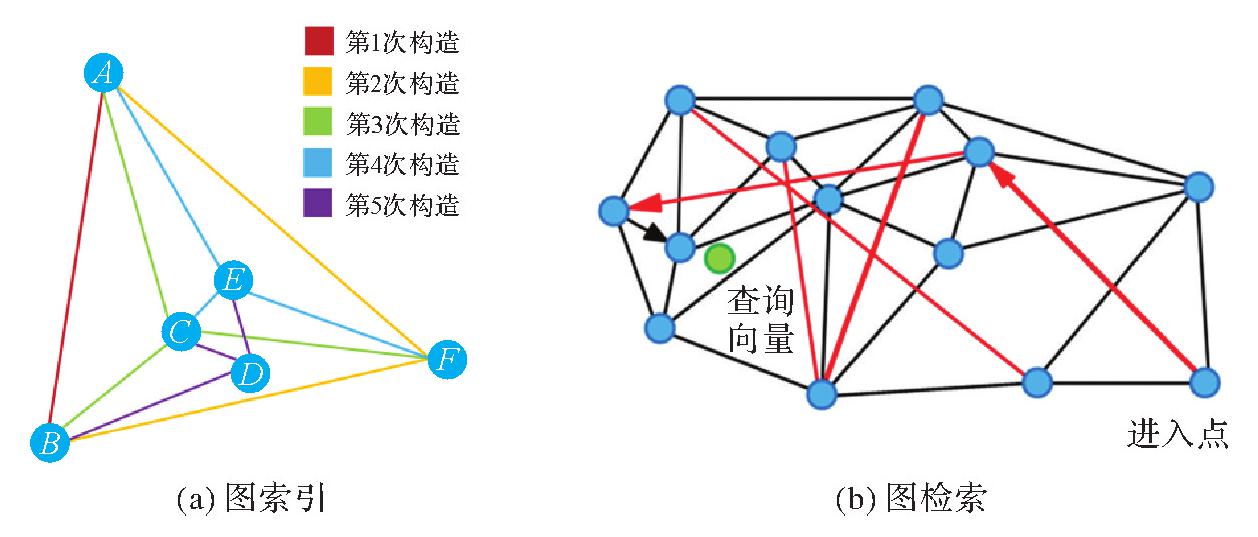
Fig. 3
The distribution of similarity scores of vocabulary tree-based retrieval"
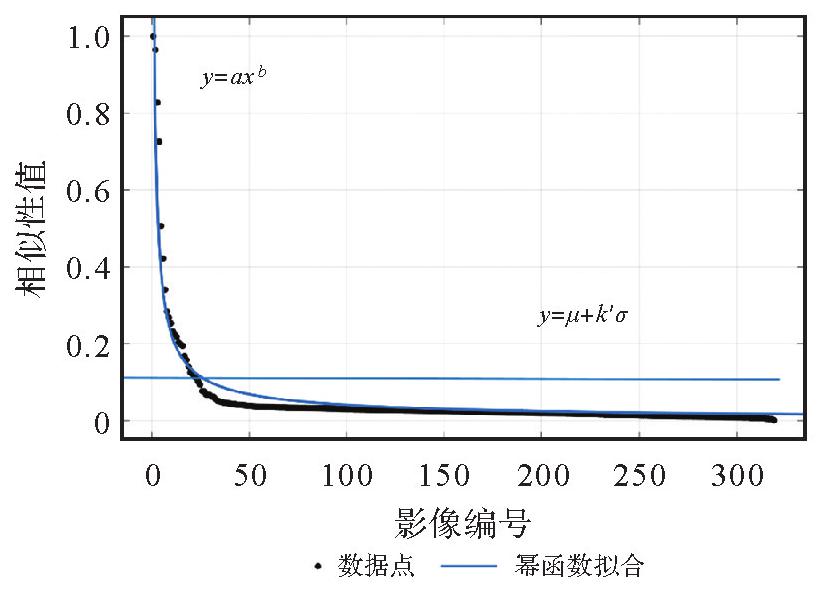
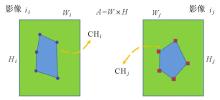
Fig. 4
The overlap area for edge weight calculation"
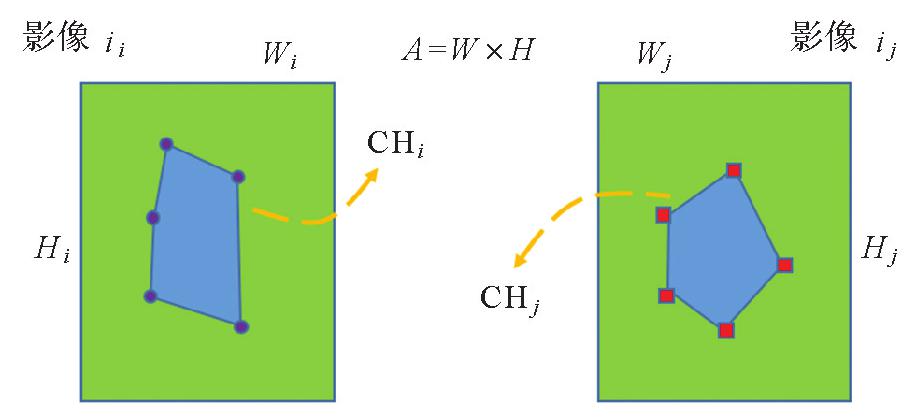
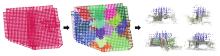
Fig. 5
The scene clustering and SfM reconstruction"
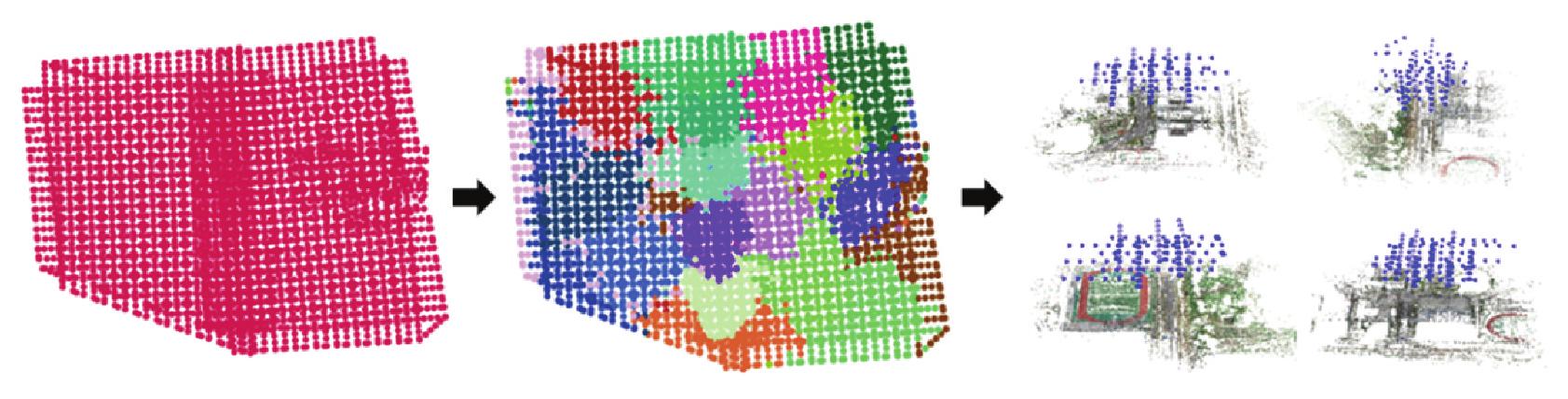

Fig. 6
Common 3D point searching"
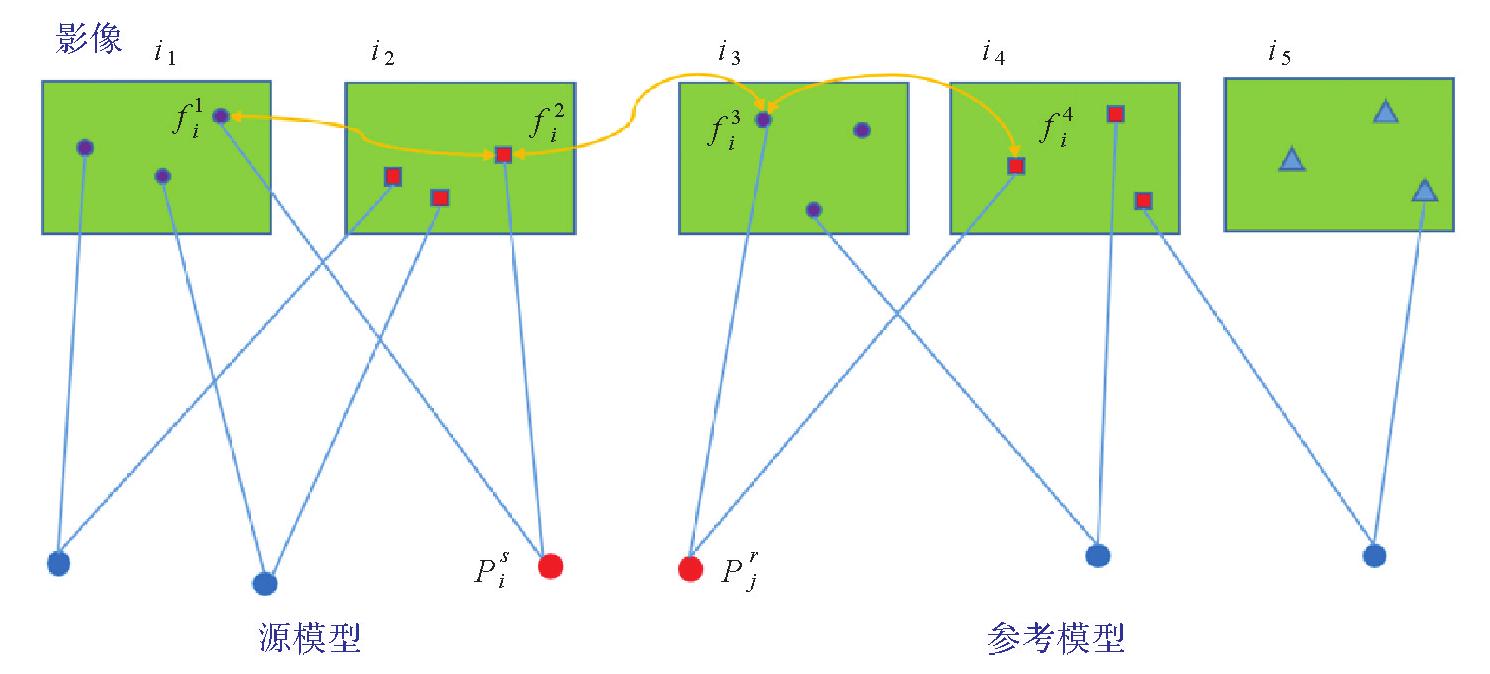

Fig. 7
Orthophotos of the three datasets"

Tab. 1
details of experimental datasets"
| 项目 | 数据1 | 数据2 | 数据3 |
|---|---|---|---|
| 飞行高度/m | 80 | — | 90 |
| 相机型号 | DJI FC6310R | DJI Zenmuse P1 | Sony ILCE-7R |
| 相机数量 | 1 | 1 | 5 |
| 焦距长度/mm | 24 | 35 | 35 |
| 倾斜角度/(°) | 0 | — | 下视/倾斜:0/45 |
| 影像数量 | 3743 | 4030 | 21 654 |
| 影像尺寸/像素 | 5472×3648 | 8192×5460 | 6000×4000 |
| 地面分辨率/cm | 2.6 | 1.2 | 1.2 |
| 数据存储空间/GB | 30 | 53 | 462 |
Fig. 8
The three datasets"

Fig. 9
The performance statistics for the number of cluster centers k"
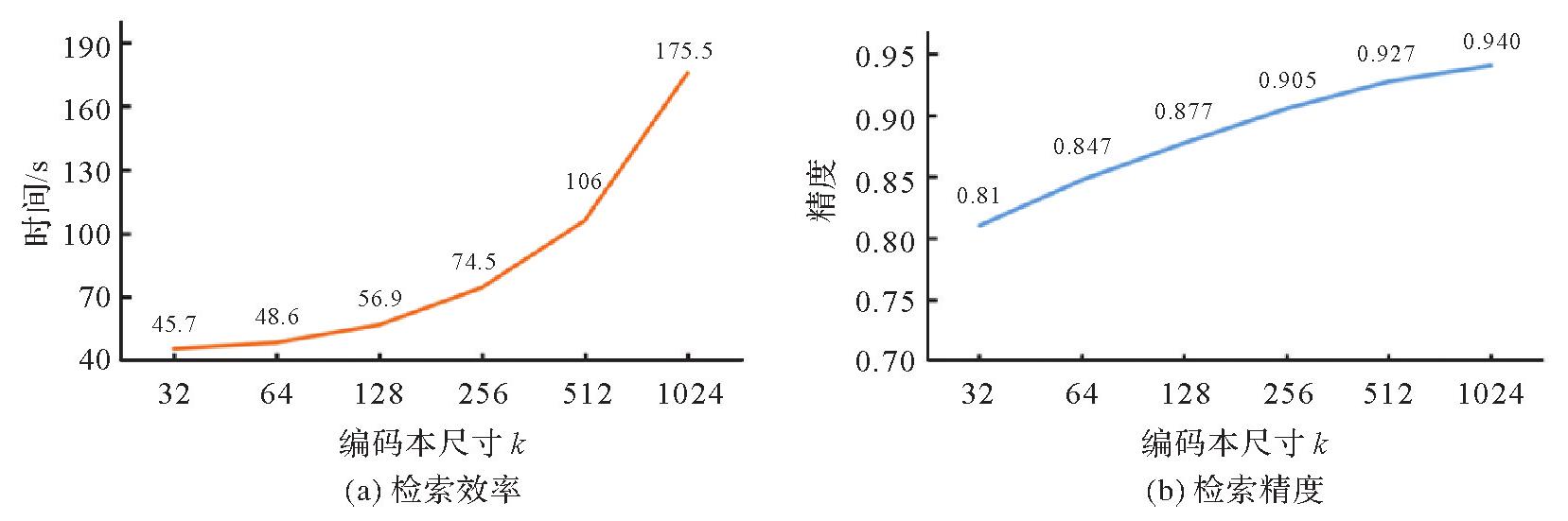
Fig. 10
The performance statistics for the maximum neighbor number M"
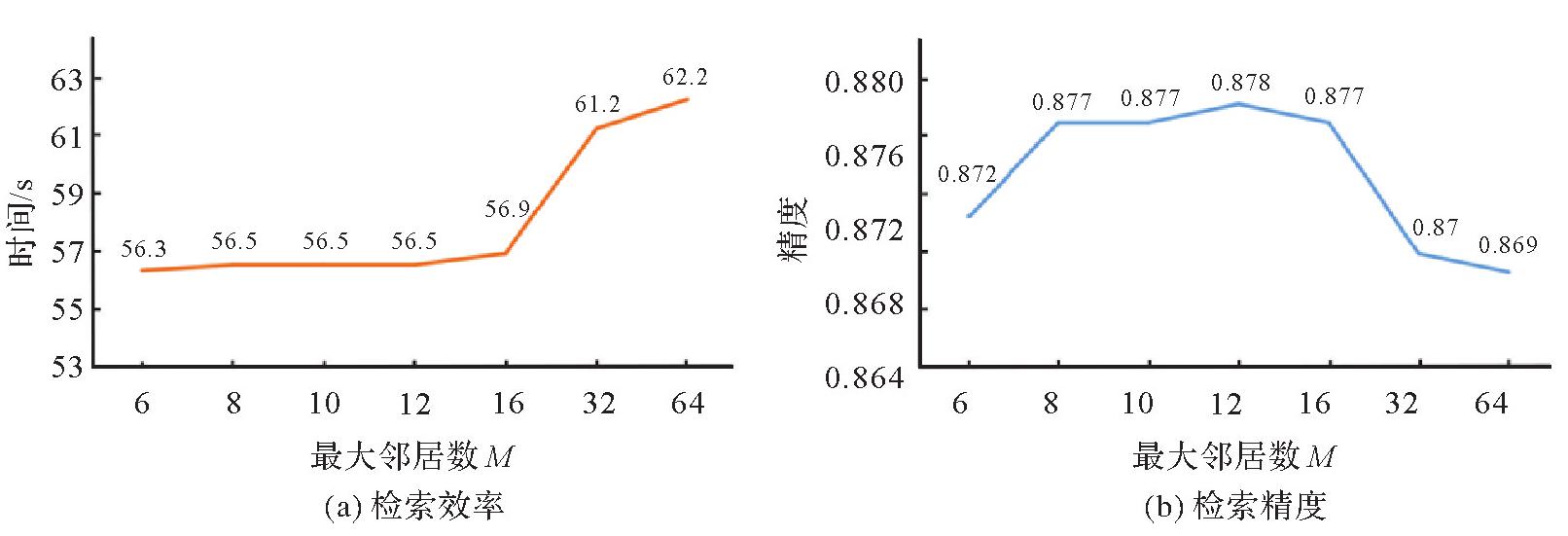
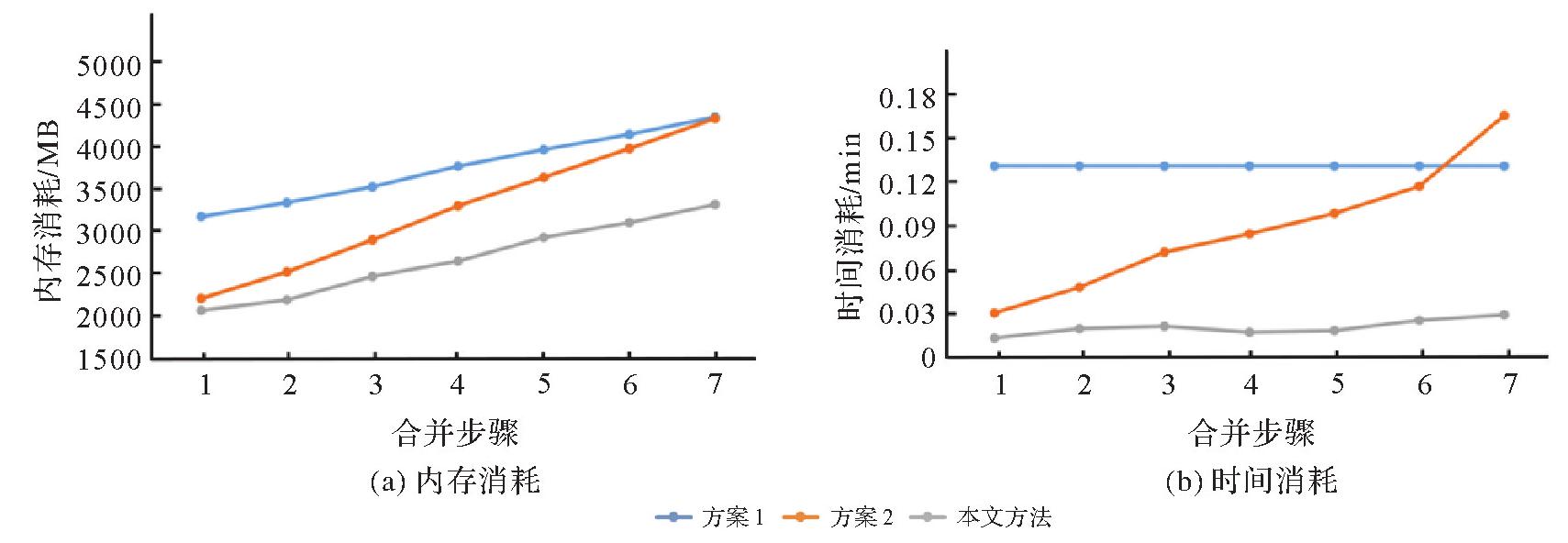
Fig. 11
Memory and time costs in cluster merging"
Tab. 2
Statistical results for match pair retrieval"
| 指标 | 数据1 | 数据2 | 数据3 |
|---|---|---|---|
| 效率/min | 1.2 | 1.8 | 9.6 |
| 精度/(%) | 90.6 | 89.8 | 93.5 |

Fig. 12
Image topological connection network from match pairs"
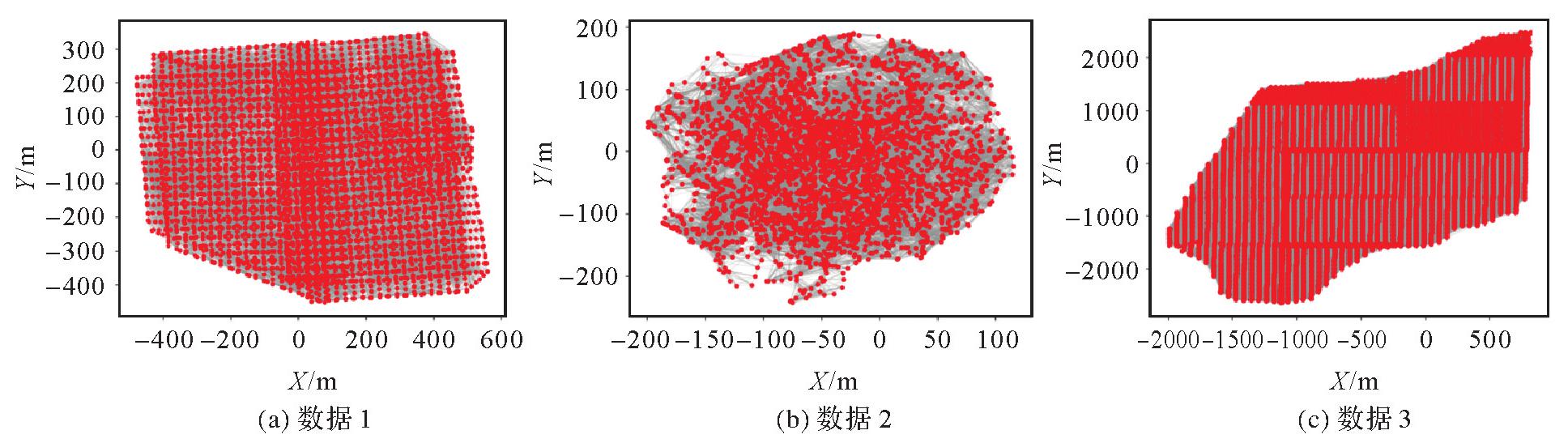
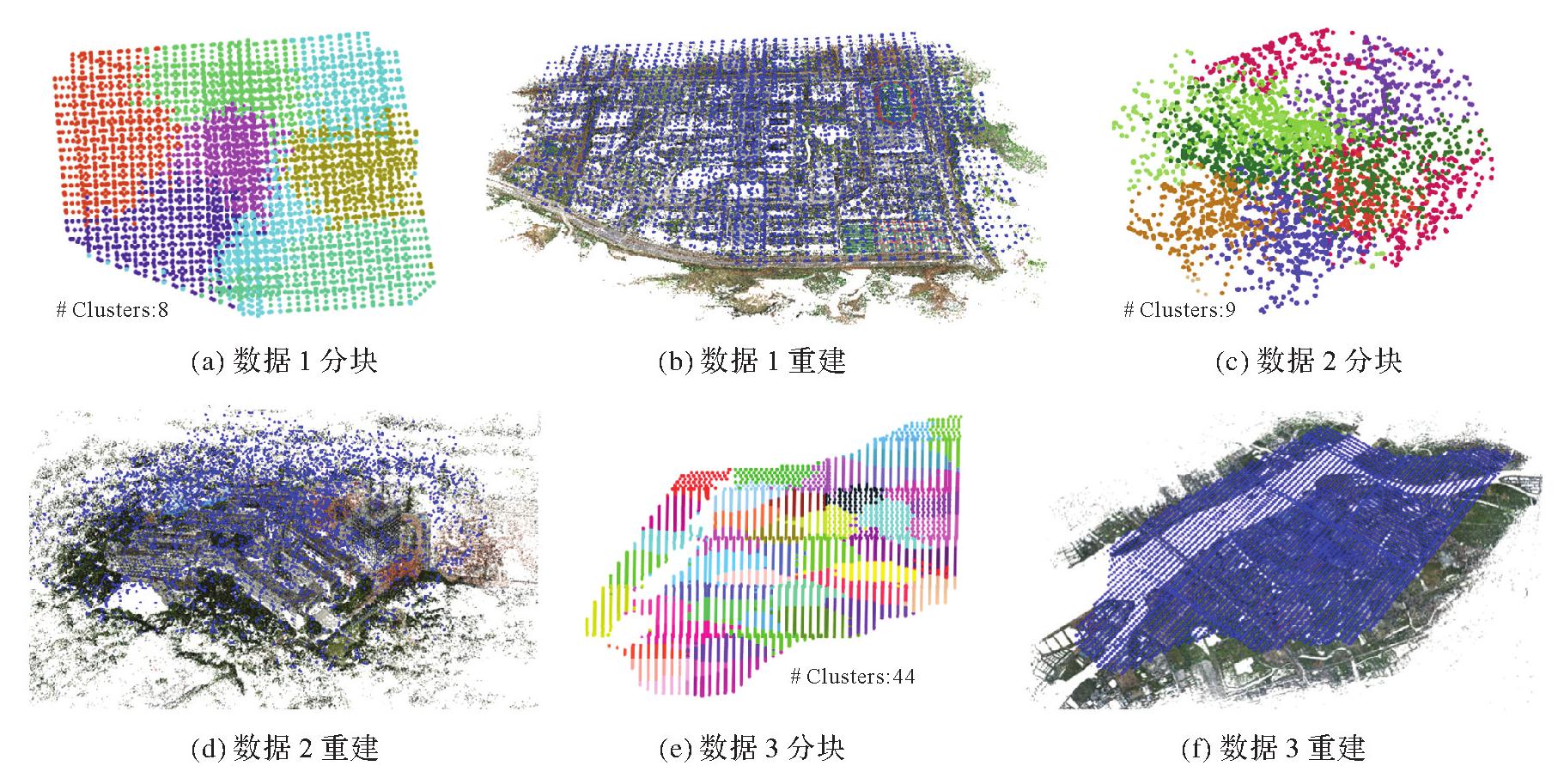
Fig. 13
The illustration of scene division and parallel reconstruction"
Tab. 3
Statistical results for SfM-based reconstruction of the proposed method"
| 指标 | 数据1 | 数据2 | 数据3 |
|---|---|---|---|
| 精度/像素 | 0.542 | 0.668 | 0.752 |
| 完整度 | 928 745 (3724) | 1 518 474 (4029) | 8 921 339 (21 568) |

Fig. 14
Comparison of match pair retrieval"

Tab. 4
Statistical results of SfM-based reconstruction of evaluated methods"
| 指标 | 方法 | 数据1 | 数据2 | 数据3 | |
|---|---|---|---|---|---|
| 效率/min | ColMap | 1 435.4 | 4 427.1 | — | |
| BoW | 32.9 | 145.2 | 1753 | ||
| Dbow2 | 31.1 | 125.5 | 1445 | ||
| Metashape | 50.0 | 186.0 | — | ||
| Pix4Dmapper | 298.2 | 636.4 | — | ||
| 本文方法 | 32.5 | 144.0 | 1778 | ||
| 精度/像素 | ColMap | 0.531 | 0.696 | — | |
| BoW | 0.542 | 0.667 | 0.766 | ||
| Dbow2 | 0.490 | 0.645 | 0.782 | ||
| Metashape | 0.957 | 1.140 | — | ||
| Pix4Dmapper | 0.318 | 0.327 | — | ||
| 本文方法 | 0.542 | 0.668 | 0.752 | ||
| 完整度 | ColMap | 1 034 379(3737) | 1 611 067(4029) | — | |
| BoW | 1 001 797(3716) | 1 507 983(4029) | 9 253 968(21 647) | ||
| Dbow2 | 925 530(3720) | 1 506 702(4027) | 9 047 089(21 625) | ||
| Metashape | 1 764 717(3741) | 1 536 021(4030) | — | ||
| Pix4Dmapper | 468 254(3620) | 726 366(3909) | — | ||
| 本文方法 | 928 745(3724) | 1 518 474(4029) | 8 921 339(21 568) |
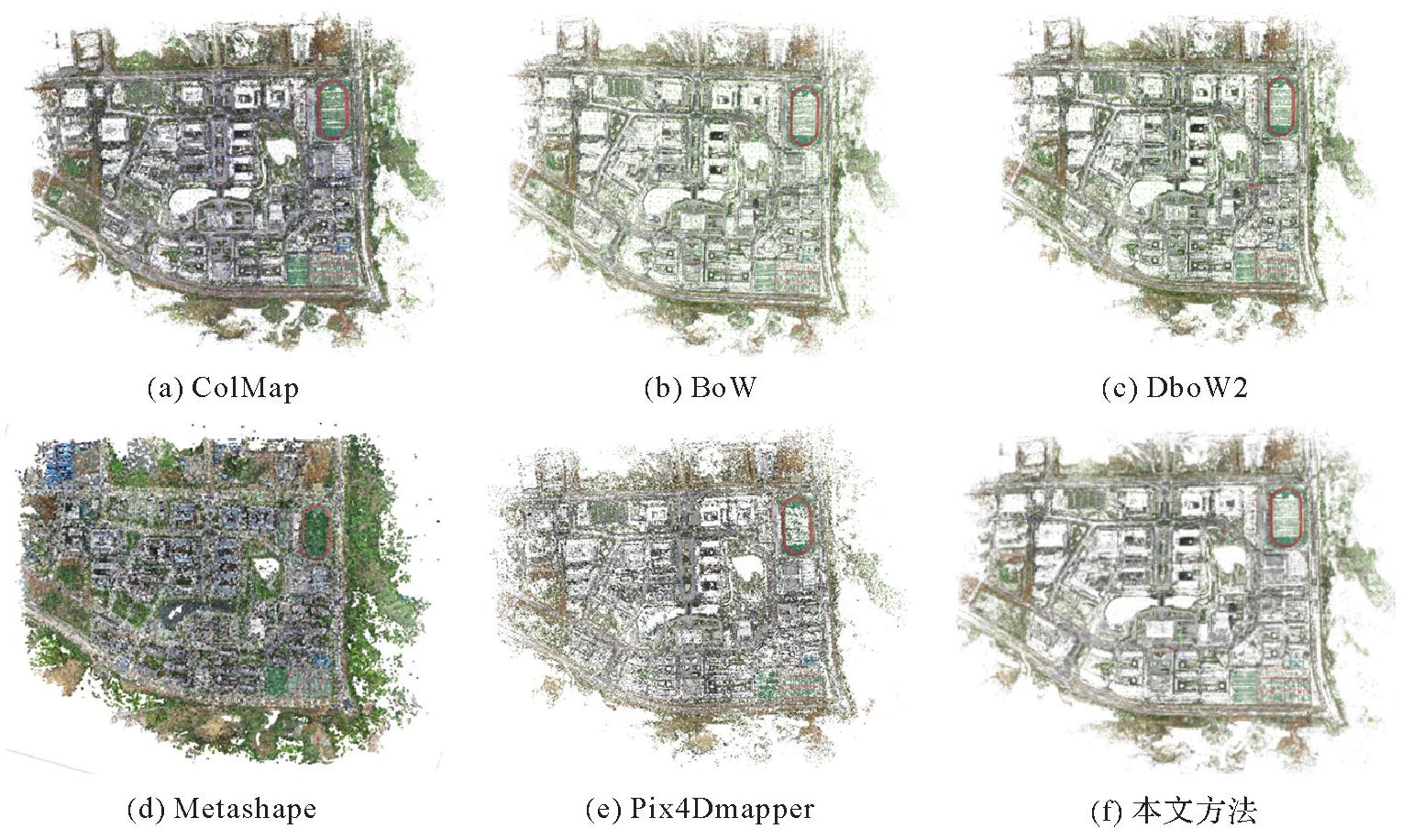
Fig. 15
Reconstruction results of six methods for dataset 1"
Tab. 5
Residual statistical results for absolute orientation"
| 方法 | 均值 | 标准差 | ||||
|---|---|---|---|---|---|---|
| |X| | |Y| | |Z| | |X| | |Y| | |Z| | |
| BoW | 0.066 | 0.063 | 0.033 | 0.059 | 0.074 | 0.036 |
| Dbow2 | 0.048 | 0.021 | 0.058 | 0.081 | 0.030 | 0.044 |
| Pix4Dmapper | 0.010 | 0.012 | 0.015 | 0.013 | 0.016 | 0.019 |
| 本文方法 | 0.023 | 0.022 | 0.055 | 0.029 | 0.026 | 0.040 |
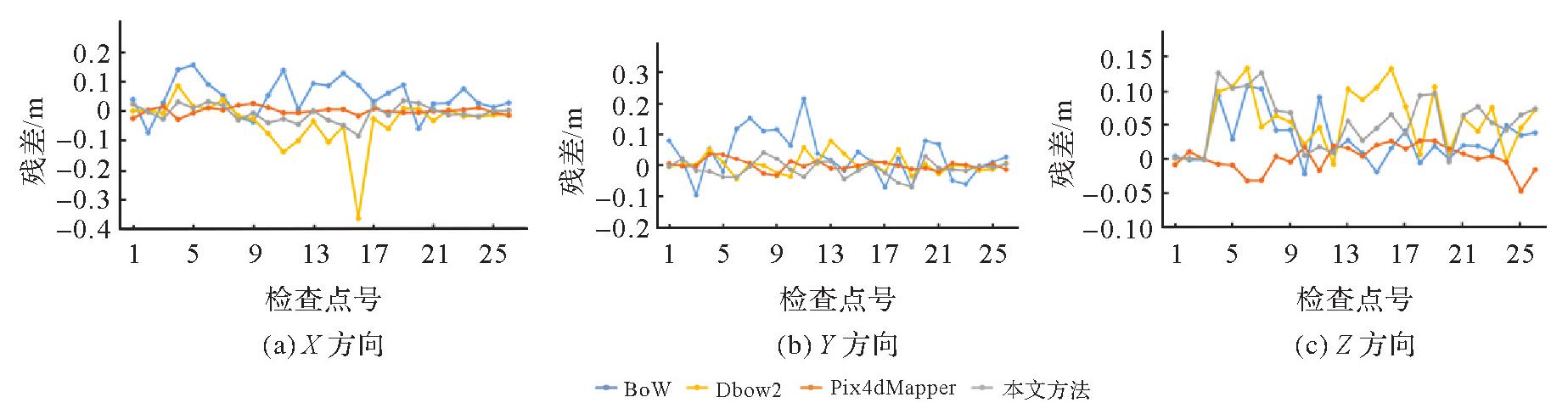
Fig. 16
Individual residual plots of check points"
| [1] | JIANG San, JIANG Wanshou, WANG Lizhe. Unmanned aerial vehicle-based photogrammetric 3D mapping: a survey of techniques, applications, and challenges[J]. IEEE Geoscience and Remote Sensing Magazine, 2022, 10(2): 135-171. |
| [2] | LI Qingquan, HUANG Hui, YU Wenshuai, et al. Optimized views photogrammetry: precision analysis and a large-scale case study in Qingdao[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2023, 16: 1144-1159. |
| [3] | 李清泉, 黄惠, 姜三, 等. 优视摄影测量方法及精度分析[J]. 测绘学报, 2022, 51(6): 996-1007.DOI: 10.11947/j.AGCS.2022.20210685. |
| LI Qingquan, HUANG Hui, JIANG San, et al. Optimized views photogrammetry and its precision analysis[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(6): 996-1007.DOI: 10.11947/j.AGCS.2022.20210685. | |
| [4] | MURTIYOSO A, GRUSSENMEYER P. Documentation of heritage buildings using close-range UAV images: dense matching issues, comparison and case studies[J]. The Photogrammetric Record, 2017, 32(159): 206-229. |
| [5] | JIANG San, JIANG Wanshou, HUANG Wei, et al. UAV-based oblique photogrammetry for outdoor data acquisition and offsite visual inspection of transmission line[J]. Remote Sensing, 2017, 9(3): 278. |
| [6] | 裴慧坤, 姜三, 林国安, 等. 依托无人机倾斜摄影的电力走廊三维重建[J]. 测绘科学, 2016, 41(12): 292-296. |
| PEI Huikun, JIANG San, LIN Guoan, et al. 3D reconstruction of transmission route based on UAV oblique photogrammetry[J]. Science of Surveying and Mapping, 2016, 41(12): 292-296. | |
| [7] | WANG Xuan, XIANG Hanyu, NIU Wenyuan, et al. Oblique photogrammetry supporting procedural tree modeling in urban areas[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2023, 200: 120-137. |
| [8] | 于英, 张永生, 薛武, 等. 一种稳健性增强和精度提升的增量式运动恢复结构方法[J]. 测绘学报, 2019, 48(2): 207-215.DOI: 10.11947/j.AGCS.2019.20170665. |
| YU Ying, ZHANG Yongsheng, XUE Wu, et al. A incremental structure from motion method of robustness enhancement and accuracy improvement[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(2): 207-215.DOI: 10.11947/j.AGCS.2019.20170665. | |
| [9] | 陈武, 姜三, 李清泉, 等. 无人机影像增量式运动恢复结构研究进展[J]. 武汉大学学报(信息科学版), 2022, 47(10): 1662-1674. |
| CHEN Wu, JIANG San, LI Qingquan, et al. Recent research of incremental structure from motion for unmanned aerial vehicle images[J]. Geomatics and Information Science of Wuhan University, 2022, 47(10): 1662-1674. | |
| [10] | ALIAKBARPOUR H, PALANIAPPAN K, SEETHARAMAN G. Fast structure from motion for sequential and wide area motion imagery[C]//Proceedings of 2015 IEEE International Conference on Computer Vision Workshop. Santiago: IEEE, 2015: 1086-1093. |
| [11] | XU Zhihua, WU Lixin, GERKE M, et al. Skeletal camera network embedded structure-from-motion for 3D scene reconstruction from UAV images[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 121: 113-127. |
| [12] | JIANG San, JIANG Wanshou. Efficient structure from motion for oblique UAV images based on maximal spanning tree expansion[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 132: 140-161. |
| [13] | JIANG San, JIANG Wanshou. Efficient match pair selection for oblique UAV images based on adaptive vocabulary tree[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 161: 61-75. |
| [14] | SCHONBERGER J L, FRAHM J M. Structure-from-motion revisited[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 4104-4113. |
| [15] | WU Changchang, AGARWAL S, CURLESS B, et al. Multicore bundle adjustment[C]//Proceedings of 2011 CVPR. Colorado: IEEE, 2011: 3057-3064. |
| [16] | SUN Yanbiao, SUN Huabo, YAN Lei, et al. RBA: reduced bundle adjustment for oblique aerial photogrammetry[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 121: 128-142. |
| [17] | JIANG San, LI Qingquan, JIANG Wanshou, et al. Parallel structure from motion for UAV images via weighted connected dominating set[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1-13. |
| [18] | 张力, 刘玉轩, 孙洋杰, 等. 数字航空摄影三维重建理论与技术发展综述[J]. 测绘学报, 2022, 51(7): 1437-1457.DOI: 10.11947/j.AGCS.2022.20220130. |
| ZHANG Li, LIU Yuxuan, SUN Yangjie, et al. A review of developments in the theory and technology of three-dimensional reconstruction in digital aerial photogrammetry[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(7): 1437-1457.DOI: 10.11947/j.AGCS.2022.20220130. | |
| [19] | CHEN Yu, SHEN Shuhan, CHEN Yisong, et al. Graph-based parallel large scale structure from motion[J]. Pattern Recognition, 2020, 107: 107537. |
| [20] | 许彪, 董友强, 张力, 等. 分区优化混合SfM方法[J]. 测绘学报, 2022, 51(1): 115-126.DOI: 10.11947/j.AGCS.2021.20210105. |
| XU Biao, DONG Youqiang, ZHANG Li, et al. A hybrid SfM method based on partition optimization[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(1): 115-126.DOI: 10.11947/j.AGCS.2021.20210105. | |
| [21] | 屈文虎, 刘振东, 蔡昊琳, 等. 顾及场景连通性的混合式SfM方法[J]. 测绘学报, 2023, 52(6): 966-979.DOI: 10.11947/j.AGCS.2023.20220448. |
| QU Wenhu, LIU Zhendong, CAI Haolin, et al. A hybrid SfM method considering scene connectivity[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(6): 966-979. DOI: 10.11947/j.AGCS.2023.20220448. | |
| [22] | JEGOU H, PERRONNIN F, DOUZE M, et al. Aggregating local image descriptors into compact codes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(9): 1704-1716. |
| [23] | MALKOV Y A, YASHUNIN D A. Efficient and robust approximate nearest neighbor search using hierarchical navigable small world graphs[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 42(4): 824-836. |
| [24] | WU Changchang. Towards linear-time incremental structure from motion[C]//Proceedings of 2013 International Conference on 3D Vision.New York: ACM Press, 2013: 127-134. |
| [25] | ARAI K, BARAKBAH A R. Hierarchical K-means: an algorithm for centroids initialization for K-means[J]. Reports of the Faculty of Science and Engineering, 2007, 36(1): 25-31. |
| [26] | SHI Jianbo, MALIK J. Normalized cuts and image segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(8): 888-905. |
| [27] | UMEYAMA S. Least-squares estimation of transformation parameters between two point patterns[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1991, 13(4): 376-380. |
| [28] | ZHU S, SHEN T, ZHOU L, et al. Parallel structure from motion from local increment to global averaging[EB/OL]. [2023-07-08].https://arxiv.org/pdf/1702.08601.pdf. |
| [1] | XIAO Teng, WANG Xin, MEI Xi, YE Zhiwei, YAN Qingsong, DENG Fei. Robust merging of subblock reconstructions for parallel structure from motion in photogrammetry [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(2): 332-343. |
| [2] | JIANG San, LIU Kai, LI Qingquan, JIANG Wanshou. Learned local features for SfM reconstruction of UAV images [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(2): 321-331. |
| [3] | YE Famao, MENG Xianglong, DONG Meng, Nie Yunju, GE Yun, CHEN Xiaoyong. Remote sensing image retrieval with ant colony optimization and a weighted image-to-class distance [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(5): 612-620. |
| [4] | ZHANG Xing, LIN Jing, LI Qingquan, LIU Tao, FANG Zhixiang. Continuous indoor visual localization using a perceptual Hash algorithm and spatial constraint [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(12): 1639-1649. |
| [5] | JIANG San, JIANG Wanshou. Robust image matching constrained by delaunay triangulation [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(3): 322-333. |
| [6] | HE Haiqing, CHEN Min, CHEN Ting, LI Dajun, CHEN Xiaoyong. Single and multiple rotation averaging iterative optimization coupled 3D reconstruction for low-altitude images using SfM algorithm [J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(6): 688-697. |
| [7] | YU Ying, ZHANG Yongsheng, XUE Wu, WANG Tao. A incremental structure from motion method of robustness enhancement and accuracy improvement [J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(2): 207-215. |
| [8] | WAN Jie, Alper YILMAZ. Machine Vision Special Issue: Building Match Graph Using Deep Convolution Feature for Structure from Motion [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(6): 882-891. |
| [9] | YUAN Yi, CHENG Liang, ZONG Wenwen, LI Shuyi, LI Manchun. Crowd-sourced Pictures Geo-localization Method Based on 3D Reconstruction [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(5): 631-643. |
| [10] | XUE Wu, ZHANG Yongsheng, ZHAO Ling, YU Ying, WANG Tao, LI Lei. Compareison of the Accuracy of Incremental SFM with POS-aided Bundle Adjustment [J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(2): 198-207. |
| [11] | ZHANG Zhengpeng, JIANG Wanshou, ZHANG Jing. An Matching Method for Vehicle-borne Panoramic Image Sequence Based on Adaptive Structure from Motion Feature [J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(10): 1132-1141. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||