

Acta Geodaetica et Cartographica Sinica ›› 2025, Vol. 54 ›› Issue (12): 2153-2167.doi: 10.11947/j.AGCS.2025.20250057
• Geodesy and Navigation • Previous Articles Next Articles
Jian CHEN1,2,3( ), Jiahui WANG1,2,3, Xingwang ZHAO1,2,3, Chao LIU1,2,3(), Chunyang LIU1,2,3, Xuexiang YU1,2,3
), Jiahui WANG1,2,3, Xingwang ZHAO1,2,3, Chao LIU1,2,3(), Chunyang LIU1,2,3, Xuexiang YU1,2,3
Received:2025-02-14
Revised:2025-10-28
Online:2026-01-15
Published:2026-01-15
Contact:
Chao LIU
E-mail:cj_19930815@163.com;chliu1@aust.edu.cn
About author:CHEN Jian (1993—), male, PhD, lecturer, majors in multi-frequency multi-system GNSS satellite precise positioning. E-mail: cj_19930815@163.com
Supported by:CLC Number:
Jian CHEN, Jiahui WANG, Xingwang ZHAO, Chao LIU, Chunyang LIU, Xuexiang YU. Single-epoch RTK positioning optimization method based on BDS-3/Galileo multi-frequency ionosphere-reduced combinations[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(12): 2153-2167.
Tab. 1
Triple-frequency EWL/WL phase combination properties from BDS-3 and Galileo"
| 不同系统 | 组合系数 | λ(3)/m | β(3) | σTL/cycle | |||
|---|---|---|---|---|---|---|---|
| a1 | a2 | a3 | d≤20 km | 20<d≤100 km | |||
| BDS-3(B1C,B2a,B3I) | 0 | -1 | 1 | 3.256 1 | -1.663 1 | 0.063 2 | 0.163 9 |
| 1 | 2 | -3 | 2.442 1 | -0.610 2 | 0.158 8 | 0.175 4 | |
| 1 | 1 | -2 | 1.395 5 | -1.061 4 | 0.113 9 | 0.252 7 | |
| Galileo(E1,E5a,E5b) | 0 | -1 | 1 | 9.768 4 | -1.747 7 | 0.056 9 | 0.077 8 |
| 1 | 3 | -4 | 1.085 4 | -1.157 6 | 0.213 3 | 0.381 4 | |
| 1 | 2 | -3 | 0.976 8 | -1.216 6 | 0.165 8 | 0.404 7 | |
Tab. 2
Quad-frequency EWL/WL phase combination properties from BDS-3 and Galileo"
| 不同系统 | 组合系数 | λ(4)/m | β(4) | σTL/cycle | ||||
|---|---|---|---|---|---|---|---|---|
| a1 | a2 | a3 | a4 | d≤20 km | 20<d≤100 km | |||
| BDS-3(B1C,B1I,B2a,B3I) | 1 | -1 | 0 | 0 | 20.932 3 | -1.009 2 | 0.074 0 | 0.075 4 |
| 0 | 0 | -1 | 1 | 3.256 1 | -1.663 1 | 0.0632 | 0.163 9 | |
| -1 | 2 | 2 | -3 | 3.185 4 | -0.488 7 | 0.189 6 | 0.195 1 | |
| 0 | 1 | 2 | -3 | 2.764 6 | -0.557 5 | 0.158 4 | 0.169 5 | |
| 1 | 0 | 2 | -3 | 2.442 1 | -0.610 2 | 0.158 8 | 0.175 4 | |
| Galileo(E1,E6,E5a,E5b) | 0 | 0 | -1 | 1 | 9.768 4 | -1.747 7 | 0.056 9 | 0.077 8 |
| 0 | 1 | 1 | -2 | 7.326 3 | -1.503 0 | 0.099 8 | 0.116 9 | |
| 0 | 1 | 0 | -1 | 4.186 5 | -1.607 9 | 0.061 8 | 0.129 4 | |
| 1 | -3 | 2 | 0 | 3.256 1 | -0.303 5 | 0.159 1 | 0.161 7 | |
| 1 | -2 | 1 | 0 | 1.542 4 | -1.012 1 | 0.112 7 | 0.225 0 | |
Tab. 3
Penta-frequency EWL/WL phase combination properties from BDS-3 and Galileo"
| 不同系统 | 组合系数 | λ(5)/m | β(5) | σTL/cycle | |||||
|---|---|---|---|---|---|---|---|---|---|
| a1 | a2 | a3 | a4 | a5 | d≤20 km | 20<d≤100 km | |||
| BDS-3(B1C,B1I,B2a,B2b,B3I) | 1 | -1 | 0 | 0 | 0 | 20.932 3 | -1.009 2 | 0.074 0 | 0.075 4 |
| 0 | 0 | -1 | 1 | 0 | 9.768 4 | -1.747 7 | 0.056 9 | 0.077 8 | |
| 0 | 0 | 0 | -1 | 1 | 4.884 2 | -1.620 8 | 0.060 8 | 0.115 5 | |
| 0 | 0 | -1 | 0 | 1 | 3.256 1 | -1.663 1 | 0.063 2 | 0.163 9 | |
| 1 | -1 | -1 | 0 | 1 | 2.817 8 | -1.575 1 | 0.098 0 | 0.192 4 | |
| 0 | 1 | 2 | 0 | -3 | 2.764 6 | -0.557 5 | 0.158 4 | 0.169 5 | |
| 0 | 1 | 1 | 1 | -3 | 2.154 8 | -0.820 0 | 0.149 6 | 0.187 5 | |
| Galileo(E1,E5a,E5b,E5,E6) | 0 | -1 | 0 | 1 | 0 | 19.536 8 | -1.770 2 | 0.056 0 | 0.062 1 |
| 0 | 0 | 1 | -1 | 0 | 19.536 8 | -1.725 2 | 0.056 8 | 0.062 5 | |
| 0 | -1 | 1 | 0 | 0 | 9.768 4 | -1.747 7 | 0.056 9 | 0.077 8 | |
| 0 | 0 | -1 | 0 | 1 | 4.186 5 | -1.607 9 | 0.061 8 | 0.129 4 | |
| 1 | 2 | 0 | 0 | -3 | 3.256 1 | -0.303 5 | 0.159 1 | 0.161 7 | |
| 1 | 1 | 0 | 1 | -3 | 2.791 0 | -0.513 1 | 0.149 5 | 0.159 3 | |
| 1 | 1 | 1 | 0 | -3 | 2.442 1 | -0.664 6 | 0.150 0 | 0.170 5 | |
| 1 | 1 | -1 | 1 | -2 | 1.674 6 | -0.951 0 | 0.125 0 | 0.209 9 | |
| 1 | 1 | 0 | 0 | -2 | 1.542 4 | -1.012 1 | 0.112 7 | 0.225 0 | |
Tab. 4
Properties of NL combinations for BDS-3 and Galileo in triple-quad-penta-frequency observations"
| 不同系统 | 组合系数 | λ(n)/m | β(n) | σTL/cycle | |||||
|---|---|---|---|---|---|---|---|---|---|
| a1 | a2 | a3 | a4 | a5 | σ∇ΔI1=5 cm | σ∇ΔI1=25 cm | |||
| BDS-3 | 1 | 0 | 0 | 0.190 3 | 1 | 0.273 3 | 1.321 6 | ||
| 4 | -3 | 0 | 0.108 1 | -0.009 9 | 0.258 9 | 0.337 9 | |||
| 2 | 2 | -3 | 0 | 0.109 3 | 0.000 5 | 0.210 9 | 0.300 3 | ||
| 2 | 2 | -3 | 0 | 0 | 0.109 3 | 0.000 5 | 0.210 9 | 0.300 3 | |
| 2 | 3 | 0 | -1 | -3 | 0.106 3 | -0.001 9 | 0.249 8 | 0.332 8 | |
| 3 | 1 | -1 | -3 | 1 | 0.108 7 | -0.001 9 | 0.233 0 | 0.317 0 | |
| Galileo | 1 | 0 | 0 | 0.190 3 | 1 | 0.273 3 | 1.321 6 | ||
| 4 | -2 | -1 | 0.109 3 | 0.009 6 | 0.246 5 | 0.326 8 | |||
| 4 | -3 | 0 | 0.108 1 | -0.009 9 | 0.258 9 | 0.337 9 | |||
| 4 | 0 | -2 | -1 | 0.109 3 | 0.009 6 | 0.246 5 | 0.326 8 | ||
| 4 | 0 | -3 | 0 | 0.108 1 | -0.009 9 | 0.258 9 | 0.337 9 | ||
| 4 | -3 | -1 | 1 | 0 | 0.108 7 | -0.000 3 | 0.264 7 | 0.340 9 | |
| 4 | -2 | 0 | -1 | 0 | 0.108 7 | -0.000 1 | 0.246 4 | 0.327 0 | |
| 4 | -1 | 1 | -3 | 0 | 0.108 7 | 0.000 2 | 0.265 3 | 0.341 4 | |
| 4 | 0 | -3 | -1 | 1 | 0.108 3 | -0.002 9 | 0.266 5 | 0.342 9 | |

Fig. 1
Flowchart of single-epoch RTK positioning using multi-frequency IR combinations applied to BDS-3 and Galileo"

Tab. 5
Baseline information"
| 数据集 | 基线 | 年积日 | 长度/km | 观测时长/h | 采样间隔/s | 接收机类型 | 位置 |
|---|---|---|---|---|---|---|---|
| A | STR1-TID1 | 2025-128 | 9.7 | 24 | 30 | SEPT POLARX5 | 澳大利亚 堪培拉 |
| B | LYSK-NJGY | 2025-199 | 29.9 | 24 | 30 | NET20 PLUS/HEMI_DF5r | 中国 南京 |
| C | CEBR-VILL | 2025-14 | 35.3 | 24 | 30 | SEPT POLARX5 | 西班牙 阿维拉•马德里 |
Tab. 6
Scheme for selecting combination observables in BDS-3 and Galileo TCAR"
| 系统 | 方案 | TC-Ⅰ | TC-Ⅱ | TC-Ⅲ | |
|---|---|---|---|---|---|
| BDS-3 | 1 | (0,-1,1) | (1,1,-2) | (1,0,0) | (4,-3,0) |
| 2 | (1,2,-3) | ||||
| Galileo | 3 | (0,-1,1) | (1,2,-3) | (1,0,0) | (4,-2,-1) |
| 4 | (1,3,-4) | ||||
Tab. 7
Ambiguity fixing success rates of different combination for BDS-3 and Galileo TCAR"
| 系统 | 数据集 | 方案 | TC-Ⅰ | TC-Ⅱ | BF | IR |
|---|---|---|---|---|---|---|
| BDS-3 | A | 1 | 100 | 100 | 97.92 | 99.97 |
| 2 | 100 | 100 | 97.92 | 99.97 | ||
| B | 1 | 100 | 100 | 79.93 | 90.69 | |
| 2 | 100 | 100 | 79.93 | 90.69 | ||
| C | 1 | 100 | 99.73 | 73.30 | 80.52 | |
| 2 | 100 | 99.20 | 73.19 | 80.52 | ||
| Galileo | A | 3 | 100 | 90.10 | 99.44 | 99.48 |
| 4 | 100 | 83.58 | 99.27 | 99.41 | ||
| C | 3 | 100 | 64.19 | 73.97 | 81.61 | |
| 4 | 100 | 61.06 | 74.47 | 81.69 |
Tab. 8
Ambiguity fixing success rate of BDS-3/Galileo TCAR"
| 数据集 | TC-Ⅰ | TC-Ⅱ | BF | IR |
|---|---|---|---|---|
| A | 99.97 | 99.97 | 99.97 | 99.97 |
| C | 100 | 97.22 | 95.35 | 97.64 |
Tab. 9
Scheme for selecting combination observables in BDS-3 and Galileo QCAR"
| 系统 | 方案 | QC-Ⅰ | QC-Ⅱ | QC-Ⅲ | QC-Ⅳ | |
|---|---|---|---|---|---|---|
| BDS-3 | 5 | (0,0,-1,1) | (0,1,2,-3) | |||
| 6 | (1,-1,0,0) | (0,0,-1,1) | (1,0,2,-3) | (1,0,0,0) | (2,2,-3,0) | |
| 7 | (0,0,-1,1) | (-1,2,2,-3) | ||||
| Galileo | 8 | (0,1,1,-2) | (1,-3,2,0) | |||
| 9 | (0,0,-1,1) | (0,1,0,-1) | (1,-3,2,0) | (1,0,0,0) | (4,0,-2,-1) | |
| 10 | (0,1,0,-1) | (1,-2,1,0) | ||||
Tab. 10
Ambiguity fixing success rates of different combination schemes for BDS-3 and Galileo QCAR"
| 系统 | 数据集 | 方案 | QC-Ⅰ | QC-Ⅱ | QC-Ⅲ | BF | IR |
|---|---|---|---|---|---|---|---|
| BDS-3 | A | 5 | 100 | 100 | 100 | 99.97 | 99.97 |
| 6 | 100 | 100 | 100 | 99.97 | 99.97 | ||
| 7 | 100 | 100 | 100 | 99.97 | 99.97 | ||
| B | 5 | 100 | 100 | 100 | 93.35 | 98.49 | |
| 6 | 100 | 100 | 100 | 93.35 | 98.49 | ||
| 7 | 100 | 100 | 100 | 93.35 | 98.49 | ||
| C | 5 | 100 | 100 | 99.88 | 82.35 | 86.01 | |
| 6 | 100 | 100 | 99.76 | 82.35 | 86.01 | ||
| 7 | 100 | 100 | 99.92 | 82.35 | 86.01 | ||
| Galileo | A | 8 | 100 | 100 | 99.93 | 99.90 | 99.93 |
| 9 | 100 | 100 | 99.93 | 99.90 | 99.93 | ||
| 10 | 100 | 100 | 100 | 99.90 | 99.93 | ||
| C | 8 | 100 | 100 | 97.44 | 85.38 | 89.79 | |
| 9 | 100 | 100 | 99.22 | 85.56 | 89.36 | ||
| 10 | 100 | 100 | 99.72 | 85.56 | 89.40 |
Tab. 11
Ambiguity fixing success rate of BDS-3/Galileo QCAR"
| 数据集 | QC-Ⅰ | QC-Ⅱ | QC-Ⅲ | BF | IR |
|---|---|---|---|---|---|
| A | 100 | 100 | 100 | 99.97 | 99.97 |
| C | 100 | 100 | 99.24 | 96.35 | 97.74 |

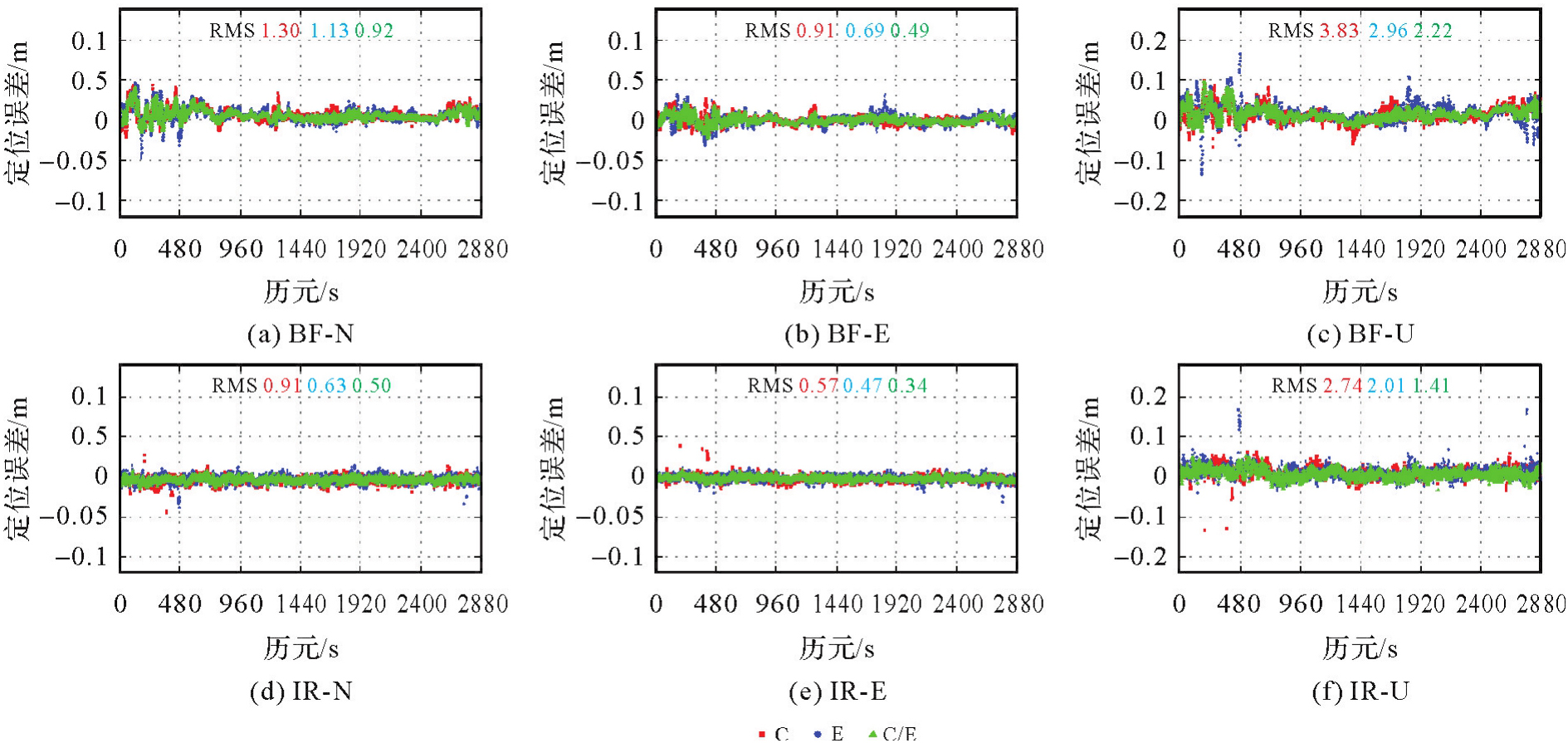
Fig. 2
Positioning errors and RMS values for NL combinations in the database A"
Tab. 12
The improvement ratio of IR combinations over BF in positioning accuracy under three modes"
| 数据集 | 方向 | BDS-3 | Galileo | BDS-3/Galileo |
|---|---|---|---|---|
| A | N | 30.00 | 44.25 | 45.65 |
| E | 37.26 | 31.88 | 30.61 | |
| U | 28.46 | 32.09 | 36.49 | |
| 水平 | 32.33 | 40.63 | 41.99 | |
| 三维 | 29.01 | 33.44 | 37.45 | |
| C | N | 30.85 | 35.63 | 65.14 |
| E | 20.56 | 22.57 | 72.91 | |
| U | 2.22 | 13.04 | 33.49 | |
| 水平 | 24.16 | 27.15 | 70.73 | |
| 三维 | 8.72 | 16.23 | 45.49 |
Tab. 13
Scheme for selecting combination observables in BDS-3 and Galileo PCAR"
| 系统 | 方案 | PC-Ⅰ | PC-Ⅱ | PC-Ⅲ | PC-Ⅳ | PC-Ⅴ |
|---|---|---|---|---|---|---|
| BDS-3 | 11 | (0,0,-1,1,0) | (1,-1,0,0,0) | (0,0,0,-1,1) | (0,1,2,0,-3) | (1,0,0,0,0)(2,2,-3,0,0) |
| 12 | (1,-1,0,0,0) | (0,0,-1,0,1) | (0,1,2,0,-3) | |||
| 13 | (1,-1,0,0,0) | (0,0,0,-1,1) | (0,1,1,1,-3) | |||
| 14 | (0,0,-1,0,1) | (0,1,1,1,-3) | (1,-1,-1,0,1) | |||
| Galileo | 15 | (0,-1,0,1,0) | (0,0,1,-1,0) | (1,1,-1,1,-2) | (1,2,0,0,-3) | (1,0,0,0,0)(4,-2,0,-1,0) |
| 16 | (0,0,-1,0,1) | (1,1,1,0,-3) | (1,1,-1,1,-2) | |||
| 17 | (0,-1,1,0,0) | (0,0,-1,0,1) | (1,1,0,1,-3) | (1,1,0,0,-2) |
Tab. 14
Comparison of ambiguity fixing success rates for BDS-3 PCAR under different schemes"
| 数据集 | 方案 | PC-Ⅰ | PC-Ⅱ | PC-Ⅲ | PC-Ⅳ | BF | IR |
|---|---|---|---|---|---|---|---|
| A | 11 | 100 | 100 | 100 | 100 | 99.51 | 99.55 |
| 12 | 100 | 100 | 100 | 100 | 99.51 | 99.55 | |
| 13 | 100 | 100 | 100 | 100 | 99.51 | 99.55 | |
| 14 | 100 | 100 | 100 | 100 | 99.51 | 99.55 | |
| B | 11 | 100 | 100 | 100 | 100 | 94.96 | 98.42 |
| 12 | 100 | 100 | 100 | 100 | 94.96 | 98.42 | |
| 13 | 100 | 100 | 100 | 100 | 94.96 | 98.42 | |
| 14 | 100 | 100 | 100 | 99.96 | 94.96 | 98.42 | |
| C | 11 | 100 | 100 | 100 | 99.88 | 82.71 | 86.82 |
| 12 | 100 | 100 | 100 | 99.92 | 82.71 | 86.98 | |
| 13 | 100 | 100 | 100 | 99.76 | 82.67 | 86.78 | |
| 14 | 100 | 100 | 99.88 | 99.36 | 82.71 | 86.82 |
Tab. 15
Comparison of ambiguity fixing success rates for Galileo PCAR under different schemes"
| 数据集 | 方案 | PC-Ⅰ | PC-Ⅱ | PC-Ⅲ | PC-Ⅳ | BF | IR |
|---|---|---|---|---|---|---|---|
| A | 15 | 100 | 100 | 100 | 100 | 99.97 | 100 |
| 16 | 100 | 100 | 99.97 | 100 | 99.97 | 100 | |
| 17 | 100 | 100 | 99.93 | 100 | 99.97 | 100 | |
| C | 15 | 100 | 100 | 99.29 | 99.40 | 86.94 | 90.15 |
| 16 | 100 | 100 | 99.18 | 99.86 | 86.94 | 90.07 | |
| 17 | 100 | 100 | 99.22 | 99.75 | 86.98 | 90.11 |
Tab. 16
Comparison of ambiguity fixing success rates for BDS-3/Galileo PCAR under different schemes"
| 数据集 | PC-Ⅰ | PC-Ⅱ | PC-Ⅲ | PC-Ⅳ | BF | IR |
|---|---|---|---|---|---|---|
| A | 100 | 100 | 100 | 100 | 99.93 | 99.97 |
| C | 100 | 100 | 100 | 99.86 | 97.29 | 98.30 |
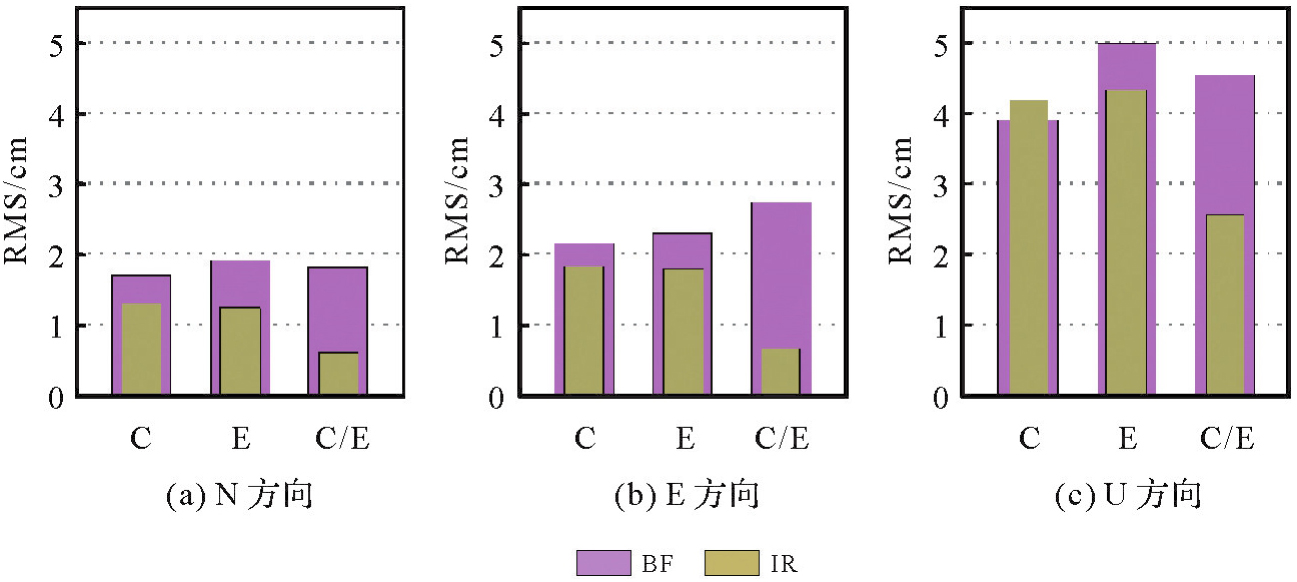
Fig. 3
Positioning root mean square of the NL combinations under three solution modes"
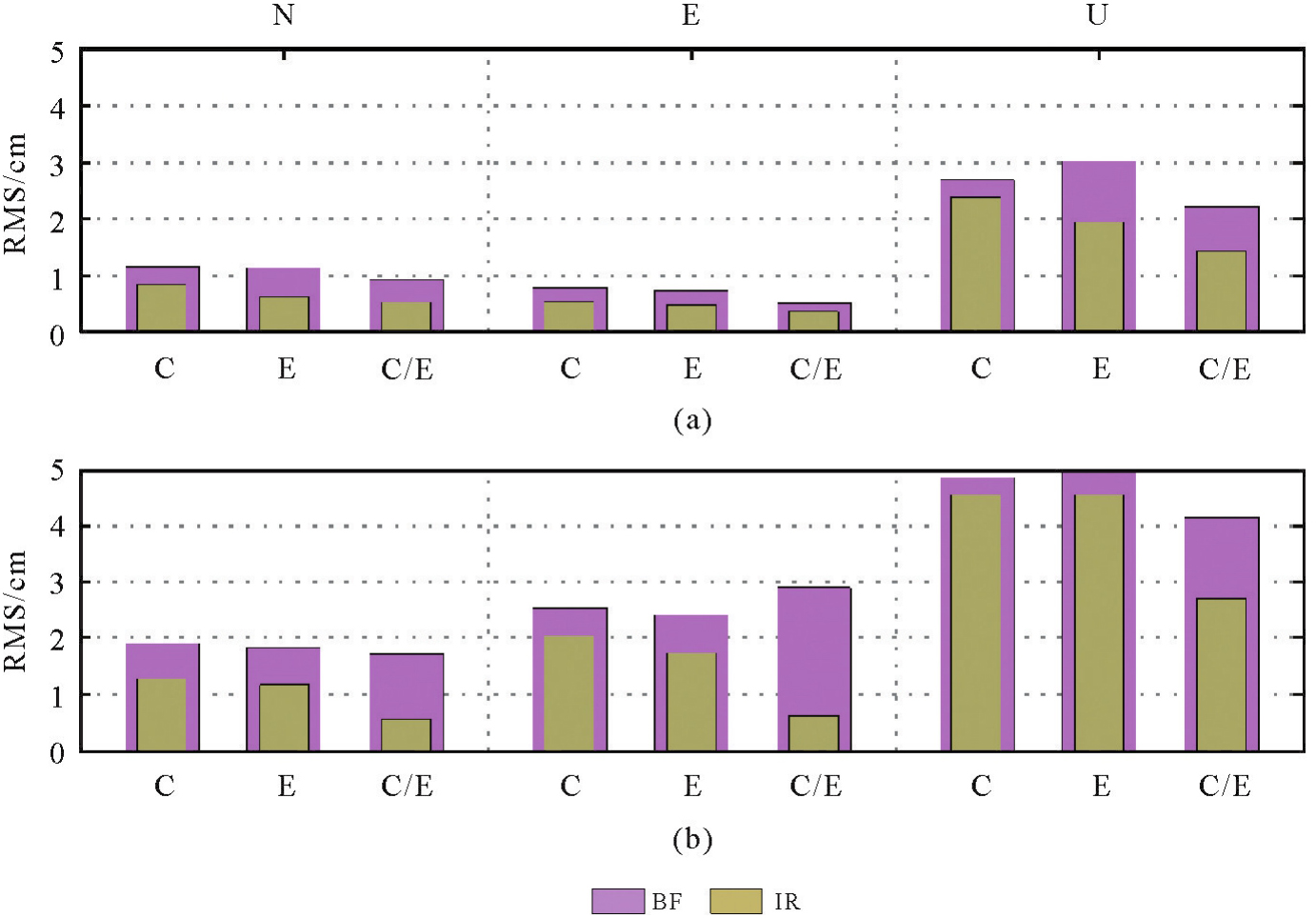
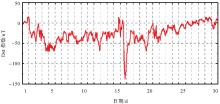
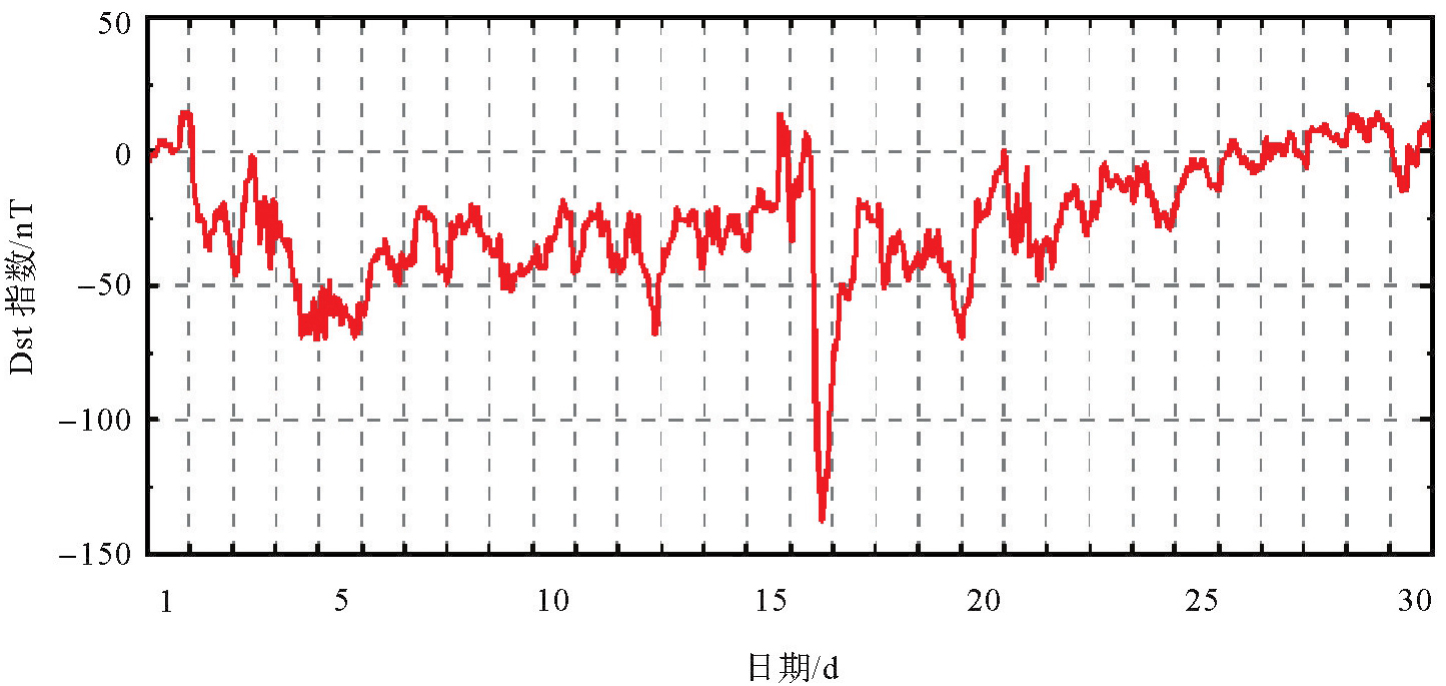
Fig. 4
The changing trend of the geomagnetic activity index over 30 consecutive days"
Tab. 17
Performance comparison of BDS-3/Galileo PCAR ambi-guity resolution under active ionospheric conditions"
| 数据集 | PC-Ⅰ | PC-Ⅱ | PC-Ⅲ | PC-Ⅳ | BF | IR |
|---|---|---|---|---|---|---|
| A | 100 | 100 | 99.55 | 100 | 99.90 | 100 |
| C | 100 | 100 | 96.42 | 98.72 | 99.76 | 99.83 |
Tab. 18
Three-dimensional positioning root mean square of BDS-3/Galileo PCAR in ionospheric active regions"
| 数值集 | BF/cm | IR/cm | 提升/(%) |
|---|---|---|---|
| A | 4.45 | 1.64 | 63.15 |
| C | 6.54 | 3.51 | 46.33 |
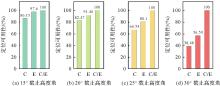
Fig. 5
Positioning availability of three modes in different cutoff elevation angles"
Tab. 19
Single-epoch ambiguity resolution success rates for the three modes across varying cut-off elevation angles"
| 窄巷组合 | 截止高度角 | BDS-3 | Galileo | BDS-3/Galileo |
|---|---|---|---|---|
| BF | 15° | 82.35 | 85.56 | 96.35 |
| 20° | 83.71 | 86.26 | 97.92 | |
| 25° | 82.15 | 86.43 | 96.74 | |
| 30° | 89.44 | 83.66 | 93.75 | |
| IR | 15° | 86.01 | 89.40 | 98.40 |
| 20° | 86.27 | 88.80 | 98.37 | |
| 25° | 86.38 | 89.42 | 98.68 | |
| 30° | 92.96 | 87.41 | 97.57 |
Tab. 20
The RMS values of NL positioning across varying cut-off elevation angles"
| 窄巷组合 | 截止高度角 | BDS-3 | Galileo | BDS-3/Galileo | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| N | E | U | N | E | U | N | E | U | ||
| BF | 15° | 1.88 | 2.48 | 4.51 | 1.74 | 2.26 | 5.06 | 1.75 | 2.99 | 4.18 |
| 20° | 1.87 | 2.40 | 4.37 | 1.82 | 2.34 | 4.98 | 1.79 | 2.85 | 4.49 | |
| 25° | 1.73 | 1.99 | 3.70 | 1.94 | 2.43 | 5.15 | 1.87 | 2.67 | 4.60 | |
| 30° | 1.23 | 1.73 | 3.08 | 2.09 | 2.14 | 4.78 | 1.84 | 2.49 | 4.87 | |
| IR | 15° | 1.30 | 1.97 | 4.41 | 1.12 | 1.75 | 4.40 | 0.61 | 0.81 | 2.78 |
| 20° | 1.18 | 1.84 | 4.14 | 1.10 | 1.79 | 4.49 | 0.55 | 0.56 | 2.55 | |
| 25° | 1.35 | 1.89 | 4.24 | 1.14 | 1.93 | 4.46 | 0.59 | 0.67 | 2.42 | |
| 30° | 1.36 | 1.58 | 3.88 | 1.54 | 1.63 | 3.94 | 0.68 | 0.79 | 2.64 | |

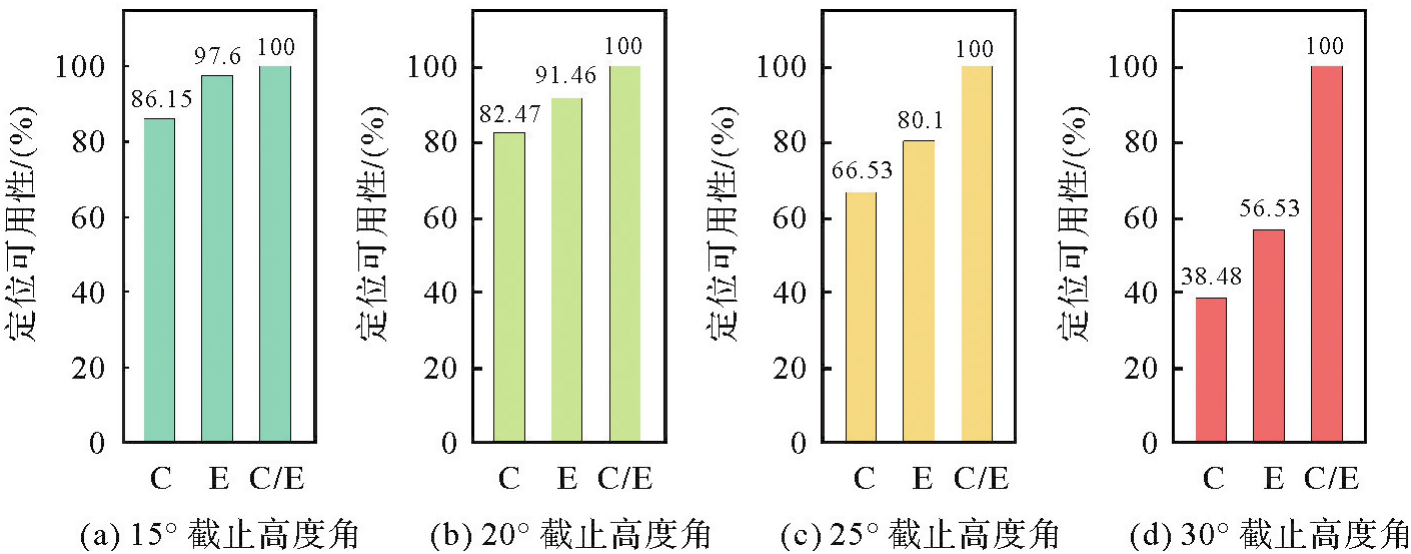
Fig. 6
Average root mean square of dataset C under four cut-off elevation angles"
| [1] |
张勤, 白正伟, 黄观文, 等. GNSS滑坡监测预警技术进展[J]. 测绘学报, 2022, 51(10): 1985-2000. DOI: .
doi: 10.11947/j.AGCS.2022.20220299 |
|
ZHANG Qin, BAI Zhengwei, HUANG Guanwen, et al. Review of GNSS landslide monitoring and early warning[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(10): 1985-2000. DOI: .
doi: 10.11947/j.AGCS.2022.20220299 |
|
| [2] | 王坚, 于亦龙, 柳根, 等. 超高层建筑变形GNSS多源融合监测方法及进展[J]. 武汉大学学报(信息科学版), 2025, 50(6): 1065-1076. |
| WANG Jian, YU Yilong, LIU Gen, et al. Method and progress for GNSS multi-source fusion deformation monitoring in super-tall buildings[J]. Geomatics and Information Science of Wuhan University, 2025, 50(6): 1065-1076. | |
| [3] | 刘善军, 吴立新, 毛亚纯, 等. 天-空-地协同的露天矿边坡智能监测技术及典型应用[J]. 煤炭学报, 2020, 45(6): 2265-2276. |
| LIU Shanjun, WU Lixin, MAO Yachun, et al. Spaceborne-airborne-ground collaborated intelligent monitoring on open-pit slope and its typical applications[J]. Journal of China Coal Society, 2020, 45(6): 2265-2276. | |
| [4] | DENG Chenlong, TANG Weiming, LIU Jingnan, et al. Reliable single-epoch ambiguity resolution for short baselines using combined GPS/BeiDou system[J]. GPS Solutions, 2014, 18(3): 375-386. |
| [5] | PARKINS A. Increasing GNSS RTK availability with a new single-epoch batch partial ambiguity resolution algorithm[J]. GPS Solutions, 2011, 15(4): 391-402. |
| [6] | HE Haibo, LI Jinlong, YANG Yuanxi, et al. Performance assessment of single- and dual-frequency BeiDou/GPS single-epoch kinematic positioning[J]. GPS Solutions, 2014, 18(3): 393-403. |
| [8] | VOLLATH U, BIRNBACH S, LANDAU L, et al. Analysis of three-carrier ambiguity resolution technique for precise relative positioning in GNSS-2[J]. Navigation, 1999, 46(1): 13-23. |
| [10] | HATCH R, JUNG J, ENGE P, et al. Civilian GPS: the benefits of three frequencies[J]. GPS Solutions, 2000, 3(4): 1-9. |
| [11] |
章浙涛, 李博峰, 何秀凤. 北斗三号多频相位模糊度无几何单历元固定方法[J]. 测绘学报, 2020, 49(9): 1139-1148. DOI: .
doi: 10.11947/j.AGCS.2020.20200325 |
|
ZHANG Zhetao, LI Bofeng, HE Xiufeng. Geometry-free single-epoch resolution of BDS-3 multi-frequency carrier ambi-guities[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(9): 1139-1148. DOI: .
doi: 10.11947/j.AGCS.2020.20200325 |
|
| [12] | GAO Yangjun, LÜ Zhiwei, ZHOU Pengjin, et al. Adaptive robust filtering algorithm for BDS medium and long baseline three carrier ambiguity resolution[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(2): 53-61. |
| [13] | ZHANG Xiaohong, HE Xiyang. Performance analysis of triple-frequency ambiguity resolution with BeiDou observations[J]. GPS Solutions, 2016, 20(2): 269-281. |
| [14] | FENG Yanming. GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals[J]. Journal of Geodesy, 2008, 82(12): 847-862. |
| [15] | FENG Y, LI B. A benefit of multiple carrier GNSS signals: regional scale network-based RTK with doubled inter-station distances[J]. Journal of Spatial Science, 2008, 53(2): 135-147. |
| [16] | 伍岳, 付小林, 李海军, 等. TCAR/MCAR方法在不同距离基线模糊度求解中的应用[J]. 武汉大学学报(信息科学版), 2007, 32(2): 172-175. |
| WU Yue, FU Xiaolin, LI Haijun, et al. Application of TCAR/MCAR method in different baseline ambiguity resolution[J]. Geomatics and Information Science of Wuhan University, 2007, 32(2): 172-175. | |
| [17] | 李博峰, 沈云中, 周泽波. 中长基线三频GNSS模糊度的快速算法[J]. 测绘学报, 2009, 38(4): 296-301. |
| LI Bofeng, SHEN Yunzhong, ZHOU Zebo. A new method for medium and long range three frequency GNSS rapid ambiguity resolution[J]. Acta Geodaetica et Cartographica Sinica, 2009, 38(4): 296-301. | |
| [18] | LI Bofeng, FENG Yanming, SHEN Yunzhong. Three carrier ambiguity resolution: distance-independent performance demonstrated using semi-generated triple frequency GPS signals[J]. GPS Solutions, 2010, 14(2): 177-184. |
| [19] | TANG Weiming, DENG Chenlong, SHI Chuang, et al. Triple-frequency carrier ambiguity resolution for BeiDou navigation satellite system[J]. GPS Solutions, 2014, 18(3): 335-344. |
| [20] | WANG K, KHODABANDEH A, TEUNISSEN P J G. Five-frequency Galileo long-baseline ambiguity resolution with multipath mitigation[J]. GPS Solutions, 2018, 22(3): 75. |
| [21] | YANG Yuanxi, MAO Yue, SUN Bijiao. Basic performance and future developments of BeiDou global navigation satellite system[J]. Satellite Navigation, 2020, 1(1): 273-304. |
| [22] | ZHANG Zhetao, LI Bofeng, HE Xiufeng, et al. Models, methods and assessment of four-frequency carrier ambiguity resolution for BeiDou-3 observations[J]. GPS Solutions, 2020, 24(4): 96. |
| [23] | 高旺, 潘树国, 刘力玮, 等. 基于BDS-3五频超宽巷/宽巷组合的中长基线单历元定位方法[J]. 中国惯性技术学报, 2021, 29(3): 293-299. |
| GAO Wang, PAN Shuguo, LIU Liwei, et al. Medium-long-baseline single-epoch positioning method based on BDS-3 five-frequency EWL/WL combinations[J]. Journal of Chinese Inertial Technology, 2021, 29(3): 293-299. | |
| [24] | WANG Jianchao, GAO Chengfa, PENG Zihan, et al. Research on single-epoch ambiguity resolution method based on BDS-3 ionosphere-reduced combinations[J]. Measurement, 2023, 221: 113566. |
| [25] | 高旺, 潘树国, 黄功文. 基于BDS-3和Galileo多频信号弱电离层组合的中长基线RTK定位方法[J]. 中国惯性技术学报, 2020, 28(6): 783-788. |
| GAO Wang, PAN Shuguo, HUANG Gongwen. Medium-baseline RTK positioning method based on BDS-3 and Galileo multi-frequency ionosphere-reduced combinations[J]. Journal of Chinese Inertial Technology, 2020, 28(6): 783-788. | |
| [26] | HOU Yanqing, LIU Xin, ZHANG Haoli, et al. Two-step success rate criterion strategy: a model- and data-driven partial ambiguity resolution method for medium-long baselines RTK[J]. GPS Solutions, 2022, 26(4): 134. |
| [27] | 李博峰, 苗维凯, 陈广鄂. 多频多模GNSS高精度定位关键技术与挑战[J]. 武汉大学学报(信息科学版), 2023, 48(11): 1769-1783. |
| LI Bofeng, MIAO Weikai, CHEN Guang'e. Key technologies and challenges of multi-frequency and multi-GNSS high-precision positioning[J]. Geomatics and Information Science of Wuhan University, 2023, 48(11): 1769-1783. | |
| [28] | 张旭, 杨杰. 融合电离层延迟改正与多频信号优化的全球导航卫星系统部分模糊度解算方法[J]. 电子与信息学报, 2025, 47(5): 1543-1553. |
| ZHANG Xu, YANG Jie. Global navigation satellite system partial ambiguity resolution method integrating ionospheric delay correction and multi-frequency signal optimization[J]. Journal of Electronics & Information Technology, 2025, 47(5): 1543-1553. | |
| [29] | RICHERT T, EL-SHEIMY N. Optimal linear combinations of triple frequency carrier phase data from future global navigation satellite systems[J]. GPS Solutions, 2007, 11(1): 11-19. |
| [30] | LI Bofeng, LI Zhen, ZHANG Zhiteng, et al. ERTK: extra-wide-lane RTK of triple-frequency GNSS signals[J]. Journal of Geodesy, 2017, 91(9): 1031-1047. |
| [31] | 姚一飞, 高井祥, 李增科, 等. 基于模糊度相关法的北斗三频载波单历元基线解算[J]. 武汉大学学报(信息科学版), 2016, 41(11): 1433-1439. |
| YAO Yifei, GAO Jingxiang, LI Zengke, et al. BeiDou triple-frequency carrier single-epoch ambiguity resolution based on ambiguity related method[J]. Geomatics and Information Science of Wuhan University, 2016, 41(11): 1433-1439. | |
| [32] | TEUNISSEN P J G, ODOLINSKI R, ODIJK D. Instantaneous BeiDou+GPS RTK positioning with high cut-off elevation angles[J]. Journal of Geodesy, 2014, 88(4): 335-350. |
| [1] | Jun LI, Huizhong ZHU, Zhiqiang LIU. An optimization method for ionospheric parameters in ambiguity resolution of BDS long-range reference station network [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(2): 221-232. |
| [2] | Bofeng LI, Long CHEN, Leitong YUAN. A high-precision deformation monitoring method with GNSS multi-baseline solutions [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(12): 2116-2128. |
| [3] | Jianghui GENG, Jihang LIN, Qiyuan ZHANG, Qiang WEN, Jing ZENG, Biao JIN. Phase clock/bias estimation for GNSS all-frequency undifferenced ambiguity resolution [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(12): 2254-2267. |
| [4] | HOU Pengyu, ZHANG Baocheng, LIU Teng, ZHA Jiuping. Regional PPP-RTK with CDMA+FDMA data at undifferenced and uncombined level [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(2): 183-194. |
| [5] | YUAN Yunbin, LIU Shuai, TAN Bingfeng. Modeling and effects analysis of GNSS precise point positioning ambiguity resolution based on the decoupled clock method [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(8): 1669-1679. |
| [6] | LU Liguo, MA Liye, LIU Wanke, WU Tangting, HU Weijian. CLAMBDA method with additional scaling factor for GNSS ambiguity resolution [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(11): 2273-2284. |
| [7] | ZENG Tian, SUI Lifen, RUAN Rengui, JIA Xiaolin, XIAO Guorui. GPS/BDS/Galileo precise orbit determination using triple-frequency uncombined observation model [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(2): 169-180. |
| [8] | ZHANG Zhetao, LI Bofeng, HE Xiufeng. Geometry-free single-epoch resolution of BDS-3 multi-frequency carrier ambi-guities [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(9): 1139-1148. |
| [9] | DU Zhenqiang, CHAI Hongzhou, XIANG Minzhi, YIN Xiao, LIU Chunhe. Unified ambiguity resolution method based on three PPP Models [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(7): 824-832. |
| [10] | ZENG Tian, SUI Lifen, RUAN Rengui, JIA Xiaolin, FENG Laiping. Satellite precise orbit determination with ionospheric-free strategy using triple-frequency observations [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(10): 1275-1284. |
| [11] | GENG Jianghui, CHANG Hua, GUO Jiang, LI Guangcai, WEI Na. Three multi-frequency and multi-system GNSS high-precision point positioning methods and their performance in complex urban environment [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(1): 1-13. |
| [12] | LÜ Daqian, ZENG Fangling, OUYANG Xiaofeng, YU Heli. Time and frequency transfer based on modified integer phase clock method [J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(7): 889-897. |
| [13] | WU Zemin, BIAN Shaofeng. GNSS Partial Ambiguity Resolution Based on Posterior Probability and Minimum Squares Error Solution [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(S0): 54-60. |
| [14] | JIA Chun, ZHAO Lin, LI Liang, CHENG Jianhua, LI Hui. Ionosphere-free Multi-carrier Ambiguity Resolution Method Based on Ambiguity Linear Constraints [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(7): 930-939. |
| [15] | SUI Xin, XU Aigong, HAO Yushi, WANG Changqiang. Real-time Estimation Method for GLONASS Phase Inter-frequency Bias Based on Particle Swarm Optimization [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(5): 584-591. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||