

Acta Geodaetica et Cartographica Sinica ›› 2025, Vol. 54 ›› Issue (1): 64-74.doi: 10.11947/j.AGCS.2025.20240122
• Photogrammetry and Remote Sensing • Previous Articles Next Articles
Yongjun ZHANG1,2( ), Changjun ZHU1, Siyuan ZOU1, Xinyi LIU1, Qingzhou MAO1, Yi WAN1,2()
), Changjun ZHU1, Siyuan ZOU1, Xinyi LIU1, Qingzhou MAO1, Yi WAN1,2()
Received:2024-03-28
Revised:2024-12-10
Online:2025-02-17
Published:2025-02-17
Contact:
Yi WAN
E-mail:zhangyj@whu.edu.cn;yi.wan@whu.edu.cn
About author:ZHANG Yongjun (1975—), male, professor, majors in aerial and space photogrammetry, integration of image and point cloud, and 3D city model reconstruction. E-mail: zhangyj@whu.edu.cn
Supported by:CLC Number:
Yongjun ZHANG, Changjun ZHU, Siyuan ZOU, Xinyi LIU, Qingzhou MAO, Yi WAN. Registration of aerial images and LiDAR point clouds based on distance field and plane constraints[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 64-74.
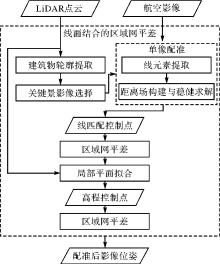
Fig. 1
Flowchart of DFPC registration method"
Fig. 2
Single image registration based on line distance field (distance field rendered in pseudo-color from blue to yellow by value from low to high)"
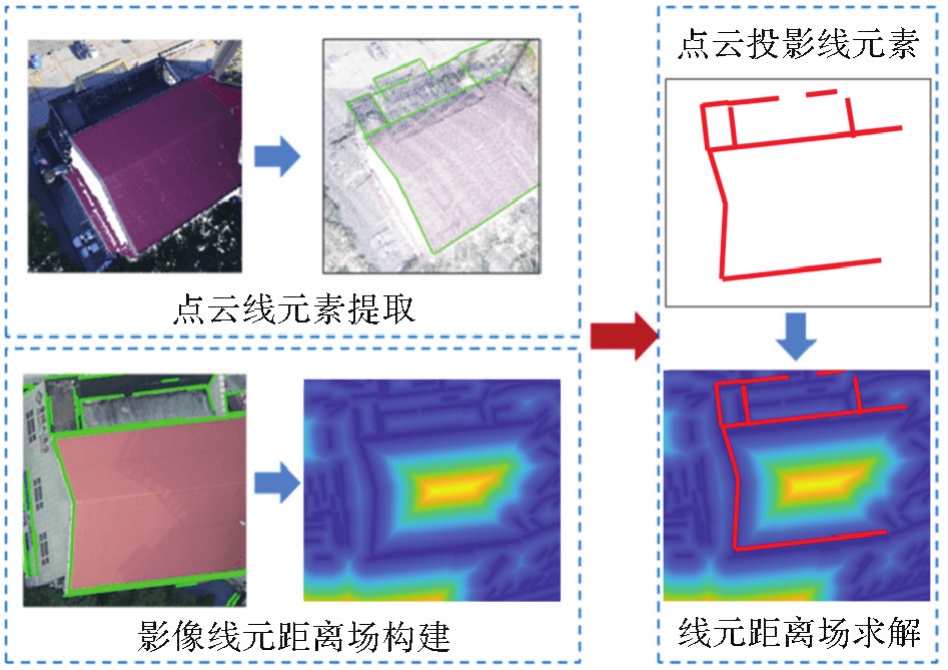
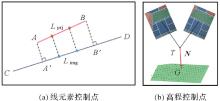
Fig. 3
Ground control point generation"
Tab. 1
Detailed information of datasets"
| 数据集 | 数据集Ⅰ | 数据集Ⅱ |
|---|---|---|
| 测区位置 | 浙江省宁波市 | 武汉大学校园 |
| 影像类型 | 航空多视倾斜影像 | 航空下视影像 |
| 影像数量 | 1188 | 50 |
| 相机数量 | 5 | 1 |
| 航高/m | 900 | 250 |
| 影像地面分辨率/m | 0.051 | 0.067 |
| LiDAR点云平均点间距/m | 0.28 | 0.20 |
Fig. 4
LiDAR point cloud and image distribution (LiDAR point cloud rendered in pseudo-color from blue to red by elevation from low to high)"
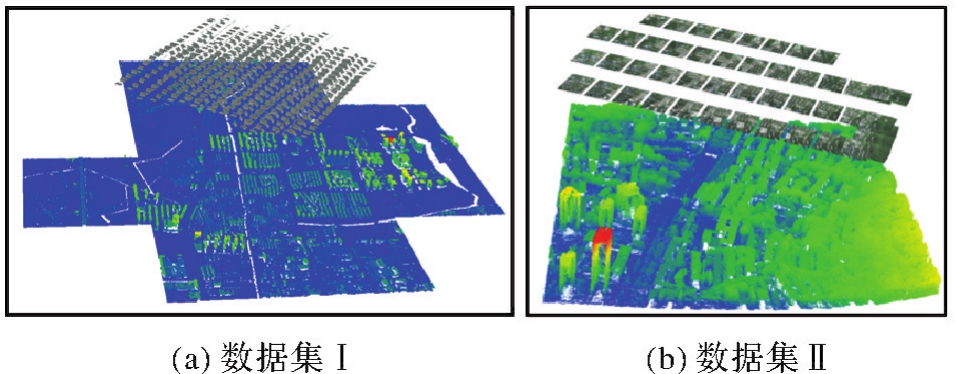
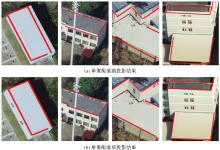
Fig. 5
Comparison of point cloud line element projection results before and after single image registration in Ningbo dataset"

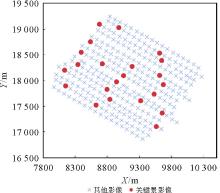
Fig. 6
Key images distribution"
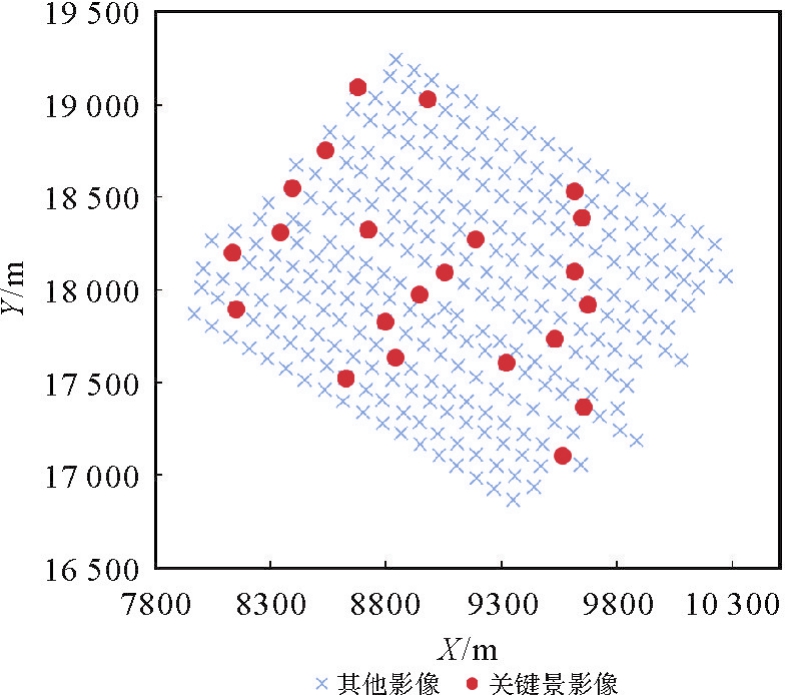
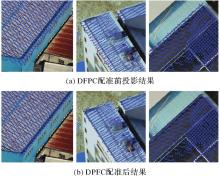
Fig. 7
Comparison of projection results before and after DFPC registration on the Ningbo dataset"


Fig. 8
Check points residuals before and after registration with the DFPC method for Ningbo dataset"

Tab. 2
Registration accuracy for DFPC method in Ningbo dataset"
| 配准状态 | dXY/m | dZ/m |
|---|---|---|
| 配准前 | 0.75 | 0.98 |
| DFPC法配准后 | 0.16 | 0.19 |

Fig. 9
Check points residuals after registration with different methods on Wuhan University dataset"

Tab. 3
Registration accuracy and efficiency comparison between with DFPC with other methods on Wuhan University dataset"
| 配准方法 | dXY/m | dZ/m | 配准用时/min | 存储开销 |
|---|---|---|---|---|
| HPMEC | 0.31 | 1.04 | 137 | 11.9 GB |
| ICP | 0.27 | 0.32 | 63 | 6.2 GB |
| DFPC | 0.06 | 0.16 | 12 | 37 MB |
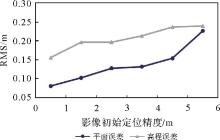
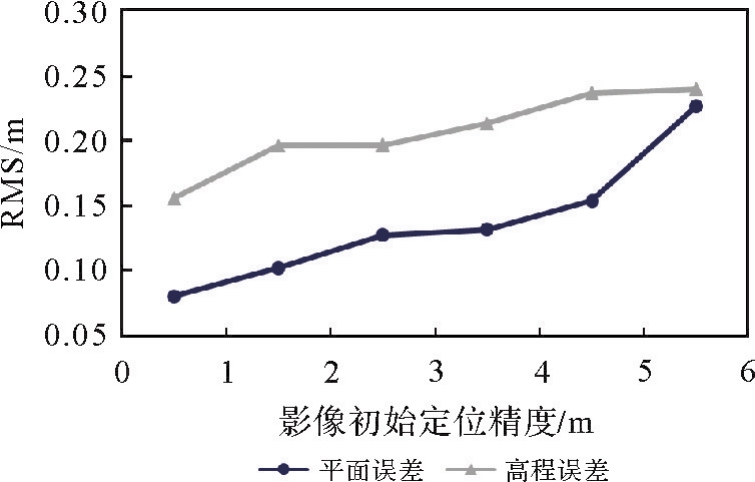
Fig. 10
The influence of the initial positioning accuracy of the image on the registration accuracy"
| [1] | ZHU Bai, YE Yuanxin, ZHOU Liang, et al. Robust registration of aerial images and LiDAR data using spatial constraints and Gabor structural features[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2021, 181: 129-147. |
| [2] | JONASSEN V O, KJØRSVIK N S, GJEVESTAD J G O. Scalable hybrid adjustment of images and LiDAR point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2023, 202: 652-662. |
| [3] | ZHANG Yongjun, XIONG Xiaodong, WANG Mengqiu, et al. A fast aerial image matching method using airborne LiDAR point cloud and POS data[J]. Journal of Geodesy and Geoinformation Science, 2019, 2(1): 26-36. |
| [4] | ZHANG Yongjun, ZOU Siyuan, LIU Xinyi, et al. LiDAR-guided stereo matching with a spatial consistency constraint[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2022, 183: 164-177. |
| [5] | ZOU Siyuan, LIU Xinyi, HUANG Xu, et al. Edge-preserving stereo matching using LiDAR points and image line features[J]. IEEE Geoscience and Remote Sensing Letters, 2023, 20: 3239030. |
| [6] | ZHANG Lei, LI Xu, TANG Kaichen, et al. FS-Net: LiDAR-camera fusion with matched scale for 3D object detection in autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(11): 12154-12165. |
| [7] | ZHAO Lin, ZHOU Hui, ZHU Xinge, et al. LIF-seg: LiDAR and camera image fusion for 3D LiDAR semantic segmentation[J]. IEEE Transactions on Multimedia, 2024, 26: 1158-1168. |
| [8] | LI X, ZHANG X, NIU X, et al. Progress and achievements of multi-sensor fusion navigation in China during 2019—2023[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 102-114. |
| [9] | BALIC N, WEINACKER H, KOCH B. Generation of mosaiced digital true orthophotographs from multispectral and LiDAR data[J]. International Journal of Remote Sensing, 2007, 28(16): 3679-3688. |
| [10] |
陈首彬. 激光LiDAR/视觉融合的SLAM(LV-SLAM)关键技术研究[J]. 测绘学报, 2023, 52(1): 169. DOI:.
doi: 10.11947/j.AGCS.2023.20210184 |
|
CHEN Shoubin. Research on SLAM based on LiDAR/visual fusion (LV-SLAM)[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(1): 169. DOI:.
doi: 10.11947/j.AGCS.2023.20210184 |
|
| [11] | REN Siyu, ZENG Yiming, HOU Junhui, et al. CorrI2P: deep image-to-point cloud registration via dense correspondence[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2023, 33(3): 1198-1208. |
| [12] | WANG Yanjun, LI Shaochun, WANG Mengjie, et al. A simple deep learning network for classification of 3D mobile LiDAR point clouds[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(3): 49-59. |
| [13] | LI Jiaxin, HEE LEE G. DeepI2P: image-to-point cloud registration via deep classification[C]//Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville: IEEE, 2021. |
| [14] | ESLAMI M, SAADATSERESHT M. A new tie plane-based method for fine registration of imagery and point cloud dataset[J]. Canadian Journal of Remote Sensing, 2020, 46(3): 295-312. |
| [15] | YANG Bisheng, CHEN Chi. Automatic registration of UAV-borne sequent images and LiDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 101: 262-274. |
| [16] | PANDEY G, MCBRIDE J R, SAVARESE S, et al. Automatic extrinsic calibration of vision and LiDAR by maximizing mutual information[J]. Journal of Field Robotics, 2015, 32(5): 696-722. |
| [17] | SUN Shaohui, SAVALGGIO C. Complex building roof detection and strict description from LiDAR data and orthorectified aerial imagery[C]//Proceedings of 2012 IEEE International Geoscience and Remote Sensing Symposium. Munich: IEEE, 2012. |
| [18] | TEO T A, HUANG S H. Automatic co-registration of optical satellite images and airborne LiDAR data using relative and absolute orientations[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2013, 6(5): 2229-2237. |
| [19] | NAIMAEE R, SAADATSERESHT M, OMIDALIZARANDI M. Automatic extraction of control points from 3D LiDAR mobile mapping and UAV imagery for aerial triangulation[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2023,: 581-588. |
| [20] | BARSAI G, YILMAZ A, NAGARAJAN S, et al. Registration of images to LiDAR and GIS data without establishing explicit correspondences[J]. Photogrammetric Engineering & Remote Sensing, 2017, 83(10): 705-716. |
| [21] | ZITOVÁ B, FLUSSER J. Image registration methods: a survey[J]. Image and Vision Computing, 2003, 21(11): 977-1000. |
| [22] | WONG A, ORCHARD J. Efficient FFT-accelerated approach to invariant optical-LiDAR registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(11): 3917-3925. |
| [23] | MASTIN A, KEPNER J, FISHER J. Automatic registration of LIDAR and optical images of urban scenes[C]//Proceedings of 2009 IEEE Conference on Computer Vision and Pattern Recognition. Miami: IEEE, 2009. |
| [24] | PARMEHR E G, FRASER C S, ZHANG C, et al. Automatic registration of optical imagery with 3D LiDAR data using statistical similarity[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 88: 28-40. |
| [25] | BESL P J, MCKAY N D. Method for registration of 3D shapes[C]//Proceedings of 1992 Sensor Fusion IV: Control Paradigms and Data Structures. Boston: SPIE, 1992. |
| [26] | LI Jiayuan, HU Qingwu, AI Mingyao. RIFT: multi-modal image matching based on radiation-variation insensitive feature transform[J]. IEEE Transactions on Image Processing, 2020, 29: 3296-3310. |
| [27] | 刘伟玉, 万一, 张永军, 等. 基于相位均匀卷积的LiDAR深度图与航空影像高效匹配方法[J]. 武汉大学学报(信息科学版), 2022, 47(8): 1309-1317. |
| LIU Weiyu, WAN Yi, ZHANG Yongjun, et al. An efficient matching method of LiDAR depth map and aerial image based on phase mean convolution[J]. Geomatics and Information Science of Wuhan University, 2022, 47(8): 1309-1317. | |
| [28] | 张永军, 洪玮辰, 万一. 利用距离变换模型进行卫星影像与激光点云精配准[J]. 武汉大学学报(信息科学版), 2023, 48(3): 339-348. |
| ZHANG Yongjun, HONG Weichen, WAN Yi. Precise registration of satellite images and laser point clouds using distance transformation model[J]. Geomatics and Information Science of Wuhan University, 2023, 48(3): 339-348. | |
| [29] | WAN Y, ZHANG Y, WANG G, et al. Accurate registration of aerial images and als-point cloud via automated junction matching and planar constraints[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2020(2): 79-86. |
| [30] | HUANG Rongyong, ZHENG Shunyi, HU Kun. Registration of aerial optical images with LiDAR data using the closest point principle and collinearity equations[J]. Sensors, 2018, 18(6): 1770. |
| [31] | VON GIOI R G, JAKUBOWICZ J, MOREL J M, et al. LSD: a fast line segment detector with a false detection control[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(4): 722-732. |
| [32] | 张永军, 熊小东, 沈翔. 城区机载LiDAR数据与航空影像的自动配准[J]. 遥感学报, 2012, 16(3): 579-595. |
| ZHANG Yongjun, XIONG Xiaodong, SHEN Xiang. Automatic registration of urban aerial imagery with airborne LiDAR data[J]. Journal of Remote Sensing, 2012, 16(3): 579-595. | |
| [33] | LI J, ZHANG Y, HU Q. Robust estimation in robot vision and photogrammetry: a new model and its applications[J]. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2021, 51(1): 137-144. |
| [1] | Xing ZHANG, Zhanpeng HUANG, Qingquan LI, Baoding ZHOU, Qipei LI. 3D tunnel mapping method combining registration compensation and spatial constraint [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(2): 297-307. |
| [2] | XIANG Deliang, DING Huaiyue, GUAN Dongdong, CHENG Jianda, SUN Xiaokun. PolSAR image registration combining polarization whitening filtering and SimSD-CapsuleNet [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(3): 450-462. |
| [3] | Jiaxing LIU, Yuchun HUANG, Wenxuan SHI, Xi YE, He YANG. Road markings extraction considering topological structure [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(11): 2213-2227. |
| [4] | LIAN Renbao, ZHANG Zhenmin, LIAO Yipeng, ZOU Changzhong, HUANG Liqin. A quick road centreline extraction method from remote sensing images combining with geodesic distance field and curve smoothing [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(8): 1317-1329. |
| [5] | Lü Kefeng, ZHANG Yongsheng, YU Ying, MIN Jie. Instance object localization based on semantic information and geo-registration [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(8): 1375-1386. |
| [6] | ZHANG Guangyun, HAN Yi, ZHANG Rongting, LI Mingfeng, JI Wenlai. A spatial consistency-based point cloud registration method for the same platform [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(5): 789-797. |
| [7] | LI Haoran, MEI Tiancan, GAO Zhi. 3D face reconstruction based on global ICP and improved Poisson [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(3): 454-463. |
| [8] | ZHANG Yongxian, MA Guorui, ZI Shuanjin, MEN Hang. Multi-source remote sensing image bidirectional consistent registration based on learning feature [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(11): 1906-1916. |
| [9] | LI Jiayuan, ZHANG Yongjun, AI Mingyao, HU Qingwu. Scale-adaptive Cauchy robust estimation based on progressive optimization and its applications [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(1): 61-70. |
| [10] | ZHANG Ning, JIN Shaohua, BIAN Gang, XIAO Fumin. An iterative and adaptive registration method for multi-beam and side-scan sonar images [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(9): 1951-1958. |
| [11] | LI Jiatian, YANG Ruchun, YAO Yanji, HE Rixing, A Xiaohui, LÜ Shaoyun. Semantic segmentation of aerial image based on semi-supervised network with multi-scale shared coding [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(11): 2355-2364. |
| [12] | LI Pei, JIANG Gang, MA Qianli, XUE Wanfeng, YANG Weihua. A hybrid model combining tensor and mutual information for multi-modal image registration [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(7): 916-929. |
| [13] | MA Zhangfeng, JIANG Mi, DING Qixuan. Time-series co-registration for Sentinel-1 TOPS SAR Data [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(5): 634-640. |
| [14] | LI Shuaixin, LI Jiuren, TIAN Bin, CHEN Long, WANG Li, LI Guangyun. A laser SLAM method for unmanned vehicles in point cloud degenerated tunnel environments [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1487-1499. |
| [15] | SUN Xiliang, GUAN Hongcan, SU Yanjun, XU Guangcai, GUO Qinghua. A tightly coupled SLAM method for precise urban mapping [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1585-1593. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||