

Acta Geodaetica et Cartographica Sinica ›› 2024, Vol. 53 ›› Issue (11): 2213-2227.doi: 10.11947/j.AGCS.2024.20230289
• Photogrammetry and Remote Sensing • Previous Articles Next Articles
Jiaxing LIU1( ), Yuchun HUANG1(), Wenxuan SHI1, Xi YE2, He YANG3
), Yuchun HUANG1(), Wenxuan SHI1, Xi YE2, He YANG3
Received:2023-07-16
Online:2024-12-13
Published:2024-12-13
Contact:
Yuchun HUANG
E-mail:liujiaxing@whu.edu.cn;hycwhu@whu.edu.cn
About author:LIU Jiaxing (1997—), male, master, majors in photogrammetry and remote sensing. E-mail: liujiaxing@whu.edu.cn
Supported by:CLC Number:
Jiaxing LIU, Yuchun HUANG, Wenxuan SHI, Xi YE, He YANG. Road markings extraction considering topological structure[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(11): 2213-2227.
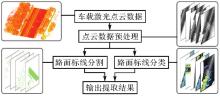
Fig.1
Data processing flowchart in this paper"
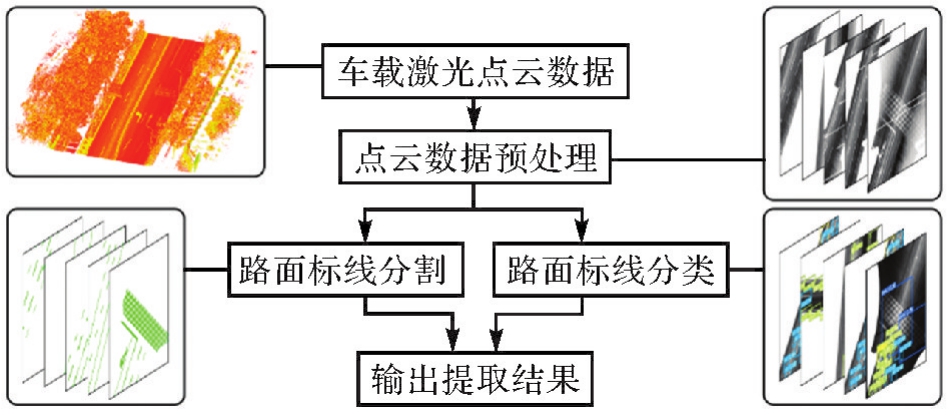

Fig.2
Structure of the intensity correction network"
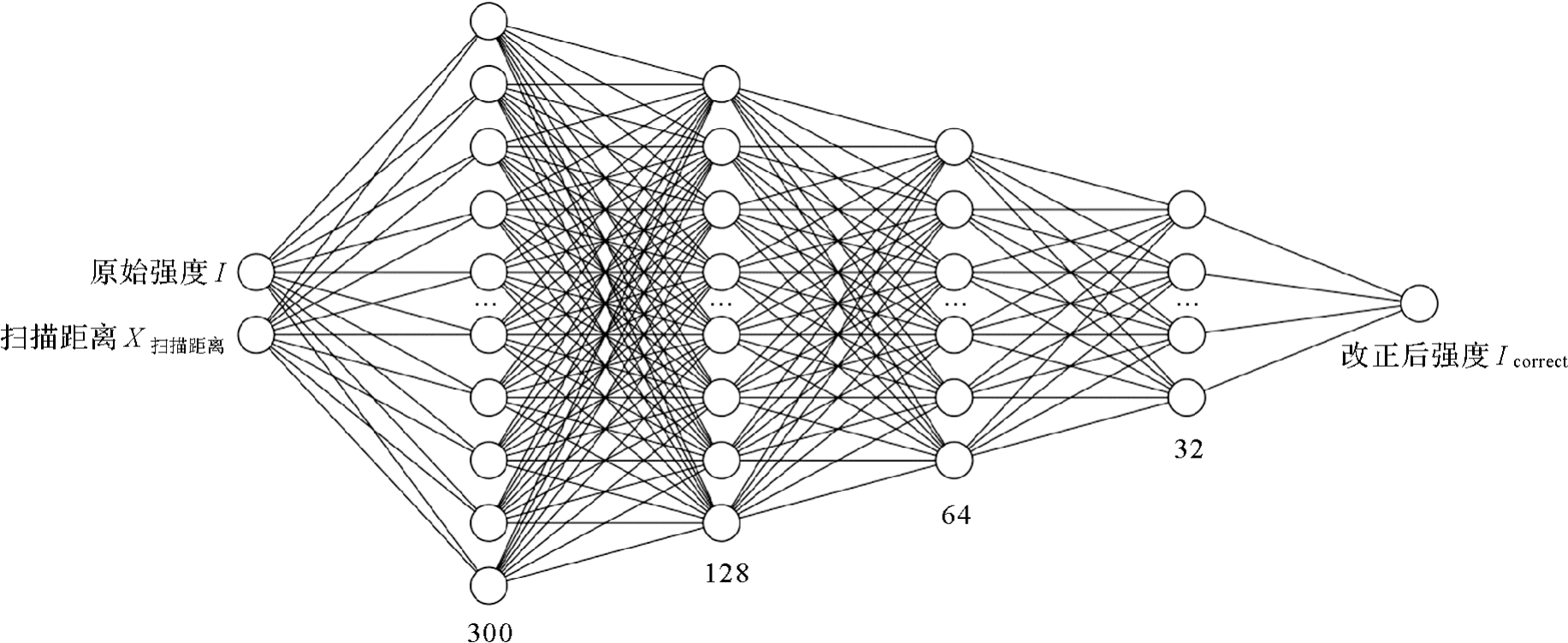
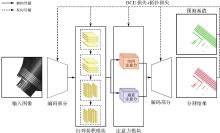
Fig.3
The structure of the LST-Net"
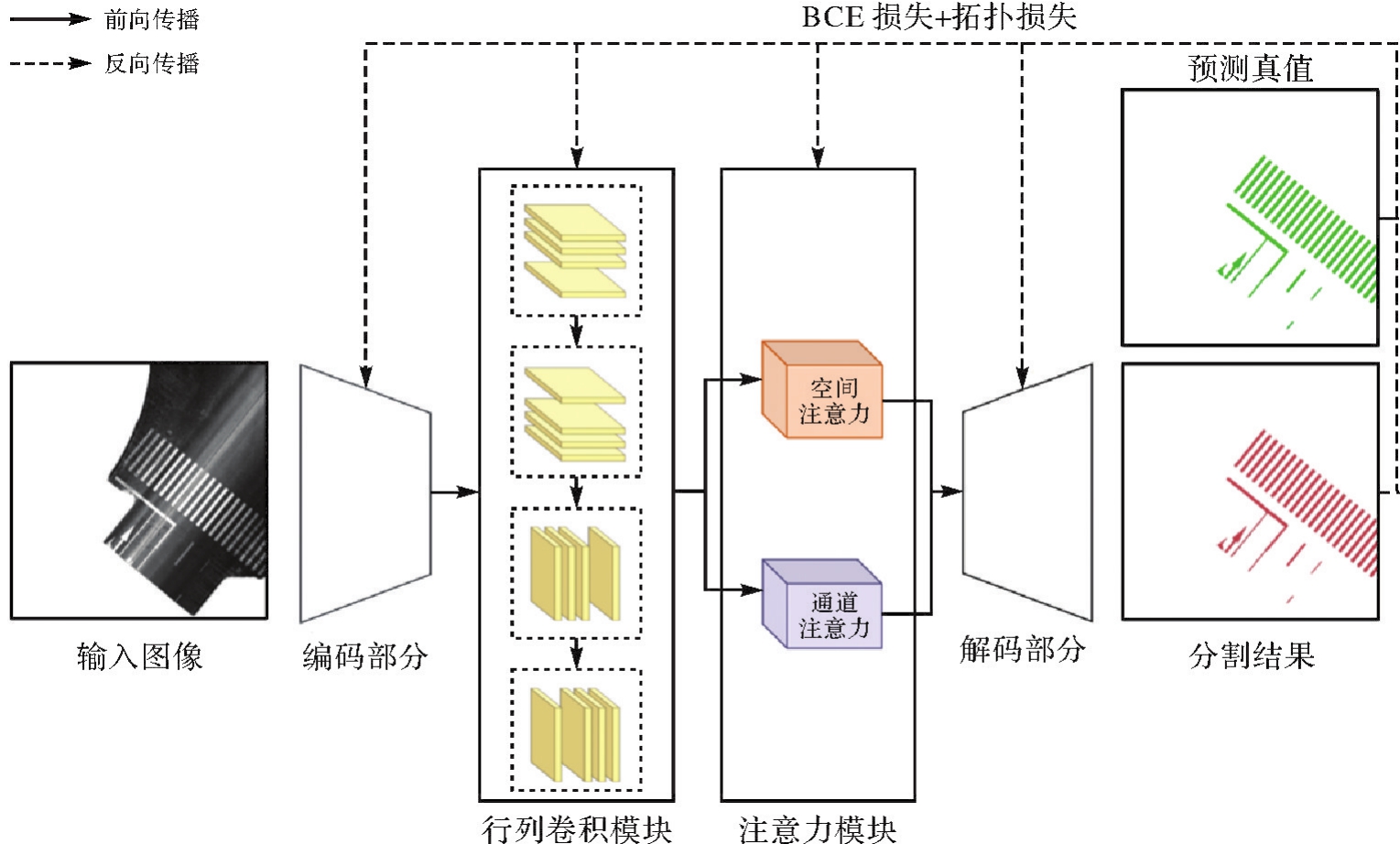
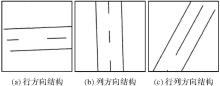
Fig.4
Illustration of road markings row-column structure"
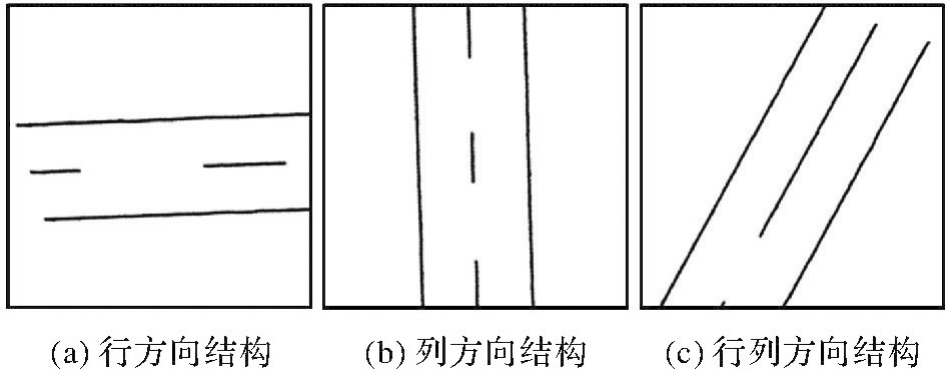

Fig.5
The structure of row-column convolution module"
Fig.6
Illustration of long-distance dependence of road markings"

Fig.7
The structure of attention module"
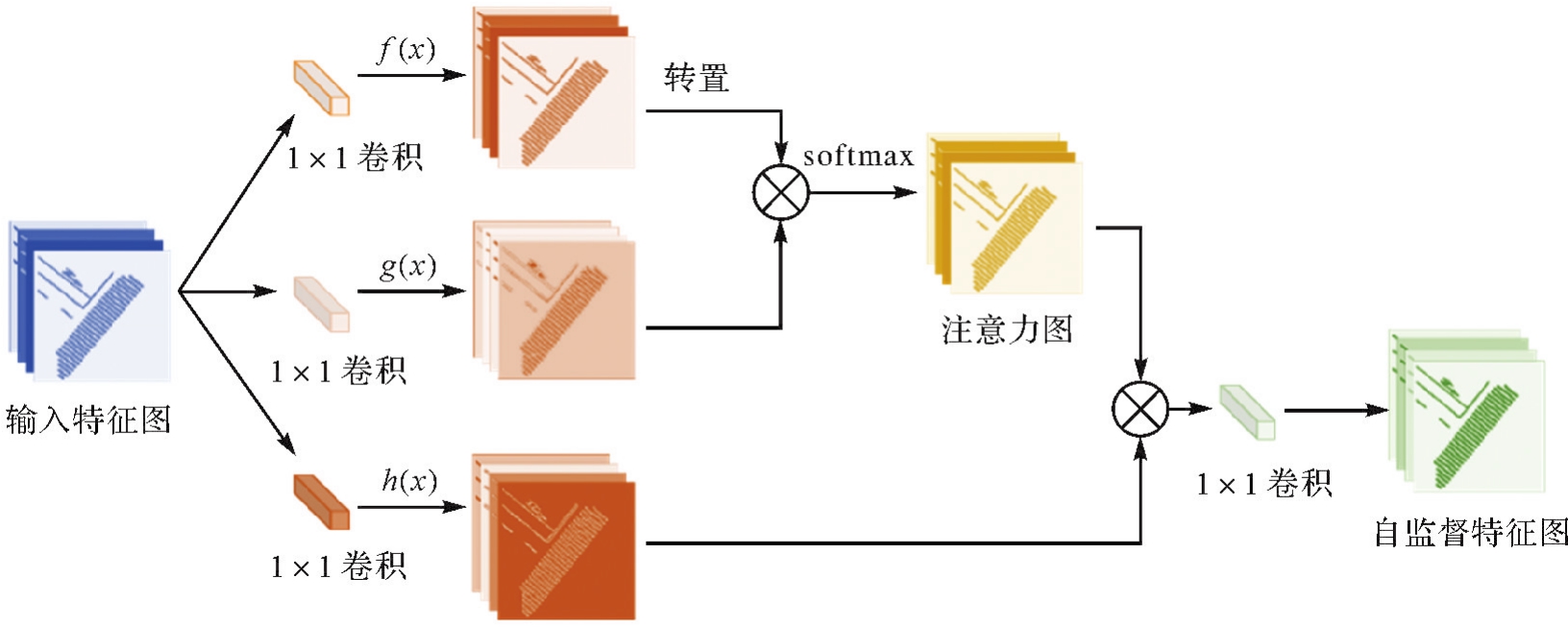
Fig.8
Illustration of road markings topology structure loss"

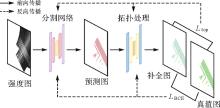
Fig.9
Flowchart of topological processing and penalty training for the segmentation network in this paper"
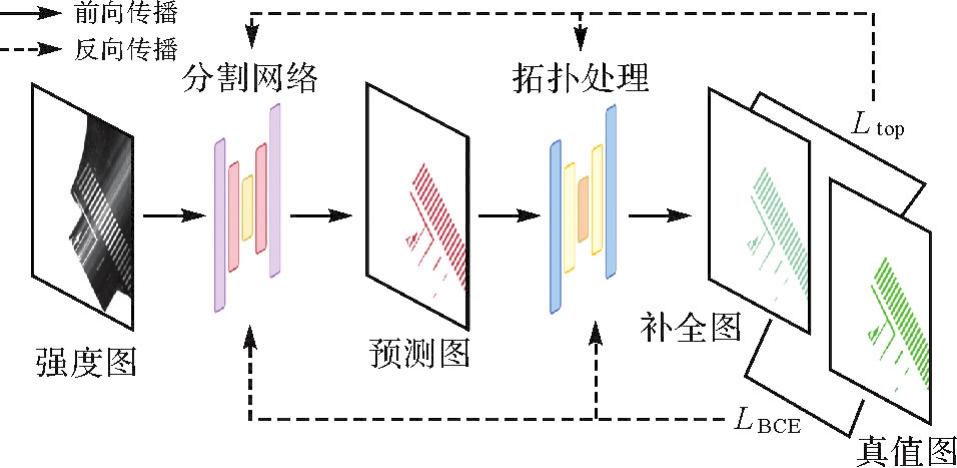

Fig.10
Schematic diagram of topology processing network completion process"
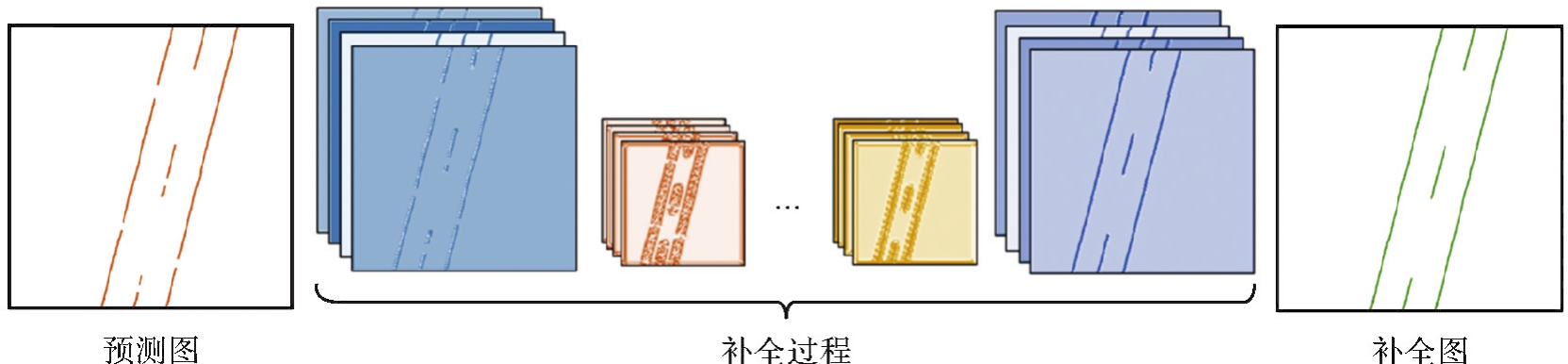

Fig.11
Schematic diagram of Ltop loss function calculation in this paper"
Tab.1
Description of the experimental datasets"
| 路段名称 | 数据总量 | 训练集 | 测试集 |
|---|---|---|---|
| 路段1 | 1856 | 1299 | 557 |
| 路段2 | 2560 | 1792 | 768 |
| 路段3 | 4800 | 3360 | 1440 |

Fig.12
Examples of experimental results of the road markings extraction using the method proposed this paper"
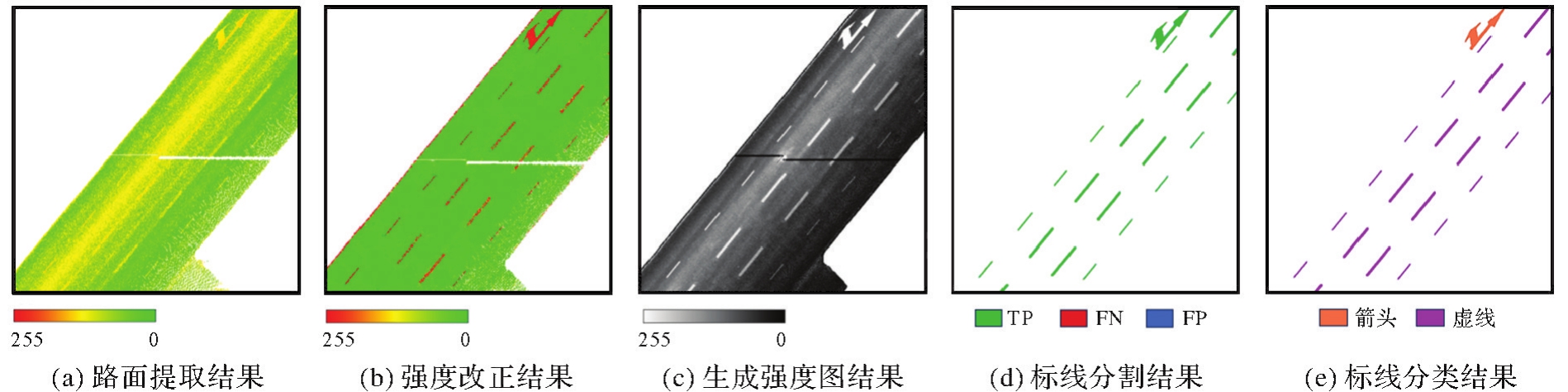

Fig.13
The results of road markings extraction using the method proposed in this paper"
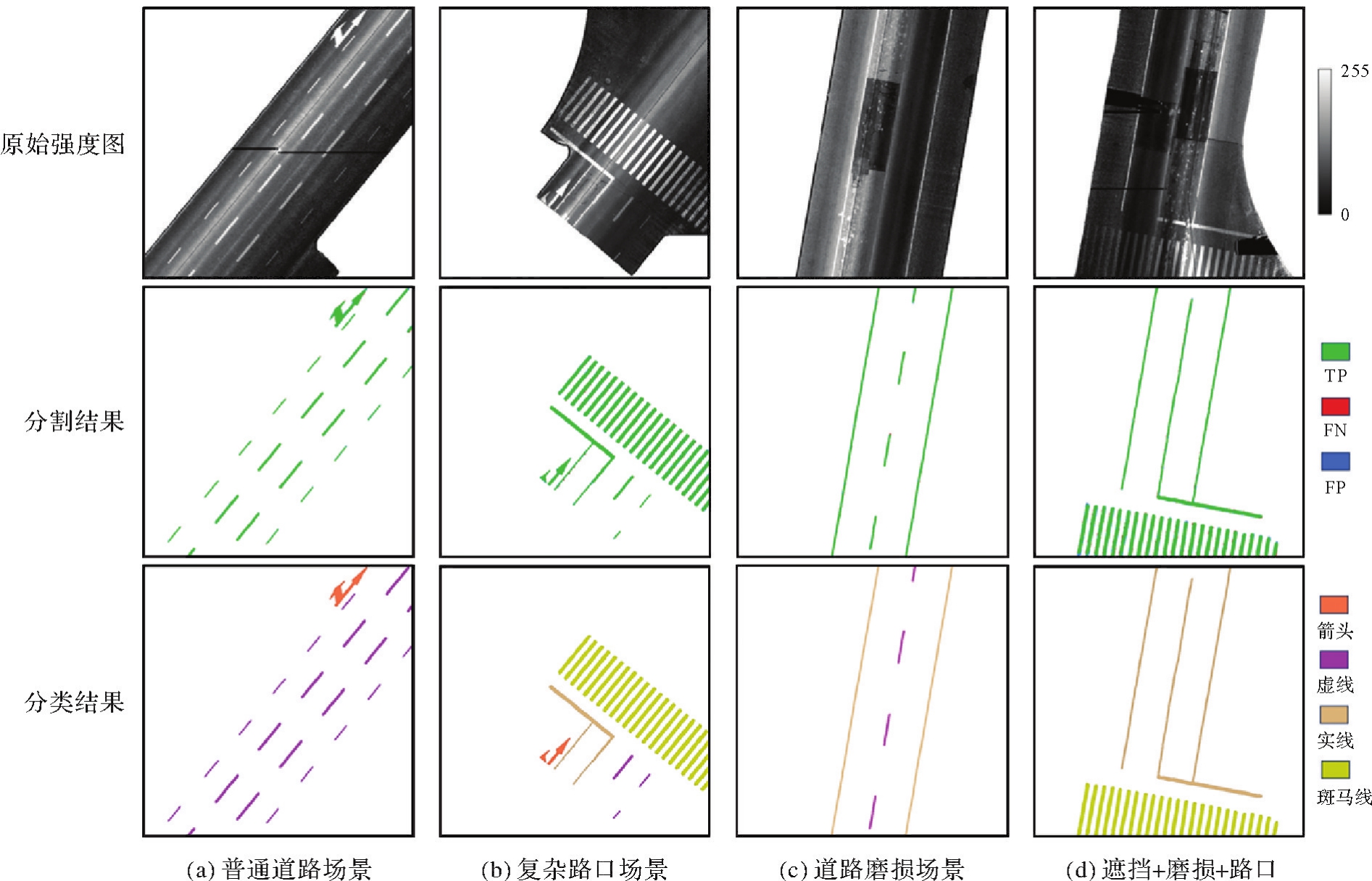
Fig.14
The comparison before and after intensity correction"
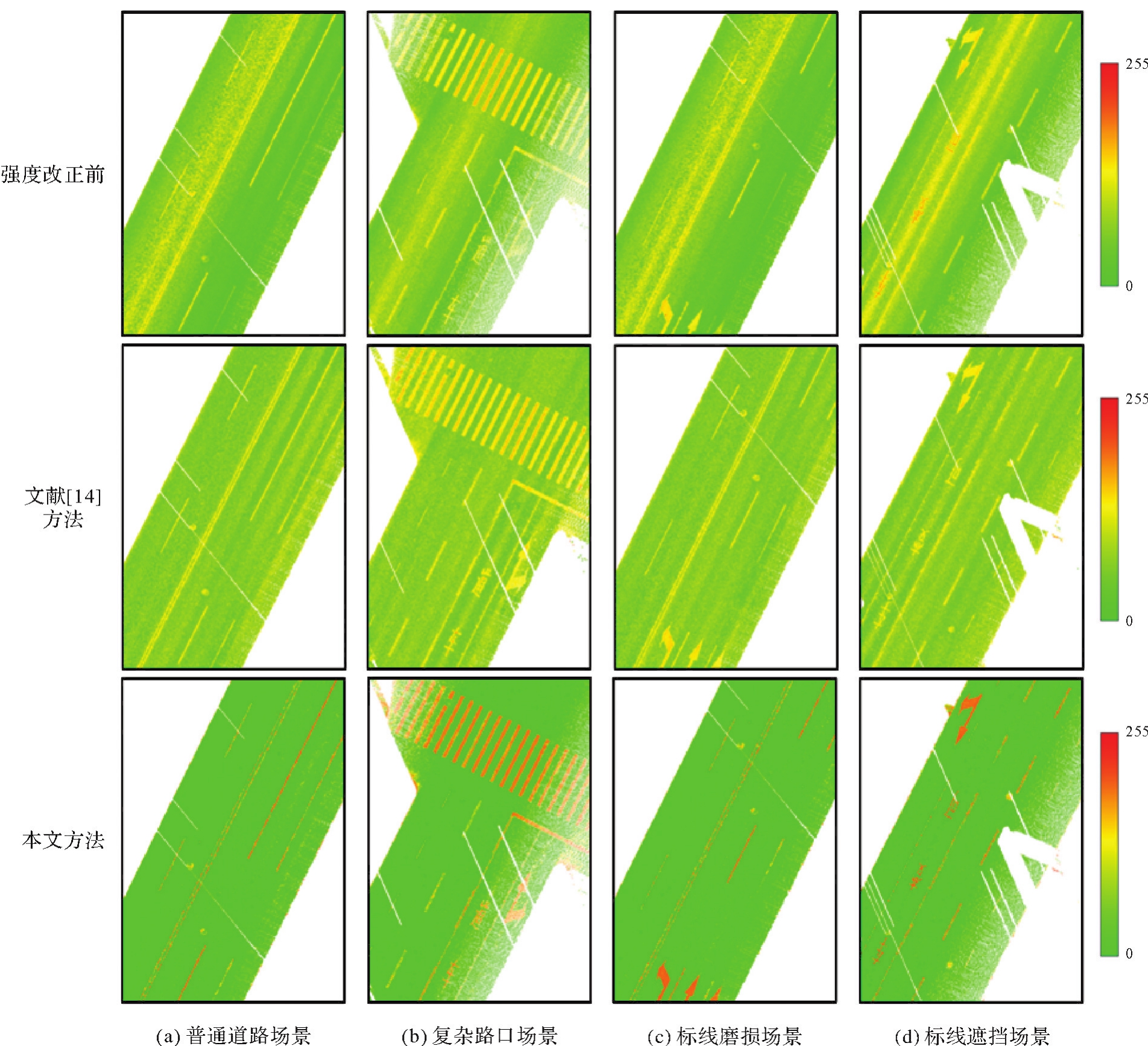

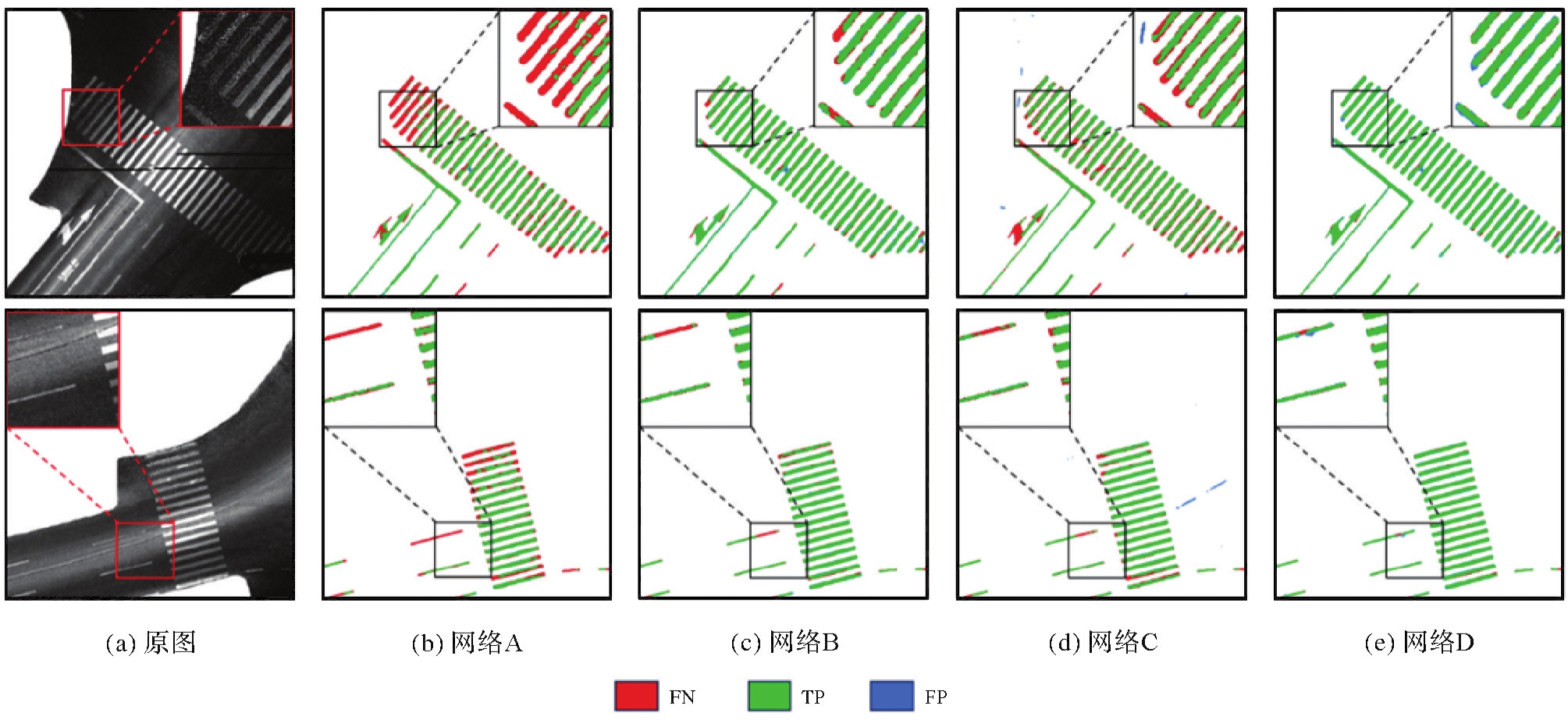
Fig.15
Segmentation results using different networks"

Tab.2
Evaluation and comparison of different network segmentation results"
| 试验数据 | 网络结构 | 精度 | 召回率 | F1值 | IOU |
|---|---|---|---|---|---|
| 路段1 | RESA[ | 0.883 1 | 0.925 2 | 0.90 36 | 0.824 7 |
| LST-Net | 0.938 9 | 0.967 9 | 0.953 2 | 0.910 5 | |
| 路段2 | RESA[ | 0.876 0 | 0.881 1 | 0.878 5 | 0.783 3 |
| LST-Net | 0.941 5 | 0.948 8 | 0.945 2 | 0.896 2 | |
| 路段3 | RESA[ | 0.885 6 | 0.899 6 | 0.892 6 | 0.806 4 |
| LST-Net | 0.942 7 | 0.953 3 | 0.947 9 | 0.901 1 |
Tab.3
Experiment setup for LST-Net structure ablation study"
| 网络结构名称 | 编解码部分 | 注意力模块 | 行列卷积模块 |
|---|---|---|---|
| A | √ | ||
| B | √ | √ | |
| C | √ | √ | |
| D(LST-Net) | √ | √ | √ |

Fig.16
Segmentation results using different network structures"
Tab.4
Evaluation comparison of segmentation results of different network structures"
| 网络结构名称 | 精度 | 召回率 | F1值 | IOU |
|---|---|---|---|---|
| A | 0.927 5 | 0.606 2 | 0.733 2 | 0.575 7 |
| B | 0.906 4 | 0.848 1 | 0.876 3 | 0.779 3 |
| C | 0.882 4 | 0.825 6 | 0.853 1 | 0.739 7 |
| D(LSA-Net) | 0.890 1 | 0.902 2 | 0.896 1 | 0.811 9 |

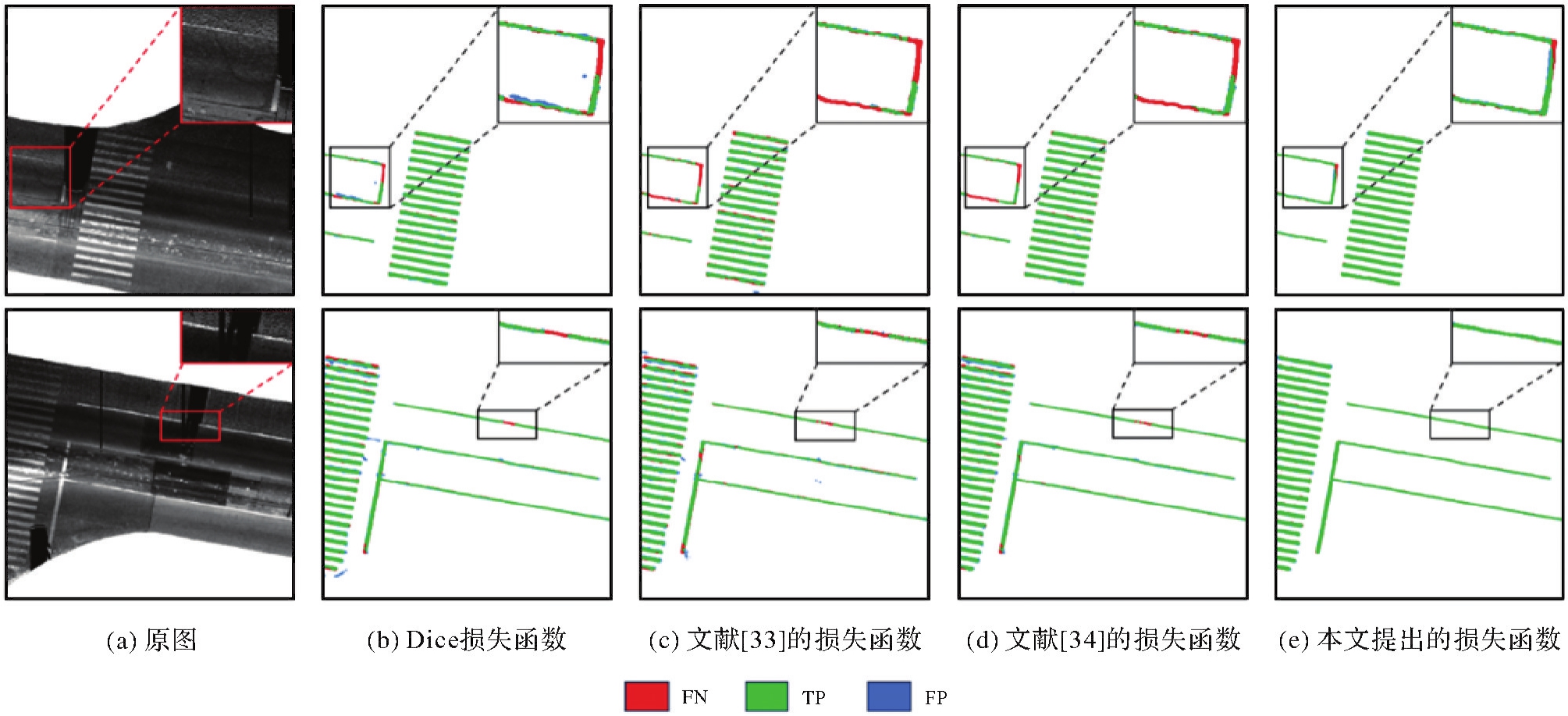
Fig.17
Segmentation results of LST-Net trained with different loss functions"
Tab.5
Comparison of segmentation results of models trained with different loss functions"
| 所用损失函数 | 精度 | 召回率 | F1值 | IOU |
|---|---|---|---|---|
| Dice损失 | 0.890 1 | 0.902 2 | 0.896 1 | 0.811 9 |
| 文献[ | 0.879 8 | 0.861 5 | 0.870 5 | 0.770 4 |
| 文献[ | 0.901 4 | 0.894 9 | 0.898 1 | 0.815 6 |
| 本文提出的损失函数 | 0.941 5 | 0.948 8 | 0.945 2 | 0.896 2 |

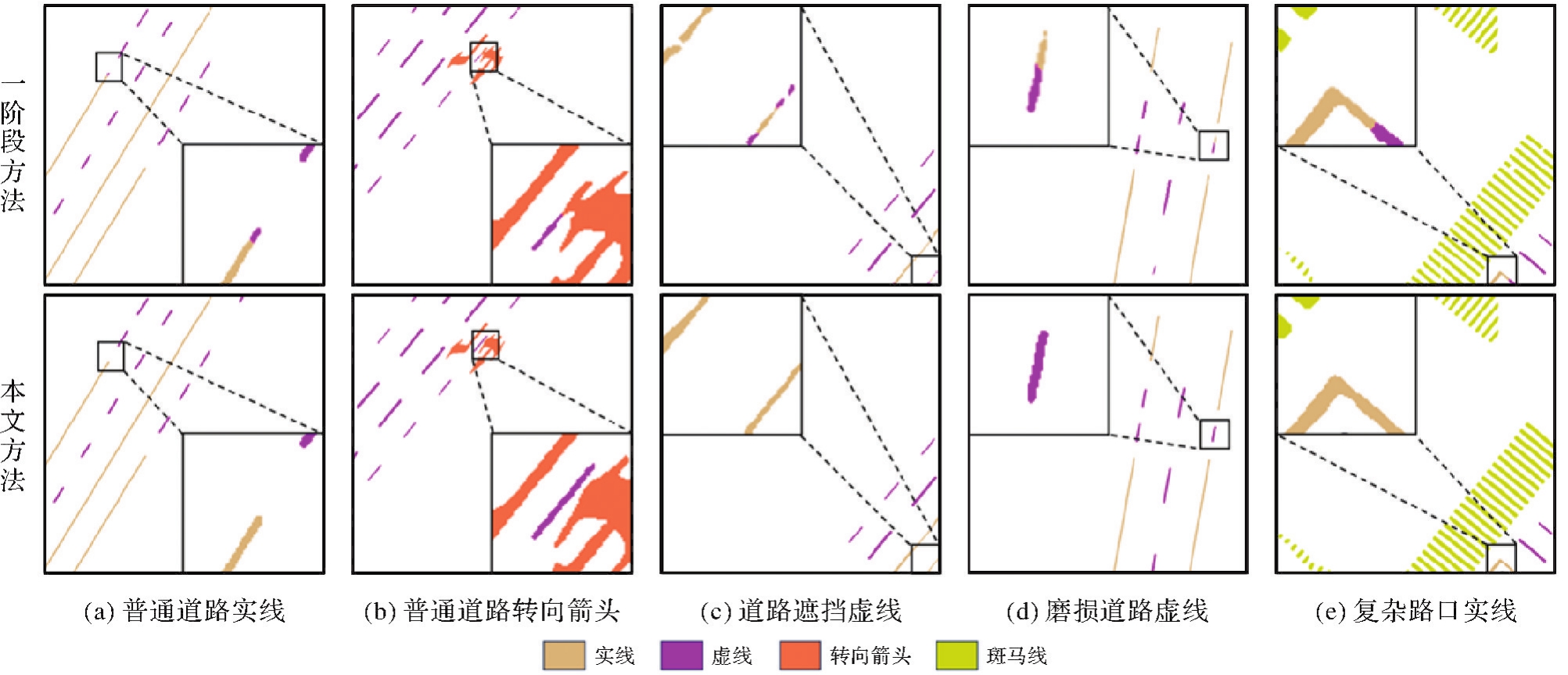
Fig.18
Example comparison of road markings extraction results using one-stage and our methods"
Tab.6
Quantitative evaluation of road markings classification"
| 道路标线类别 | 数量 | 精度 | 召回率 |
|---|---|---|---|
| 虚线 | 302 | 0.991 | 0.997 |
| 实线 | 669 | 0.996 | 0.975 |
| 转向箭头 | 27 | 0.971 | 0.963 |
| 斑马线 | 17 | 0.966 | 0.969 |
Tab.7
Quantitative evaluation of extraction results of different types of road markings"
| 评价指标 | 提取方法 | 虚线 | 实线 | 转向箭头 | 斑马线 |
|---|---|---|---|---|---|
| 精度 | 一阶段方法 | 0.908 5 | 0.905 6 | 0.926 1 | 0.935 0 |
| 本文方法 | 0.913 7 | 0.936 5 | 0.948 4 | 0.958 7 | |
| 召回率 | 一阶段方法 | 0.875 7 | 0.900 6 | 0.928 1 | 0.927 3 |
| 本文方法 | 0.935 4 | 0.934 5 | 0.930 3 | 0.967 3 |
| [1] | MATHIBELA B, NEWMAN P, POSNER I. Reading the road: road marking classification and interpretation[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2072-2081. |
| [2] |
李德仁, 洪勇, 王密, 等. 测绘遥感能为智能驾驶做什么?[J]. 测绘学报, 2021, 50(11): 1421-1431.DOI:.
doi: 10.11947/j.AGCS.2021.20210280 |
|
LI Deren, HONG Yong, WANG Mi, et al. What can surveying and remote sensing do for intelligent driving?[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1421-1431.DOI:.
doi: 10.11947/j.AGCS.2021.20210280 |
|
| [3] | WU Tao, RANGANATHAN A. A practical system for road marking detection and recognition[C]//Proceedings of 2012 IEEE Intelligent Vehicles Symposium. Madrid: IEEE, 2012: 25-30. |
| [4] | 刘经南, 吴杭彬, 郭迟, 等. 高精度道路导航地图的进展与思考[J]. 中国工程科学, 2018, 20(2): 99-105. |
| LIU Jingnan, WU Hangbin, GUO Chi, et al. Progress and consideration of high precision road navigation map[J]. Strategic Study of CAE, 2018, 20(2): 99-105. | |
| [5] | KIM J G, YOO J H, KOO J C. Road and lane detection using stereo camera[C]//Proceedings of 2018 IEEE International Conference on Big Data and Smart Computing. Shanghai: IEEE, 2018: 649-652. |
| [6] | AZIMI S M, FISCHER P, KORNER M, et al. Aerial LaneNet: lane-marking semantic segmentation in aerial imagery using wavelet-enhanced cost-sensitive symmetric fully convolutional neural networks[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(5): 2920-2938. |
| [7] | YIN Weiling, QIAN Mingyang, WANG Lijun, et al. Road extraction from satellite images with iterative cross-task feature enhancement[J]. Neurocomputing, 2022, 506: 300-310. |
| [8] | YANG Bisheng, WEI Zheng, LI Qingquan, et al. Automated extraction of street-scene objects from mobile LiDAR point clouds[J]. International Journal of Remote Sensing, 2012, 33(18): 5839-5861. |
| [9] | SMADJA L, NINOT J, GAVRILOVIC T. Road extraction and environment interpretation from LiDAR sensors[J]. IAPRS, 2010, 38: 281-286. |
| [10] | TOTH C, PASKAA E, BRZEZINSKA D. Using road pavement markings as ground control for LiDAR data[J]. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2008, 37(Part B1): 189-195. |
| [11] | HATA A, WOLF D. Road marking detection using LiDAR reflective intensity data and its application to vehicle localization[C]//Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems. Qingdao: IEEE, 2014: 584-589. |
| [12] | 谭凯, 程效军, 张吉星. TLS强度数据的入射角及距离效应改正方法[J]. 武汉大学学报(信息科学版), 2017, 42(2): 223-228. |
| TAN Kai, CHENG Xiaojun, ZHANG Jixing. Correction for incidence angle and distance effects on TLS intensity data[J]. Geomatics and Information Science of Wuhan University, 2017, 42(2): 223-228. | |
| [13] | CHEN Xin, KOHLMEYER B, STROILA M, et al. Next generation map making: geo-referenced ground-level LiDAR point clouds for automatic retro-reflective road feature extraction[C]//Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems. Seattle: ACM Press, 2009: 488-491. |
| [14] | WAN Rui, HUANG Yuchun, XIE Rongchang, et al. Combined lane mapping using a mobile mapping system[J]. Remote Sensing, 2019, 11(3): 305. |
| [15] | HUANG Pengdi, CHENG Ming, CHEN Yiping, et al. Traffic sign occlusion detection using mobile laser scanning point clouds[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(9): 2364-2376. |
| [16] | JUNG J, CHE Erzhuo, OLSEN M J, et al. Efficient and robust lane marking extraction from mobile LiDAR point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 147: 1-18. |
| [17] | PAN Yue, YANG Bisheng, LI Shengfu, et al. Automatic road markings extraction, classification and vectorization from mobile laser scanning data[EB/OL]. [2023-07-01].https://isprs-archives.copernicus.org/articles/XLII-2-W13/1089/2019/isprs-archives-XLII-2-W13-1089-2019.pdf. |
| [18] | YE Chengming, ZHAO He, MA Lingfei, et al. Robust lane extraction from MLS point clouds towards HD maps especially in curve road[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 1505-1518. |
| [19] | WEN Chenglu, SUN Xiaotian, LI J, et al. A deep learning framework for road marking extraction, classification and completion from mobile laser scanning point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 147: 178-192. |
| [20] | CHENG Yiting, PATEL A, WEN Chenglu, et al. Intensity thresholding and deep learning based lane marking extraction and lane width estimation from mobile light detection and ranging (LiDAR) point clouds[J]. Remote Sensing, 2020, 12(9): 1379. |
| [21] | MA Lingfei, LI Ying, LI J, et al. Capsule-based networks for road marking extraction and classification from mobile LiDAR point clouds[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(4): 1981-1995. |
| [22] | CHEN Siyun, ZHANG Zhenxin, ZHONG Ruofei, et al. A dense feature pyramid network-based deep learning model for road marking instance segmentation using MLS point clouds[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(1): 784-800. |
| [23] | CHAURASIA A, CULURCIELLO E. LinkNet: exploiting encoder representations for efficient semantic segmentation[C]//Proceedings of 2017 IEEE Visual Communications and Image Processing. St. Petersburg: IEEE, 2017: 1-4. |
| [24] | PAN Xingang, SHI Jianping, LUO Ping, et al. Spatial as deep: spatial CNN for traffic scene understanding[C]//Proceedings of the 32nd AAAI Conference on Artificial Intelligence. [S.l.]: AAAI, 2018. |
| [25] | ZHANG Han, GOODFELLOW I, METAXAS D, et al. Self-attention generative adversarial networks[C]//Proceedings of the 36th International Conference on Machine Learning. Long Beach: [s.n.], 2019: 7354-7363. |
| [26] | HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 770-778. |
| [27] | SASAKI K, IIZUKA S, SIMO-SERRA E, et al. Joint gap detection and inpainting of line drawings[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 5725-5733. |
| [28] | CHENG Yiting, LIN Yichun, HABIB A. Generalized LiDAR intensity normalization and its positive impact on geometric and learning-based lane marking detection[J]. Remote Sensing, 2022, 14(17): 4393. |
| [29] | BAI Jie, NIU Zheng, GAO Shuai, et al. An exploration, analysis, and correction of the distance effect on terrestrial hyperspectral LiDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2023, 198: 60-83. |
| [30] | ZHENG Tu, FANG Hao, ZHANG Yi, et al. RESA: recurrent feature-shift aggregator for lane detection[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(4): 3547-3554. |
| [31] | FENG Zhengyang, GUO Shaohua, TAN Xin, et al. Rethinking efficient lane detectionvia curve modeling[C]//Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans: IEEE, 2022: 17062-17070. |
| [32] | WANG Jinsheng, MA Yinchao, HUANG Shaofei, et al. A keypoint-based global association network for lane detection[C]//Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans: IEEE, 2022: 1392-1401. |
| [33] | MOSINSKA A, MARQUEZ-NEILA P, KOZINSKI M, et al. Beyond the pixel-wise loss for topology-aware delineation[C]//Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018. |
| [34] | SHIT S, PAETZOLD J C, SEKUBOYINA A, et al. clDice—a novel topology-preserving loss function for tubular structure segmentation[C]//Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville: IEEE, 2021. |
| [35] | RONNEBERGER O, FISCHER P, BROX T. U-Net: convolutional networks for biomedical image segmentation[C]//Proceedings of 2015 MICCAI. Cham: Springer International Publishing, 2015: 234-241. |
| [1] | Zejiao WANG, Longgang XIANG, Meng WANG, Xingjuan WANG, Qing LIU. Hierarchical feature and diversified attention fusion network for collaborative extraction of road surface and centerline [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 548-563. |
| [2] | Yakun XIE, Yaoji ZHAO, Jiaxing TU, Ruifeng XIA, Dejun FENG, Suning LIU, Hongyu CHEN, Jun ZHU. Edge and global features integrated network for salient object detection in optical remote sensing images [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1265-1279. |
| [3] | Jie WAN, Zhong XIE, Yongyang XU, Liufeng TAO. A U-shaped graph convolution network method for semantic segmentation of vehicle LiDAR point clouds towards urban road scenes [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1280-1293. |
| [4] | Bo HU, Hanxin CHEN, Song REN, Yinghao QU, Qingyi LIU, Xinyue TU, Datao WANG. A post-processing algorithm for automatic recognition of tunnel crack diseases based on segmentation masks [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(9): 1715-1724. |
| [5] | Tao XU, Yuanwei YANG, Xianjun GAO, Zhiwei WANG, Yue PAN, Shaohua LI, Lei XU, Yanjun WANG, Bo LIU, Jing YU, Fengmin WU, Haoyu SUN. Integrated graph convolution and multi-scale features for the overhead catenary system point cloud semantic segmentation [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(8): 1624-1633. |
| [6] | Jun YANG, Hengjing XIE, Hongchao FAN, Haowen YAN. Multi-scale entropy neural architecture search for object detection in remote sensing images [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(7): 1384-1400. |
| [7] | LIN Yunhao, WANG Yanjun, LI Shaochun, CAI Hengfan. A coupled DeepLab and Transformer approach for fine classification of crop cultivation types in remote sensing [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(2): 353-366. |
| [8] | Genyun SUN, Chao SUN, Aizhu ZHANG. Road extraction networks fusing multiscale and edge features [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(12): 2233-2243. |
| [9] | Weitong CHEN, Xin XU, Changqing ZHU, Na REN. Protection for remote sensing object detection datasets based on backdoor watermarking and region of interest encryption [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(11): 2086-2098. |
| [10] | Yinsheng ZHANG, Ge CHEN, Xiuxian DUAN, Junyi TONG, Mengjiao SHAN, Huilin SHAN. Landslide image segmentation model based on multi-layer feature information fusion [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(11): 2201-2212. |
| [11] | HU Gongming, YANG Chuncheng, XU Li, SHANG Haibin, WANG Zefan, QIN Zhilong. Improved U-Net remote sensing image semantic segmentation method [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(6): 980-989. |
| [12] | LIU Shuai, LI Xiaoying, YU Meng, XING Guanglong. Dual decoupling semantic segmentation model for high-resolution remote sensing images [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(4): 638-647. |
| [13] | SHEN Ziyang, NI Huan, GUAN Haiyan. Unsupervised domain adaptation alignment method for cross-domain semantic segmentation of remote sensing images [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(12): 2115-2126. |
| [14] | ZHANG Rongting, ZHANG Guangyun, YIN Jihao. Semantic segmentation method of 3D scenes using dynamic graph CNN for complex city [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(10): 1703-1713. |
| [15] | CHEN Zhanlong, LI Shuangjiang, XU Yongyang, XU Daozhu, MA Chao, ZHAO Junli. Correg-YOLOv3: a method for dense buildings detection in high-resolution remote sensing images [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(12): 2531-2540. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||