


测绘学报 ›› 2024, Vol. 53 ›› Issue (9): 1761-1776.doi: 10.11947/j.AGCS.2024.20230371
程建华( ), 陈思成, 臧楠(), 程思翔, 赵国晶, 马子凡
), 陈思成, 臧楠(), 程思翔, 赵国晶, 马子凡
收稿日期:2023-09-07
出版日期:2024-10-16
发布日期:2024-10-16
通讯作者:
臧楠
E-mail:ins_cheng@163.com;zang6050@163.com
作者简介:程建华(1977—),男,博士,教授,研究方向为惯性及组合导航技术。E-mail:ins_cheng@163.com
基金资助:
Jianhua CHENG(), Sicheng CHEN, Nan ZANG(), Sixiang CHENG, Guojing ZHAO, Zifan MA
Received:2023-09-07
Online:2024-10-16
Published:2024-10-16
Contact:
Nan ZANG
E-mail:ins_cheng@163.com;zang6050@163.com
About author:CHENG Jianhua (1977—), male, PhD, professor, majors in SINS and integration technology. E-mail: ins_cheng@163.com
Supported by:摘要:
卫星信号在城市高遮挡环境下受复杂干扰引起的质量下降甚至中断问题,常引发精密单点定位/惯性导航系统(PPP/INS)紧组合导航误差发散。基于常值高程假设提出的传统高程约束模型虽可有效抑制平缓路面下惯性导航系统的误差累积,但因其无法合理地适应路面高程变化而难以增强高遮挡环境下的PPP/INS紧组合模型。本文顾及载体运动中短时高程变化率相近的特性,提出一种自适应短时高程变化率的高程约束PPP/INS紧组合模型。采用模拟的遮挡环境和真实的城市环境下的车载试验验证本文模型有效性。在真实城市环境试验中,相比于无约束、顾及高程变化定权的高程常值约束、历元间高程常值约束3种PPP/INS紧组合模型,本文模型在高程方向上定位精度分别提升52.2%、49.2%、70.9%。
中图分类号:
程建华, 陈思成, 臧楠, 程思翔, 赵国晶, 马子凡. 附加自适应短时高程变化率约束的PPP/INS紧组合增强模型[J]. 测绘学报, 2024, 53(9): 1761-1776.
Jianhua CHENG, Sicheng CHEN, Nan ZANG, Sixiang CHENG, Guojing ZHAO, Zifan MA. PPP/INS tightly integrated enhancement model considering adaptive short-term height variation rate constraint[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(9): 1761-1776.
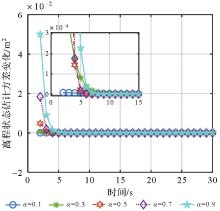
图1
高程状态估计误差方差影响变化"
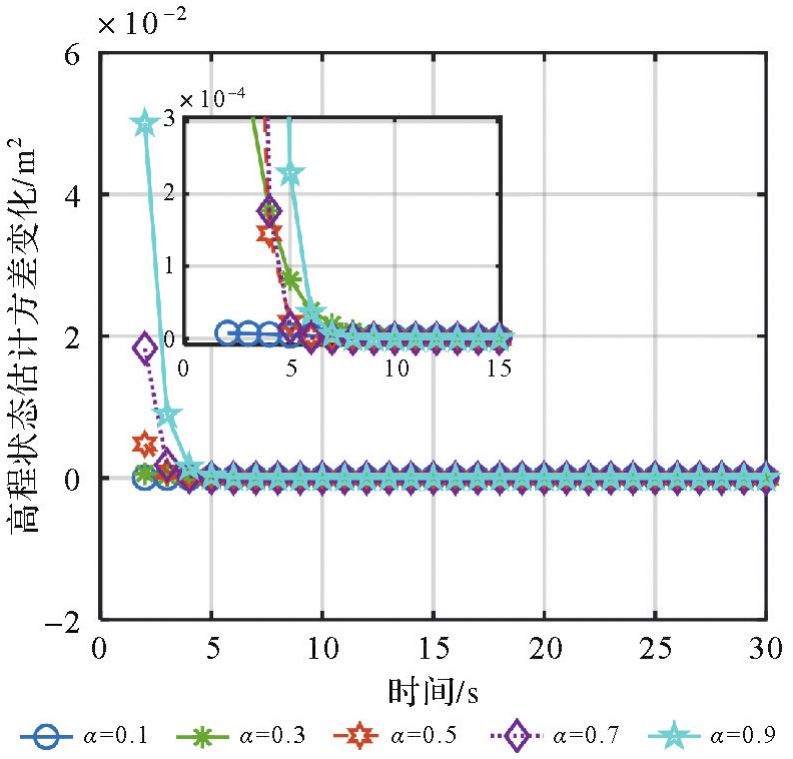
表1
IMU主要性能参数"
| 参数 | 陀螺仪 | 加速度计 | ||||
|---|---|---|---|---|---|---|
| SPAN CPT | KVH1750 | μIMU | SPAN CPT | KVH1750 | μIMU | |
| 初始零偏 | 20°/h | 2°/h | — | 0.5 m/s2 | 2×10-2 m/s2 | — |
| 零偏不稳定性 | 1°/h | 0.07°/h | — | 7.5×10-2 m/s2 | 7.5×10-2 m/s2 | 7.5×10-2 m/s2 |
| 零偏稳定性 | — | — | 6°/h | — | — | — |
| 比例因子 | 1500×10-6 | ≤50×10-6 | ≤1400×10-6 | 4000×10-6 | ≤100×10-6 | ≤1500×10-6 |
| 随机游走 | 0.067°/sqrt(h) | 0.012°/sqrt(h) | 0.3°/sqrt(h) | 5.5×10-4/sqrt(Hz) | 1.17×10-3/sqrt(Hz) | 2.5×10-4/sqrt(Hz) |
表2
无电离层PPP/INS紧组合参数估计策略"
| 待估参数 | 估计策略 |
|---|---|
| 对流层延迟τ | 天顶干延迟(Saastamoinen模型改正) 天顶湿延迟(估计为随机游走) |
| GPS接收机钟差dtr,IF,k | 估计为白噪声 |
| 系统间偏差ISBk | 估计为随机游走 |
无电离层组合浮点模糊度 | 估计为常值浮点解 |
加速度计偏差 | 估计为随机游走 |
| 陀螺仪偏差(με) | 估计为随机游走 |
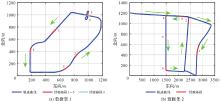
图2
车载试验轨迹"
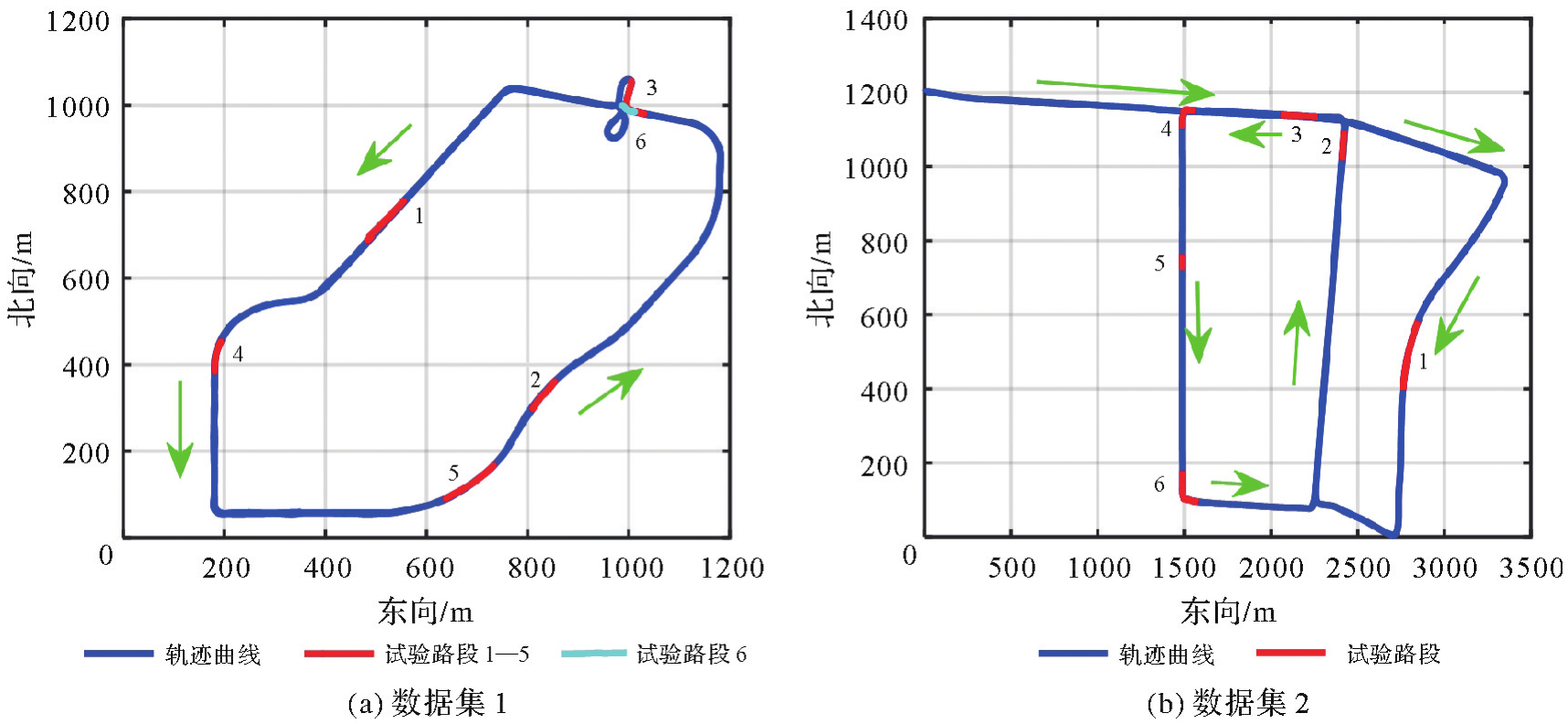
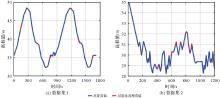
图3
车载试验高程变化"
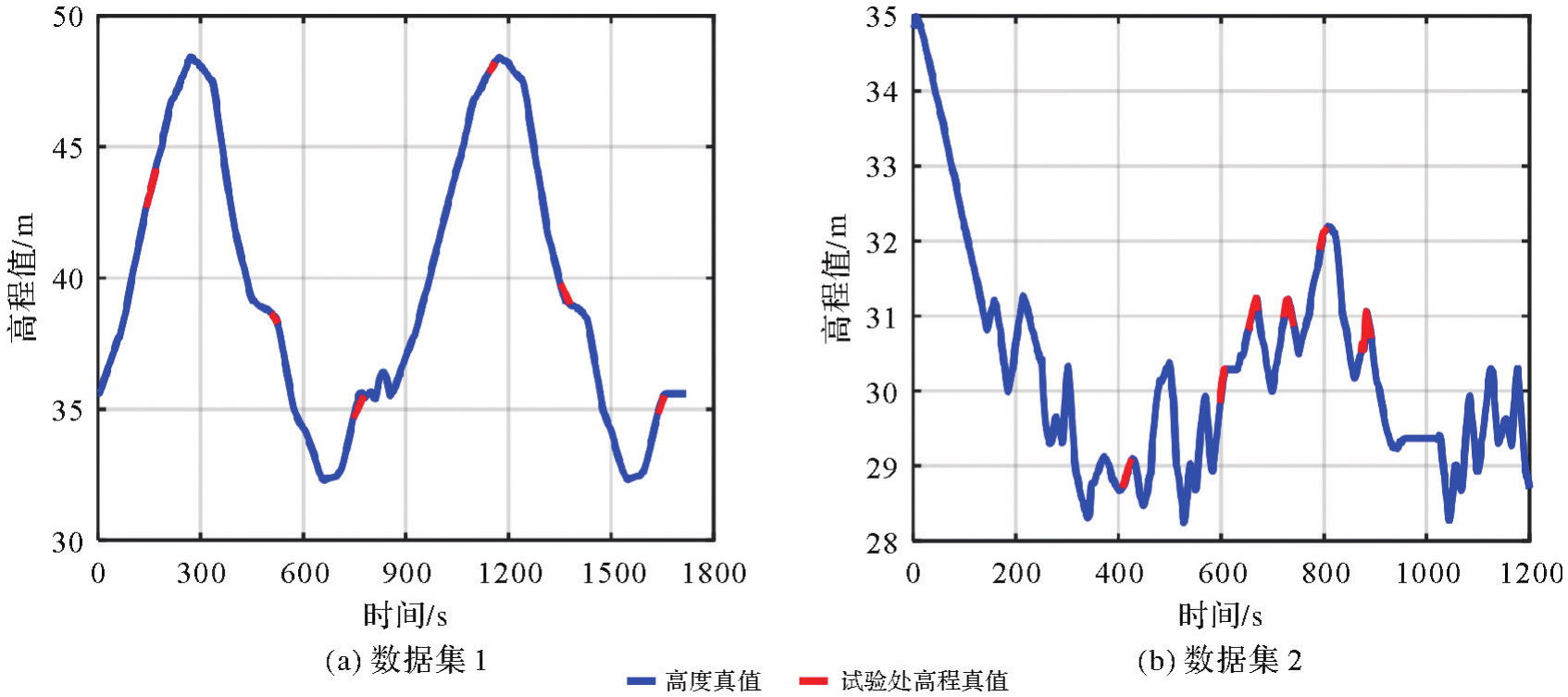
表3
试验轨迹卫星情况设置情况"
| 路段 | 数据集1 | 数据集2 | ||||
|---|---|---|---|---|---|---|
| 遮挡路段时间/s | 坡度/(%) | 高度截止角/(°) | 遮挡路段时间/s | 坡度/(%) | 高度截止角/(°) | |
| 路段1 | 139~168 | 1.44 | 90 | 408~427 | 0.16 | 78,70 |
| 路段2 | 507~526 | -0.80 | 78 | 498~612 | 0.45 | 78 |
| 路段3 | 747~776 | 1.14 | 78 | 653~672 | 7.69~-4.09 | 70 |
| 路段4 | 1142~1161 | 0.57 | 70 | 723~742 | 9.52~-0.53 | 80 |
| 路段5 | 1352~1381 | -0.64 | 70,90 | 793~807 | 0.55 | 70 |
| 路段6 | 1637~1656 | 1.74 | 70 | 873~892 | 0.53~-2.24 | 78 |
图4
可视卫星数及相应的三维位置精度"
表4
约束模型描述"
| 模型 | 约束 | 函数模型 | 随机模型 |
|---|---|---|---|
| 1 | 无约束(HCF) | 无 | 无 |
| 2 | 顾及高程变化定权的高程常值约束模型(HRWHC) |  | Rhc,k=(dh)2 |
| 3 | 历元间高程常值约束模型(ICHC) |  | Rhc,k=Pk-1 |
| 4 | 自适应短时高程变化率的高程约束模型(ASTHVRC) |  |  |

图5
约束模型误差对比曲线"
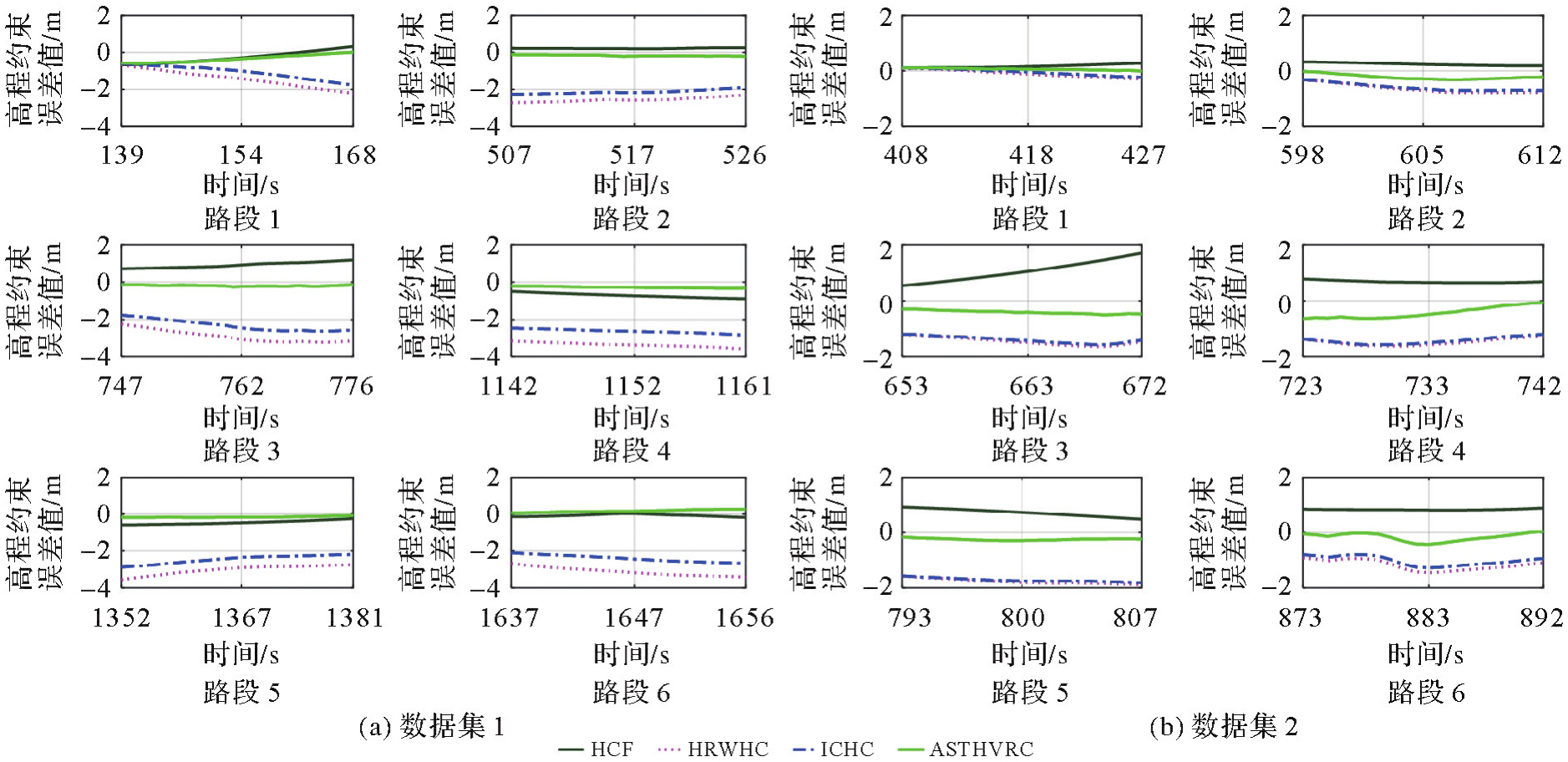
图6
数据集1高程约束方差和高程约束值误差平方对比"


图7
数据集2高程约束方差和高程约束值误差平方对比"
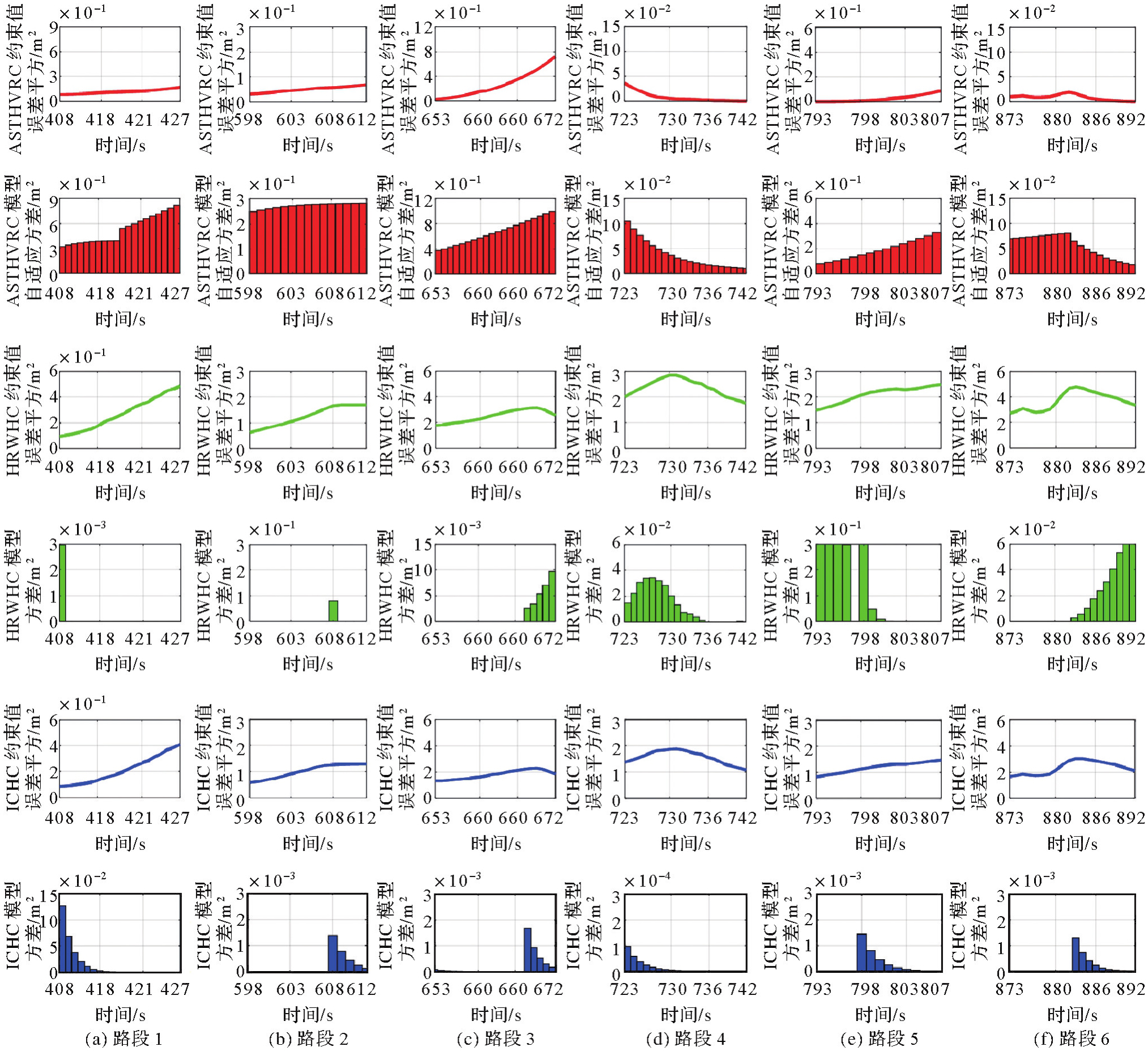

图8
三维位置误差对比曲线"
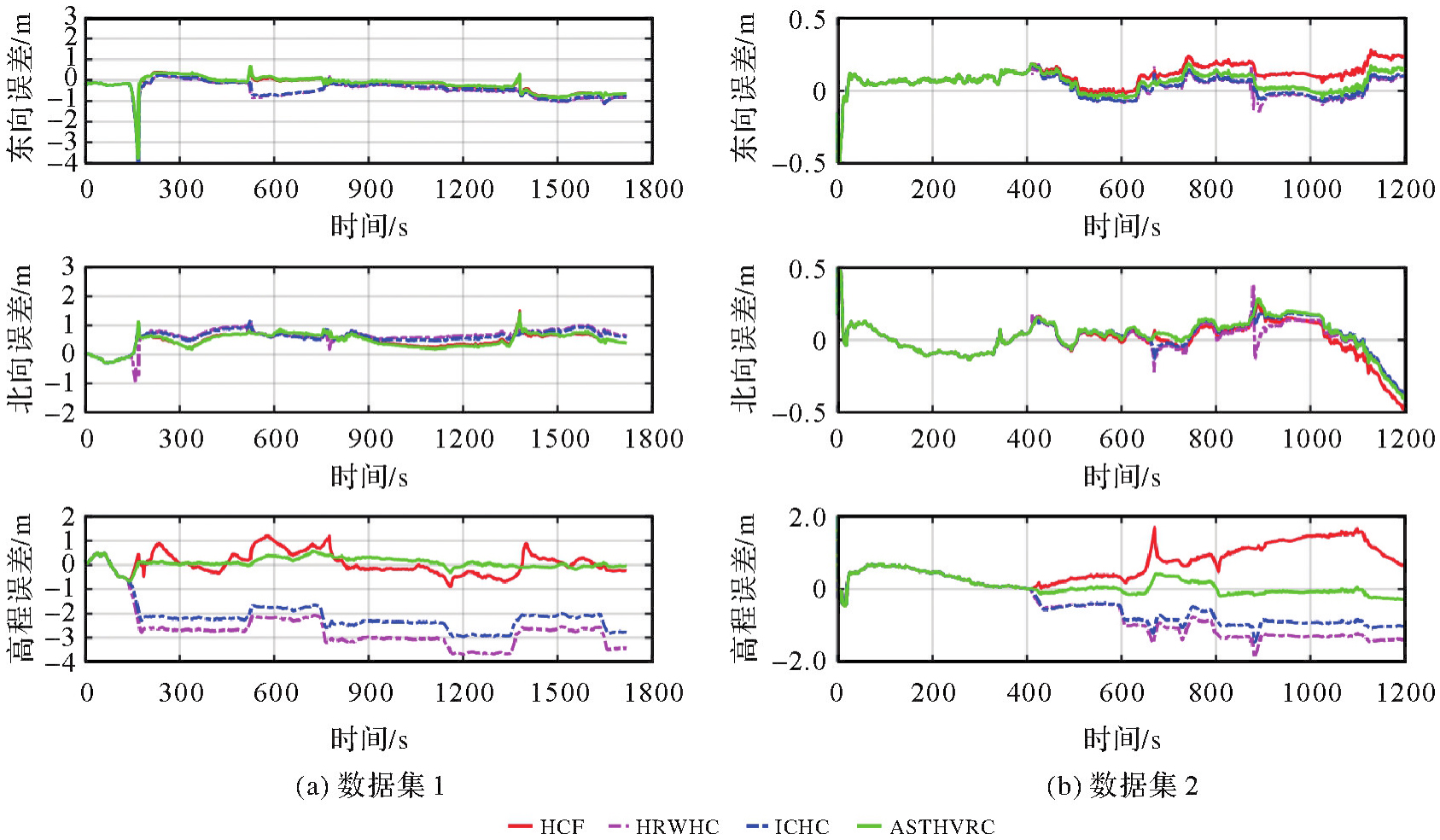
表5
4种模型三维定位均方根误差"
| 模型 | 东方向 | 北方向 | 高程 | |||
|---|---|---|---|---|---|---|
| 数据集1 | 数据集2 | 数据集1 | 数据集2 | 数据集1 | 数据集2 | |
| 1 | 0.45 | 0.13 | 0.56 | 0.14 | 0.46 | 0.84 |
| 2 | 0.62 | 0.09 | 0.71 | 0.12 | 2.87 | 0.94 |
| 3 | 0.59 | 0.09 | 0.67 | 0.12 | 2.29 | 0.73 |
| 4 | 0.45 | 0.09 | 0.55 | 0.13 | 0.21 | 0.30 |

图9
数据集1、数据集2分路段高程误差统计"
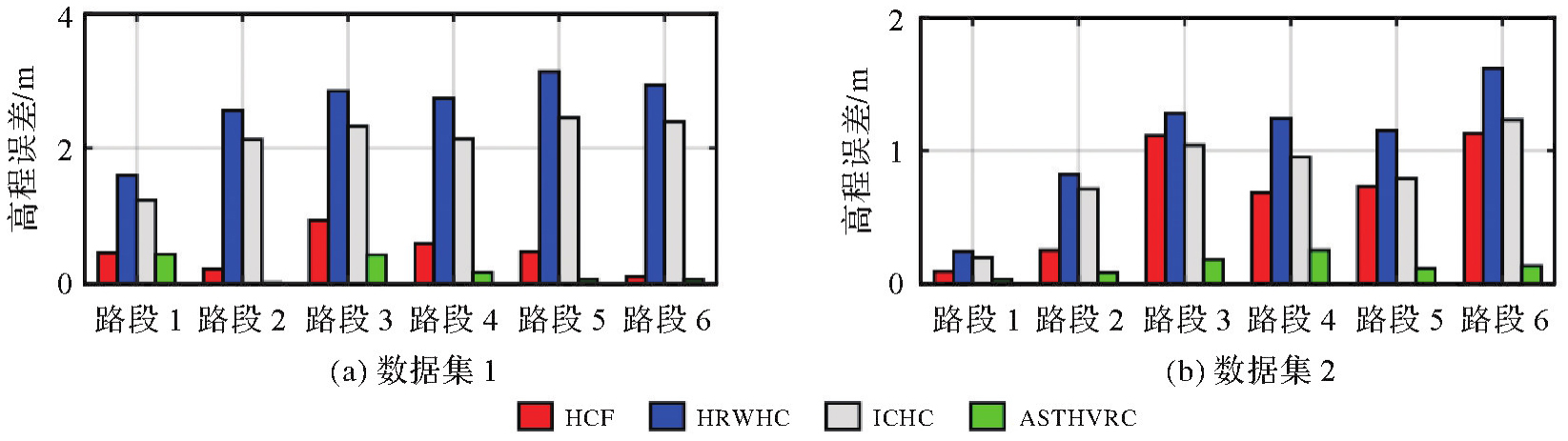
表6
数据集1分路段高程均方根误差及其最大误差绝对值"
| 模型 | 路段1 | 路段2 | 路段3 | 路段4 | 路段5 | 路段6 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | |
| 1 | 0.45 | 0.66 | 0.21 | 0.24 | 0.93 | 1.18 | 0.72 | 0.89 | 0.47 | 0.59 | 0.10 | 0.18 |
| 2 | 1.60 | 2.33 | 2.56 | 2.73 | 2.85 | 3.20 | 3.35 | 3.56 | 3.14 | 3.62 | 2.94 | 3.38 |
| 3 | 1.23 | 1.88 | 2.13 | 2.26 | 2.33 | 2.62 | 2.62 | 2.82 | 2.46 | 2.90 | 2.40 | 2.67 |
| 4 | 0.44 | 0.64 | 0.01 | 0.02 | 0.42 | 0.48 | 0.20 | 0.29 | 0.06 | 0.10 | 0.06 | 0.09 |
表7
数据集2分路段高程均方根误差及其最大误差绝对值"
| 模型 | 路段1 | 路段2 | 路段3 | 路段4 | 路段5 | 路段6 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | |
| 1 | 0.09 | 0.18 | 0.25 | 0.33 | 1.11 | 1.69 | 0.68 | 0.78 | 0.73 | 0.93 | 1.13 | 1.19 |
| 2 | 0.24 | 0.40 | 0.82 | 1.00 | 1.28 | 1.47 | 1.24 | 1.38 | 1.15 | 1.27 | 1.62 | 1.88 |
| 3 | 0.19 | 0.34 | 0.71 | 0.84 | 1.04 | 1.21 | 0.95 | 1.07 | 0.79 | 0.91 | 1.23 | 1.45 |
| 4 | 0.03 | 0.09 | 0.08 | 0.12 | 0.18 | 0.38 | 0.25 | 0.34 | 0.11 | 0.19 | 0.13 | 0.16 |
表8
数据集1和数据集2不同中断时间下4种模型定位误差"
| 数据集 | 模型 | 30 s | 60 s | 90 s | 120 s | 150 s | 180 s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 高程 | 三维 | 高程 | 三维 | 高程 | 三维 | 高程 | 三维 | 高程 | 三维 | 高程 | 三维 | ||
| 数据集1 | 1 | 0.90 | 4.92 | 0.73 | 18.67 | 1.19 | 43.26 | 2.35 | 90.55 | 3.64 | 164.73 | 5.43 | 269.83 |
| 2 | 1.60 | 5.93 | 2.56 | 71.93 | 3.34 | 169.15 | 4.28 | 314.10 | 5.01 | 468.13 | 5.59 | 660.06 | |
| 3 | 1.87 | 5.13 | 2.85 | 17.19 | 3.62 | 45.31 | 4.56 | 119.43 | 5.30 | 206.17 | 5.91 | 337.80 | |
| 4 | 0.82 | 4.88 | 0.71 | 18.06 | 0.59 | 41.84 | 0.53 | 71.47 | 0.63 | 105.24 | 0.95 | 163.40 | |
| 数据集2 | 1 | 0.16 | 0.91 | 0.20 | 3.22 | 1.28 | 7.78 | 3.77 | 15.15 | 7.71 | 25.51 | 13.02 | 38.01 |
| 2 | 0.20 | 0.91 | 0.27 | 3.11 | 0.57 | 11.71 | 0.91 | 31.19 | 0.82 | 68.10 | 0.81 | 104.98 | |
| 3 | 0.23 | 0.96 | 0.30 | 3.67 | 0.59 | 13.66 | 0.94 | 40.35 | 0.85 | 61.93 | 0.84 | 113.56 | |
| 4 | 0.10 | 0.32 | 0.12 | 1.60 | 0.57 | 6.77 | 1.07 | 17.19 | 1.44 | 36.39 | 1.88 | 60.42 | |
图10
数据集3车载试验轨迹图和车载试验高程变化"
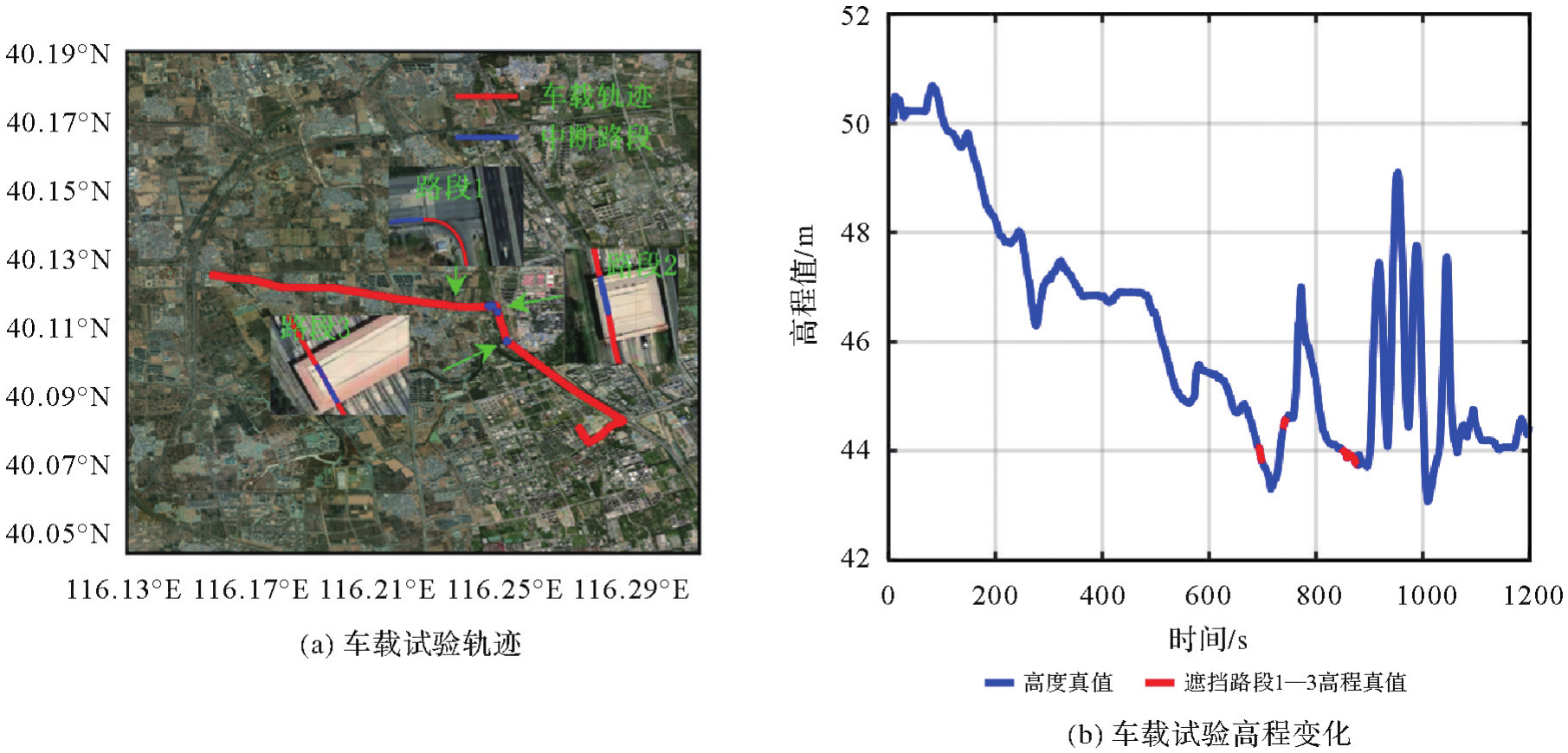
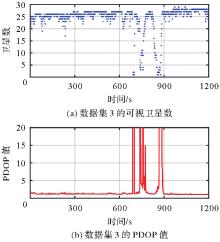
图11
可视卫星数及相应的三维位置精度"
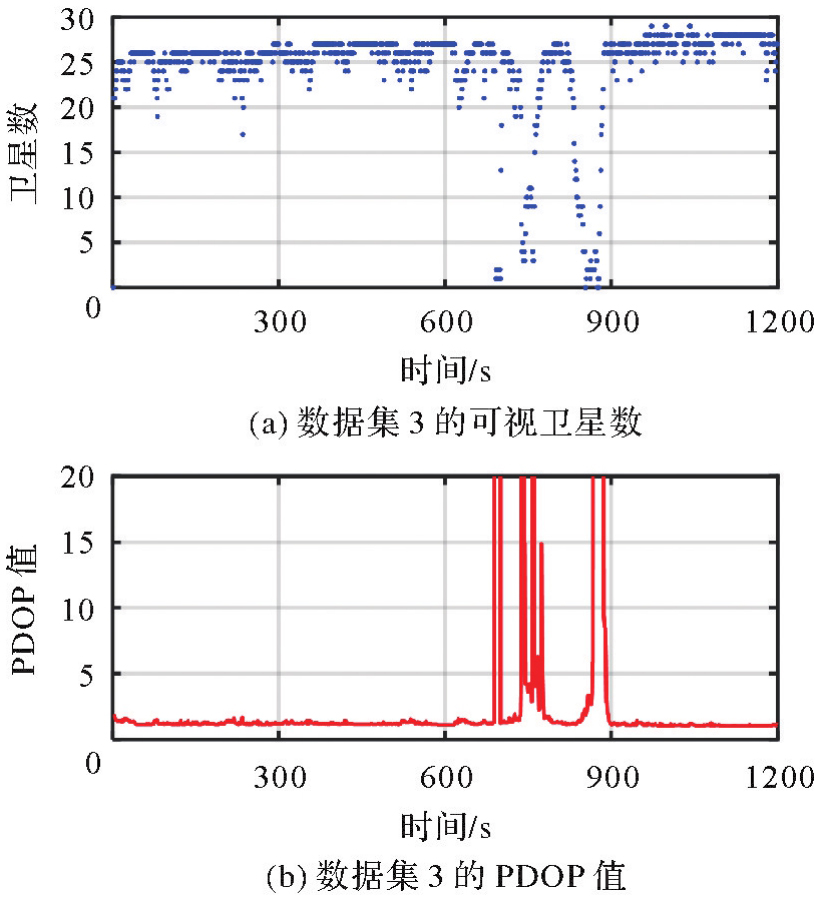
表9
遮挡路段发生时段及路面坡度"
| 设置 | 路段1 | 路段2 | 路段3 |
|---|---|---|---|
| 遮挡路段时间/s | 691~699 | 739~741,744,758 | 848~876 |
| 坡度/(%) | -0.27 | 1.86 | -1.85 |
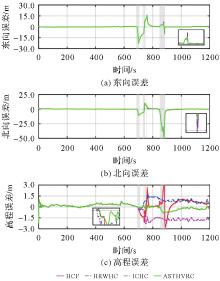
图12
三维位置误差对比曲线"
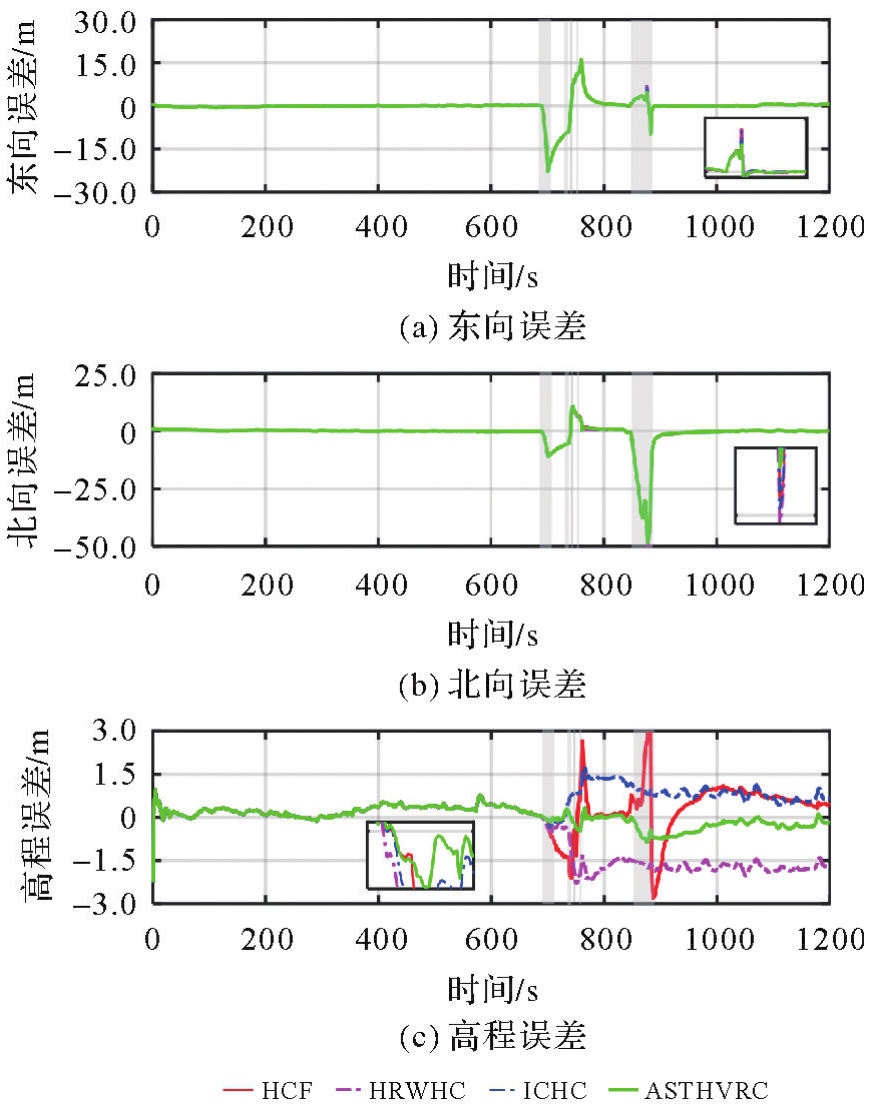
表10
4种模型三维定位均方根误差"
| 模型 | 东方向 | 北方向 | 高程 |
|---|---|---|---|
| 1 | 3.20 | 5.72 | 0.67 |
| 2 | 3.19 | 5.71 | 0.63 |
| 3 | 3.20 | 5.75 | 1.10 |
| 4 | 3.18 | 5.64 | 0.32 |
表11
数据集3分路段高程均方根误差及其最大误差绝对值"
| 模型 | 路段1 | 路段2 | 路段3 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 691~699 s | 739~741 s | 744 s | 758 s | 848~876 s | ||||||
| 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | |
| 1 | 0.05 | 0.08 | 2.03 | 2.08 | 1.54 | 1.54 | 0.99 | 0.99 | 1.27 | 2.68 |
| 2 | 0.20 | 0.34 | 0.91 | 1.04 | 1.48 | 1.48 | 1.95 | 1.95 | 1.58 | 1.73 |
| 3 | 0.12 | 0.23 | 0.72 | 0.77 | 0.80 | 0.80 | 0.90 | 0.90 | 0.98 | 1.18 |
| 4 | 0.05 | 0.07 | 0.07 | 0.11 | 0.14 | 0.14 | 0.44 | 0.44 | 0.54 | 0.86 |
| [1] | WANG Minghua, WANG Jiexian, DONG Danan, et al. Performance of BDS-3: satellite visibility and dilution of precision[J]. GPS Solutions, 2019, 23(2):56. |
| [2] | SHI Junbo, OUYANG Chenhao, HUANG Yongshuai, et al. Assessment of BDS-3 global positioning service: ephemeris, SPP, PPP, RTK, and new signal[J]. GPS Solutions, 2020, 24(3):81. |
| [3] | 杨元喜. 弹性PNT基本框架[J]. 测绘学报, 2018, 47(7):893-898. DOI: 10.11947/j.AGCS.2018.20180149. |
| YANG Yuanxi. Resilient PNT concept frame[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(7):893-898. DOI: 10.11947/j.AGCS.2018.20180149. | |
| [4] | 张小红, 李星星, 李盼. GNSS精密单点定位技术及应用进展[J]. 测绘学报, 2017, 46(10):1399-1407. DOI: 10.11947/j.AGCS.2017.20170327. |
| ZHANG Xiaohong, LI Xingxing, LI Pan. Review of GNSS PPP and its application[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10):1399-1407. DOI: 10.11947/j.AGCS.2017.20170327. | |
| [5] | HEGARTY C J, CHATRE E. Evolution of the global navigation satellite system (GNSS)[J]. Proceedings of the IEEE, 2008, 96(12):1902-1917. |
| [6] | KING A D. Inertial navigation-forty years of evolution[J]. GEC review, 1998, 13(3):140-149. |
| [7] | LI Bofeng, ZANG Nan, GE Haibo, et al. Single-frequency PPP models: analytical and numerical comparison[J]. Journal of Geodesy, 2019, 93(12):2499-2514. |
| [8] | LI Xingxing, WANG Huidan, LI Shengyu, et al. GIL: a tightly coupled GNSS PPP/INS/LiDAR method for precise vehicle navigation[J]. Satellite Navigation, 2021, 2(1):26. |
| [9] | CHANG Le, NIU Xiaoji, LIU Tianyi, et al. GNSS/INS/LiDAR-SLAM integrated navigation system based on graph optimization[J]. Remote Sensing, 2019, 11(9):1009. |
| [10] | LIU Fei, HAN Houzeng, CHENG Xin, et al. Performance of tightly coupled integration of GPS/BDS/MEMS-INS/odometer for real-time high-precision vehicle positioning in urban degraded and denied environment[J]. Journal of Sensors, 2020:8670262. |
| [11] | CHIANG Kaiwei, CHANG H W, LI Yuhua, et al. Assessment for INS/GNSS/odometer/barometer integration in loosely-coupled and tightly-coupled scheme in a GNSS-degraded environment[J]. IEEE Sensors Journal, 2020, 20(6):3057-3069. |
| [12] | VANA S, NACIRI N, BISNATH S. Benefits of motion constraining for robust, low-cost, dual-frequency gnss ppp+mems imu navigation[C]//Proceedings of 2020 IEEE/ION Position, Location and Navigation Symposium. Portland: IEEE, 2020: 1093-1103. |
| [13] | SUN Rui, YANG Yuanxi, CHIANG Kaiwei, et al. Robust IMU/GPS/VO integration for vehicle navigation in GNSS degraded urban areas[J]. IEEE Sensors Journal, 2020, 20(17):10110-10122. |
| [14] | 柴艳菊, 欧吉坤, 袁运斌, 等. 附加方位约束的GPS/INS组合系统选权自适应卡尔曼滤波[J]. 测绘学报, 2011, 40(4):421-428. |
| CHAI Yanju, OU Jikun, YUAN Yunbin, et al. The adaptive Kalman filtering for single antenna GPS/INS integrated system with heading angle constraint by selecting the parameter weights[J]. Acta Geodaetica et Cartographica Sinica, 2011, 40(4):421-428. | |
| [15] | DISSANAYAKE G, SUKKARIEH S, NEBOT E, et al. The aiding of a low-cost strapdown inertial measurement unit using vehicle model constraints for land vehicle applications[J]. IEEE Transactions on Robotics and Automation, 2001, 17(5):731-747. |
| [16] | CHENG Sixiang, CHENG Jianhua, ZANG Nan, et al. Adaptive non-holonomic constraint aiding multi-GNSS PPP/INS tightly coupled navigation in the urban environment[J]. GPS Solutions, 2023, 27(3):152. |
| [17] | KLEIN I, FILIN S, TOLEDO T. Vehicle constraints enhancement for supporting INS navigation in urban environments[J]. Navigation, 2011, 58(1):7-15. |
| [18] | NIU Xiaoji, ZHANG Hongping, CHIANG K W, et al. Using land-vehicle steering constraint to improve the heading estimation of MEMS GPS/INS georeferencing systems[C]//Proceedings of 2010 ISPRS-International Archives of the Photogrammetry. Kyoto: Remote Sensing Spatial Information Sciences, 2010: 1-5. |
| [19] | GODHA S, CANNON M E. GPS/MEMS INS integrated system for navigation in urban areas[J]. GPS Solutions, 2007, 11(3):193-203. |
| [20] | 柴艳菊, 阳仁贵, 王海涛, 等. 附加运动约束提高GPS/INS导航参数估计精度[J]. 中国惯性技术学报, 2011, 19(1):28-32. |
| CHAI Yanju, YANG Rengui, WANG Haitao, et al. Improving the navigation accuracy of GPS/INS by adding motion information constraints[J]. Journal of Chinese Inertial Technology, 2011, 19(1):28-32. | |
| [21] | 李彦杰, 杨元喜, 何海波. 附加约束条件对GNSS/INS组合导航结果的影响分析[J]. 武汉大学学报(信息科学版), 2017, 42(9):1249-1255. |
| LI Yanjie, YANG Yuanxi, HE Haibo. Effects analysis of constraints on GNSS/INS integrated navigation[J]. Geomatics and Information Science of Wuhan University, 2017, 42(9):1249-1255. | |
| [22] | 尹潇, 柴洪洲, 向民志, 等. 附加运动学约束的BDS抗差UKF导航算法[J]. 测绘学报, 2020, 49(11):1399-1406. DOI: 10.11947/j.AGCS.2020.20200149 |
| YIN Xiao, CHAI Hongzhou, XIANG Minzhi, et al. Robust UKF algorithm with motion constraint in BDS navigation[J]. Acta Geodaetica et Cartographica Sinica 2020, 49(11):1399-1406. DOI: 10.11947/j.AGCS.2020.2020149 | |
| [23] | YANG Jun, MA Jinfeng, LIU Xinning, et al. A height constrained adaptive Kalman filtering based on climbing motion model for GNSS positioning[J]. IEEE Sensors Journal, 2017, 17(21):7105-7113. |
| [24] | ZHANG Zhetao, LI Yuan, HE Xiufeng, et al. Resilient GNSS real-time kinematic precise positioning with inequality and equality constraints[J]. GPS Solutions, 2023, 27(3):116. |
| [25] | CHENG Sixiang, CHENG Jianhua, ZANG Nan, et al. A sequential student's t-based robust Kalman filter for multi-GNSS PPP/INS tightly coupled model in the urban environment[J]. Remote Sensing, 2022, 14(22):5878. |
| [26] | 王利, 张勤, 黄观文, 等. 基于指数平滑法的GPS卫星钟差预报[J]. 武汉大学学报(信息科学版), 2017, 42(7):995-1001. |
| WANG Li, ZHANG Qin, HUANG Guanwen, et al. GPS satellite clock bias prediction based on exponential smoothing method[J]. Geomatics and Information Science of Wuhan University, 2017, 42(7):995-1001. | |
| [27] | MONTGOMERY D C, PECK E A, VINING G G. Introduction to linear regression analysis[M].[S.l.]: John Wiley & Sons, 2021. |
| [28] | PAN Cheng, QIAN Nijia, LI Zengke, et al. A robust adaptive cubature Kalman filter based on SVD for dual-antenna GNSS/MIMU tightly coupled integration[J]. Remote Sensing, 2021, 13(10):1943. |
| [29] | CHEN Kai, CHANG Guobin, CHEN Chao. GINav: a Matlab-based software for the data processing and analysis of a GNSS/INS integrated navigation system[J]. GPS Solutions, 2021, 25(3):108. |
| [30] | 王甫红, 栾梦杰, 程雨欣, 等. 城市环境下智能手机车载GNSS/MEMS IMU紧组合定位算法[J]. 武汉大学学报(信息科学版), 2023, 48(7):1106-1116. |
| WANG Fuhong, LUAN Mengjie, CHENG Yuxin, et al. Smartphone GNSS/MEMS IMU tightly-coupled integration positioning method for vehicular navigation in urban conditions[J]. Geomatics and Information Science of Wuhan University, 2023, 48(7):1106-1116. | |
| [31] | 李正帅, 缪玲娟, 周志强, 等. 神经网络修正的速度约束辅助车载SINS定位算法[J]. 宇航学报, 2022, 43(9):1236-1245. |
| LI Zhengshuai, MIAO Lingjuan, ZHOU Zhiqiang, et al. Vehicle SINS positioning algorithm assisted by velocity constraint based on neural network modification[J]. Journal of Astronautics, 2022, 43(9):1236-1245. |
| [1] | 祝程程, 李真, 郭金运, 周茂盛, 李婉秋. 基于限定区域的纬度做差法解算宽刈幅测高数据交叉点位置[J]. 测绘学报, 2026, 55(4): 673-683. |
| [2] | 杨小磊, 肖云, 杨丽清, 洪晓东, 郭恩泽, 王翰. 时变重力场反演的改进基线法[J]. 测绘学报, 2026, 55(4): 708-720. |
| [3] | 李洋, 黄海军, 刘素兰, 吴晓辉, 刘琦, 庞琪沛, 吴云龙. 鄱阳湖流域未来百年陆地水储量异常预测及干旱风险评估:基于CMIP6驱动的Transformer-GRU模型[J]. 测绘学报, 2026, 55(4): 721-738. |
| [4] | 杨先圣. 高可用可见光智能定位技术研究[J]. 测绘学报, 2026, 55(4): 753-753. |
| [5] | 耿继军. 基于智能手机多传感器融合的行人室内外定位研究[J]. 测绘学报, 2026, 55(4): 754-754. |
| [6] | 马宏阳. 对流层模型增强的PPP-AR理论方法及在机载导航中的应用研究[J]. 测绘学报, 2026, 55(4): 756-756. |
| [7] | 刘航. 联合地基GNSS和星载GNSS-R的低纬电离层闪烁监测及预报方法研究[J]. 测绘学报, 2026, 55(4): 758-758. |
| [8] | 刘海锋. 基于GNSS无线电掩星的电离层突发E层时空分布研究[J]. 测绘学报, 2026, 55(4): 759-759. |
| [9] | 王家耀, 陈琳, 程士源, 王利军, 熊思奇. 人工智能赋能地图科学数智化[J]. 测绘学报, 2026, 55(3): 381-389. |
| [10] | 吴汤婷, 罗馨语, 卢立果, 刘站科, 超能芳. 基于GNSS和GRACE/GRACE-FO的陕甘宁地区水资源与水文干旱特征时空变化评价[J]. 测绘学报, 2026, 55(3): 439-450. |
| [11] | 马中民, 张双成, 周昕, 刘奇, 刘宁, 王恒利. 顾及地表反射率不确定性的风云三号GNSS-R洪涝监测方法:以8·2广东极端暴雨灾害为例[J]. 测绘学报, 2026, 55(3): 451-464. |
| [12] | 周瑞, 朱锋, 张小红. 基于先验位姿与运动编排的相机惯导外参标定方法[J]. 测绘学报, 2026, 55(3): 465-476. |
| [13] | 刘婧璇, 刘学习, 张克非, 杨超, 吴素芹, 朱守庆, 郭福东. 基于LSTM模型与加权最小二乘组合的日长变化预测方法[J]. 测绘学报, 2026, 55(3): 477-489. |
| [14] | 侯文韬, 肖云, 曹杰, 王宇康, 曹春婷, 王翰. 基于特征加权CatBoost模型的重力卫星反演地下水储量变化降尺度方法[J]. 测绘学报, 2026, 55(3): 490-501. |
| [15] | 徐磊. GNSS区域电离层精细化建模理论与方法研究[J]. 测绘学报, 2026, 55(3): 565-565. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||