


测绘学报 ›› 2025, Vol. 54 ›› Issue (12): 2206-2218.doi: 10.11947/j.AGCS.2025.20250213
谷宇鹏1( ), 刘万科1(), 张小红1,2, 胡捷1, 胡树杰1, 雷维豪1, 郑凯3
), 刘万科1(), 张小红1,2, 胡捷1, 胡树杰1, 雷维豪1, 郑凯3
收稿日期:2025-05-26
修回日期:2025-11-12
出版日期:2026-01-15
发布日期:2026-01-15
通讯作者:
刘万科
E-mail:ypgu1017@whu.edu.cn;wkliu@sgg.whu.edu.cn
作者简介:谷宇鹏(2001—),男,硕士生,研究方向为导航方法与系统。 E-mail:ypgu1017@whu.edu.cn
基金资助:
Yupeng GU1(), Wanke LIU1(), Xiaohong ZHANG1,2, Jie HU1, Shujie HU1, Weihao LEI1, Kai ZHENG3
Received:2025-05-26
Revised:2025-11-12
Online:2026-01-15
Published:2026-01-15
Contact:
Wanke LIU
E-mail:ypgu1017@whu.edu.cn;wkliu@sgg.whu.edu.cn
About author:GU Yupeng (2001—), male, postgraduate, majors in navigation techniques and systems. E-mail: ypgu1017@whu.edu.cn
Supported by:摘要:
GNSS能够提供高精度位置服务,然而在城市复杂场景下,受多径效应与非视距信号(NLOS)影响,GNSS观测质量与先验随机模型不匹配,会导致定位性能明显降低。基于鱼眼相机的方法能够利用天空视图信息,降低NLOS观测值的影响,但现有方案大多局限于语义分割层面的应用,未能充分利用图像中的高维环境特征。针对这一问题,本文提出了一种基于神经网络和鱼眼图像的GNSS随机模型生成方法,应用神经网络挖掘图像中反映GNSS观测环境的高维特征,并在交叉注意力层中紧密融合GNSS与图像特征,预测卫星观测值的随机模型。实测结果表明,本文方法能够提取鱼眼图像与GNSS观测环境之间的关联性,准确膨胀异常观测值的方差。并且,在鱼眼图像受误差因素影响的场景下,本文方法能够利用GNSS特征信息的辅助,减小图像误差对预测结果的影响。进一步,将本文方法应用于RTK/IMU组合导航系统,定位精度提升了32.9%,验证了本文方法能够显著减小异常观测值的影响,改善城市复杂场景下系统的定位性能。
中图分类号:
谷宇鹏, 刘万科, 张小红, 胡捷, 胡树杰, 雷维豪, 郑凯. 鱼眼图像支持的GNSS随机模型神经网络生成方法[J]. 测绘学报, 2025, 54(12): 2206-2218.
Yupeng GU, Wanke LIU, Xiaohong ZHANG, Jie HU, Shujie HU, Weihao LEI, Kai ZHENG. Neural network-based GNSS stochastic model generation method by fisheye images[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(12): 2206-2218.
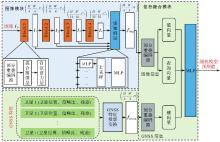
图1
F-GNet结构"


图2
GNSS特征投影过程"
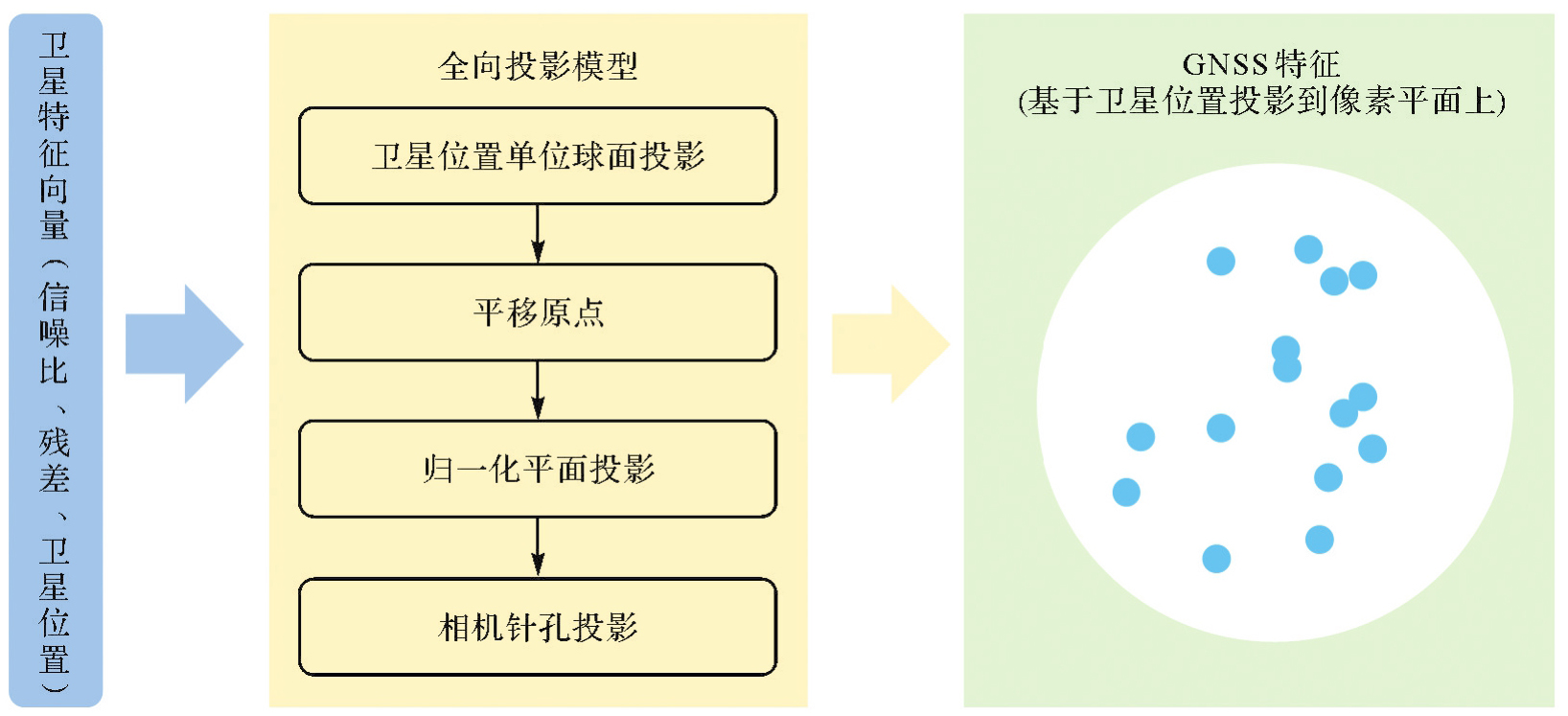
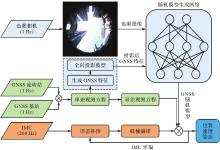
图3
F-GNet辅助的RTK/IMU紧组合导航系统架构"


图4
试验数据采集平台"
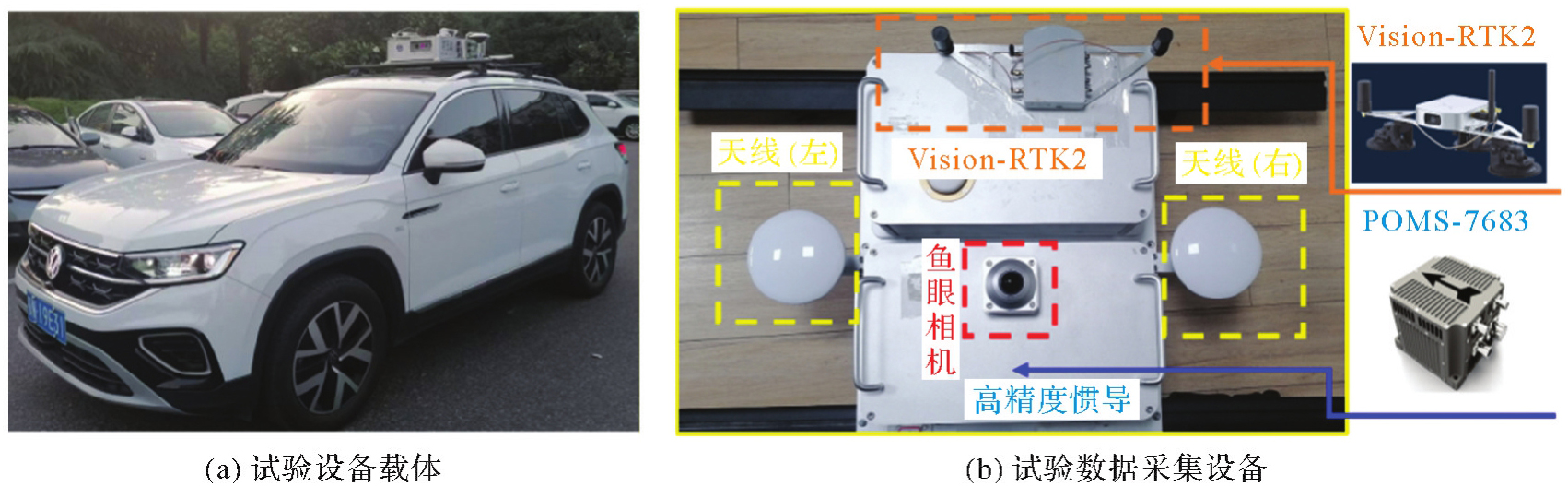
表1
试验中传感器参数"
| 传感器类型 | 传感器说明 | 传感器参数 |
|---|---|---|
| POMS-7683 | 高精度组合导航设备 | 陀螺零偏不稳定性:0.1°/h |
| 数据频率:200 Hz | ||
| ICM-20602 | 低成本IMU | 陀螺零偏不稳定性:10°/h |
| 数据频率:200 Hz | ||
| Ublox F9P | 低成本GNSS接收机 | 卫星系统:G/R/E/C/J |
| 数据频率:1 Hz | ||
| 鱼眼相机 | 相机 | 图像分辨率:2048×2048 |
| 数据频率:1 Hz |
图5
试验数据采集轨迹"

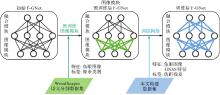
图6
迁移学习的流程"
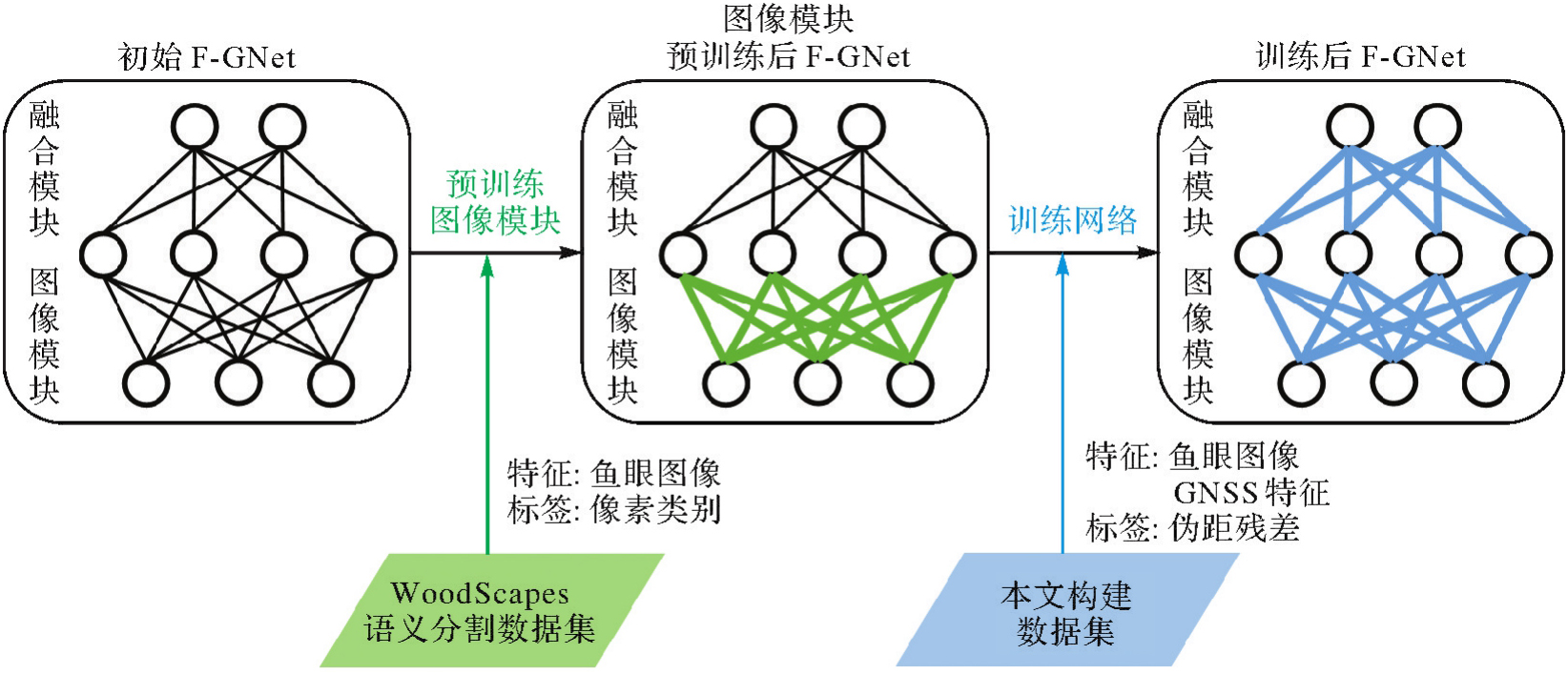
表2
GNSS基础解算配置"
| 项目 | 配置 |
|---|---|
| 观测数据 | GPS(L1、L2) |
| BDS-2(B1I、B2I) | |
| BDS-3(B1I) | |
| Galileo(E1、E5) | |
| QZSS(L1、L2) | |
| 星历 | 广播星历 |
| 截止高度角/(°) | 15 |
| 截止信噪比/dBHz | 25 |
表3
不同网络设计方案的性能对比"
| 网络设计 | GNSS随机模型RMSE/m |
|---|---|
| GI:图像特征+GNSS特征 | 1.79 |
| CI:交叉注意力层+图像特征 | 3.20 |
| CGI:交叉注意力层+图像特征+GNSS特征 | 1.59 |
表4
交叉注意力层模态设置对F-GNet的性能影响"
| 网络结构 | GNSS随机模型RMSE/m |
|---|---|
| 模态A | 1.62 |
| 模态B | 1.59 |
| 模态C | 5.52 |

图7
不同典型场景天空与卫星遮挡视图"

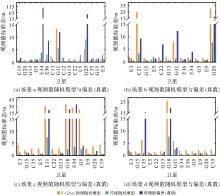
图8
不同典型场景下基于随机模型的先验误差与观测值偏差(真值)"
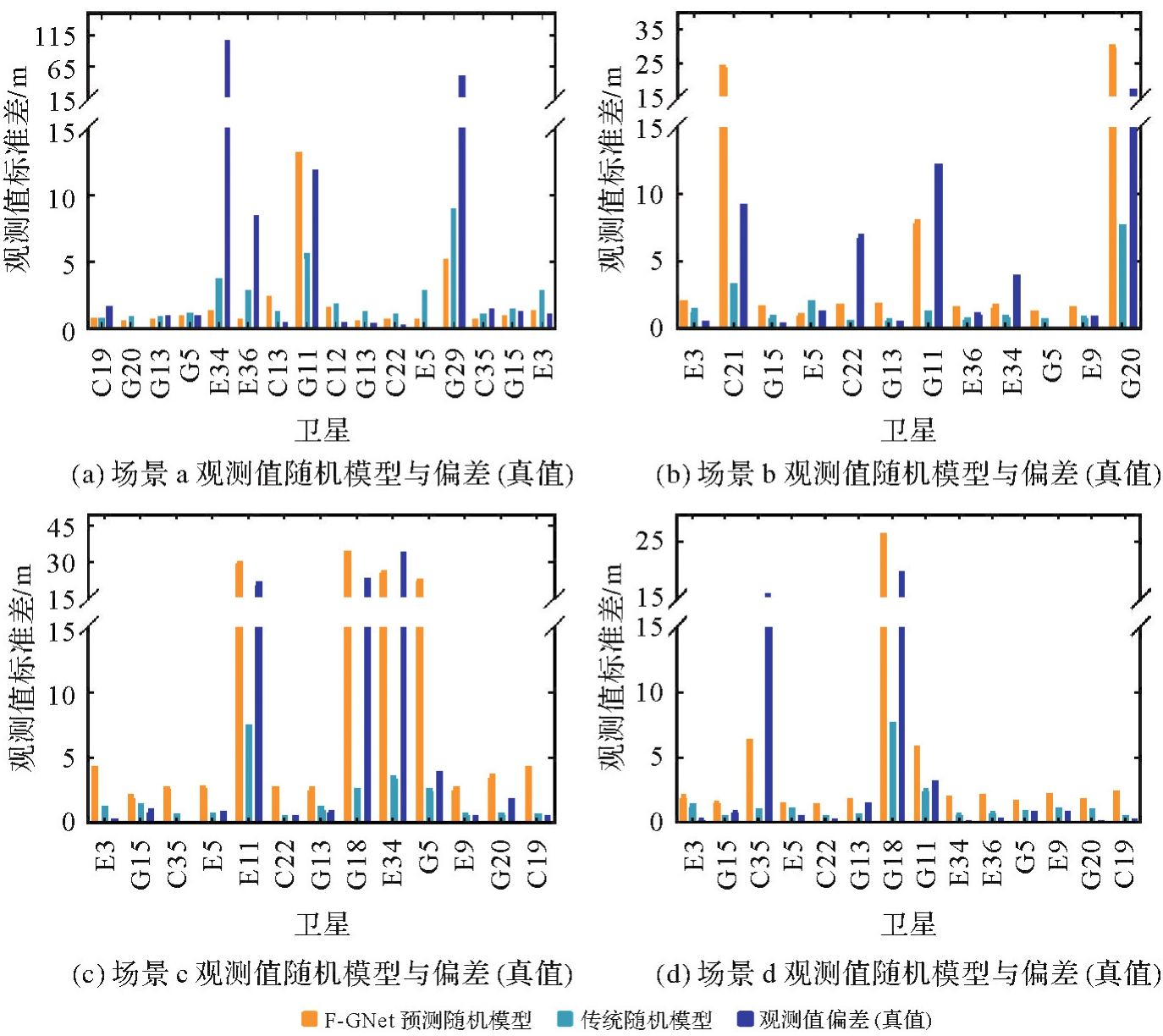
表5
典型场景单点定位偏差与PDOP"
| 场景 | 定位偏差/m | PDOP | ||||
|---|---|---|---|---|---|---|
| Trad | NLOS-seg | F-GNet | Trad | NLOS-seg | F-GNet | |
| 场景a | 16.935 | N/A | 3.101 | 1.688 | N/A | 1.688 |
| 场景b | 16.082 | 12.425 | 7.227 | 1.792 | 2.471 | 1.792 |
| 场景c | 6.661 | 4.605 | 2.892 | 1.585 | 1.877 | 1.585 |
| 场景d | 6.536 | 3.840 | 2.096 | 1.521 | 1.960 | 1.521 |

图9
基于随机模型的先验误差与观测值偏差(真值)的时间序列"
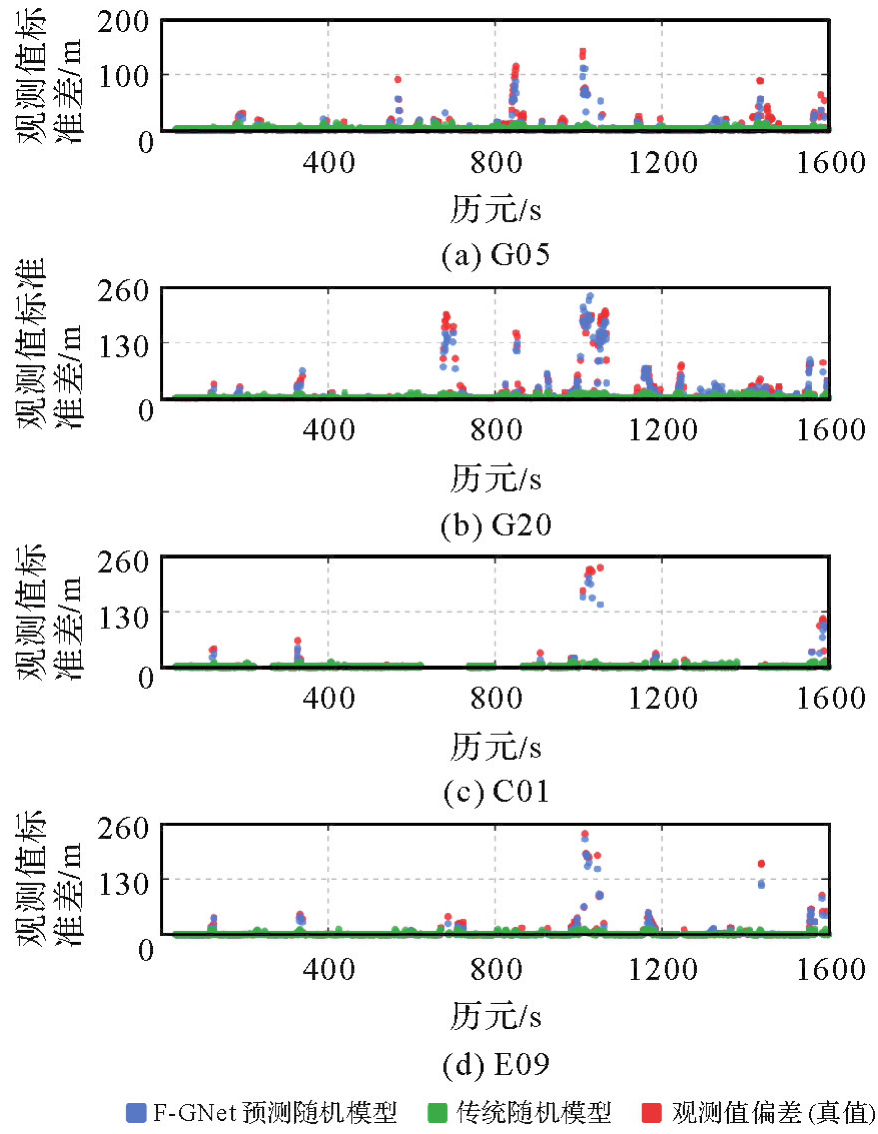
表6
GNSS随机模型精度"
| 方法 | GNSS随机模型RMSE/m |
|---|---|
| 传统随机模型 | 10.34 |
| F-GNet | 1.59 |
表7
F-GNet运行耗时"
| 最大耗时 | 最小耗时 | 平均耗时 |
|---|---|---|
| 21.1 | 8.8 | 9.2 |
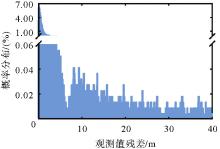
图10
GNSS观测值双差伪距残差分布"
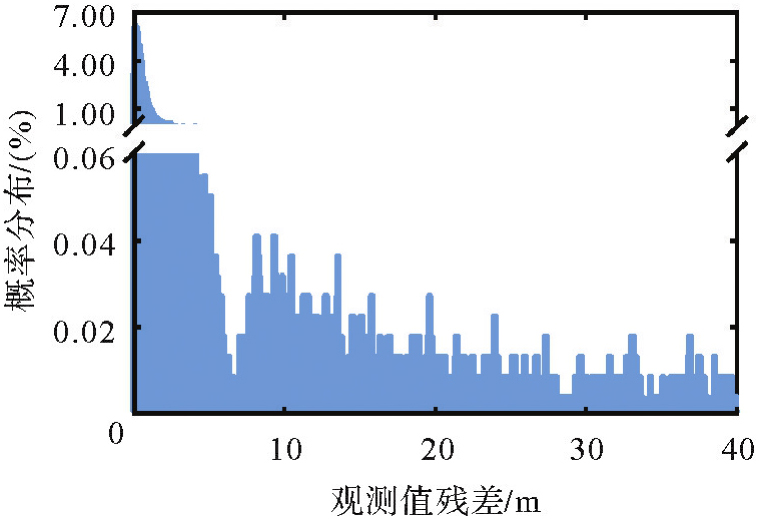

图11
定位误差序列"
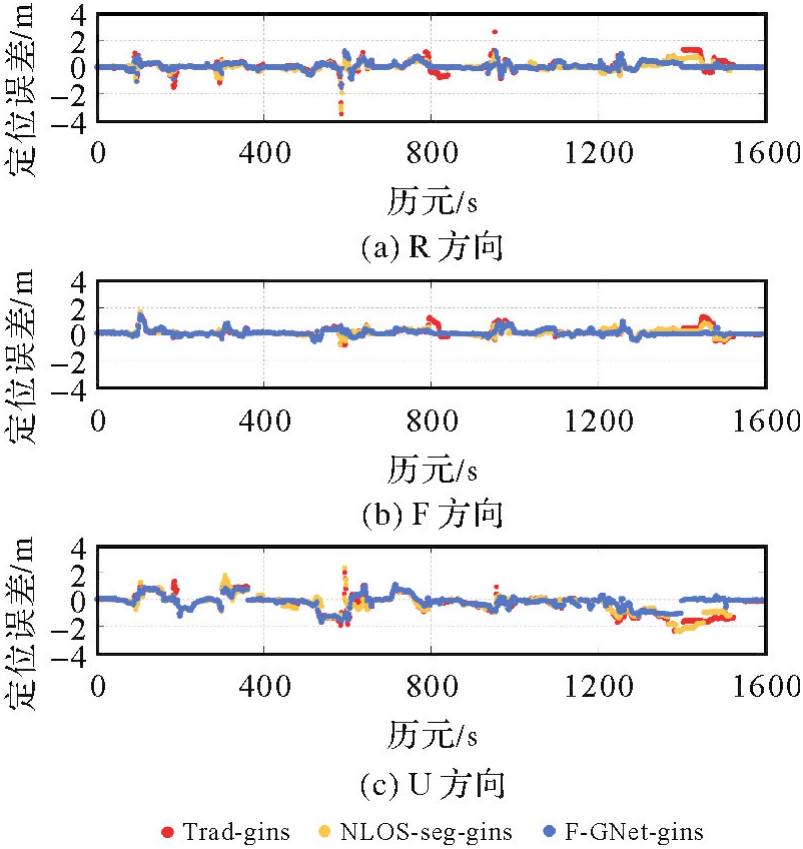
表8
不同方案的定位精度"
| 解算方案 | 定位RMSE/m | 提升率/(%) | |||
|---|---|---|---|---|---|
| R | F | U | 3D | ||
| Trad-gins | 0.403 | 0.338 | 0.739 | 0.907 | — |
| NLOS-seg-gins | 0.280 | 0.266 | 0.701 | 0.801 | 11.7 |
| F-GNet-gins | 0.246 | 0.248 | 0.499 | 0.609 | 32.9 |
图12
三维定位误差累积分布"
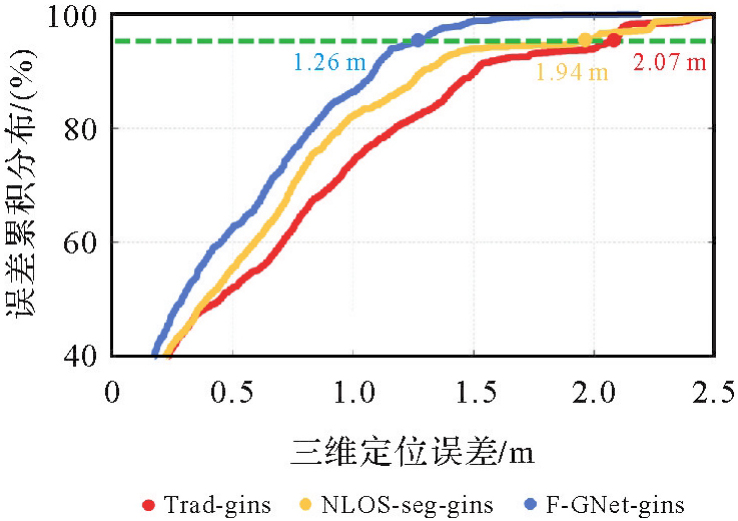
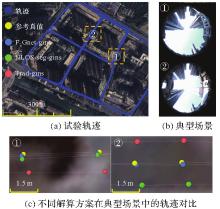
图13
不同解算方案轨迹对比"

| [1] |
耿江辉, 常华, 郭将, 等. 面向城市复杂环境的3种多频多系统GNSS单点高精度定位方法及性能分析[J]. 测绘学报, 2020, 49(1): 1-13. DOI: .
doi: 10.11947/j.AGCS.2020.20190106 |
|
GENG Jianghui, CHANG Hua, GUO Jiang, et al. Three multi-frequency and multi-system GNSS high-precision point positioning methods and their performance in complex urban environment[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(1): 1-13. DOI: .
doi: 10.11947/j.AGCS.2020.20190106 |
|
| [2] | 刘慧娟, 党亚民, 王潜心. 多星座实时导航中一种快速次优的选星方法[J]. 测绘科学, 2013, 38(1): 20-22. |
| LIU Huijuan, DANG Yamin, WANG Qianxin. A fast sub-optimal satellite selection method in multi-constellation real-time navigation[J]. Science of Surveying and Mapping, 2013, 38(1): 20-22. | |
| [3] | 黄观文, 雷哲哲, 王进, 等. 亚太区域不同遮挡情形下多系统组合PPP定位效能分析[J]. 大地测量与地球动力学, 2018, 38(6): 562-567. |
| HUANG Guanwen, LEI Zhezhe, WANG Jin, et al. Efficiency analysis of multi-GNSS combined PPP in complex conditions of Asia-Pacific region[J]. Journal of Geodesy and Geodynamics, 2018, 38(6): 562-567. | |
| [4] | ZHENG Fu, LI Qingcheng, WANG Jiale, et al. GNSS NLOS detection method based on stacking ensemble learning and applications in smartphones[J]. GPS Solutions, 2024, 28(3): 129. |
| [5] | SUN Rui, WANG Guanyu, ZHANG Wenyu, et al. A gradient boosting decision tree based GPS signal reception classification algorithm[J]. Applied Soft Computing, 2020, 86: 105942. |
| [6] | LI Xin, XU Qi, LI Xingxing, et al. Improving PPP-RTK-based vehicle navigation in urban environments via multilayer perceptron-based NLOS signal detection[J]. GPS Solutions, 2023, 28(1): 29. |
| [7] | YOZEVITCH R, BEN MOSHE B, WEISSMAN A. A robust GNSS LOS/NLOS signal classifier[J]. Navigation, 2016, 63(4): 429-442. |
| [8] |
朱彬, 杨诚, 刘岩. GNSS多径信号3种非监督学习法分析与比较[J]. 测绘学报, 2021, 50(12): 1762-1771. DOI: .
doi: 10.11947/j.AGCS.2021.20210233 |
|
ZHU Bin, YANG Cheng, LIU Yan. Analysis and comparison of three unsupervised learning clustering methods for GNSS multipath signals[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(12): 1762-1771. DOI: .
doi: 10.11947/j.AGCS.2021.20210233 |
|
| [9] | ZHANG Xiaohong, WANG Xinyu, LIU Wanke, et al. A reliable NLOS error identification method based on LightGBM driven by multiple features of GNSS signals[J]. Satellite Navigation, 2024, 5(1): 31. |
| [10] | ZENG Kungan, LI Zhenni, ZHAO Haoli, et al. A spatiotemporal information-driven cross-attention model with sparse representation for GNSS NLOS signal classification[J]. IEEE Internet of Things Journal, 2024, 11(19): 31892-31908. |
| [11] | WANG Lei, GROVES P D, ZIEBART M K. Smartphone shadow matching for better cross-street GNSS positioning in urban environments[J]. Journal of Navigation, 2015, 68(3): 411-433. |
| [12] | NG H F, ZHANG Guohao, HSU L T. Robust GNSS shadow matching for smartphones in urban canyons[J]. IEEE Sensors Journal, 2021, 21(16): 18307-18317. |
| [13] | XIN Shaoming, GENG Jianghui, ZHANG Guohao, et al. 3D-mapping-aided PPP-RTK aiming at deep urban canyons[J]. Journal of Geodesy, 2022, 96: 78. |
| [14] | NG H F, ZHANG G, HSU L T. Range-based 3D mapping aided GNSS with NLOS correction based on skyplot with building boundaries[C]//Proceedings of 2019 ION Pacific PNT Meeting, Honolulu: ION, 2019: 737-751. |
| [15] | ZHANG Liyuan, NG H F, ZHANG Guohao, et al. Ray-tracing correction for GNSS velocity estimation using Doppler frequency: a feasibility analysis[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 1-10. |
| [16] | WEN Weisong, BAI Xiwei, KAN Y C, et al. Tightly coupled GNSS/INS integration via factor graph and aided by fish-eye camera[J]. IEEE Transactions on Vehicular Technology, 2019, 68(11): 10651-10662. |
| [17] | SUZUKI T, KUBO N. N-LOS GNSS signal detection using fisheye camera for vehicle navigation in urban environments[C]//Proceedings of 2014 International Technical Meeting of the Satellite Division of the Institute of Navigation. Tampa: ION, 2014: 1897-1906. |
| [18] | 袁蕾, 张守建, 王景荣, 等. 城市遮挡环境下天空图辅助的GNSS/INS组合导航[J]. 测绘科学, 2023, 48(9): 1-8. |
| YUAN Lei, ZHANG Shoujian, WANG Jingrong, et al. GNSS/INS integrated navigation aided by sky images in urban occlusion environment[J]. Science of Surveying and Mapping, 2023, 48(9): 1-8. | |
| [19] | 田哲铭, 李旭, 胡悦, 等. 城市峡谷下视觉辅助的GNSS/INS多阶段定位方法[J]. 仪器仪表学报, 2024, 45(4): 217-225. |
| TIAN Zheming, LI Xu, HU Yue, et al. Multi-stage localization method based on camera-aided GNSS/INS integration in urban canyon areas[J]. Chinese Journal of Scientific Instrument, 2024, 45(4): 217-225. | |
| [20] | MARAIS J, KAZIM S A, COCHERIL Y, et al. Multipath and NLOS detection based on the combination of CN0 values and a fisheye camera[C]//Proceedings of 2020 European Navigation Conference. Dresden: IEEE, 2020: 1-13. |
| [21] | HU Runzhi, WEN Weisong, HSU L. Fisheye camera aided GNSS NLOS detection and learning-based pseudorange bias correction for intelligent vehicles in urban canyons[C]//Proceedings of 2023 International Conference on Intelligent Transportation Systems. Bilbao: IEEE, 2023: 6088-6095. |
| [22] | XIE Enze, WANG Wenhai, YU Zhiding, et al. SegFormer: simple and efficient design for semantic segmentation with Transformers[C]//Proceedings of the 35th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021. |
| [23] | SCARAMUZZA D. Omnidirectional camera[M]//IKEUCHI K. Computer vision: a reference guide. Cham: Springer International Publishing, 2021: 900-909. |
| [24] | OTH L, FURGALE P, KNEIP L, et al. Rolling shutter camera calibration[C]//Proceedings of 2013 IEEE Conference on Computer Vision and Pattern Recognition. Portland: IEEE, 2013: 1360-1367. |
| [25] | 蔡亲青, 朱锋, 陈曦, 等. 高度角与信噪比混合的GNSS随机模型精化及其对RTK定位性能的影响[J]. 全球定位系统, 2023, 48(1): 24-31. |
| CAI Qinqing, ZHU Feng, CHEN Xi, et al. Refinement of GNSS stochastic model combining elevation angle and SNR and its effect on RTK positioning performance[J]. GNSS World of China, 2023, 48(1): 24-31. | |
| [26] | 张小红, 陶贤露, 王颖喆, 等. 城市场景智能手机GNSS/MEMS融合车载高精度定位[J]. 武汉大学学报(信息科学版), 2022, 47(10): 1740-1749. |
| ZHANG Xiaohong, TAO Xianlu, WANG Yingzhe, et al. MEMS-enhanced smartphone GNSS high-precision positioning for vehicular navigation in urban conditions[J]. Geomatics and Information Science of Wuhan University, 2022, 47(10): 1740-1749. | |
| [27] | RAMACHANDRAN S, SISTU G, MCDONALD J, et al. Woodscape fisheye semantic segmentation for autonomous driving—CVPR 2021 OmniCV Workshop Challenge[EB/OL]. [2025-04-05]. https://arxiv.org/pdf/2107.08246. |
| [28] | KIRILLOV A, MINTUN E, RAVI N, et al. Segment anything[C]//Proceedings of 2023 IEEE/CVF International Conference on Computer Vision. Paris: IEEE, 2023: 3992-4003. |
| [1] | 孙壮, 刘坡, 翟亮, 何宇, 张祖涛. 一种基于三分支注意力网络的面状地理实体自监督匹配方法[J]. 测绘学报, 2026, 55(1): 169-180. |
| [2] | 张付兵, 孙群, 徐青, 马京振, 黄文君, 陈若虚. 随机森林和图神经网络支持下的河系自动分级与选取方法[J]. 测绘学报, 2025, 54(9): 1697-1711. |
| [3] | 程青, 汪博轩, 张洪艳. DRformer:一种渐进式耦合多尺度CNN与浓缩注意力Transformer的高光谱图像超分辨率方法[J]. 测绘学报, 2025, 54(7): 1230-1242. |
| [4] | 邹晨曦, 石震, 刘迪, 杨子毅. 基于BP神经网络模型的光纤陀螺全站仪温度补偿算法[J]. 测绘学报, 2025, 54(6): 1021-1030. |
| [5] | 赵一鸣, 胡克林, 涂可龙, 卿雅娴, 杨超, 祁昆仑, 吴华意. 基于SAR与光学遥感影像融合的多标签场景分类方法[J]. 测绘学报, 2025, 54(5): 911-923. |
| [6] | 黄哲琨, 钱海忠, 蔡中祥, 王骁, 王俊威, 孔令辉. 基于图神经网络的多尺度网状河系分类匹配方法[J]. 测绘学报, 2025, 54(2): 371-384. |
| [7] | 宋瀚昀, 李昕, 黄观文, 李航. 无人机气压计测高模型精化及GNSS/SINS组合定位增强[J]. 测绘学报, 2025, 54(11): 1980-1991. |
| [8] | 潘雄, 赵子瑄, 平常, 金丽宏, 刘立龙. 联合半参数规则学习的电离层TEC预报[J]. 测绘学报, 2025, 54(10): 1741-1756. |
| [9] | 王艳军, 唐徐超, 王成, 蔡恒藩. 基于道路拓扑关联特征的城乡道路面精细提取网络[J]. 测绘学报, 2025, 54(1): 75-89. |
| [10] | 吕继超, 张瑞, 何旭, 洪瑞凯, 沙马阿各, 刘国祥. 广域滑坡易发性多分支网络评估及动态变化分析[J]. 测绘学报, 2025, 54(1): 104-122. |
| [11] | 唐佳怡, 童晓冲, 邱春平, 雷亚现, 雷毅, 宋好帅. 基于场景图的遥感场景检索方法[J]. 测绘学报, 2025, 54(1): 123-135. |
| [12] | 龚良雄, 李星华, 程远明, 赵兴友, 谢仁平, 王红根. 时空差异增强与自适应特征融合的轻量级遥感影像变化检测网络[J]. 测绘学报, 2025, 54(1): 136-153. |
| [13] | 刘万增, 陈杭, 任加新, 张兆江, 李然, 赵婷婷, 翟曦, 朱秀丽. 基于混合智能的街景影像知识提取方法[J]. 测绘学报, 2024, 53(9): 1817-1828. |
| [14] | 张付兵, 孙群, 马京振, 孙士杰, 温伯威. 融合全局和局部特征的建筑物形状智能分类方法[J]. 测绘学报, 2024, 53(9): 1842-1852. |
| [15] | 林贻若, 余科根, 朱飞洋, 布金伟. 一种基于GWO-BP神经网络的RSSI测距算法[J]. 测绘学报, 2024, 53(8): 1564-1573. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||