


测绘学报 ›› 2025, Vol. 54 ›› Issue (12): 2194-2205.doi: 10.11947/j.AGCS.2025.20250252
高佳鑫1( ), 隋心1,2, 王长强1, 徐爱功1(), 史政旭1
), 隋心1,2, 王长强1, 徐爱功1(), 史政旭1
收稿日期:2025-06-20
修回日期:2025-11-04
出版日期:2026-01-15
发布日期:2026-01-15
通讯作者:
徐爱功
E-mail:gao_jx9903@163.com;xu_ag@126.com
作者简介:高佳鑫(1999—),男,博士,研究方向为卫星定位与导航。 E-mail:gao_jx9903@163.com
基金资助:
Jiaxin GAO1(), Xin SUI1,2, Changqiang WANG1, Aigong XU1(), Zhengxu SHI1
Received:2025-06-20
Revised:2025-11-04
Online:2026-01-15
Published:2026-01-15
Contact:
Aigong XU
E-mail:gao_jx9903@163.com;xu_ag@126.com
About author:GAO Jiaxin (1999—), male, PhD, majors in satellite positioning and navigation. E-mail: gao_jx9903@163.com
Supported by:摘要:
针对动态、退化、大规模杂乱场景中仅基于点云处理的回环检测方法稳健性差,且现有方法普遍存在平移敏感性弱和计算效率低的问题,本文提出了一种基于稳定静态点云簇词袋的回环检测方法。首先,针对预处理后的点云从环境结构角度评价其退化情况,并设计稳健的点云簇筛选方案获取稳定静态点云簇,以削弱动态目标干扰。然后,为减少回环信息冗余,采用模糊综合评价算法适应性地进行关键帧筛选。最后,基于稳定静态点云簇和关键帧筛选结果,提出一种基于点云簇局部描述子词袋的回环检测算法,利用稳定点云簇间相对空间关系以及属性联系提高词袋信息的平移及旋转敏感性,进而保证回环检测在退化及杂乱场景中的实际性能。试验结果表明,在实测场景中,本文方法能够稳健检测正确回环关系,且非回环帧误检率仅为5.56%,处理单帧关键帧耗时为0.052 8 s;相较于BoW3D、ISC、SGLC 3个同类对比方法,回环帧正确检测率平均提高了75.73%,非回环帧误检率平均降低了81.93%,且处理过程具备较强实时性,并展现出更强的稳健性和适用性。
中图分类号:
高佳鑫, 隋心, 王长强, 徐爱功, 史政旭. 稳定静态点云簇支持的LiDAR SLAM回环检测方法[J]. 测绘学报, 2025, 54(12): 2194-2205.
Jiaxin GAO, Xin SUI, Changqiang WANG, Aigong XU, Zhengxu SHI. Loop closure detection method for LiDAR SLAM supported by stable static point cloud clusters[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(12): 2194-2205.
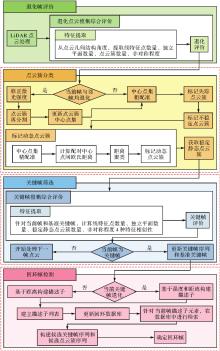
图1
基于稳定静态点云簇词袋的LCD方法流程"

图2
试验平台及场景"
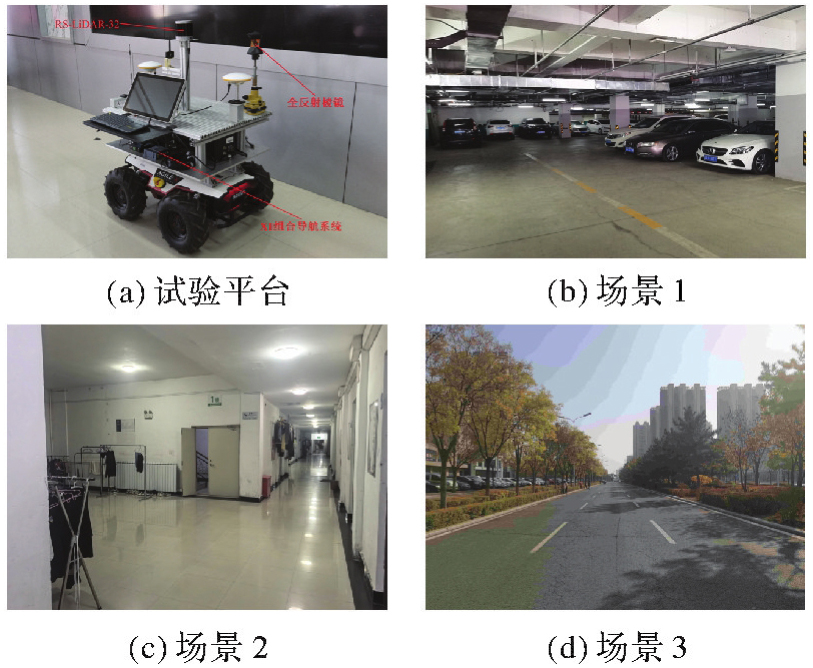

图3
场景平面结构及载体运动轨迹"
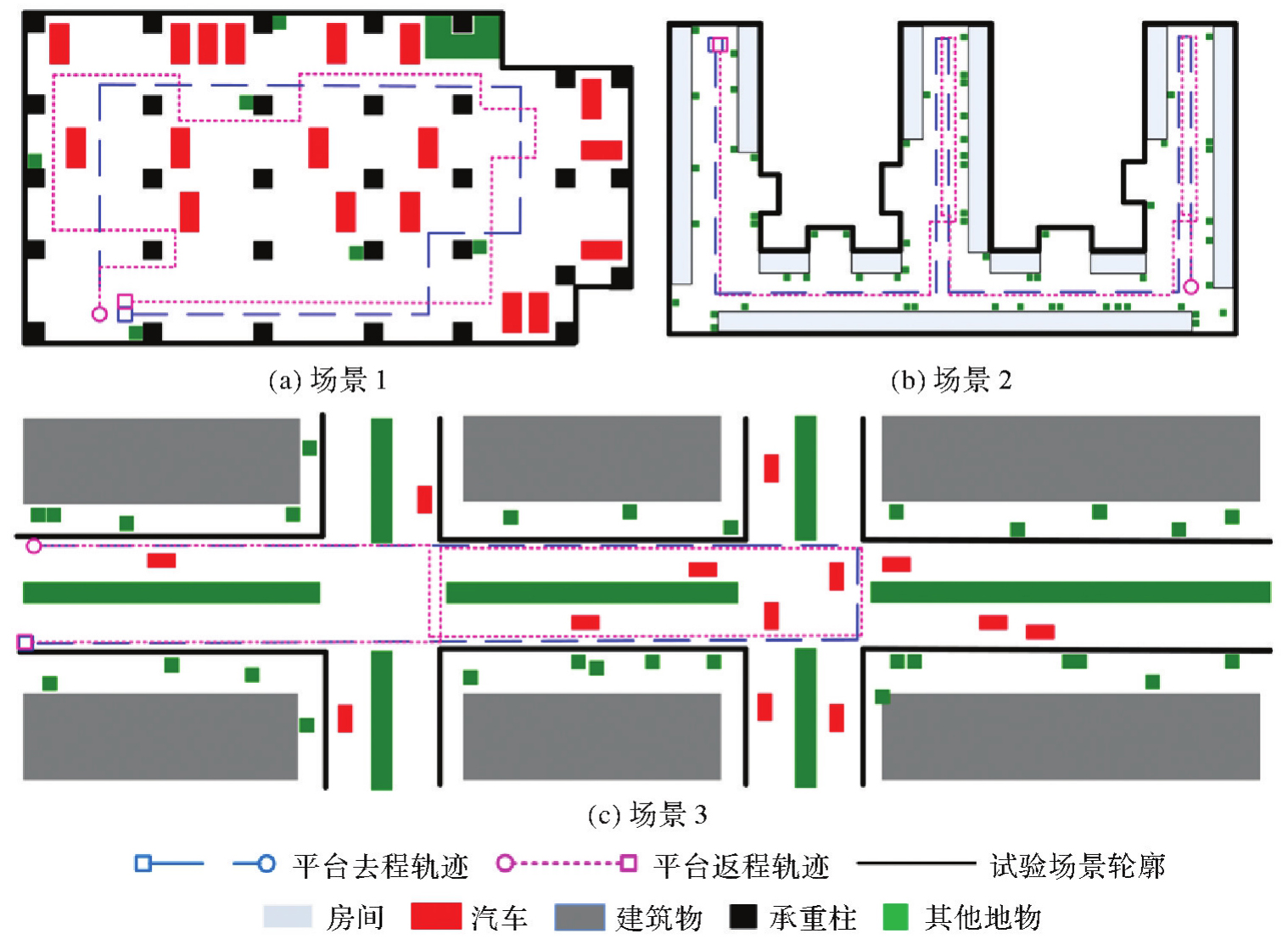
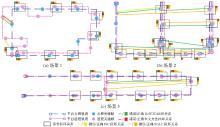
图4
4种方法在3个场景的LCD效果"

表1
试验参考基准"
| 场景 | 去程关键帧 | 返程关键帧 | 返程回环帧 | 返程非回环帧 |
|---|---|---|---|---|
| 1 | 12 | 15 | 9 | 6 |
| 2 | 17 | 17 | 15 | 2 |
| 3 | 15 | 17 | 13 | 4 |
表2
4种方法在3个场景的检测性能指标"
| 方法 | 场景 | ηr | ηe | t |
|---|---|---|---|---|
| BoW3D | 1 | 1.000 0 | 0.166 7 | 0.053 8 |
| 2 | 0.733 3 | 1.000 0 | 0.056 7 | |
| 3 | 1.000 0 | 0.250 0 | 0.073 4 | |
| 均值 | 0.911 1 | 0.472 2 | 0.061 3 | |
| ISC | 1 | 0.000 0 | 0.000 0 | 0.071 0 |
| 2 | 0.266 7 | 0.500 0 | 0.072 6 | |
| 3 | 0.692 3 | 0.000 0 | 0.096 2 | |
| 均值 | 0.319 7 | 0.166 7 | 0.079 9 | |
| SGLC | 1 | 1.000 0 | 0.333 3 | 0.045 6 |
| 2 | 0.866 7 | 1.000 0 | 0.046 1 | |
| 3 | 1.000 0 | 0.500 0 | 0.050 2 | |
| 均值 | 0.955 6 | 0.611 1 | 0.047 3 | |
| 本文方法 | 1 | 1.000 0 | 0.166 7 | 0.046 7 |
| 2 | 1.000 0 | 0.000 0 | 0.048 9 | |
| 3 | 1.000 0 | 0.000 0 | 0.062 8 | |
| 均值 | 1.000 0 | 0.055 6 | 0.052 8 |
图5
两种算法的定位轨迹"
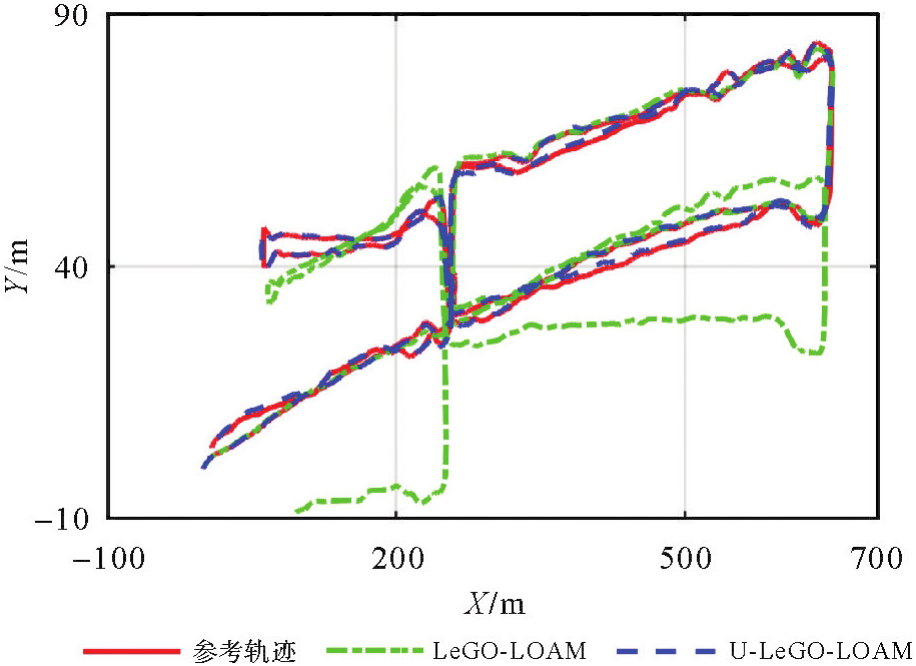
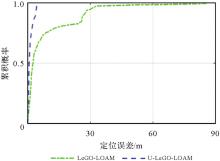
图6
两种算法的定位误差CDF"
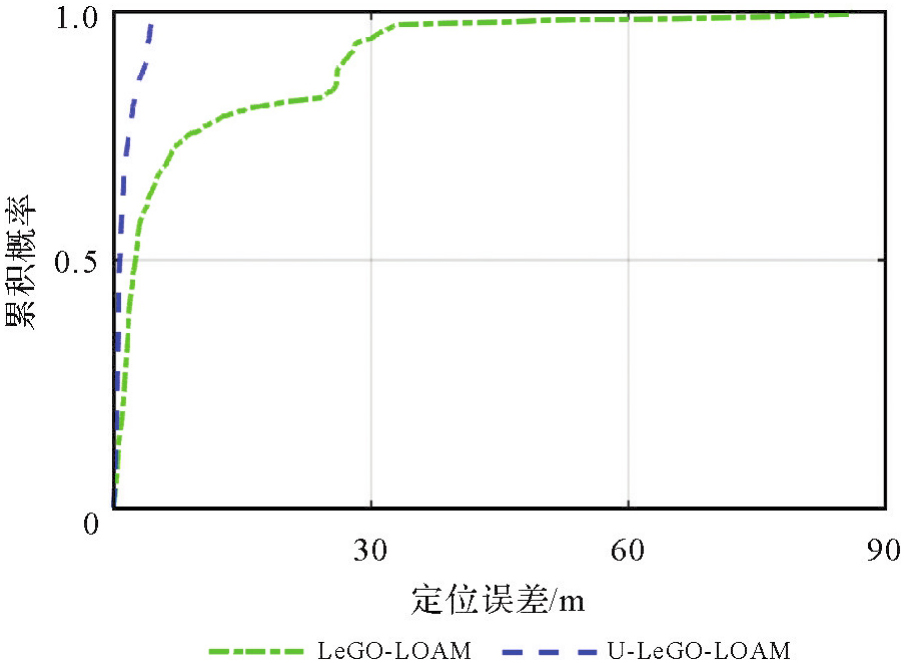
表3
两种算法的定位误差和处理效率"
| 算法 | RMSE/m | ME/m | 单帧耗时/s |
|---|---|---|---|
| LeGO-LOAM | 13.456 9 | 86.224 1 | 0.037 2 |
| U-LeGO-LOAM | 1.249 9 | 4.528 8 | 0.047 6 |
| [1] | YAROVOI A, CHO Y K. Review of simultaneous localization and mapping (SLAM) for construction robotics applications[J]. Automation in Construction, 2024, 162: 105344-105371. |
| [2] |
蔺小虎, 杨鑫, 姚顽强, 等. 面向复杂地下空间的多源传感器数据动态加权融合SLAM方法[J]. 测绘学报, 2025, 54(3): 523-535. DOI: .
doi: 10.11947/j.AGCS.2025.20230586 |
|
LIN Xiaohu, YANG Xin, YAO Wanqang, et al. A dynamic weighted fusion SLAM method using multi-source sensor data in complex underground spaces[J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(3): 523-535. DOI: .
doi: 10.11947/j.AGCS.2025.20230586 |
|
| [3] | AL-TAWIL B, HEMPEL T, ABDELRAHMAN A, et al. A review of visual SLAM for robotics: evolution, properties, and future applications[J]. Frontiers in Robotics and AI, 2024, 11: 1347985-1348002. |
| [4] |
李帅鑫, 李九人, 田滨, 等. 面向点云退化的隧道环境的无人车激光SLAM方法[J]. 测绘学报, 2021, 50(11): 1487-1499. DOI: .
doi: 10.11947/j.AGCS.2021.20210248 |
|
LI Shuaixin, LI Jiuren, TIAN Bin, et al. A laser SLAM method for unmanned vehicles in point cloud degenerated tunnel environments[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1487-1499. DOI: .
doi: 10.11947.AGCS.2021.20210248 |
|
| [5] | YUE Xiangdi, ZHANG Yihuan, CHEN Jiawei, et al. LiDAR-based SLAM for robotic mapping: state of the art and new frontiers[J]. Industrial Robot: the International Journal of Robotics Research and Application, 2024, 51(2): 196-205. |
| [6] | WU Haoyu, CHEN Yinglong, YANG Qiming, et al. A review of underwater robot localization in confined spaces[J]. Journal of Marine Science and Engineering, 2024, 12(3): 428. |
| [7] | SHAN Tixiao, ENGLOT B. LeGO-LOAM: lightweight and ground-optimized LiDAR odometry and mapping on variable terrain[C]//Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid: IEEE, 2018: 4758-4765. |
| [8] | SHAN Tixiao, ENGLOT B, MEYERS D, et al. LIO-SAM: tightly-coupled LiDAR inertial odometry via smoothing and mapping[C]//Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 5135-5142. |
| [9] | KIM G, KIM A. Scan context: egocentric spatial descriptor for place recognition within 3D point cloud map[C]//Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 4802-4809. |
| [10] | KIM G, CHOI S, KIM A. Scan Context++: structural place recognition robust to rotation and lateral variations in urban environments[J]. IEEE Transactions on Robotics, 2022, 38(3): 1856-1874. |
| [11] | WANG Ying, SUN Zezhou, XU Chengzhong, et al. LiDAR Iris for loop-closure detection[C]//Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 5769-5775. |
| [12] | CUI Yunge, CHEN X, ZHANG Yinlong, et al. BoW3D: bag of words for real-time loop closing in 3D LiDAR SLAM[J]. IEEE Robotics and Automation Letters, 2023, 8(5): 2828-2835. |
| [13] | JI Xingliang, ZUO Lin, ZHANG Changhua, et al. LLOAM: LiDAR odometry and mapping with loop-closure detection based correction[C]//Proceedings of 2019 IEEE International Conference on Mechatronics and Automation. Tianjin: IEEE, 2019: 2475-2480. |
| [14] | WANG Han, WANG Chen, XIE Lihua. Intensity scan context: coding intensity and geometry relations for loop closure detection[C]//Proceedings of 2020 IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 2095-2101. |
| [15] | 潘锋, 蒋林, 胡雨欣, 等. 基于点云强度与高度信息的回环检测算法[J]. 武汉科技大学学报, 2022, 45(6): 464-471. |
| PAN Feng, JIANG Lin, HU Yuxin, et al. Loop closure detection algorithm based on point cloud intensity and height information[J]. Journal of Wuhan University of Science and Technology, 2022, 45(6): 464-471. | |
| [16] | WANG Neng, CHEN Xieyuanli, SHI Chenghao, et al. SGLC: semantic graph-guided coarse-fine-refine full loop closing for LiDAR SLAM[J]. IEEE Robotics and Automation Letters, 2024, 9(12): 11545-11552. |
| [17] | NGUYEN T M, YUAN Shenghai, CAO Muqing, et al. Viral SLAM: tightly coupled camera-IMU-UWB-LiDAR SLAM[EB/OL]. [2025-04-01]. https://arxiv.org/pdf/2105.03296. |
| [18] | LIN Jiarong, ZHENG Chunran, XU Wei, et al. R2LIVE: a robust, real-time, LiDAR-inertial-visual tightly-coupled state estimator and mapping[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 7469-7476. |
| [19] | LEVINSON J, THRUN S. Unsupervised calibration for multi-beam lasers[M]//Experimental robotics. Berlin: Springer, 2014: 179-193. |
| [20] | HONG S, KO H, KIM J. VICP: velocity updating iterative closest point algorithm[C]//Proceedings of 2010 IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010: 1893-1898. |
| [21] | FAN Weiwei, LIU Xinyi, ZHANG Yongjun, et al. Airborne LiDAR point cloud filtering algorithm based on supervoxel ground saliency[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2024, X-2-2024: 73-79. |
| [22] | HIMMELSBACH M, HUNDELSHAUSEN F V, WUENSCHE H J. Fast segmentation of 3D point clouds for ground vehicles[C]//Proceedings of 2010 IEEE Intelligent Vehicles Symposium. La Jolla: IEEE, 2010: 560-565. |
| [23] | 徐爱功, 高佳鑫, 隋心, 等. 退化环境下LiDAR里程计定位方法[J]. 地球信息科学学报, 2024, 26(10): 2316-2334. |
| XU Aigong, GAO Jiaxin, SUI Xin, et al. LiDAR odometry positioning method for degenerate environment[J]. Journal of Geo-information Science, 2024, 26(10): 2316-2334. | |
| [24] | XU Aigong, GAO Jiaxin, SUI Xin, et al. LiDAR dynamic target detection based on multidimensional features[J]. Sensors, 2024, 24(5): 1369. |
| [25] |
刘康, 仇培元, 刘希亮, 等. 利用词向量模型分析城市道路交通空间相关性[J]. 测绘学报, 2017, 46(12): 2032-2040. DOI: .
doi: 10.11947/j.AGCS.2017.20170166 |
|
LIU Kang, QIU Peiyuan, LlU Xiliang, et al. Measuring traffic correlations in urban road system using word embedding model[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(12): 2032-2040. DOI: .
doi: 10.11947/j.AGCS.2017.20170166 |
|
| [26] | OZENDI M, AKCA D, TOPAN H. A point cloud filtering method based on anisotropic error model[J]. The Photogrammetric Record, 2023, 38(184): 460-497. |
| [27] |
王俊森, 金绍华, 边刚, 等. 结合不确定度与密度聚类算法的多波束异常值自动滤波算法[J]. 测绘学报, 2023, 52(10): 1669-1678. DOI: .
doi: 10.11947/j.AGCS.2023.20220579 |
|
WANG Junsen, JIN Shaohua, BIAN Gang, et al. A multi-beam outlier automatic filtering algorithm combining uncertainty and density clustering method[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(10): 1669-1678. DOI: .
doi: 10.11947/j.AGCS.2023.20220579 |
|
| [28] | SONG Dong, WANG Bukang, PANG Jifang, et al. Feasibility evaluation of highwall mining in open-pit coal mine based on method of integrated analytic hierarchy process-fuzzy comprehensive evaluation-variable weight theory[J]. Electronics, 2023, 12(21): 4460. |
| [29] | GUO Lei, XU Jihui, HE Weihui. Health assessment of mission-oriented TT&C antenna[J]. Journal of Physics: Conference Series, 2023, 2489(1): 012019. |
| [30] | 杨文娟, 王文明, 王全玉, 等. 基于感知哈希和视觉词袋模型的图像检索方法[J]. 图学学报, 2019, 40(3): 519-524. |
| YANG Wenjuan, WANG Wenming, WANG Quanyu, et al. Image retrieval method based on perceptual hash algorithm and bag of visual words[J]. Journal of Graphics, 2019, 40(3): 519-524. |
| [1] | 祝程程, 李真, 郭金运, 周茂盛, 李婉秋. 基于限定区域的纬度做差法解算宽刈幅测高数据交叉点位置[J]. 测绘学报, 2026, 55(4): 673-683. |
| [2] | 杨小磊, 肖云, 杨丽清, 洪晓东, 郭恩泽, 王翰. 时变重力场反演的改进基线法[J]. 测绘学报, 2026, 55(4): 708-720. |
| [3] | 李洋, 黄海军, 刘素兰, 吴晓辉, 刘琦, 庞琪沛, 吴云龙. 鄱阳湖流域未来百年陆地水储量异常预测及干旱风险评估:基于CMIP6驱动的Transformer-GRU模型[J]. 测绘学报, 2026, 55(4): 721-738. |
| [4] | 杨先圣. 高可用可见光智能定位技术研究[J]. 测绘学报, 2026, 55(4): 753-753. |
| [5] | 耿继军. 基于智能手机多传感器融合的行人室内外定位研究[J]. 测绘学报, 2026, 55(4): 754-754. |
| [6] | 马宏阳. 对流层模型增强的PPP-AR理论方法及在机载导航中的应用研究[J]. 测绘学报, 2026, 55(4): 756-756. |
| [7] | 刘航. 联合地基GNSS和星载GNSS-R的低纬电离层闪烁监测及预报方法研究[J]. 测绘学报, 2026, 55(4): 758-758. |
| [8] | 刘海锋. 基于GNSS无线电掩星的电离层突发E层时空分布研究[J]. 测绘学报, 2026, 55(4): 759-759. |
| [9] | 王家耀, 陈琳, 程士源, 王利军, 熊思奇. 人工智能赋能地图科学数智化[J]. 测绘学报, 2026, 55(3): 381-389. |
| [10] | 吴汤婷, 罗馨语, 卢立果, 刘站科, 超能芳. 基于GNSS和GRACE/GRACE-FO的陕甘宁地区水资源与水文干旱特征时空变化评价[J]. 测绘学报, 2026, 55(3): 439-450. |
| [11] | 马中民, 张双成, 周昕, 刘奇, 刘宁, 王恒利. 顾及地表反射率不确定性的风云三号GNSS-R洪涝监测方法:以8·2广东极端暴雨灾害为例[J]. 测绘学报, 2026, 55(3): 451-464. |
| [12] | 周瑞, 朱锋, 张小红. 基于先验位姿与运动编排的相机惯导外参标定方法[J]. 测绘学报, 2026, 55(3): 465-476. |
| [13] | 刘婧璇, 刘学习, 张克非, 杨超, 吴素芹, 朱守庆, 郭福东. 基于LSTM模型与加权最小二乘组合的日长变化预测方法[J]. 测绘学报, 2026, 55(3): 477-489. |
| [14] | 侯文韬, 肖云, 曹杰, 王宇康, 曹春婷, 王翰. 基于特征加权CatBoost模型的重力卫星反演地下水储量变化降尺度方法[J]. 测绘学报, 2026, 55(3): 490-501. |
| [15] | 徐磊. GNSS区域电离层精细化建模理论与方法研究[J]. 测绘学报, 2026, 55(3): 565-565. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||