

Acta Geodaetica et Cartographica Sinica ›› 2026, Vol. 55 ›› Issue (2): 344-358.doi: 10.11947/j.AGCS.2026.20250310
• Photogrammetry and Remote Sensing • Previous Articles Next Articles
Haopeng HU( ), Hangbin WU(), Shihao ZHAN, Zaihao WEN, Chun LIU
), Hangbin WU(), Shihao ZHAN, Zaihao WEN, Chun LIU
Received:2025-07-31
Revised:2026-01-05
Online:2026-03-13
Published:2026-03-13
Contact:
Hangbin WU
E-mail:haopenghu@tongji.edu.cn;hb@tongji.edu.cn
About author:HU Haopeng (2001—), male, PhD candidate, majors in road elements change detection and high-definition map updates. E-mail: haopenghu@tongji.edu.cn
Supported by:CLC Number:
Haopeng HU, Hangbin WU, Shihao ZHAN, Zaihao WEN, Chun LIU. Road pole-like object change detection supported by visual point cloud quality optimization[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(2): 344-358.

Fig. 1
The overall framework of the visual crowdsource change detection algorithm for road elements"
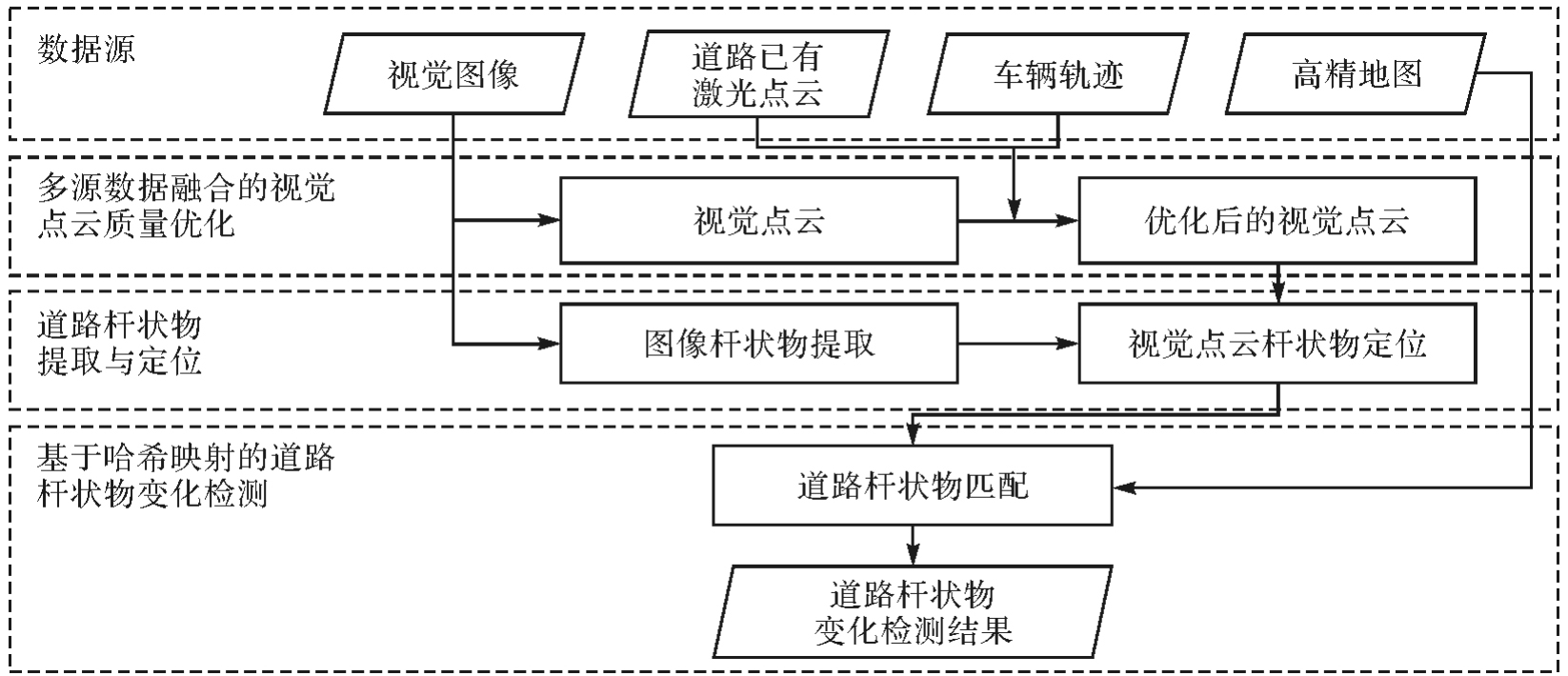

Fig. 2
Overall framework for optimizing visual point clouds"
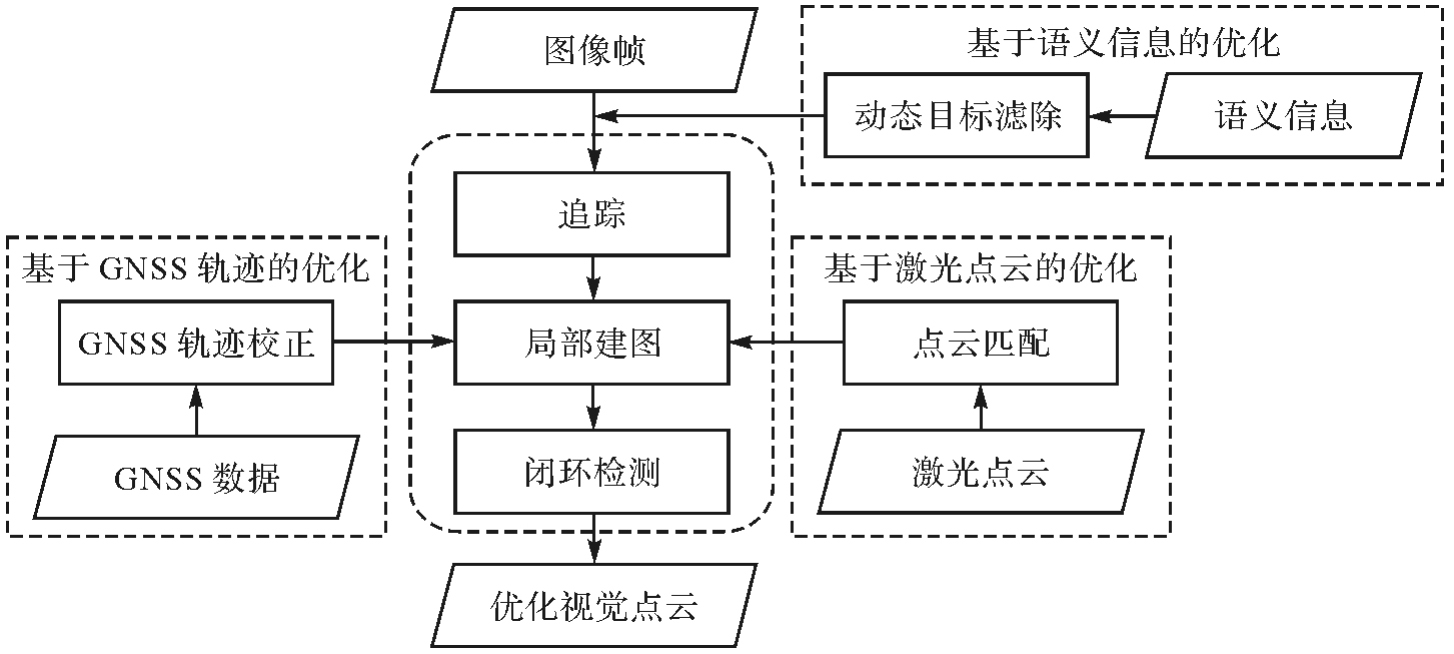

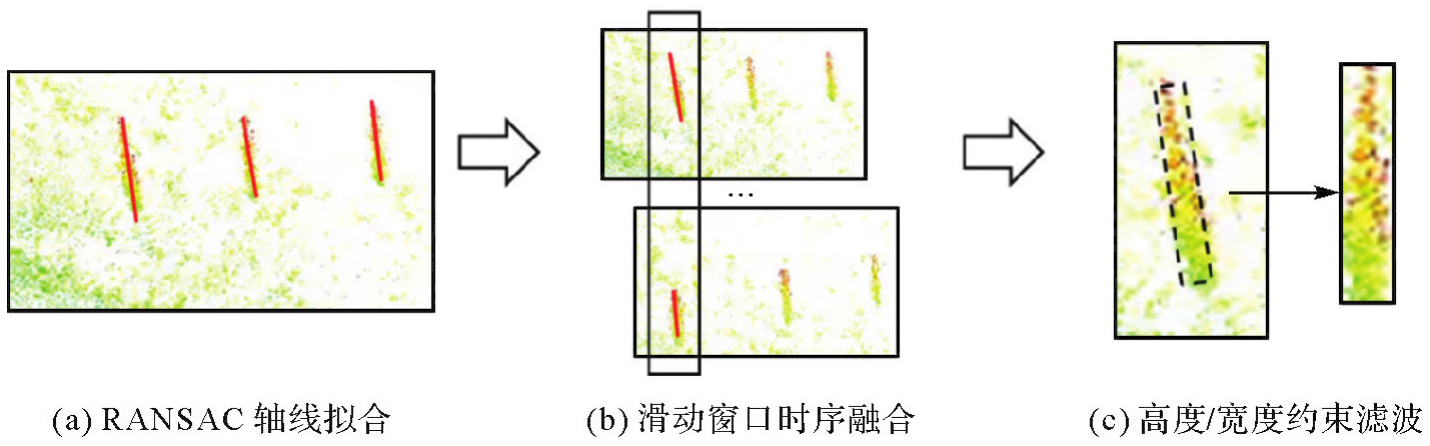
Fig. 3
Optimal positioning process of road pole-like object point cloud"
Tab. 1
Localization results of road pole-like objects"
| 变化情况 | 前期有杆状物 | 后期有杆状物 | 前后有语义变化 | 检测方法 |
|---|---|---|---|---|
| 新增 | 否 | 是 | 否 | 在杆状物匹配阶段,若当前期目标的候选匹配集合为空,则标记为新增候选。通过核密度估计过滤因噪声或临时障碍物导致的误检 |
| 移除 | 是 | 否 | 否 | 移除检测需验证点云缺失区域的持续性,并确认底部结构是否匹配历史数据,避免误判 |
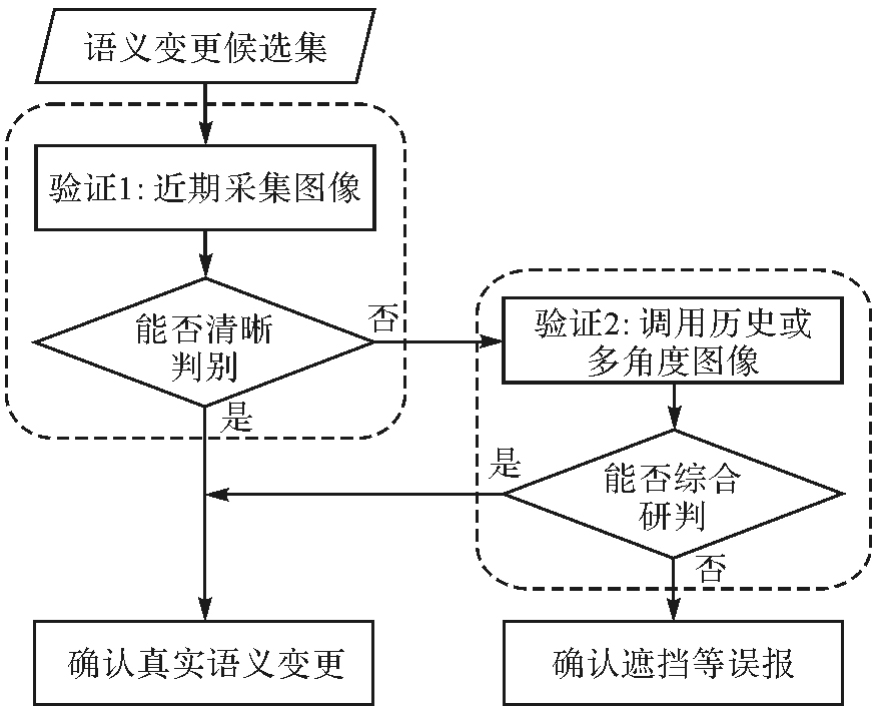
| 语义变化 | 是 | 是 | 否 | 对两期同一杆状物的语义标签进行一致性校验,确定变更候选集,随后通过试验设备采集的图像数据多重验证,排除遮挡或误检 |
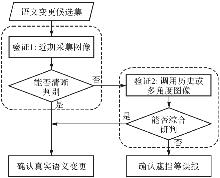
Fig. 4
Semantic changes of pole-like object multiple verification of image data"
Tab. 2
Experimental data information"
| 期 | 采集时间 | GNSS | Mono | 采集周期/s | 采集长度/m | 图像数 |
|---|---|---|---|---|---|---|
| D1 | 2024-10 | √ | √ | 240 | 3 243.21 | 2401 |
| D2 | 2025-04 | √ | √ | 247 | 3 263.67 | 2409 |
Tab. 3
Comparison of accuracy and running time between the two methods"
| 期 | ORB-SLAM2 | 本文方法 | 优化提升 | |||||
|---|---|---|---|---|---|---|---|---|
| MAE/m | RMSE/m | 时间/s | MAE/m | RMSE/m | 时间/s | MAE/(%) | RMSE/(%) | |
| D1 | 5.798 | 5.440 | 694 | 1.625 | 1.762 | 952 | 71.97 | 67.60 |
| D2 | 5.941 | 6.047 | 682 | 2.091 | 2.196 | 972 | 64.80 | 63.69 |
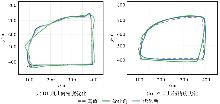
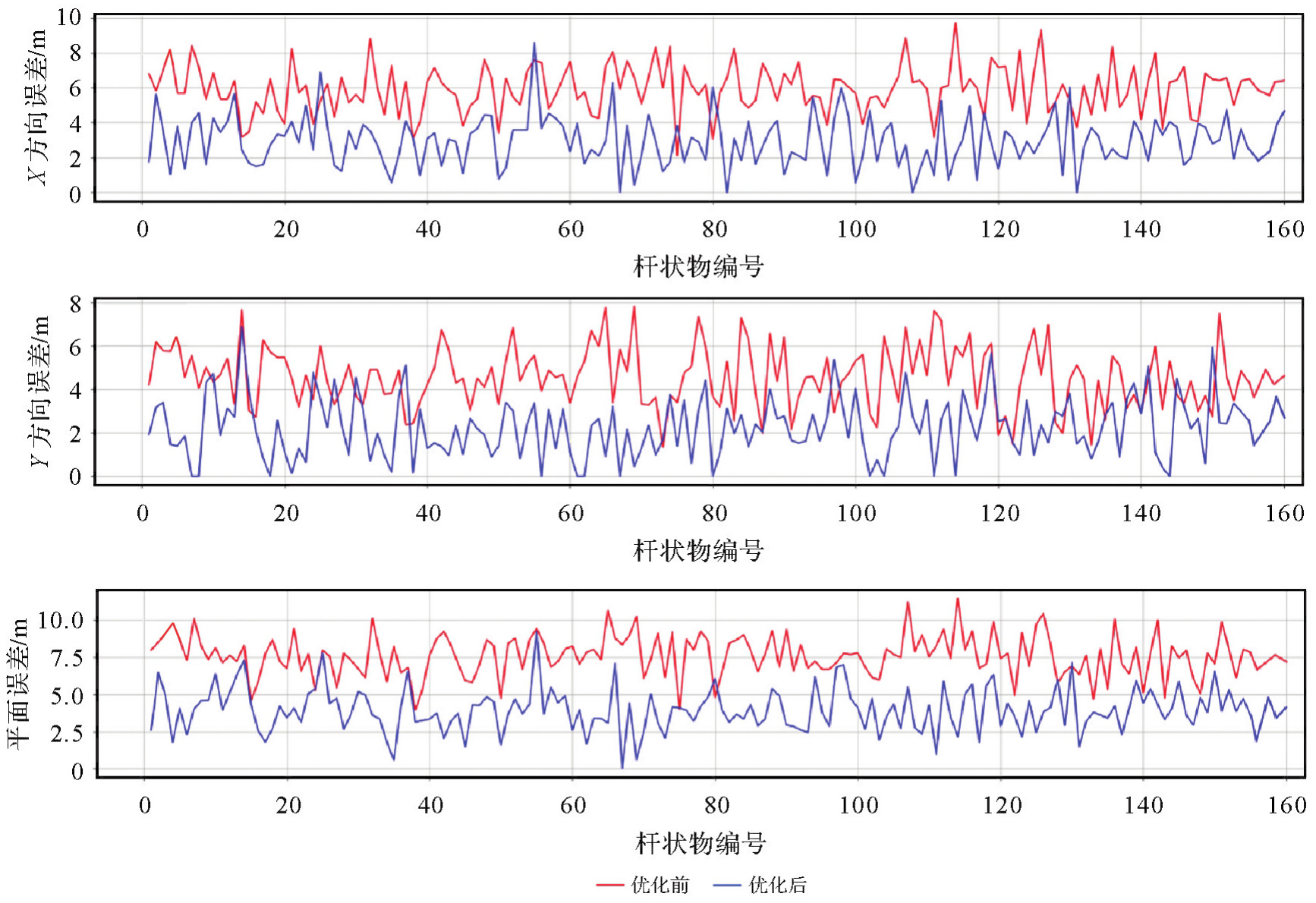
Fig. 5
Comparison of visual point cloud geometric accuracy before and after optimization"
Tab. 4
Comparison of point cloud quantity between the two methods"
| 期 | ORB-SLAM2点云数量 | 本文方法点云数量 | 优化提升/(%) |
|---|---|---|---|
| D1 | 156 486 | 250 213 | 59.89 |
| D2 | 140 852 | 219 792 | 56.04 |

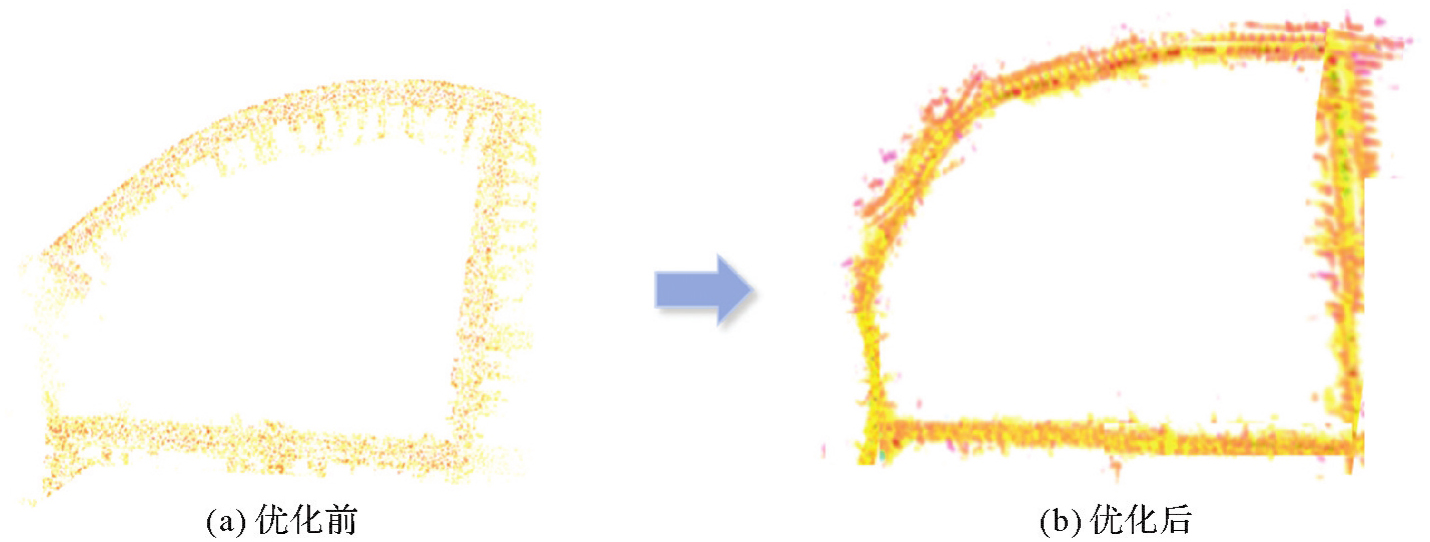
Fig. 6
Comparison of visual point cloud quality before and after optimization in D1 data"
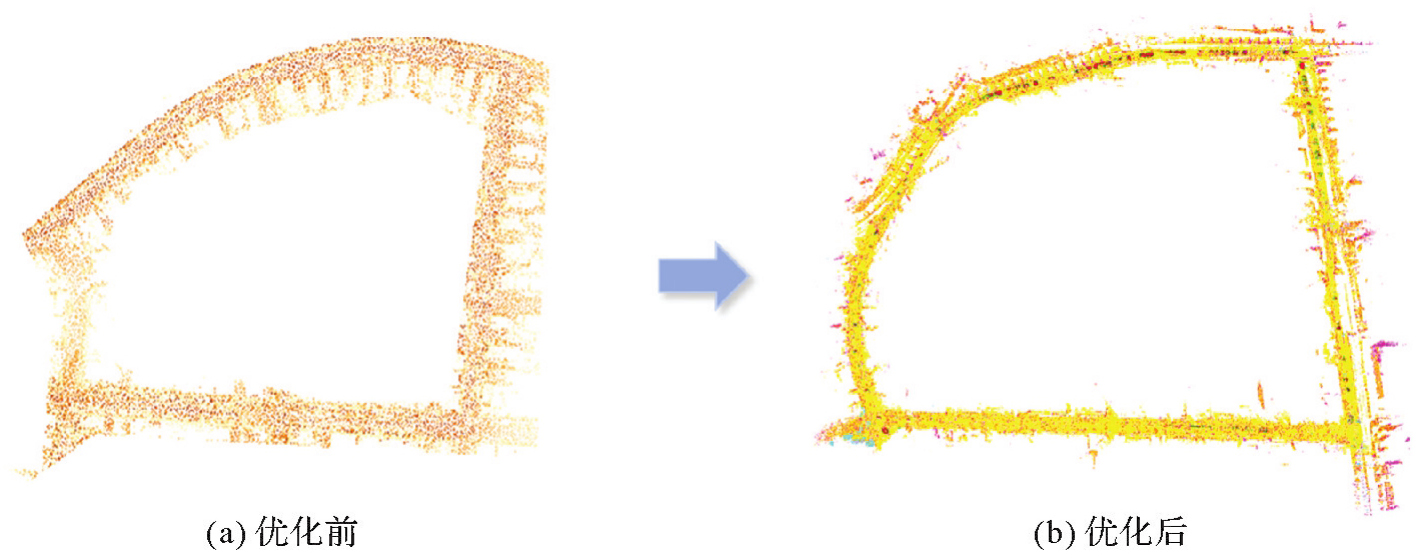
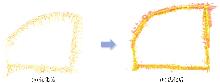
Fig. 7
Comparison of visual point cloud quality before and after optimization in D2 data"
Tab. 5
Comparison of ablation experiments optimized only for semantic information"
| 期 | DynaSLAM | 本文方法(仅语义优化) | ||||
|---|---|---|---|---|---|---|
| MAE/m | RMSE/m | 时间/s | MAE/m | RMSE/m | 时间/s | |
| D1 | 3.763 | 3.424 | 1029 | 2.082 | 2.201 | 798 |
| D2 | 3.913 | 3.664 | 1033 | 2.461 | 2.515 | 811 |
Tab. 6
Comparison of ablation experiments optimized only for laser point cloud"
| 期 | MCL | 本文方法(仅激光点云优化) | ||||
|---|---|---|---|---|---|---|
| MAE/m | RMSE/m | 时间/s | MAE/m | RMSE/m | 时间/s | |
| D1 | 2.671 | 2.816 | 895 | 1.902 | 2.046 | 861 |
| D2 | 3.120 | 3.351 | 904 | 2.231 | 2.339 | 873 |
Tab. 7
Comparison of ablation experiments optimized only for GNSS"
| 期 | MVSLAM | 本文方法(仅GNSS优化) | ||||
|---|---|---|---|---|---|---|
| MAE/m | RMSE/m | 时间/s | MAE/m | RMSE/m | 时间/s | |
| D1 | 2.912 | 3.061 | 813 | 2.013 | 2.101 | 795 |
| D2 | 3.645 | 3.816 | 821 | 2.307 | 2.384 | 801 |
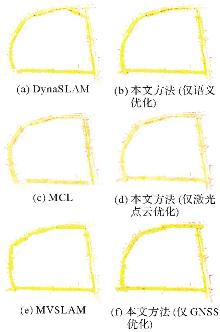
Fig. 8
Comparison of D1 visual point cloud data quality optimization ablation experiments"
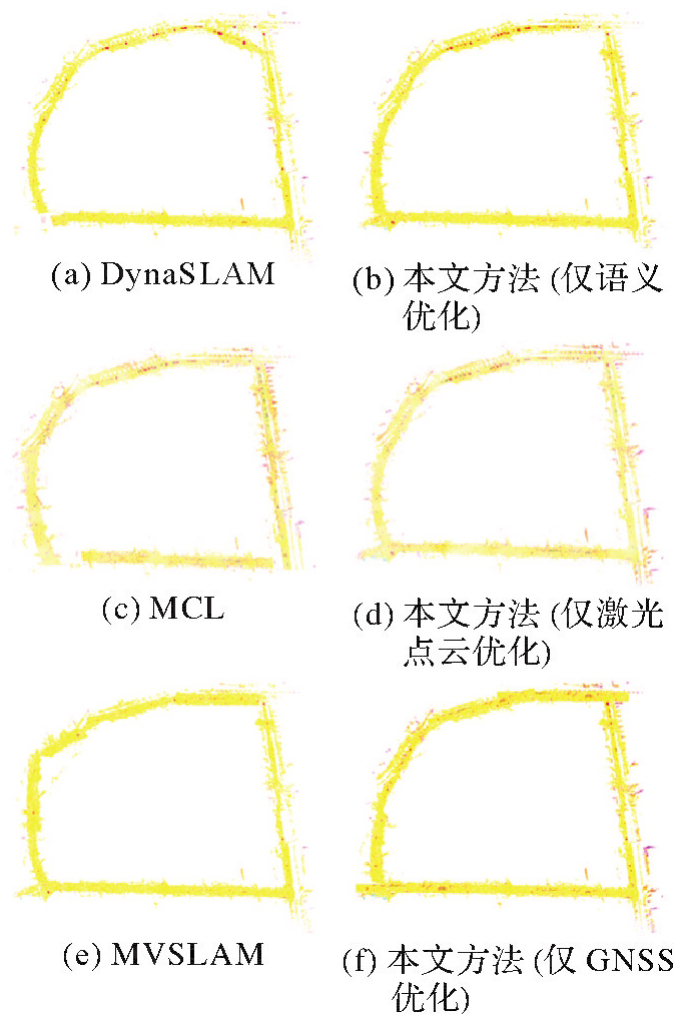
Fig. 9
Comparison of D2visual point cloud data quality optimization ablation experiments"
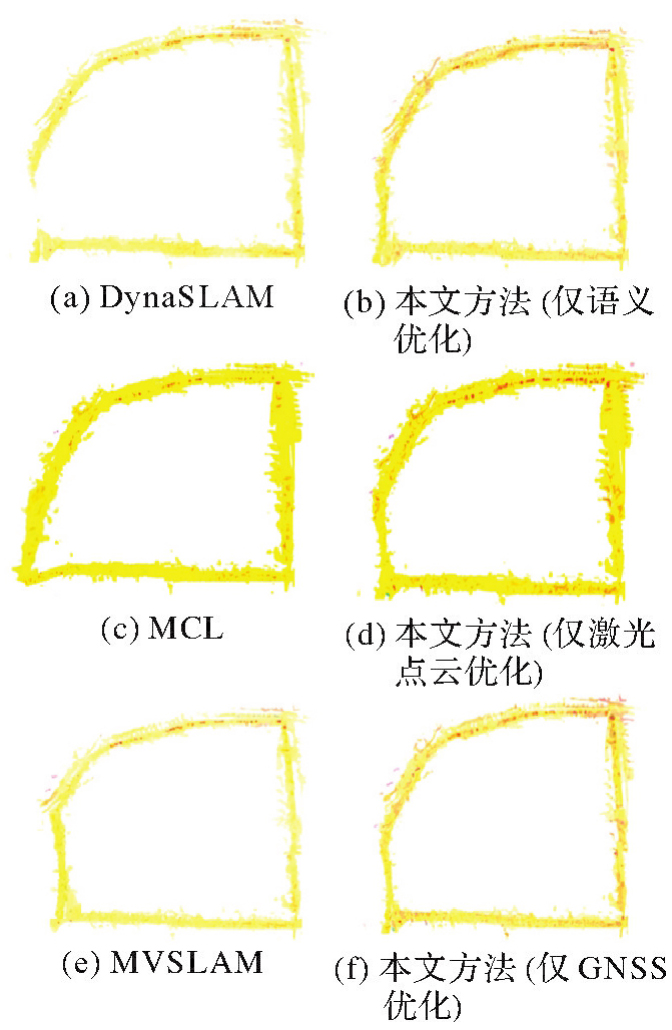
Fig. 10
Pole-like object positioning results at D1 data"
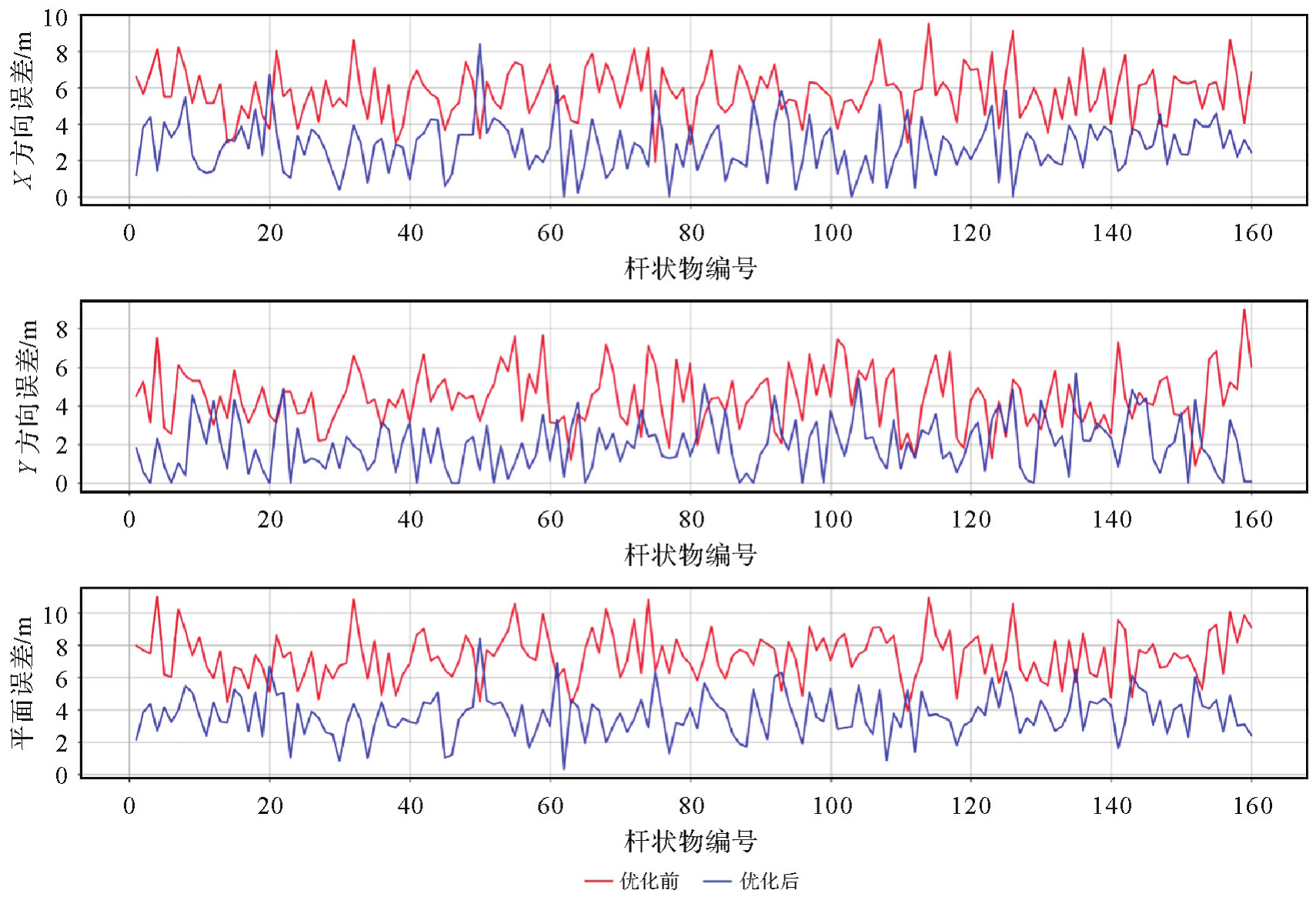
Fig. 11
Pole-like object positioning results at D2 data"
Tab. 8
Mean localization errors of road pole-like objects"
| 统计指标 | D1 | D2 | ||||
|---|---|---|---|---|---|---|
| 优化前/m | 优化后/m | 优化提升/(%) | 优化前/m | 优化后/m | 优化提升/(%) | |
| X方向 | 5.834 | 2.628 | 54.95 | 6.044 | 2.821 | 53.32 |
| Y方向 | 4.357 | 2.015 | 53.75 | 4.533 | 2.257 | 50.22 |
| 平面 | 7.281 | 3.312 | 54.37 | 7.555 | 3.613 | 52.18 |
Tab. 9
Matching results of road pole-like objects"
| 匹配指标 | 匹配总数 | 正确匹配数 | 匹配准确率/(%) | 匹配效率(单目标)/ms |
|---|---|---|---|---|
| 结果 | 161 | 153 | 94.8% | 12 |
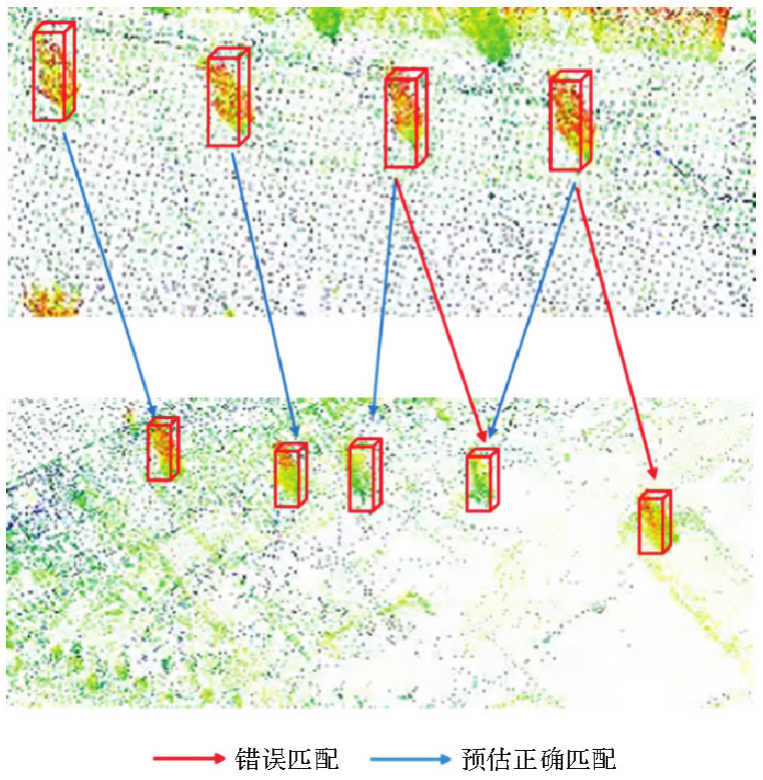
Fig. 12
Pole-like objects incorrect matching case"
Tab. 10
Detection results of natural changes in road pole-like objects"
| 变化检测类型 | 总数 | 精确率/(%) | 召回率/(%) |
|---|---|---|---|
| 新增 | 2 | 100 | 100 |
| 移除 | 1 | 100 | 100 |
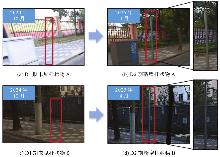
Fig. 13
Verification of the added road pole-like objects"
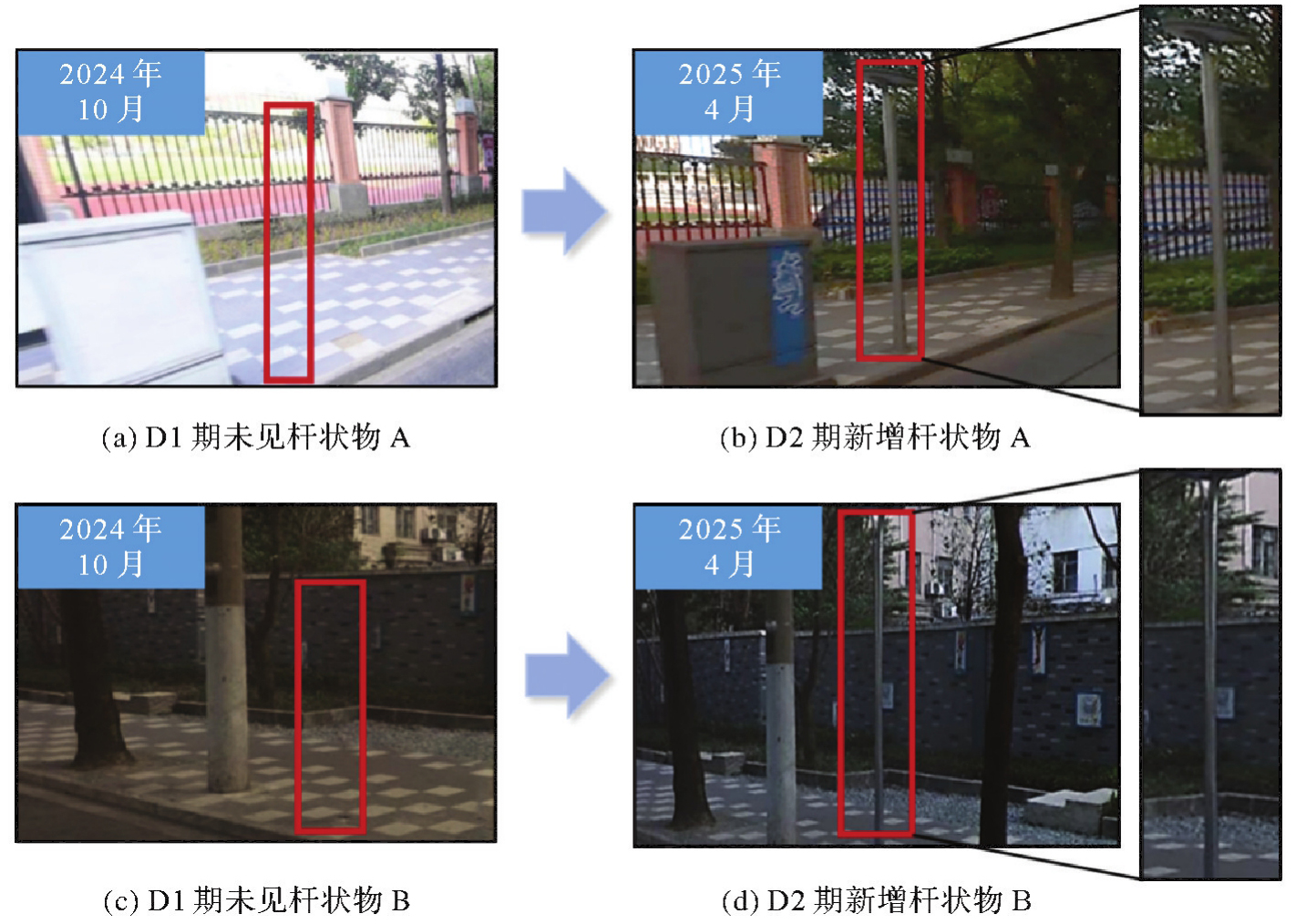

Fig. 14
Verification of the removed road pole-like objects"
Tab. 11
Detection results of artificial changes in road pole-like objects"
| 变化检测类型 | 总数 | 精确率/(%) | 召回率/(%) |
|---|---|---|---|
| 新增 | 10 | 100 | 100 |

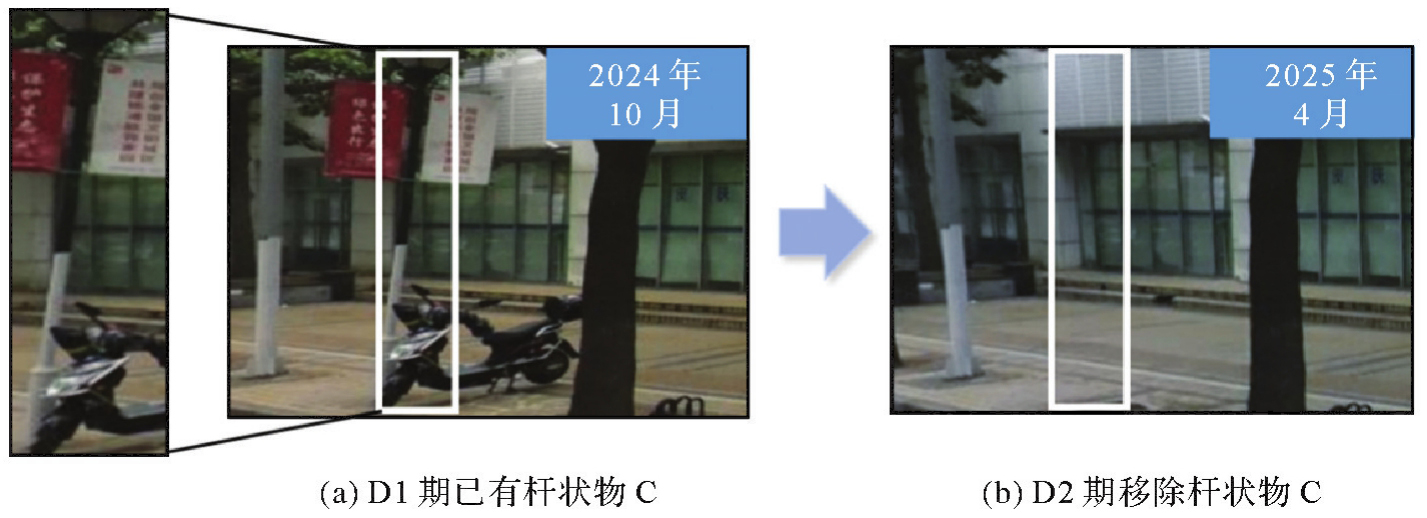
Fig. 15
Verification of the artificially added road pole-like objects"
Tab. 12
Experimental validations of topographic map data"
| 杆状物类别 | 真值数量 | 本文方法计算数量 |
|---|---|---|
| 路灯 | 137 | 138 |
| 标识牌 | 23 | 23 |
| 限高 | 1 | 1 |
| 总计 | 161 | 162 |
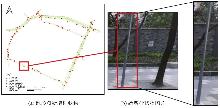
Fig. 16
New pole-like objects on the topographic map"
| [1] | 张敏, 王雁河, 孙周, 等. 交能融合应用场景与技术体系研究[J]. 综合智慧能源, 2025, 47(2): 13-28. |
| ZHANG Min, WANG Yanhe, SUN Zhou, et al. Research on application scenarios and technical system for transportation-energy integration[J]. Integrated Intelligent Energy, 2025, 47(2): 13-28. | |
| [2] | 杨蒙蒙, 江昆, 温拓朴, 等. 自动驾驶高精度地图众源更新技术现状与挑战[J]. 中国公路学报, 2023, 36(5): 244-259. |
| YANG Mengmeng, JIANG Kun, WEN Tuopu, et al. Review on status and challenges of crowdsourced updating of highly automated driving maps[J]. China Journal of Highway and Transport, 2023, 36(5): 244-259. | |
| [3] | XIAO Guiming, LEE Jaeyoung, JIANG Qianshan, et al. Safety improvements by intelligent connected vehicle technologies: a meta-analysis considering market penetration rates[J]. Accident Analysis and Prevention, 2021, 159: 106234. |
| [4] | LI Qingquan. Dynamic and precise engineering surveying[M]. Berlin: Springer, 2023. |
| [5] | FENG Jie, CHEN Hongbin, DENG Xianjun, et al. Confident information coverage hole prediction and repairing for healthcare big data collection in large-scale hybrid wireless sensor networks[J]. IEEE Internet of Things Journal, 2021, 8(23): 16801-16813. |
| [6] |
范红超, 孔格菲, 杨岸然. 众源地理信息研究现状与展望[J]. 测绘学报, 2022, 51(7): 1653-1668. DOI: .
doi: 10.11947/j.AGCS.2022.20220192 |
|
FAN Hongchao, KONG Gefei, YANG Anran. Current status and prospects of research for volunteered geographic information[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(7): 1653-1668. DOI: .
doi: 10.11947/j.AGCS.2022.20220192 |
|
| [7] | MORENO C, GONZÁLEZ A, OLAZAGOITIA J L, et al. The acquisition rate and soundness of a low-cost data acquisition system (LC-DAQ) for high frequency applications[J]. Sensors, 2020, 20(2): 524. |
| [8] | ADADI A. A survey on data-efficient algorithms in big data era[J]. Journal of Big Data, 2021, 8(1): 24. |
| [9] | 冉蓉, 徐兴华, 邱少华, 等. 基于深度卷积神经网络的裂纹检测方法综述[J]. 计算机工程与应用, 2021, 57(9): 23-35. |
| RAN Rong, XU Xinghua, QIU Shaohua, et al. Review of crack detection methods based on deep convolutional neural networks[J]. Computer Engineering and Applications, 2021, 57(9): 23-35. | |
| [10] | 邹云昊, 李和松, 聂婧, 等. 基于RAW数据的图像处理及应用[J]. 信号处理, 2025, 41(2): 224-240. |
| ZOU Yunhao, LI Hesong, NIE Jing, et al. Image processing and applications based on RAW sensor data[J]. Journal of Signal Processing, 2025, 41(2): 224-240. | |
| [11] | CHENG Jun, ZHANG Liyan, CHEN Qihong, et al. A review of visual SLAM methods for autonomous driving vehicles[J]. Engineering Applications of Artificial Intelligence, 2022, 114: 104992. |
| [12] | LIU Hong, PAN Shuguo, GAO Wang, et al. LiDAR-inertial real-time state estimator with rod-shaped and planar feature[J]. Remote Sensing, 2022, 14(16): 4031. |
| [13] | YU Xinyi, HE Weiqi, QIAN Xuecheng, et al. Real-time rail recognition based on 3D point clouds[J]. Measurement Science and Technology, 2022, 33(10): 105207. |
| [14] | 蔡怀宇, 杨朝乾, 崔子扬, 等. 图像引导和点云空间约束的公路洒落物检测定位方法[J]. 光电工程, 2024, 51(3): 230317. |
| CAI Huaiyu, YANG Zhaoqian, CUI Ziyang, et al. Image-guided and point cloud space-constrained method for detection and localization of abandoned objects on the road[J]. Opto-Electronic Engineering, 2024, 51(3): 230317. | |
| [15] | SAHILI A R, HASSAN S, SAKHRIEH S M, et al. A survey of visual SLAM methods[J]. IEEE Access, 2023, 11: 139643-139677. |
| [16] | CHEN Xinyu, YU Yantao. An unsupervised low-light image enhancement method for improving V-SLAM localization in uneven low-light construction sites[J]. Automation in Construction, 2024, 162: 105404. |
| [17] | PENG Hongrui, ZHAO Ziyu, WANG Liguan. A review of dynamic object filtering in SLAM based on 3D LiDAR[J]. Sensors, 2024, 24(2): 645. |
| [18] | THEODOROU C, VELISAVLJEVIC V, DYO V. Visual SLAM for dynamic environments based on object detection and optical flow for dynamic object removal[J]. Sensors, 2022, 22(19): 7553. |
| [19] | WANG Ke, ZHAO Guoliang, LU Jianbo. A deep analysis of visual SLAM methods for highly automated and autonomous vehicles in complex urban environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(9): 10524-10541. |
| [20] | LU Yifan, LI Quanhao, LIU Baoan, et al. Robust collaborative 3D object detection in presence of pose errors[C]//Proceedings of 2023 IEEE International Conference on Robotics and Automation (ICRA). London: IEEE, 2023: 4812-4818. |
| [21] | HOSAIN M T, ZAMAN A, ABIR M R, et al. Synchronizing object detection: applications, advancements and existing challenges[J]. IEEE Access, 2024, 12: 54129-54167. |
| [22] | YE Longjie, XIAO Wen, WENG Qihao. Supervoxel-based instance segmentation of pole-like facilities from mobile laser scanning data using pyramid cascaded fisher vector modeling[J]. IEEE Transactions on Geoscience and Remote Sensing, 2025, 63: 5701519. |
| [23] | LI Gang, YU Jian, HUANG Huilan, et al. Dynamic object removal and dense mapping for accurate visual SLAM in outdoor environments[J]. Measurement, 2025, 256: 118172. |
| [24] | LIU Wei, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector[C]//Proceedings of 2016 Computer Vision-ECCV. Cham: Springer, 2016: 21-37. |
| [25] | LIM H, HWANG S, MYUNG H. ERASOR: egocentric ratio of pseudo occupancy-based dynamic object removal for static 3D point cloud map building[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 2272-2279. |
| [26] | BESL P J, MCKAY N D. Method for registration of 3D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14(2): 239-256. |
| [27] | RODRIGUEZ O. Des lois geometriques qui regissent les desplacements d'un systeme solide dans l'espace et de la variation des coordonnees provenant de deplacements consideres independamment des causes qui peuvent les produire[J]. Vournalde Mathématiques Pureset Appliquées, 1840, 5: 380-440. |
| [28] | DEMMEL J, KAHAN W. Accurate singular values of bidiagonal matrices[J]. SIAM Journal on Scientific and Statistical Computing, 1990, 11(5): 873-912. |
| [29] | PANDE B, PADAMWAR K, BHATTACHARYA S, et al. A review of image annotation tools for object detection[C]//Proceedings of 2022 International Conference on Applied Artificial Intelligence and Computing (ICAAIC). Salem: IEEE, 2022: 976-982. |
| [30] | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas: IEEE, 2016: 779-788. |
| [31] | YAO A C. Uniform hashing is optimal[J]. Journal of the ACM, 1985, 32(3): 687-693. |
| [32] | WANG Yanjun, LI Shaochun, WANG Mengjie, et al. A simple deep learning network for classification of 3D mobile LiDAR point clouds[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(3): 49-59. |
| [33] | YANG Juntao, KANG Zhizhong, YANG Zhou. A robust model fitting-based method for transmission line extraction from airborne LiDAR point cloud data[J]. Journal of Geodesy and Geoinformation Science, 2021, 4(3): 60-71. |
| [34] | GENG Yuxin, ZHONG Ruofei, HUANG Yuqin, et al. Automatic extraction method of 3D feature guidelines for complex cultural relic surfaces based on point cloud[J]. Journal of Geodesy and Geoinformation Science, 2024, 7(1): 16-41. |
| [35] | YI Hao, LIU Bo, ZHAO Bin, et al. Small object detection algorithm based on improved YOLOv8 for remote sensing[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2024, 17: 1734-1747. |
| [36] | WILLMOTT C J, MATSUURA K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance[J]. Climate Research, 2005, 30(1): 79-82. |
| [37] | BESCOS B, FÁCIL J M, CIVERA J, et al. DynaSLAM: tracking, mapping, and inpainting in dynamic scenes[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4076-4083. |
| [38] | CASELITZ T, STEDER B, RUHNKE M, et al. Monocular camera localization in 3D LiDAR maps[C]//Proceedings of 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Daejeon: IEEE, 2016: 1926-1931. |
| [39] | CHU Tianxing, GUO Ningyan, BACKÉN S, et al. Monocular camera/IMU/GNSS integration for ground vehicle navigation in challenging GNSS environments[J]. Sensors, 2012, 12(3): 3162-3185. |
| [1] | Hongmei WANG, Lihua WANG, Benhua TAN, Xiaoyi JIANG, Lili SONG, Weiwei SUN. SAR high-precision inversion of sea surface current over offshore China [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 588-603. |
| [2] | Lanxin WU, Jiangtao PENG, Weiwei SUN, Bing YANG. An Euler embedding and complementary feature modeling framework for hyperspectral change detection in coastal wetlands [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 618-631. |
| [3] | Daifeng PENG, Xuelian LIU, Mengfei LU, Haiyan GUAN. Heterogeneous remote sensing image flood change detection based on multi-scale cross-modal feature fusion [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(2): 328-343. |
| [4] | Jixian ZHANG, Haiyan GU, Huan NI, Haitao LI, Yi YANG, Shaopeng DING, Songman SUI. Deep learning methods for remote sensing intelligent change detection: evolution and development [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(8): 1347-1370. |
| [5] | Chao WANG, Tianyu CHEN, Tong ZHANG, Tanvir AHMED, Liqiang JI, Tao XIE, Jiajun YANG, Shuai WANG. Multi-sensor optical remote sensing images change detection based on global differential enhancement module and balance penalty loss [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(5): 873-887. |
| [6] | Zhaofeng DU, Guopeng LI, Zhanke LIU, Xiaming SHANG, Shengjun KANG, Xiaoqiang WANG. Comprehensive analysis of multiple monitoring methods in main subsidence areas [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(3): 481-492. |
| [7] | Liangxiong GONG, Xinghua LI, Yuanming CHENG, Xingyou ZHAO, Renping XIE, Honggen WANG. A lightweight remote sensing images change detection network utilizing spatio-temporal difference enhancement and adaptive feature fusion [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 136-153. |
| [8] | Xin YAN, Li SHEN, Junjie PAN, Yanshuai DAI, Jicheng WANG, Xiaoli ZHENG, Zhi-lin LI. Weakly supervised building change detection integrating multi-scale feature fusion and spatial refinement for high resolution remote sensing images [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(8): 1586-1597. |
| [9] | Xiaogang NING, Hanchao ZHANG, Ruiqian ZHANG. Practical framework and methodology for high-performance intelligent invariant detection in remote sensing imagery [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1098-1112. |
| [10] | Haiyan GU, Yi YANG, Haitao LI, Lijian SUN, Shaopeng DING, Shiqi LIU. Dynamic construction of high-resolution remote sensing image sample datasets and intelligent interpretation applications [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1165-1179. |
| [11] | Daifeng PENG, Chenchen ZHAI, Dingwei ZHOU, Yongjun ZHANG, Haiyan GUAN, Yufu ZANG. High-resolution optical images change detection based on global information enhancement by pyramid semantic token [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1195-1211. |
| [12] | Shaopeng DING, Xiushan LU, Rufei LIU, Yi YANG, Haiyan GU, Haitao LI. Building change detection method combining object feature guidance and multiple attention mechanism [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(6): 1224-1235. |
| [13] | Shiyan PANG, Jingjing HAO, Zhiqi ZUO, Jingjing LAN, Xiangyun HU. A high-resolution remote sensing images change detection method via the integration of dense connections and self-attention mechanisms [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(12): 2244-2253. |
| [14] | Jinqi ZHAO, Yuxuan LI, Zirong LIU, Qing AN, Shiyu SONG, Yufen NIU. Flood change detection method using optimized similarity measurement function with temporal-spatial-polarized SAR information [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(12): 2375-2390. |
| [15] | WANG Yankun, FAN Hong, FAN Yong, LI Xiaoming, WANG Weixi, GUO Renzhong. A “near” relation enhanced multi-sourced data fusion indoor positioning method [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(1): 118-125. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||