

Acta Geodaetica et Cartographica Sinica ›› 2024, Vol. 53 ›› Issue (9): 1761-1776.doi: 10.11947/j.AGCS.2024.20230371
• Geodesy and Navigation • Previous Articles Next Articles
Jianhua CHENG( ), Sicheng CHEN, Nan ZANG(), Sixiang CHENG, Guojing ZHAO, Zifan MA
), Sicheng CHEN, Nan ZANG(), Sixiang CHENG, Guojing ZHAO, Zifan MA
Received:2023-09-07
Online:2024-10-16
Published:2024-10-16
Contact:
Nan ZANG
E-mail:ins_cheng@163.com;zang6050@163.com
About author:CHENG Jianhua (1977—), male, PhD, professor, majors in SINS and integration technology. E-mail: ins_cheng@163.com
Supported by:CLC Number:
Jianhua CHENG, Sicheng CHEN, Nan ZANG, Sixiang CHENG, Guojing ZHAO, Zifan MA. PPP/INS tightly integrated enhancement model considering adaptive short-term height variation rate constraint[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(9): 1761-1776.
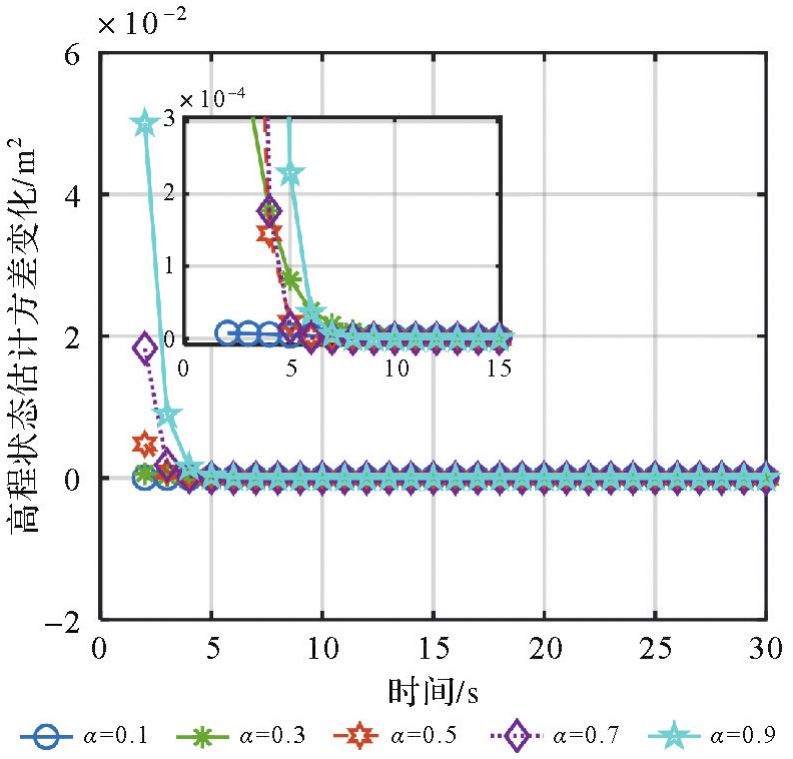
Fig.1
Effects of height state estimation error convariance"
Tab.1
Performance parameters of IMU"
| 参数 | 陀螺仪 | 加速度计 | ||||
|---|---|---|---|---|---|---|
| SPAN CPT | KVH1750 | μIMU | SPAN CPT | KVH1750 | μIMU | |
| 初始零偏 | 20°/h | 2°/h | — | 0.5 m/s2 | 2×10-2 m/s2 | — |
| 零偏不稳定性 | 1°/h | 0.07°/h | — | 7.5×10-2 m/s2 | 7.5×10-2 m/s2 | 7.5×10-2 m/s2 |
| 零偏稳定性 | — | — | 6°/h | — | — | — |
| 比例因子 | 1500×10-6 | ≤50×10-6 | ≤1400×10-6 | 4000×10-6 | ≤100×10-6 | ≤1500×10-6 |
| 随机游走 | 0.067°/sqrt(h) | 0.012°/sqrt(h) | 0.3°/sqrt(h) | 5.5×10-4/sqrt(Hz) | 1.17×10-3/sqrt(Hz) | 2.5×10-4/sqrt(Hz) |
Tab.2
IF PPP/INS tightly coupled estimation method"
| 待估参数 | 估计策略 |
|---|---|
| 对流层延迟τ | 天顶干延迟(Saastamoinen模型改正) 天顶湿延迟(估计为随机游走) |
| GPS接收机钟差dtr,IF,k | 估计为白噪声 |
| 系统间偏差ISBk | 估计为随机游走 |
无电离层组合浮点模糊度 | 估计为常值浮点解 |
加速度计偏差 | 估计为随机游走 |
| 陀螺仪偏差(με) | 估计为随机游走 |
Fig.2
Experiment trajectory of datasets"
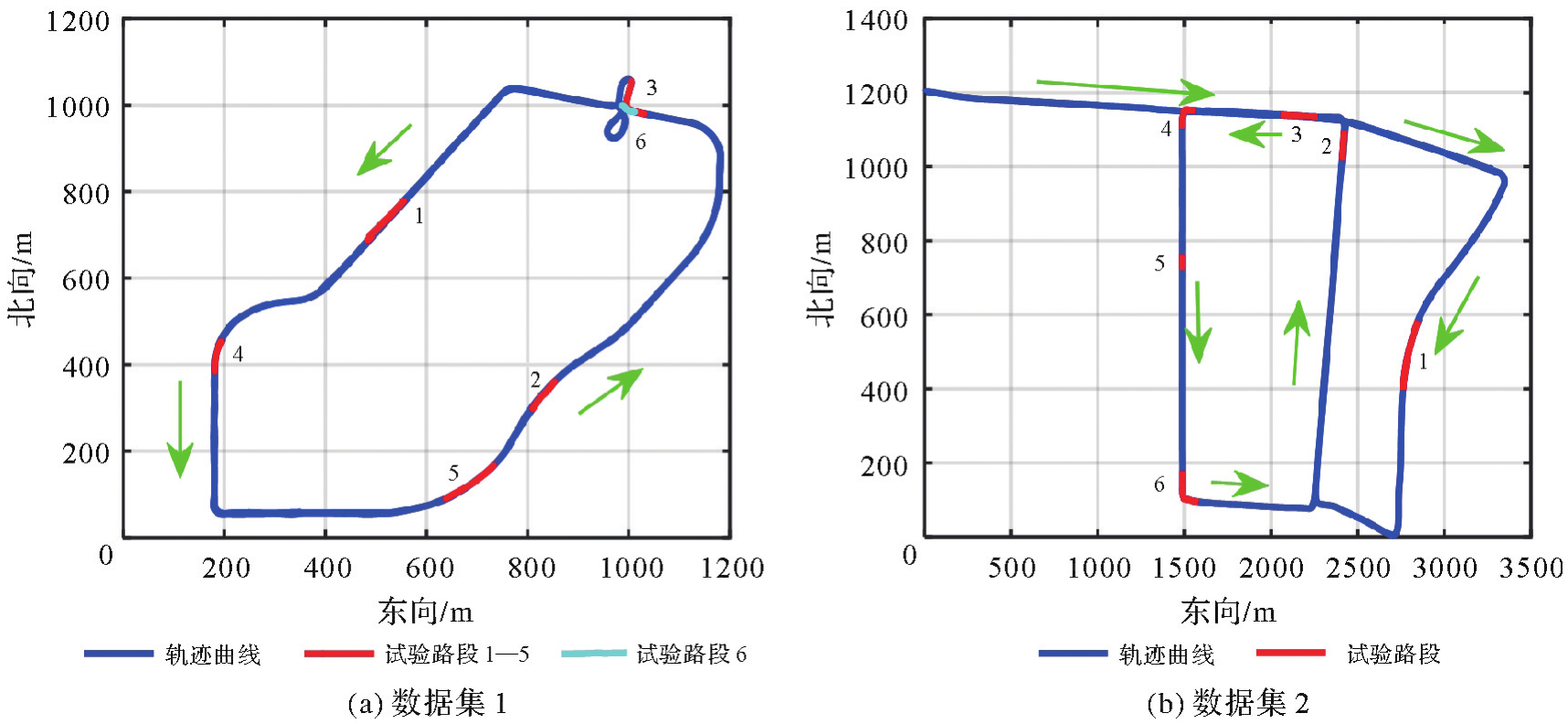
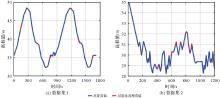
Fig.3
Height variation during vehicle experiment of datasets"
Tab.3
Satellite partial and complete outages settings"
| 路段 | 数据集1 | 数据集2 | ||||
|---|---|---|---|---|---|---|
| 遮挡路段时间/s | 坡度/(%) | 高度截止角/(°) | 遮挡路段时间/s | 坡度/(%) | 高度截止角/(°) | |
| 路段1 | 139~168 | 1.44 | 90 | 408~427 | 0.16 | 78,70 |
| 路段2 | 507~526 | -0.80 | 78 | 498~612 | 0.45 | 78 |
| 路段3 | 747~776 | 1.14 | 78 | 653~672 | 7.69~-4.09 | 70 |
| 路段4 | 1142~1161 | 0.57 | 70 | 723~742 | 9.52~-0.53 | 80 |
| 路段5 | 1352~1381 | -0.64 | 70,90 | 793~807 | 0.55 | 70 |
| 路段6 | 1637~1656 | 1.74 | 70 | 873~892 | 0.53~-2.24 | 78 |
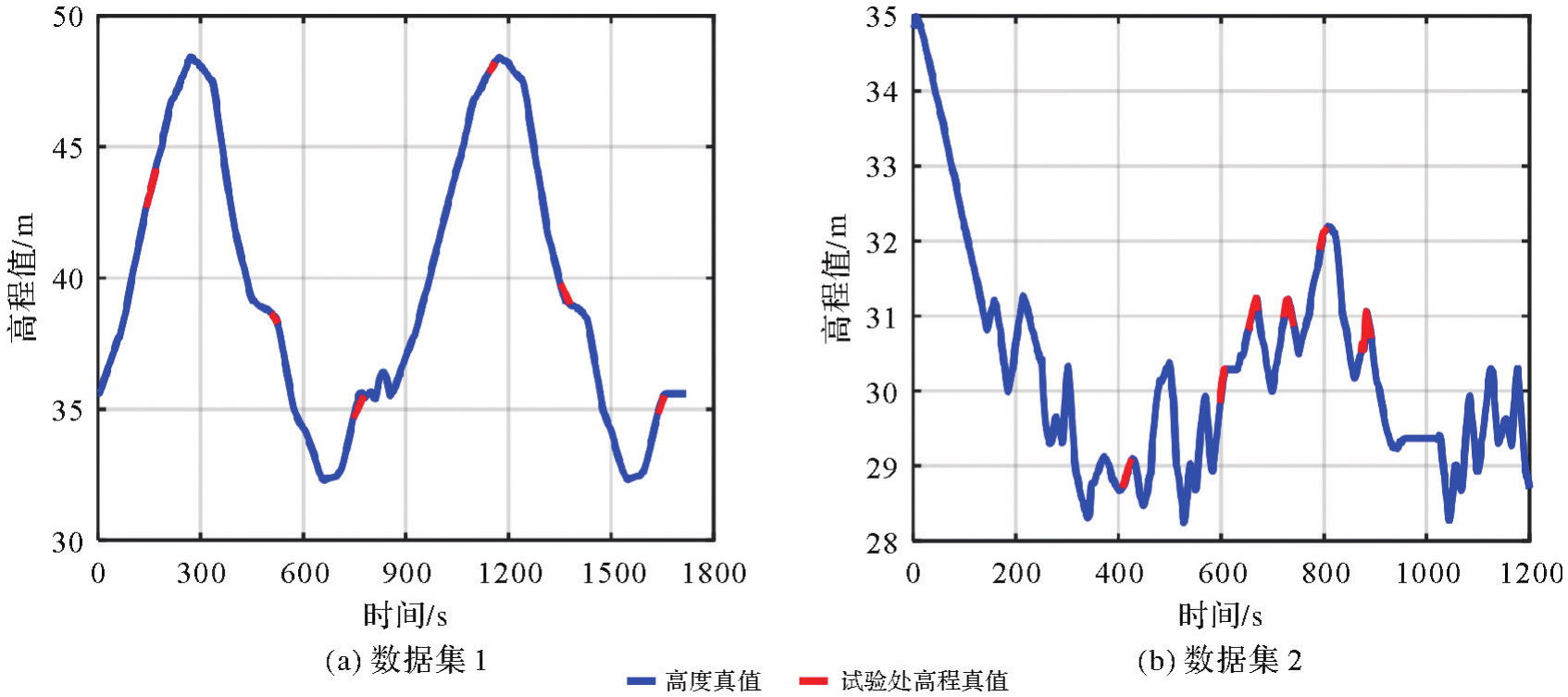
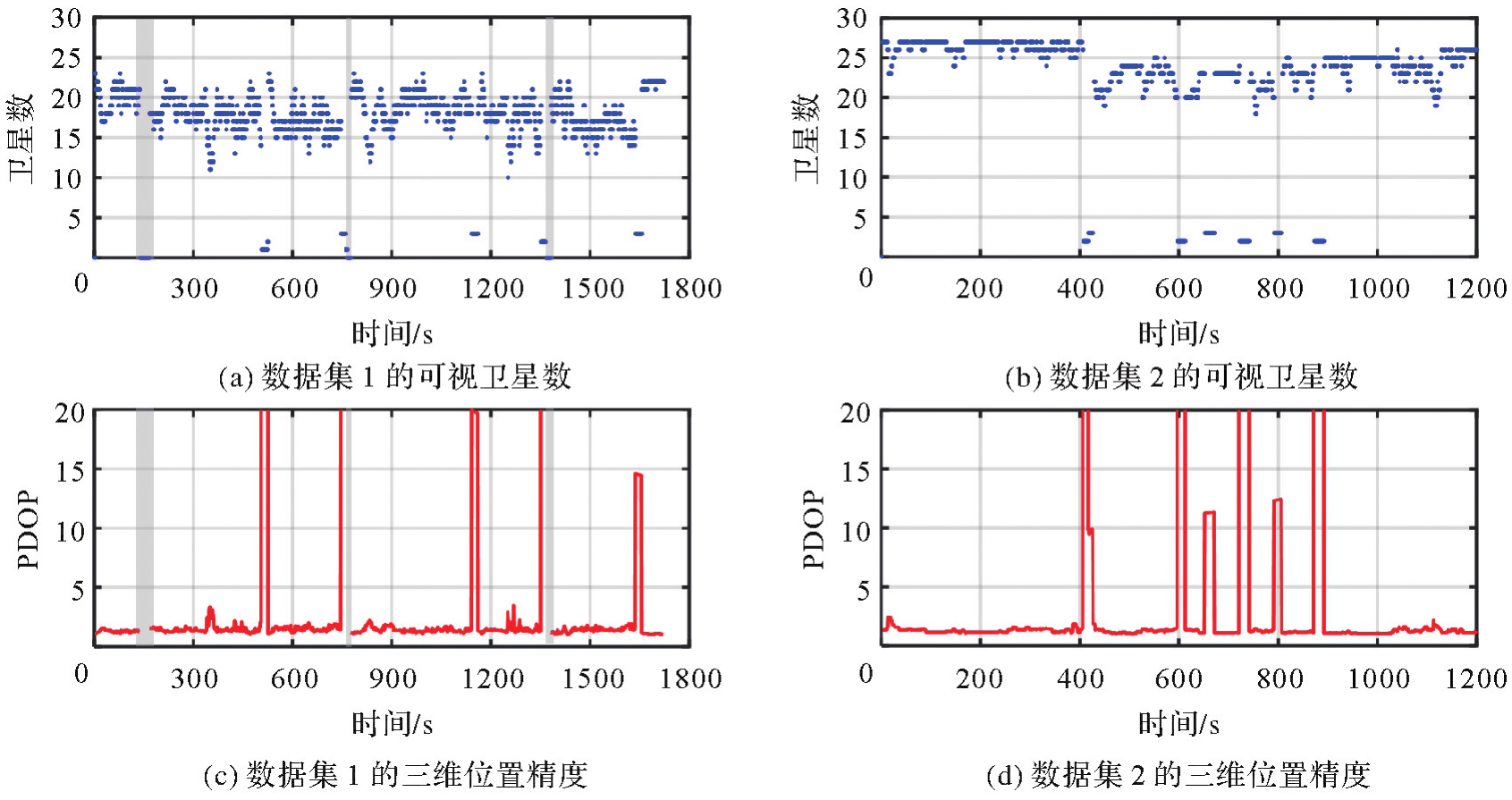
Fig.4
Number of visible satellites and corresponding PDOP of datasets"
Tab.4
Constraint models"
| 模型 | 约束 | 函数模型 | 随机模型 |
|---|---|---|---|
| 1 | 无约束(HCF) | 无 | 无 |
| 2 | 顾及高程变化定权的高程常值约束模型(HRWHC) |  | Rhc,k=(dh)2 |
| 3 | 历元间高程常值约束模型(ICHC) |  | Rhc,k=Pk-1 |
| 4 | 自适应短时高程变化率的高程约束模型(ASTHVRC) | 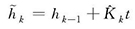 |  |

Fig.5
Measuring errors of four constraint models of datasets"
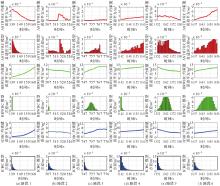
Fig.6
Variance of the height constraint and squared error of the height constraint value of dataset 1"


Fig.7
Variance of the height constraint and squared error of the height constraint value of dataset 2"

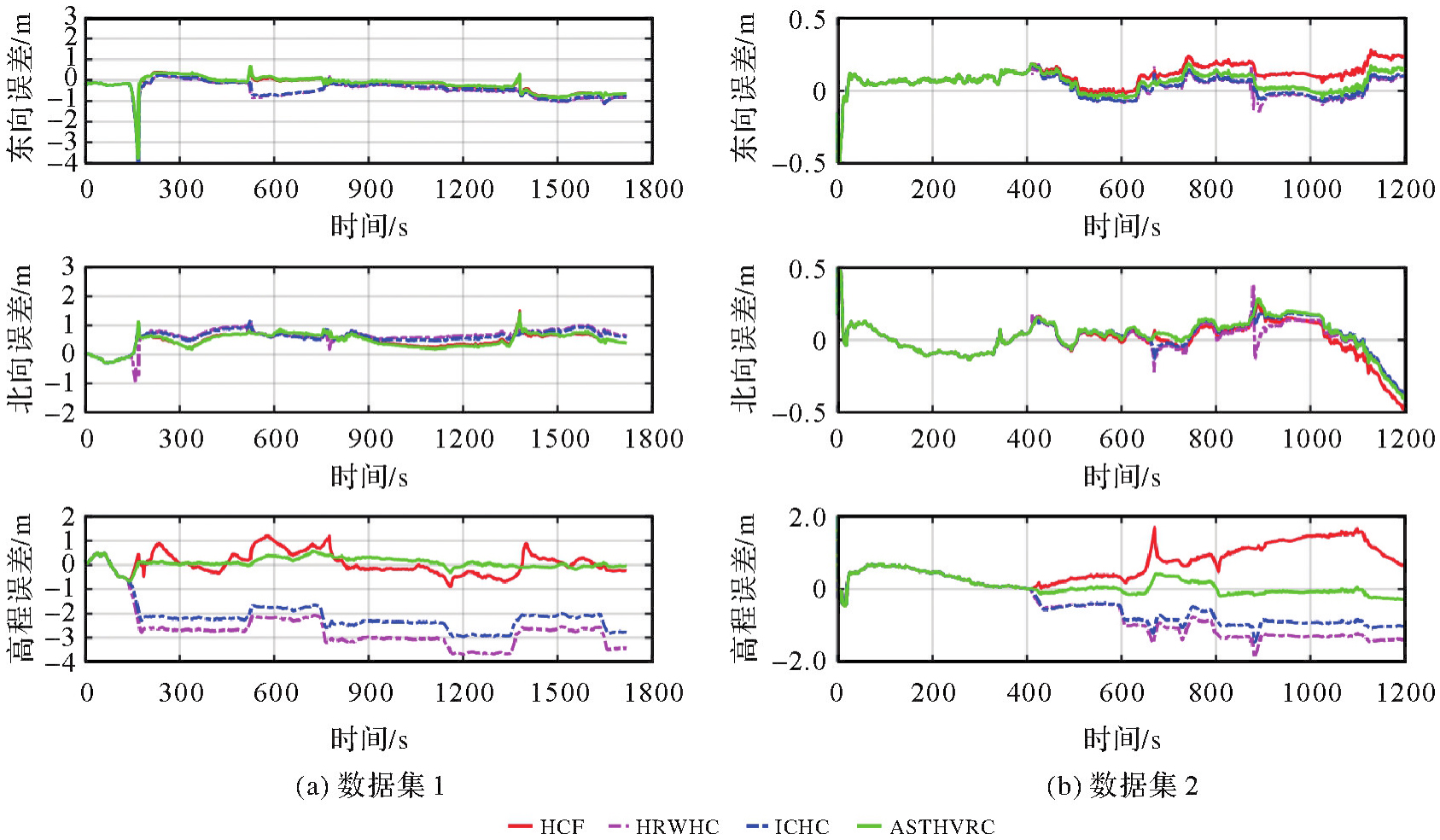
Fig.8
Positioning errors in three directions by different models of datasets"
Tab.5
RMS of positioning errors using four models"
| 模型 | 东方向 | 北方向 | 高程 | |||
|---|---|---|---|---|---|---|
| 数据集1 | 数据集2 | 数据集1 | 数据集2 | 数据集1 | 数据集2 | |
| 1 | 0.45 | 0.13 | 0.56 | 0.14 | 0.46 | 0.84 |
| 2 | 0.62 | 0.09 | 0.71 | 0.12 | 2.87 | 0.94 |
| 3 | 0.59 | 0.09 | 0.67 | 0.12 | 2.29 | 0.73 |
| 4 | 0.45 | 0.09 | 0.55 | 0.13 | 0.21 | 0.30 |

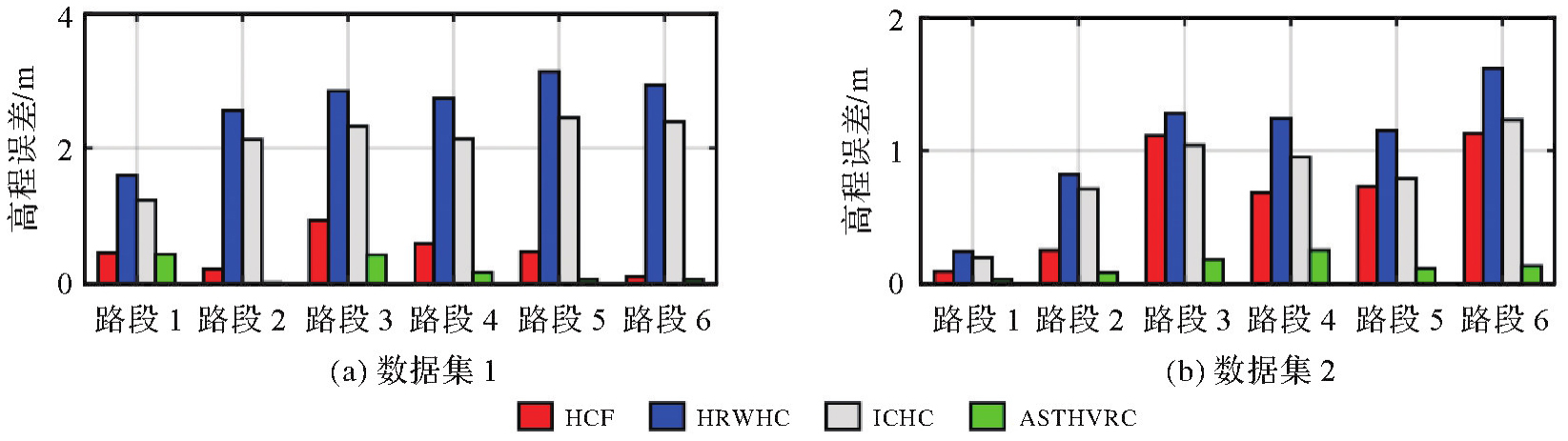
Fig.9
Height positioning errors of dataset 1 and dataset 2"
Tab.6
RMS and absolute maximum height positioning errors of dataset 1"
| 模型 | 路段1 | 路段2 | 路段3 | 路段4 | 路段5 | 路段6 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | |
| 1 | 0.45 | 0.66 | 0.21 | 0.24 | 0.93 | 1.18 | 0.72 | 0.89 | 0.47 | 0.59 | 0.10 | 0.18 |
| 2 | 1.60 | 2.33 | 2.56 | 2.73 | 2.85 | 3.20 | 3.35 | 3.56 | 3.14 | 3.62 | 2.94 | 3.38 |
| 3 | 1.23 | 1.88 | 2.13 | 2.26 | 2.33 | 2.62 | 2.62 | 2.82 | 2.46 | 2.90 | 2.40 | 2.67 |
| 4 | 0.44 | 0.64 | 0.01 | 0.02 | 0.42 | 0.48 | 0.20 | 0.29 | 0.06 | 0.10 | 0.06 | 0.09 |
Tab.7
RMS and absolute maximum height positioning errors of dataset 2"
| 模型 | 路段1 | 路段2 | 路段3 | 路段4 | 路段5 | 路段6 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | |
| 1 | 0.09 | 0.18 | 0.25 | 0.33 | 1.11 | 1.69 | 0.68 | 0.78 | 0.73 | 0.93 | 1.13 | 1.19 |
| 2 | 0.24 | 0.40 | 0.82 | 1.00 | 1.28 | 1.47 | 1.24 | 1.38 | 1.15 | 1.27 | 1.62 | 1.88 |
| 3 | 0.19 | 0.34 | 0.71 | 0.84 | 1.04 | 1.21 | 0.95 | 1.07 | 0.79 | 0.91 | 1.23 | 1.45 |
| 4 | 0.03 | 0.09 | 0.08 | 0.12 | 0.18 | 0.38 | 0.25 | 0.34 | 0.11 | 0.19 | 0.13 | 0.16 |
Tab.8
Positioning errors in three directions by different models under different interruption times of dataset 1 and dataset 2"
| 数据集 | 模型 | 30 s | 60 s | 90 s | 120 s | 150 s | 180 s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 高程 | 三维 | 高程 | 三维 | 高程 | 三维 | 高程 | 三维 | 高程 | 三维 | 高程 | 三维 | ||
| 数据集1 | 1 | 0.90 | 4.92 | 0.73 | 18.67 | 1.19 | 43.26 | 2.35 | 90.55 | 3.64 | 164.73 | 5.43 | 269.83 |
| 2 | 1.60 | 5.93 | 2.56 | 71.93 | 3.34 | 169.15 | 4.28 | 314.10 | 5.01 | 468.13 | 5.59 | 660.06 | |
| 3 | 1.87 | 5.13 | 2.85 | 17.19 | 3.62 | 45.31 | 4.56 | 119.43 | 5.30 | 206.17 | 5.91 | 337.80 | |
| 4 | 0.82 | 4.88 | 0.71 | 18.06 | 0.59 | 41.84 | 0.53 | 71.47 | 0.63 | 105.24 | 0.95 | 163.40 | |
| 数据集2 | 1 | 0.16 | 0.91 | 0.20 | 3.22 | 1.28 | 7.78 | 3.77 | 15.15 | 7.71 | 25.51 | 13.02 | 38.01 |
| 2 | 0.20 | 0.91 | 0.27 | 3.11 | 0.57 | 11.71 | 0.91 | 31.19 | 0.82 | 68.10 | 0.81 | 104.98 | |
| 3 | 0.23 | 0.96 | 0.30 | 3.67 | 0.59 | 13.66 | 0.94 | 40.35 | 0.85 | 61.93 | 0.84 | 113.56 | |
| 4 | 0.10 | 0.32 | 0.12 | 1.60 | 0.57 | 6.77 | 1.07 | 17.19 | 1.44 | 36.39 | 1.88 | 60.42 | |
Fig.10
Experiment trajectory and height variation during vehicle experiment of dataset 3"
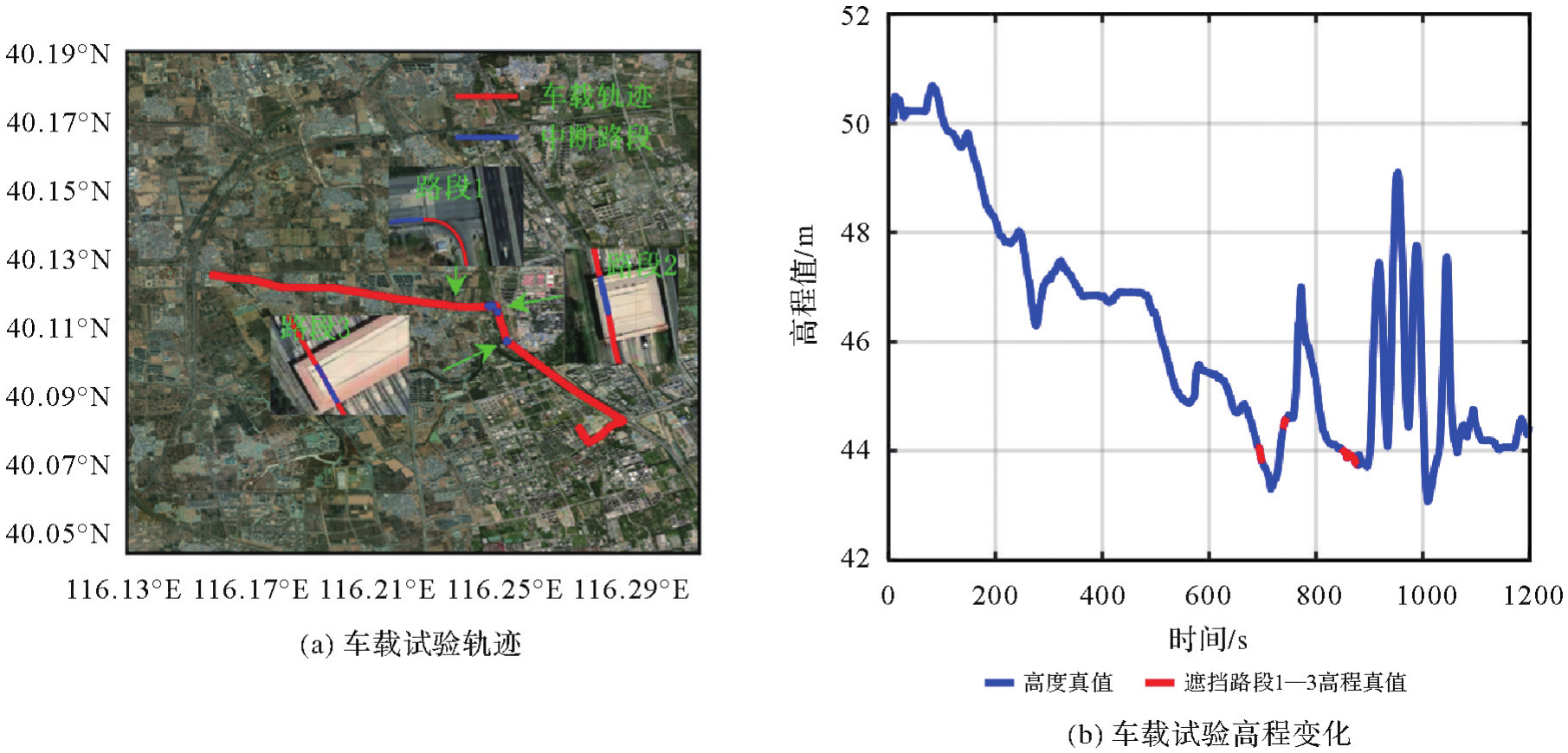
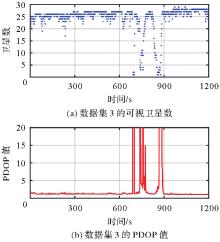
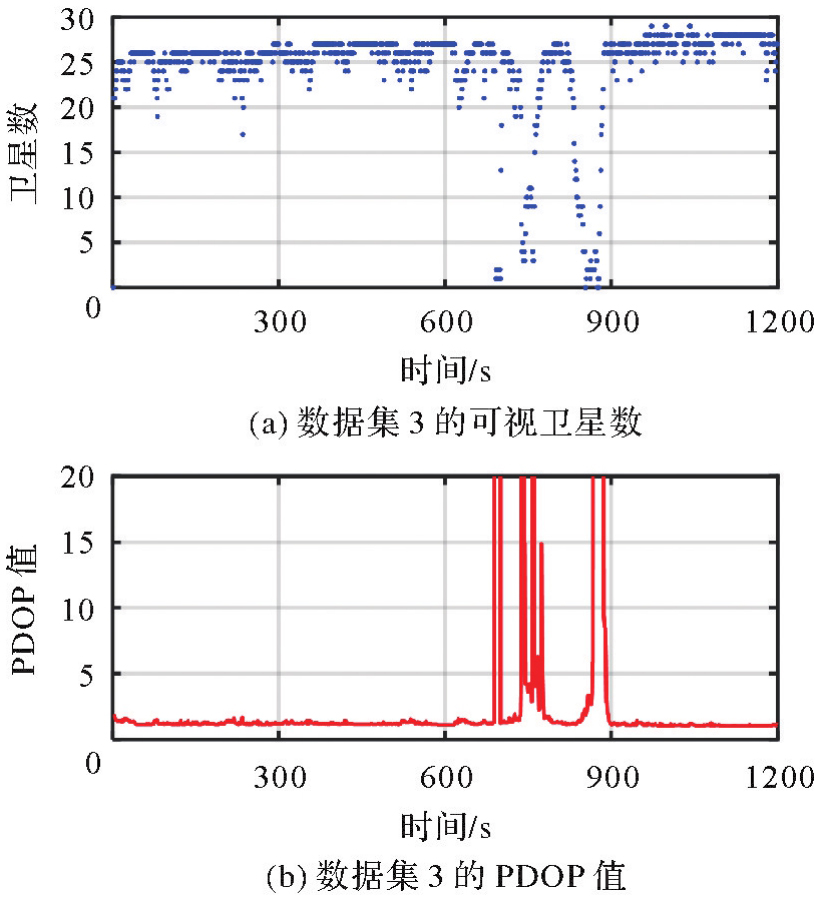
Fig.11
Number of visible satellites and corresponding PDOP"
Tab.9
Time span and road slope at occlusion"
| 设置 | 路段1 | 路段2 | 路段3 |
|---|---|---|---|
| 遮挡路段时间/s | 691~699 | 739~741,744,758 | 848~876 |
| 坡度/(%) | -0.27 | 1.86 | -1.85 |
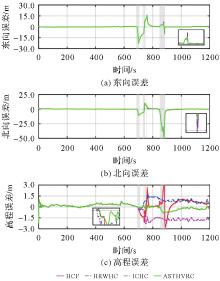
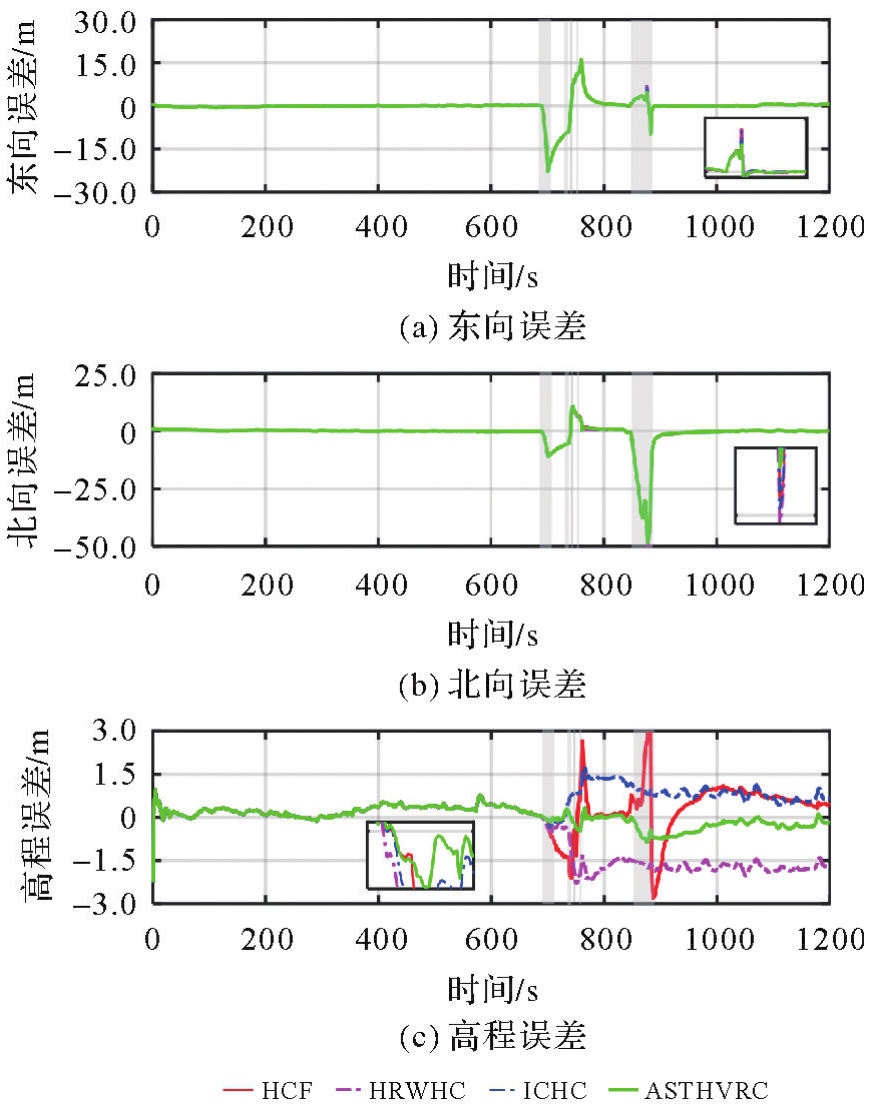
Fig.12
Positioning errors in three directions by different models"
Tab.10
RMS of positioning errors using four models"
| 模型 | 东方向 | 北方向 | 高程 |
|---|---|---|---|
| 1 | 3.20 | 5.72 | 0.67 |
| 2 | 3.19 | 5.71 | 0.63 |
| 3 | 3.20 | 5.75 | 1.10 |
| 4 | 3.18 | 5.64 | 0.32 |
Tab.11
RMS and absolute maximum height positioning errors of dataset 3"
| 模型 | 路段1 | 路段2 | 路段3 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 691~699 s | 739~741 s | 744 s | 758 s | 848~876 s | ||||||
| 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | 均方根 | 最大值 | |
| 1 | 0.05 | 0.08 | 2.03 | 2.08 | 1.54 | 1.54 | 0.99 | 0.99 | 1.27 | 2.68 |
| 2 | 0.20 | 0.34 | 0.91 | 1.04 | 1.48 | 1.48 | 1.95 | 1.95 | 1.58 | 1.73 |
| 3 | 0.12 | 0.23 | 0.72 | 0.77 | 0.80 | 0.80 | 0.90 | 0.90 | 0.98 | 1.18 |
| 4 | 0.05 | 0.07 | 0.07 | 0.11 | 0.14 | 0.14 | 0.44 | 0.44 | 0.54 | 0.86 |
| [1] | WANG Minghua, WANG Jiexian, DONG Danan, et al. Performance of BDS-3: satellite visibility and dilution of precision[J]. GPS Solutions, 2019, 23(2):56. |
| [2] | SHI Junbo, OUYANG Chenhao, HUANG Yongshuai, et al. Assessment of BDS-3 global positioning service: ephemeris, SPP, PPP, RTK, and new signal[J]. GPS Solutions, 2020, 24(3):81. |
| [3] | 杨元喜. 弹性PNT基本框架[J]. 测绘学报, 2018, 47(7):893-898. DOI: 10.11947/j.AGCS.2018.20180149. |
| YANG Yuanxi. Resilient PNT concept frame[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(7):893-898. DOI: 10.11947/j.AGCS.2018.20180149. | |
| [4] | 张小红, 李星星, 李盼. GNSS精密单点定位技术及应用进展[J]. 测绘学报, 2017, 46(10):1399-1407. DOI: 10.11947/j.AGCS.2017.20170327. |
| ZHANG Xiaohong, LI Xingxing, LI Pan. Review of GNSS PPP and its application[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10):1399-1407. DOI: 10.11947/j.AGCS.2017.20170327. | |
| [5] | HEGARTY C J, CHATRE E. Evolution of the global navigation satellite system (GNSS)[J]. Proceedings of the IEEE, 2008, 96(12):1902-1917. |
| [6] | KING A D. Inertial navigation-forty years of evolution[J]. GEC review, 1998, 13(3):140-149. |
| [7] | LI Bofeng, ZANG Nan, GE Haibo, et al. Single-frequency PPP models: analytical and numerical comparison[J]. Journal of Geodesy, 2019, 93(12):2499-2514. |
| [8] | LI Xingxing, WANG Huidan, LI Shengyu, et al. GIL: a tightly coupled GNSS PPP/INS/LiDAR method for precise vehicle navigation[J]. Satellite Navigation, 2021, 2(1):26. |
| [9] | CHANG Le, NIU Xiaoji, LIU Tianyi, et al. GNSS/INS/LiDAR-SLAM integrated navigation system based on graph optimization[J]. Remote Sensing, 2019, 11(9):1009. |
| [10] | LIU Fei, HAN Houzeng, CHENG Xin, et al. Performance of tightly coupled integration of GPS/BDS/MEMS-INS/odometer for real-time high-precision vehicle positioning in urban degraded and denied environment[J]. Journal of Sensors, 2020:8670262. |
| [11] | CHIANG Kaiwei, CHANG H W, LI Yuhua, et al. Assessment for INS/GNSS/odometer/barometer integration in loosely-coupled and tightly-coupled scheme in a GNSS-degraded environment[J]. IEEE Sensors Journal, 2020, 20(6):3057-3069. |
| [12] | VANA S, NACIRI N, BISNATH S. Benefits of motion constraining for robust, low-cost, dual-frequency gnss ppp+mems imu navigation[C]//Proceedings of 2020 IEEE/ION Position, Location and Navigation Symposium. Portland: IEEE, 2020: 1093-1103. |
| [13] | SUN Rui, YANG Yuanxi, CHIANG Kaiwei, et al. Robust IMU/GPS/VO integration for vehicle navigation in GNSS degraded urban areas[J]. IEEE Sensors Journal, 2020, 20(17):10110-10122. |
| [14] | 柴艳菊, 欧吉坤, 袁运斌, 等. 附加方位约束的GPS/INS组合系统选权自适应卡尔曼滤波[J]. 测绘学报, 2011, 40(4):421-428. |
| CHAI Yanju, OU Jikun, YUAN Yunbin, et al. The adaptive Kalman filtering for single antenna GPS/INS integrated system with heading angle constraint by selecting the parameter weights[J]. Acta Geodaetica et Cartographica Sinica, 2011, 40(4):421-428. | |
| [15] | DISSANAYAKE G, SUKKARIEH S, NEBOT E, et al. The aiding of a low-cost strapdown inertial measurement unit using vehicle model constraints for land vehicle applications[J]. IEEE Transactions on Robotics and Automation, 2001, 17(5):731-747. |
| [16] | CHENG Sixiang, CHENG Jianhua, ZANG Nan, et al. Adaptive non-holonomic constraint aiding multi-GNSS PPP/INS tightly coupled navigation in the urban environment[J]. GPS Solutions, 2023, 27(3):152. |
| [17] | KLEIN I, FILIN S, TOLEDO T. Vehicle constraints enhancement for supporting INS navigation in urban environments[J]. Navigation, 2011, 58(1):7-15. |
| [18] | NIU Xiaoji, ZHANG Hongping, CHIANG K W, et al. Using land-vehicle steering constraint to improve the heading estimation of MEMS GPS/INS georeferencing systems[C]//Proceedings of 2010 ISPRS-International Archives of the Photogrammetry. Kyoto: Remote Sensing Spatial Information Sciences, 2010: 1-5. |
| [19] | GODHA S, CANNON M E. GPS/MEMS INS integrated system for navigation in urban areas[J]. GPS Solutions, 2007, 11(3):193-203. |
| [20] | 柴艳菊, 阳仁贵, 王海涛, 等. 附加运动约束提高GPS/INS导航参数估计精度[J]. 中国惯性技术学报, 2011, 19(1):28-32. |
| CHAI Yanju, YANG Rengui, WANG Haitao, et al. Improving the navigation accuracy of GPS/INS by adding motion information constraints[J]. Journal of Chinese Inertial Technology, 2011, 19(1):28-32. | |
| [21] | 李彦杰, 杨元喜, 何海波. 附加约束条件对GNSS/INS组合导航结果的影响分析[J]. 武汉大学学报(信息科学版), 2017, 42(9):1249-1255. |
| LI Yanjie, YANG Yuanxi, HE Haibo. Effects analysis of constraints on GNSS/INS integrated navigation[J]. Geomatics and Information Science of Wuhan University, 2017, 42(9):1249-1255. | |
| [22] | 尹潇, 柴洪洲, 向民志, 等. 附加运动学约束的BDS抗差UKF导航算法[J]. 测绘学报, 2020, 49(11):1399-1406. DOI: 10.11947/j.AGCS.2020.20200149 |
| YIN Xiao, CHAI Hongzhou, XIANG Minzhi, et al. Robust UKF algorithm with motion constraint in BDS navigation[J]. Acta Geodaetica et Cartographica Sinica 2020, 49(11):1399-1406. DOI: 10.11947/j.AGCS.2020.2020149 | |
| [23] | YANG Jun, MA Jinfeng, LIU Xinning, et al. A height constrained adaptive Kalman filtering based on climbing motion model for GNSS positioning[J]. IEEE Sensors Journal, 2017, 17(21):7105-7113. |
| [24] | ZHANG Zhetao, LI Yuan, HE Xiufeng, et al. Resilient GNSS real-time kinematic precise positioning with inequality and equality constraints[J]. GPS Solutions, 2023, 27(3):116. |
| [25] | CHENG Sixiang, CHENG Jianhua, ZANG Nan, et al. A sequential student's t-based robust Kalman filter for multi-GNSS PPP/INS tightly coupled model in the urban environment[J]. Remote Sensing, 2022, 14(22):5878. |
| [26] | 王利, 张勤, 黄观文, 等. 基于指数平滑法的GPS卫星钟差预报[J]. 武汉大学学报(信息科学版), 2017, 42(7):995-1001. |
| WANG Li, ZHANG Qin, HUANG Guanwen, et al. GPS satellite clock bias prediction based on exponential smoothing method[J]. Geomatics and Information Science of Wuhan University, 2017, 42(7):995-1001. | |
| [27] | MONTGOMERY D C, PECK E A, VINING G G. Introduction to linear regression analysis[M].[S.l.]: John Wiley & Sons, 2021. |
| [28] | PAN Cheng, QIAN Nijia, LI Zengke, et al. A robust adaptive cubature Kalman filter based on SVD for dual-antenna GNSS/MIMU tightly coupled integration[J]. Remote Sensing, 2021, 13(10):1943. |
| [29] | CHEN Kai, CHANG Guobin, CHEN Chao. GINav: a Matlab-based software for the data processing and analysis of a GNSS/INS integrated navigation system[J]. GPS Solutions, 2021, 25(3):108. |
| [30] | 王甫红, 栾梦杰, 程雨欣, 等. 城市环境下智能手机车载GNSS/MEMS IMU紧组合定位算法[J]. 武汉大学学报(信息科学版), 2023, 48(7):1106-1116. |
| WANG Fuhong, LUAN Mengjie, CHENG Yuxin, et al. Smartphone GNSS/MEMS IMU tightly-coupled integration positioning method for vehicular navigation in urban conditions[J]. Geomatics and Information Science of Wuhan University, 2023, 48(7):1106-1116. | |
| [31] | 李正帅, 缪玲娟, 周志强, 等. 神经网络修正的速度约束辅助车载SINS定位算法[J]. 宇航学报, 2022, 43(9):1236-1245. |
| LI Zhengshuai, MIAO Lingjuan, ZHOU Zhiqiang, et al. Vehicle SINS positioning algorithm assisted by velocity constraint based on neural network modification[J]. Journal of Astronautics, 2022, 43(9):1236-1245. |
| [1] | Chengcheng ZHU, Zhen LI, Jinyun GUO, Maosheng ZHOU, Wanqiu LI. Improved latitude difference method for calculating crossover point position from wide-swath measurement data [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 673-683. |
| [2] | Xiaolei YANG, Yun XIAO, Liqing YANG, Xiaodong HONG, Enze GUO, Han WANG. Improved baseline method for time-variable gravity field recovery [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 708-720. |
| [3] | Yang LI, Haijun HUANG, Sulan LIU, Xiaohui WU, Qi LIU, Qipei PANG, Yunlong WU. Century-scale projection of terrestrial water storage anomaly and drought risk in the Poyang Lake Basin using a CMIP6-driven Transformer-GRU model [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 721-738. |
| [4] | Xiansheng YANG. Research on high-available visible light intelligent positioning technology [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 753-753. |
| [5] | Jijun GENG. Research on pedestrian indoor and outdoor positioning based on smartphone multi-sensor fusion [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 754-754. |
| [6] | Hongyang MA. Tropospheric corrections augmented PPP-AR: theory, methods and the application in aviation navigation [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 756-756. |
| [7] | Hang LIU. Research on low-latitude ionospheric scintillation monitoring and forecasting methods using ground-based GNSS and space-borne GNSS-R observations [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 758-758. |
| [8] | Haifeng LIU. Study on the spatiotemporal distribution of sporadic E layers based on GNSS radio occultation [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 759-759. |
| [9] | Jiayao WANG, Lin CHEN, Shiyuan CHENG, Lijun WANG, Siqi XIONG. Artificial intelligence empowering the digital-intelligent transformation of cartographic science [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 381-389. |
| [10] | Tangting WU, Xinyu LUO, Liguo LU, Zhanke LIU, Nengfang CHAO. Assessment of water resource changes and drought characteristics in the Shaanxi, Gansu and Ningxia region based on GNSS and GRACE/GRACE-FO [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 439-450. |
| [11] | Zhongmin MA, Shuangcheng ZHANG, Xin ZHOU, Qi LIU, Ning LIU, Hengli WANG. A flood monitoring method using FY-3 GNSS-R accounting for surface reflectivity uncertainty: a case study of the August 2 Guangdong rainstorm disaster [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 451-464. |
| [12] | Rui ZHOU, Feng ZHU, Xiaohong ZHANG. Camera-IMU extrinsic calibration based on prior poses and motion planning [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 465-476. |
| [13] | Jingxuan LIU, Xuexi LIU, Kefei ZHANG, Chao YANG, Suqin WU, Shouqing ZHU, Fudong GUO. A prediction method for LOD based on combined LSTM and WLS [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 477-489. |
| [14] | Wentao HOU, Yun XIAO, Jie CAO, Yukang WANG, Chunting CAO, Han WANG. A downscaling method for gravity satellite derived groundwater storage changes based on a feature-weighted CatBoost model [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 490-501. |
| [15] | Lei XU. Study on the theory and method of fine modeling of GNSS regional ionosphere [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 565-565. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||