

Acta Geodaetica et Cartographica Sinica ›› 2024, Vol. 53 ›› Issue (8): 1624-1633.doi: 10.11947/j.AGCS.2024.20230198
• Photogrammetry and Remote Sensing • Previous Articles Next Articles
Tao XU1( ), Yuanwei YANG1(), Xianjun GAO1,2, Zhiwei WANG3, Yue PAN3, Shaohua LI1, Lei XU4, Yanjun WANG5,6, Bo LIU2, Jing YU7, Fengmin WU7, Haoyu SUN1
), Yuanwei YANG1(), Xianjun GAO1,2, Zhiwei WANG3, Yue PAN3, Shaohua LI1, Lei XU4, Yanjun WANG5,6, Bo LIU2, Jing YU7, Fengmin WU7, Haoyu SUN1
Received:2023-06-08
Online:2024-09-25
Published:2024-09-25
Contact:
Yuanwei YANG
E-mail:2021720578@yangtze.edu.cn;2021720578@yangtze.edu.cn;yyw_08@yangtzeu.edu.cn
About author:XU Tao (1998—), male, postgraduate, majors in the semantic segmentation of 3D point cloud data. E-mail: 2021720578@yangtze.edu.cn
Supported by:CLC Number:
Tao XU, Yuanwei YANG, Xianjun GAO, Zhiwei WANG, Yue PAN, Shaohua LI, Lei XU, Yanjun WANG, Bo LIU, Jing YU, Fengmin WU, Haoyu SUN. Integrated graph convolution and multi-scale features for the overhead catenary system point cloud semantic segmentation[J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(8): 1624-1633.

Fig.1
GDM-net network"
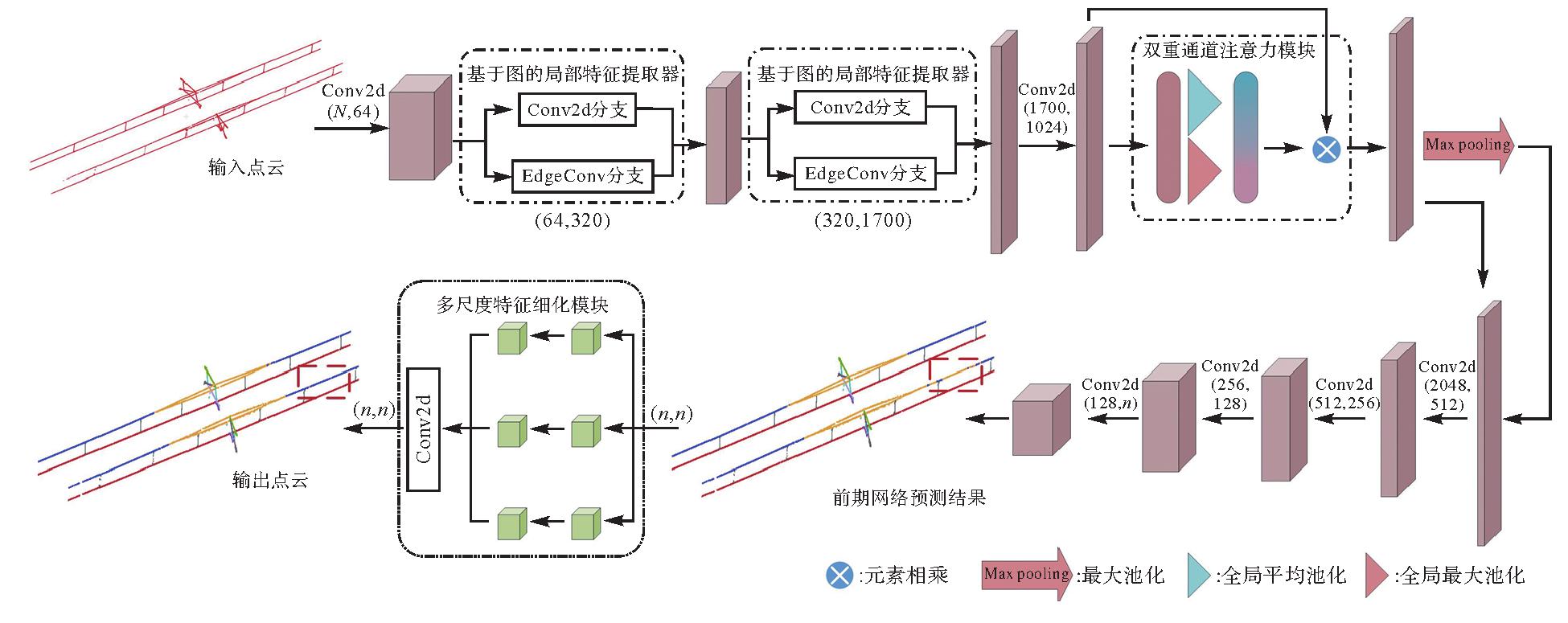
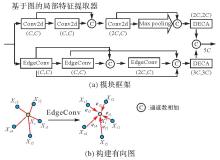
Fig.2
Graph-based local feature extractor"
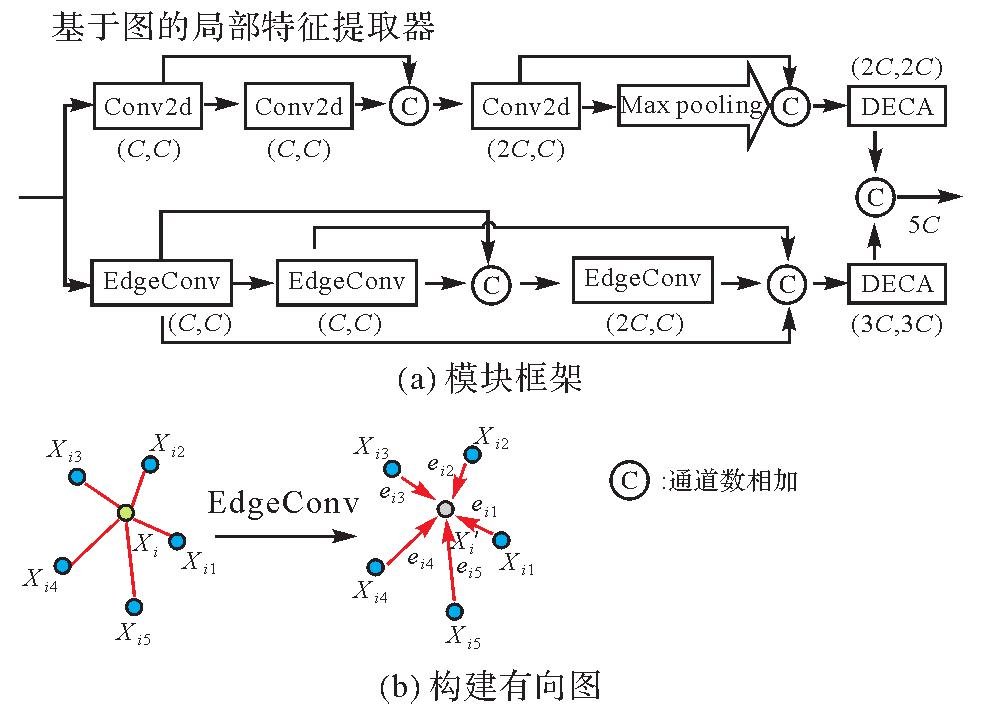
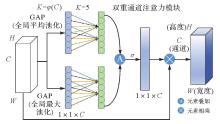
Fig.3
The structure of dual-channel attention model"
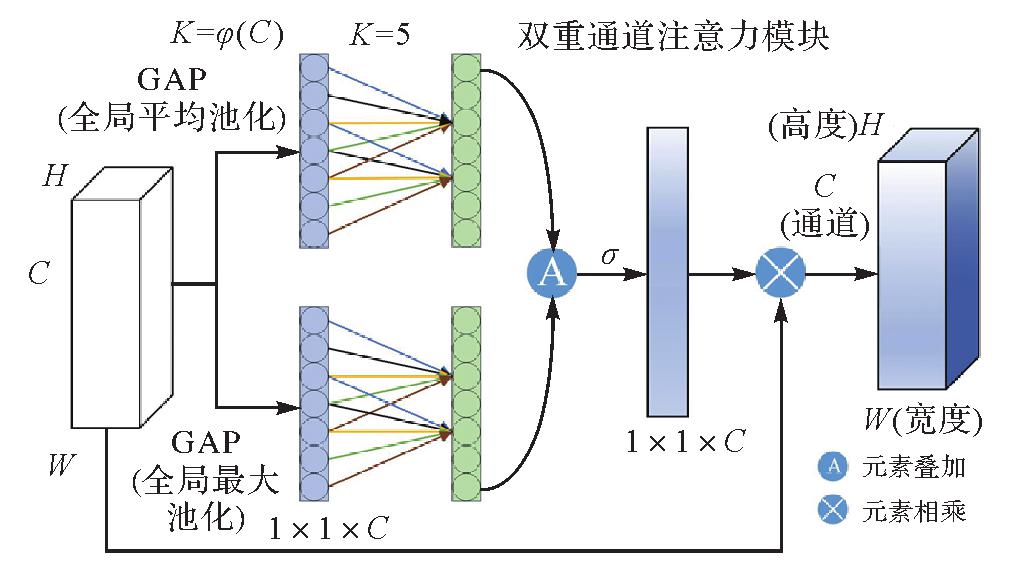

Fig.4
The multi-scale feature refinement module"
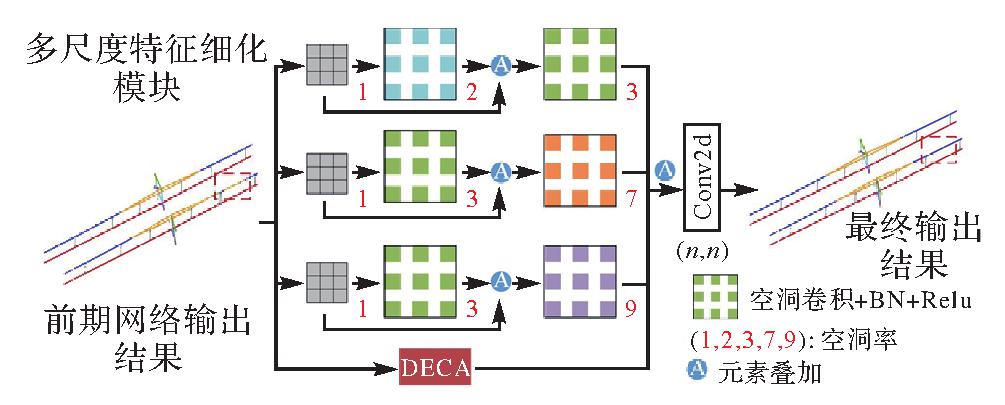
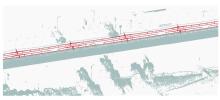
Fig.5
The OCS extraction point cloud results by preprocessing"

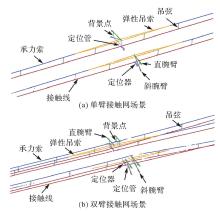
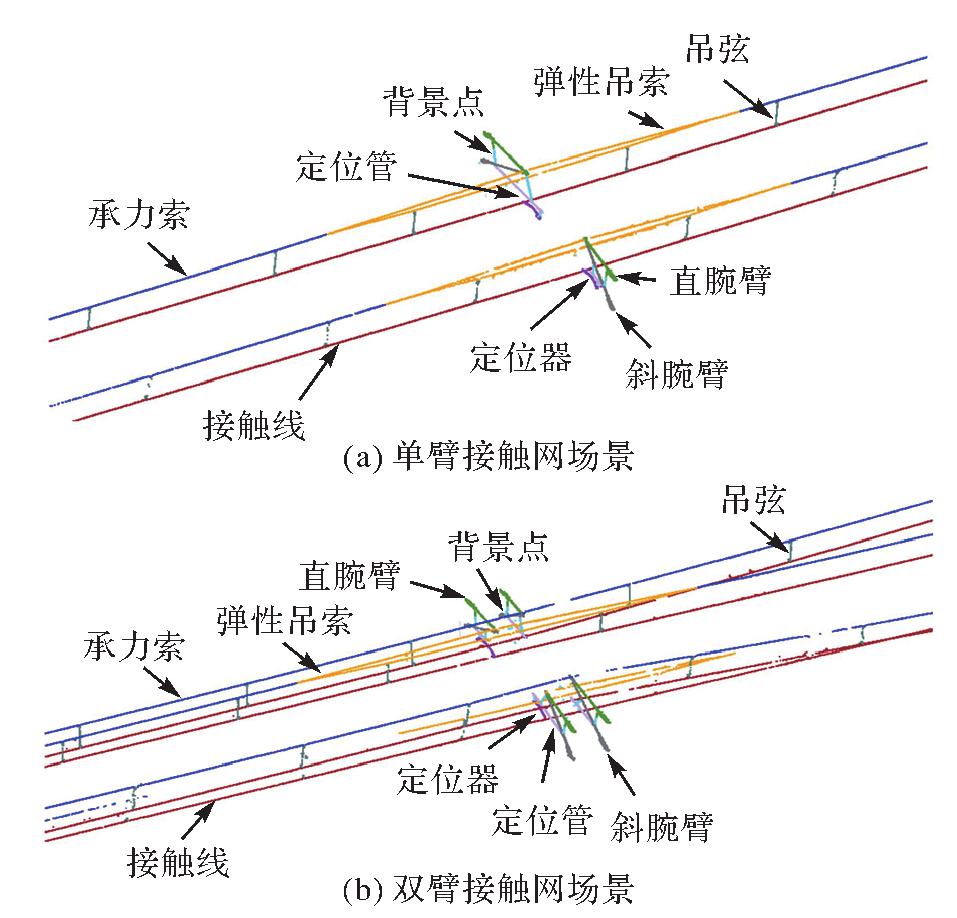
Fig.6
Component of the OCS"
Tab.1
Data distribution introduction in the OCS dataset"
| 数据集 | 单臂 | 双臂 | 训练集 | 验证集 | 测试集 | |||
|---|---|---|---|---|---|---|---|---|
| 单臂 | 双臂 | 单臂 | 双臂 | 单臂 | 双臂 | |||
| 场景数 | 68 | 20 | 55 | 15 | 11 | 4 | 2 | 1 |
| 点的数量 | 3.54×107 | 1.4×107 | 2.9×107 | 1.1×107 | 5.7×106 | 2.8×106 | 1.04×106 | 7×105 |
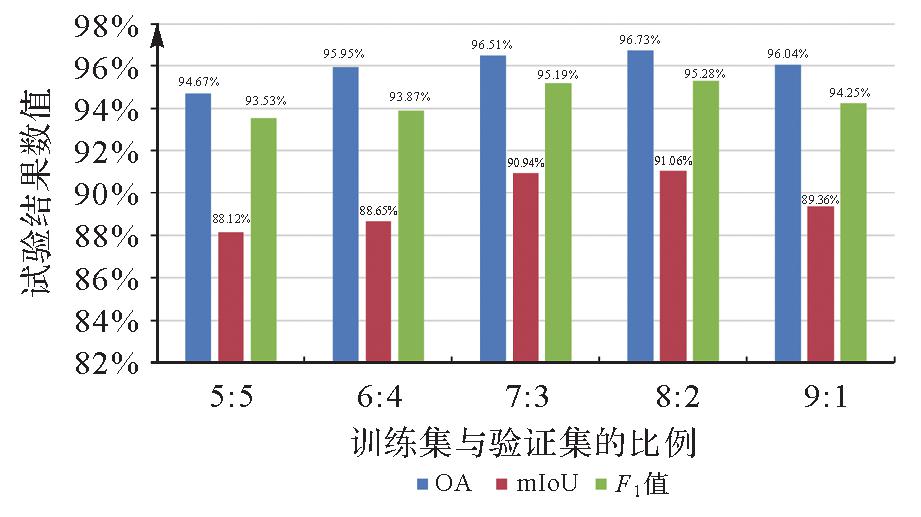
Fig.7
Quantitative comparison of different training/testing ratios"
Tab.2
Quantitative evaluation results of the comparative methods for each category in the OCS dataset"
| 方法 | 评价精度 | 承力索 | 定位器 | 斜腕臂 | 直腕臂 | 弹性吊索 | 定位管 | 背景 | 吊弦 | 接触线 |
|---|---|---|---|---|---|---|---|---|---|---|
| PointNet | P | 83.20 | 70.23 | 77.09 | 74.70 | 79.42 | 62.24 | 50.04 | 88.17 | 98.29 |
| R | 90.54 | 81.88 | 92.94 | 98.16 | 63.18 | 87.72 | 48.32 | 57.58 | 97.03 | |
| mIoU | 76.55 | 60.79 | 72.82 | 73.67 | 64.29 | 61.25 | 50.09 | 53.46 | 95.42 | |
| F1值 | 86.72 | 75.61 | 84.28 | 84.84 | 70.38 | 72.82 | 49.17 | 69.67 | 97.66 | |
| PointNet++ | P | 86.86 | 96.36 | 94.63 | 94.56 | 84.65 | 91.63 | 87.76 | 83.66 | 96.1 |
| R | 90.65 | 93.65 | 96.28 | 92.34 | 86.33 | 93.36 | 87.36 | 83.09 | 98.19 | |
| mIoU | 76.12 | 86.95 | 91.36 | 91.92 | 72.58 | 88.50 | 79.36 | 80.91 | 94.93 | |
| F1值 | 88.71 | 94.99 | 95.46 | 93.45 | 85.48 | 92.49 | 87.56 | 83.37 | 97.13 | |
| DGCNN | P | 92.81 | 98.55 | 96.62 | 96.56 | 86.80 | 93.07 | 87.98 | 85.61 | 99.33 |
| R | 92.69 | 94.74 | 94.89 | 96.56 | 87.80 | 95.51 | 87.29 | 85.69 | 99.19 | |
| mIoU | 86.48 | 93.44 | 91.85 | 93.34 | 77.46 | 89.17 | 77.99 | 74.90 | 98.53 | |
| F1值 | 92.75 | 96.61 | 95.75 | 96.56 | 87.30 | 94.27 | 87.63 | 85.65 | 99.26 | |
| PointNeXt | P | 90.34 | 98.56 | 99.27 | 94.70 | 95.18 | 96.55 | 93.31 | 94.25 | 98.87 |
| R | 96.65 | 96.07 | 94.98 | 98.87 | 85.69 | 98.69 | 92.86 | 88.56 | 99.71 | |
| mIoU | 87.60 | 94.75 | 94.32 | 93.69 | 82.13 | 95.33 | 87.06 | 84.03 | 98.58 | |
| F1值 | 93.39 | 97.30 | 97.08 | 96.74 | 90.19 | 97.61 | 93.08 | 91.32 | 99.29 | |
| Pix4point | P | 96.49 | 96.59 | 99.36 | 94.76 | 91.56 | 87.91 | 91.12 | 89.71 | 99.56 |
| R | 97.26 | 93.67 | 95.05 | 98.48 | 93.86 | 97.85 | 92.13 | 88.46 | 99.44 | |
| mIoU | 91.13 | 90.67 | 94.47 | 93.39 | 86.39 | 86.24 | 89.90 | 77.89 | 99.00 | |
| F1值 | 96.87 | 95.11 | 97.16 | 96.59 | 92.70 | 92.61 | 91.62 | 89.08 | 99.50 | |
| GDM-Net | P | 96.25 | 98.69 | 98.15 | 96.24 | 94.53 | 91.64 | 93.61 | 91.84 | 99.53 |
| R | 96.85 | 94.67 | 95.16 | 97.81 | 90.18 | 97.91 | 92.94 | 87.38 | 99.61 | |
| mIoU | 91.45 | 93.49 | 93.48 | 94.21 | 87.71 | 89.88 | 89.06 | 81.09 | 99.15 | |
| F1值 | 95.53 | 96.64 | 96.63 | 97.02 | 92.31 | 94.67 | 93.27 | 89.56 | 99.57 |
Tab.3
Quantitative evaluation of the comparative methods on the OCS point cloud dataset"
| 方法 | P | R | OA | mIoU | F1值 |
|---|---|---|---|---|---|
| PointNet | 75.93 | 79.70 | 88.26 | 64.09 | 77.77 |
| PointNet++ | 90.69 | 91.25 | 92.34 | 84.37 | 90.96 |
| DGCNN | 93.04 | 92.71 | 94.93 | 87.02 | 92.87 |
| PointNeXt | 95.67 | 94.68 | 96.05 | 90.83 | 95.17 |
| Pix4point | 94.12 | 95.13 | 96.54 | 89.90 | 94.62 |
| GDM-Net | 95.61 | 94.94 | 96.73 | 91.06 | 95.28 |

Fig.8
Semantic segmentation results of the OCS point cloud based on different methods"

Tab.4
Comparison of network parameter quantity, FLOPs and test time of the six methods"
| 方法 | 参数 | FLOPs | 每点测试时间/μs |
|---|---|---|---|
| PointNet | 3.55×106 | 58.53×109 | 16.21 |
| PointNet++ | 1.24×106 | 10.72×109 | 20.51 |
| DGCNN | 2.64×106 | 64.24×109 | 17.35 |
| PointNeXt | 41.60×106 | 84.80×109 | 18.81 |
| Pix4Point | 23.70×106 | 190.00×109 | 21.36 |
| GDM-Net | 3.42×106 | 133.87×109 | 24.41 |
Tab.5
Quantitative evaluation of the comparative methods on the urban railway dataset"
| 方法 | mIoU | 类别名称 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 轨道 | 道床 | 悬链线 | 围栏 | 植被 | 立柱 | 钢结构 | 地面 | 建筑物 | 支持装置 | 背景点 | ||
| PointNet | 11.72 | 5.51 | 6.83 | 13.66 | 7.01 | 38.20 | 2.36 | 7.66 | 25.49 | 6.45 | 7.56 | 8.21 |
| PointNet++ | 34.28 | 25.86 | 36.63 | 56.36 | 15.63 | 60.82 | 9.62 | 23.36 | 57.36 | 32.36 | 28.69 | 30.35 |
| DGCNN | 24.05 | 21.08 | 16.89 | 26.31 | 17.21 | 61.15 | 9.63 | 8.65 | 38.15 | 19.63 | 9.56 | 36.30 |
| PointNeXt | 75.19 | 80.72 | 73.23 | 62.92 | 81.61 | 88.28 | 65.39 | 74.64 | 83.36 | 90.82 | 60.61 | 65.59 |
| Pix4Point | 71.54 | 71.84 | 44.66 | 74.19 | 45.19 | 89.99 | 64.34 | 67.81 | 79.72 | 91.58 | 62.64 | 94.94 |
| GDM-Net | 81.52 | 90.63 | 78.69 | 76.33 | 88.37 | 93.61 | 68.37 | 72.63 | 85.39 | 85.68 | 68.36 | 88.65 |
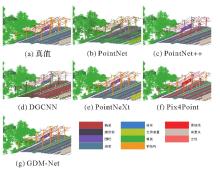
Fig.9
Visualization comparison of semantic segmentation results for WHU-railway 3D dataset"
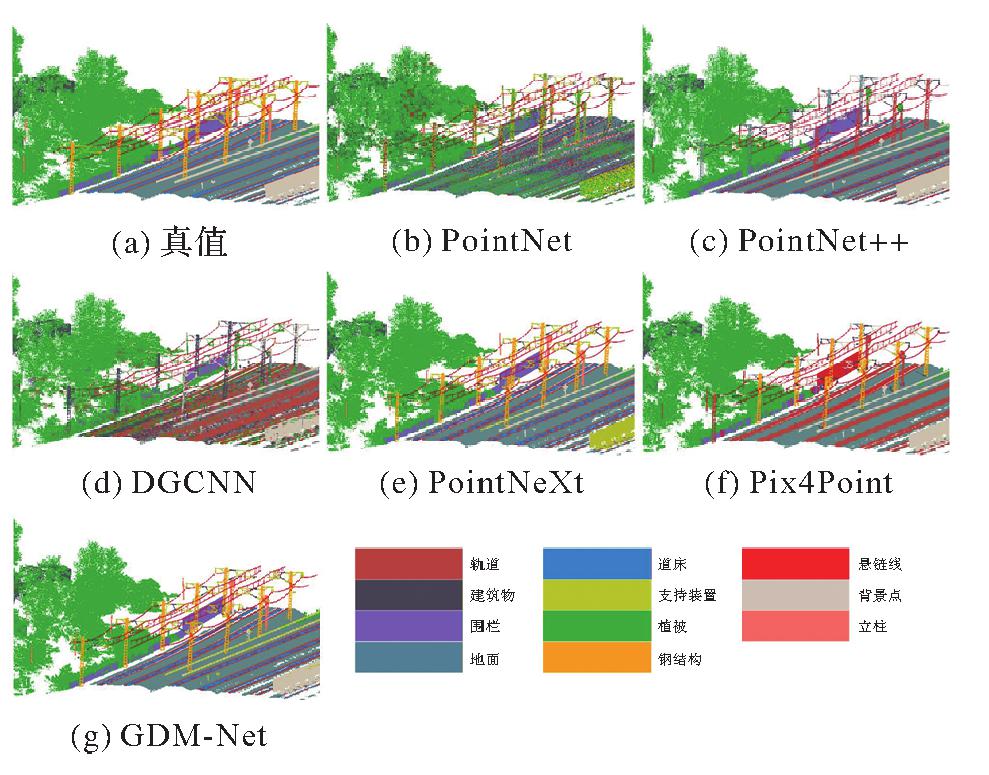

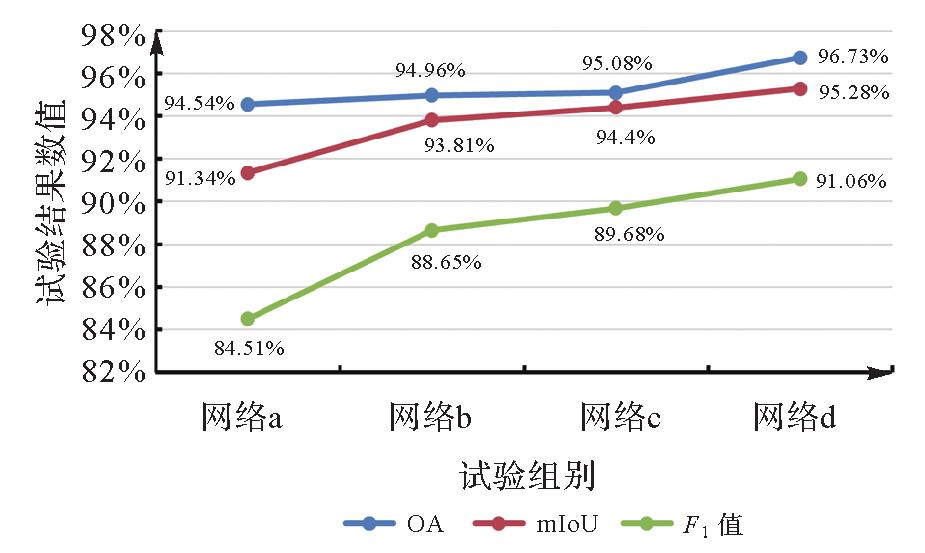
Fig.10
Accuracy comparison diagram of innovative module network"
| [1] | LIN Shuai, XU Cheng, CHEN Lipei, et al. LiDAR point cloud recognition of overhead catenary system with deep learning[J]. Sensors, 2020, 20(8): 2212-2228. |
| [2] | TU Xiaohan, XU Cheng, LIU Siping, et al. LiDAR point cloud recognition and visualization with deep learning for overhead contact inspection[J]. Sensors, 2020, 20(21): 6387-6404. |
| [3] | 杨元维, 张跃, 高贤君, 等. 顾及空间关系的3D LiDAR铁路支持装置自动提取[J]. 浙江大学学报(工学版), 2022, 56(10): 2066-2076. |
| YANG Yuanwei, ZHANG Yue, GAO Xianjun, et al. Automatic extraction of spatially relevant 3D LiDAR railway support facility[J]. Journal of Zhejiang University (Engineering Science), 2022, 56(10): 2066-2076. | |
| [4] | 杨必胜, 梁福逊, 黄荣刚. 三维激光扫描点云数据处理研究进展、挑战与趋势[J]. 测绘学报, 2017, 46(10): 1509-1516. DOI: 10.11947/j.AGCS.2017.20170351. |
| YANG Bisheng, LIANG Fuxun, HUANG Ronggang. Progress, challenges and perspectives of 3D LiDAR point cloud processing[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1509-1516. DOI: 10.11947/j.AGCS.2017.20170351. | |
| [5] | 周靖松, 韩志伟, 杨长江. 基于三维点云的接触网几何参数检测方法[J]. 仪器仪表学报, 2018, 39(4): 239-246. |
| ZHOU Jingsong, HAN Zhiwei, YANG Changjiang. Catenary geometric parameters detection method based on 3D point cloud[J]. Chinese Journal of Scientific Instrument, 2018, 39(4): 239-246. | |
| [6] | 张东, 余朝刚. 基于激光扫描的接触网几何参数检测方法研究[J]. 计算机测量与控制, 2016, 24(1): 57-60. |
| ZHANG Dong, YU Chaogang. Catenary geometry parameter detection method based on laser scanning[J]. Computer Measurement & Control, 2016, 24(1): 57-60. | |
| [7] | 罗隆福, 叶威, 王健. 基于深度学习的高铁接触网顶紧螺栓的缺陷检测[J]. 铁道科学与工程学报, 2021, 18(3): 605-614. |
| LUO Longfu, YE Wei, WANG Jian. Defect detection of the puller bolt in high-speed railway catenary based on deep learning[J]. Journal of Railway Science and Engineering, 2021, 18(3): 605-614. | |
| [8] | XIE Yuxing, TIAN Jiaojiao, ZHU Xiaoxiang. Linking points with labels in 3D: a review of point cloud semantic segmentation[J]. IEEE Geoscience and Remote Sensing Magazine, 2020, 8(4): 38-59. |
| [9] | DERPANIS K G. Overview of the RANSAC algorithm[J]. Image Rochester NY, 2010, 4(1): 2-3. |
| [10] | SCHUBERT E, SANDER J, ESTER M, et al. DBSCAN revisited, revisited: why and how you should (still) use DBSCAN[J]. ACM Transactions on Database Systems, 2017, 42(3): 1-21. |
| [11] | AHMAD A, DEY L. A k-mean clustering algorithm for mixed numeric and categorical data[J]. Data & Knowledge Engineering, 2007, 63(2): 503-527. |
| [12] | ZHANG Jixian, LIN Xiangguo, NING Xiaogang. SVM-based classification of segmented airborne LiDAR point clouds in urban areas[J]. Remote Sensing, 2013, 5(8): 3749-3775. |
| [13] | 孙杰, 赖祖龙. 利用随机森林的城区机载LiDAR数据特征选择与分类[J]. 武汉大学学报(信息科学版), 2014, 39(11): 1310-1313. |
| SUN Jie, LAI Zulong. Airborne LiDAR feature selection for urban classification using random forests[J]. Geomatics and Information Science of Wuhan University, 2014, 39(11): 1310-1313. | |
| [14] | LALONDE J F, UNNIKRISHNAN R, VANDAPEL N, et al. Scale selection for classification of point-sampled 3D surfaces[C]//Proceedings of 2005 International Conference on 3D Digital Imaging and Modeling. Ottawa: IEEE, 2005: 285-292. |
| [15] | 张广斌, 高贤君, 冉树浩, 等. 高分遥感影像云雪共存区轻量云高精度检测方法[J]. 测绘学报, 2023, 52(1): 93-107. DOI: 10.11947/j.AGCS.2023.20210686. |
| ZHANG Guangbin, GAO Xianjun, RAN Shuhao, et al. Accurate and lightweight cloud detection method based on cloud and snow coexistence region of high-resolution remote sensing images[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(1): 93-107. DOI: 10.11947/j.AGCS.2023.20210686. | |
| [16] | 张佳颖, 赵晓丽, 陈正. 基于深度学习的点云语义分割综述[J]. 激光与光电子学进展, 2020, 57(4): 28-46. |
| ZHANG Jiaying, ZHAO Xiaoli, CHEN Zheng. Review of semantic segmentation of point cloud based on deep learning[J]. Laser & Optoelectronics Progress, 2020, 57(4): 28-46. | |
| [17] | YANG Zhixin, TANG Lulu, ZHANG Kun, et al. Multi-view CNN feature aggregation with ELM auto-encoder for 3D shape recognition[J]. Cognitive Computation, 2018, 10(6): 908-921. |
| [18] | RIEGLER G, ULUSOY A O, GEIGER A. OctNet: learning deep 3D representations at high resolutions[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 6620-6629. |
| [19] | CHARLES R Q, SU H, MO K C, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 77-85. |
| [20] | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[J]. Advances in Neural Information Processing Systems, 2017, 30: 5099-5108. |
| [21] | WANG Yue, SUN Yongbin, LIU Ziwei, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38(5): 1-12. |
| [22] | GRAHAM B, ENGELCKE M, VAN DER MAATEN L. 3D semantic segmentation with submanifold sparse convolutional networks[C]//Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 9224-9232. |
| [23] | WANG Qilong, WU Banggu, ZHU Pengfei, et al. ECA-net: efficient channel attention for deep convolutional neural networks[C]//Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 11531-11539. |
| [24] | JIANG Tengping, YANG Bisheng, WANG Yongjun, et al. RailSeg: learning local-global feature aggregation with contextual information for railway point cloud semantic segmentation [J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 1-29. |
| [25] | RUBINSTEIN R Y, KROESE D P. A tutorial introduction to the cross-entropy method[M]//Information science and statistics. New York: Springer, 2004: 29-58. |
| [26] | CHEN Zhanlong, LI Shuangjiang, XU Yongyang, et al. Correg-Yolov3: a method for dense buildings detection in high-resolution remote sensing images[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(2): 51-61. |
| [27] | QIAN Guocheng, LI Yuchen, PENG Houwen, et al. Pointnext: revisiting Pointnet++ with improved training and scaling strategies[J]. Advances in Neural Information Processing Systems, 2022, 35: 23192-23204. |
| [1] | Zhuang SUN, Po LIU, Liang ZHAI, Yu HE, Zutao ZHANG. A self-supervised matching method for polygonal geographic entity based on a three-branch attention network [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(1): 169-180. |
| [2] | Weitong WU, Chi CHEN, Bisheng YANG, Xiufeng HE. Robust multi-sensor fusion-based odometry method of LiDAR, millimeter-wave radar and IMU in degraded scenes [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(9): 1677-1686. |
| [3] | Dongdong PU, Hongzhou CHAI, Yongzhong OUYANG, Chao DONG. Hierarchical encryption matching algorithm for adjacent strip splicing in airborne LiDAR bathymetry [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(8): 1439-1451. |
| [4] | Qing CHENG, Boxuan WANG, Hongyan ZHANG. DRformer: a progressive coupled multiscale CNN and condensed attention Transformer method for hyperspectral image super-resolution [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1230-1242. |
| [5] | Jie WAN, Zhong XIE, Yongyang XU, Liufeng TAO. A U-shaped graph convolution network method for semantic segmentation of vehicle LiDAR point clouds towards urban road scenes [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1280-1293. |
| [6] | Dianpeng SU, Bin WANG, Xiaozheng MAI, Huang MENG, Chao QI, Fanlin YANG. Calibration of placement angle errors of airborne bathymetric LiDAR without field control [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(6): 1042-1053. |
| [7] | Lianzhong XU, Chuanfa CHEN, Dongxing CHEN, Xingjie WANG, Ziming YANG, Shufan YANG, Zhuangzhuang HONG, Jinda HAO. An efficient filtering method considering terrain features for large-scale airborne LiDAR point clouds [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(6): 1082-1093. |
| [8] | Haolong GAO, Shaobo LI, Jianhu ZHAO. Multipath negative outlier removal method for coastal LiDAR point clouds based on mirror structure and intensity feature constraints [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(5): 840-852. |
| [9] | Yiming ZHAO, Kelin HU, Kelong TU, Yaxian QING, Chao YANG, Kunlun QI, Huayi WU. Multi-label scene classification method based on fusion of SAR and optical remote sensing images [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(5): 911-923. |
| [10] | Xing ZHANG, Zhanpeng HUANG, Qingquan LI, Baoding ZHOU, Qipei LI. 3D tunnel mapping method combining registration compensation and spatial constraint [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(2): 297-307. |
| [11] | Yupeng GU, Wanke LIU, Xiaohong ZHANG, Jie HU, Shujie HU, Weihao LEI, Kai ZHENG. Neural network-based GNSS stochastic model generation method by fisheye images [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(12): 2206-2218. |
| [12] | Yungang CAO, Peng YANG, Jiangbo GONG, Gao ZHU, Xingyu SHEN. A road extraction method integrating spatial-relation enhancement and heterogeneous feature fusion [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(12): 2219-2232. |
| [13] | Xiong PAN, Zixuan ZHAO, Chang PING, Lihong JIN, Lilong LIU. Ionospheric TEC prediction incorporating semi-parametric and rule-learning [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1741-1756. |
| [14] | Yongjun ZHANG, Changjun ZHU, Siyuan ZOU, Xinyi LIU, Qingzhou MAO, Yi WAN. Registration of aerial images and LiDAR point clouds based on distance field and plane constraints [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 64-74. |
| [15] | Yanjun WANG, Xuchao TANG, Cheng WANG, Hengfan CAI. Urban and rural road surface extraction network based on road topological correlation features [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(1): 75-89. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||