

Acta Geodaetica et Cartographica Sinica ›› 2026, Vol. 55 ›› Issue (4): 698-707.doi: 10.11947/j.AGCS.2026.20260028
• Geodesy and Navigation • Previous Articles Next Articles
Siyuan BAI( ), Hongzhou CHAI(), Qing WU, Gen LI, Yuhao YE, Honglei MA
), Hongzhou CHAI(), Qing WU, Gen LI, Yuhao YE, Honglei MA
Received:2026-02-05
Revised:2026-04-09
Online:2026-05-11
Published:2026-05-11
Contact:
Hongzhou CHAI
E-mail:baisiyuan_kyle@foxmail.com;chaihz1969@163.com
About author:BAI Siyuan (2000—), male, PhD candidate, majors in UUV polar region integrated navigation. E-mail: baisiyuan_kyle@foxmail.com
Supported by:CLC Number:
Siyuan BAI, Hongzhou CHAI, Qing WU, Gen LI, Yuhao YE, Honglei MA. Buoys-aided integrated navigation method for UUV under ice with sea ice drift compensation[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 698-707.
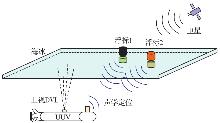
Fig. 1
UUV positioning under ice assisted by double buoys"
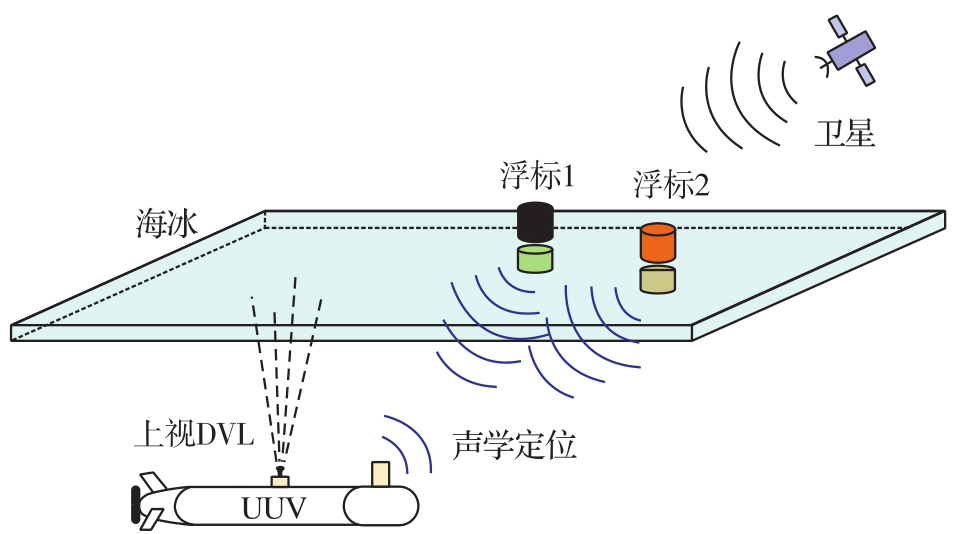
Fig. 2
Top view of sea ice drift"
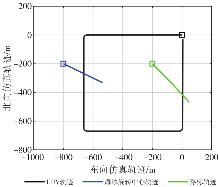
Fig. 3
Singlebuoy-assistedUUVunder-ice simulated navigation trajectory"
Tab. 1
Simulation parameters of UUV sensors"
| 传感器 | 参数 | 取值 |
|---|---|---|
| 陀螺仪 | 零偏/((°)/h) | 0.2 |
随机游走/ | 0.01 | |
| 加速度计 | 零偏/μg | 100 |
随机游走/ | 50 | |
| DVL | 随机误差(1σ)/(m/s) | [0.1,0.1,0.1] |
| 声学测距 | 随机误差(1σ)/m | 3 |
| GNSS | 随机误差(1σ)/m | [1,1,1] |
| PS | 随机误差(1σ)/m | 0.1 |
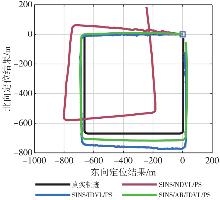
Fig. 4
Singlebuoy-assistedUUVunder-ice positioning results"
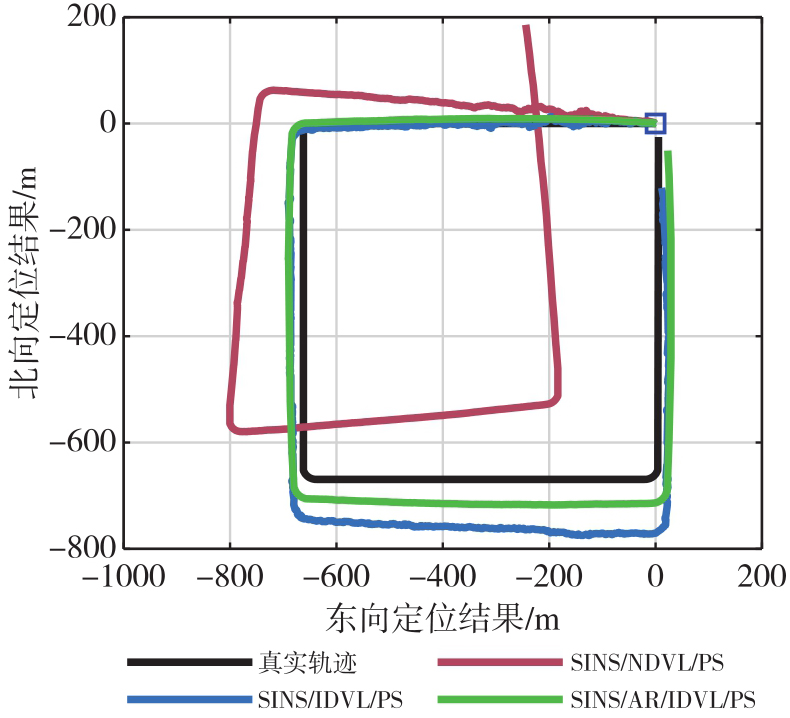
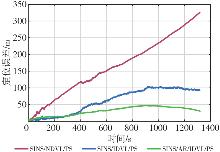
Fig. 5
Singlebuoy-assistedUUVunder-ice positioning error comparison"
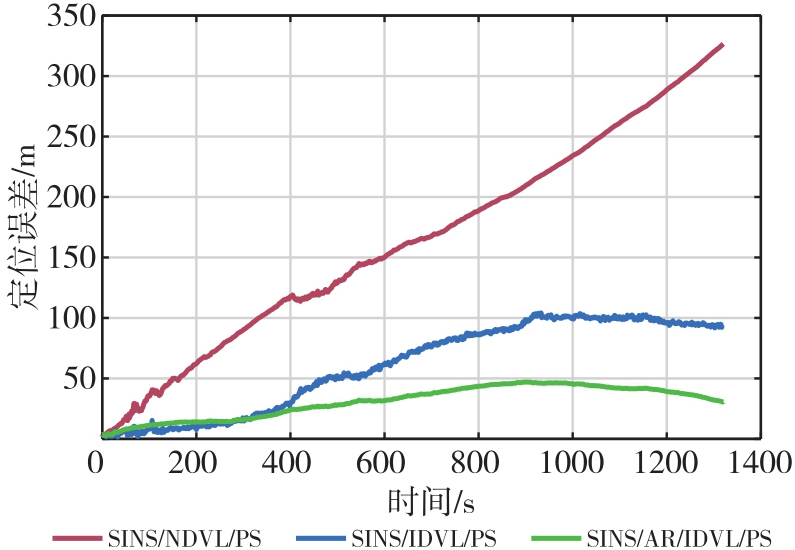
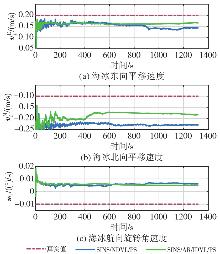
Fig. 6
Sea ice drift parameter estimation results of single buoy positioning"
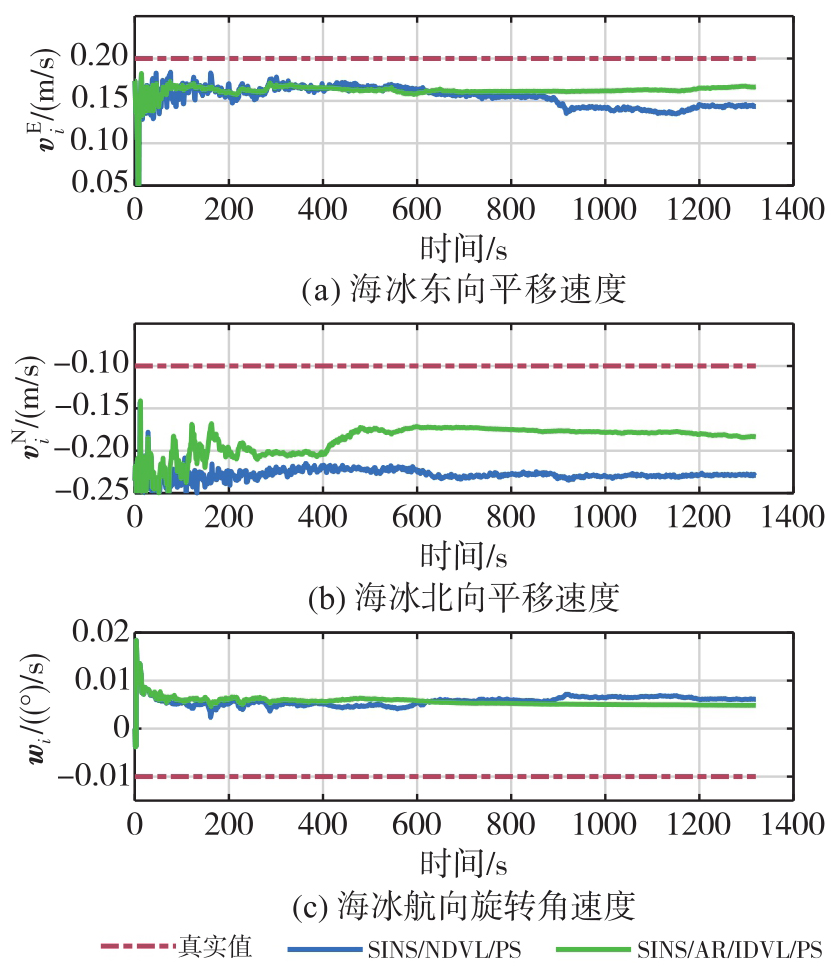
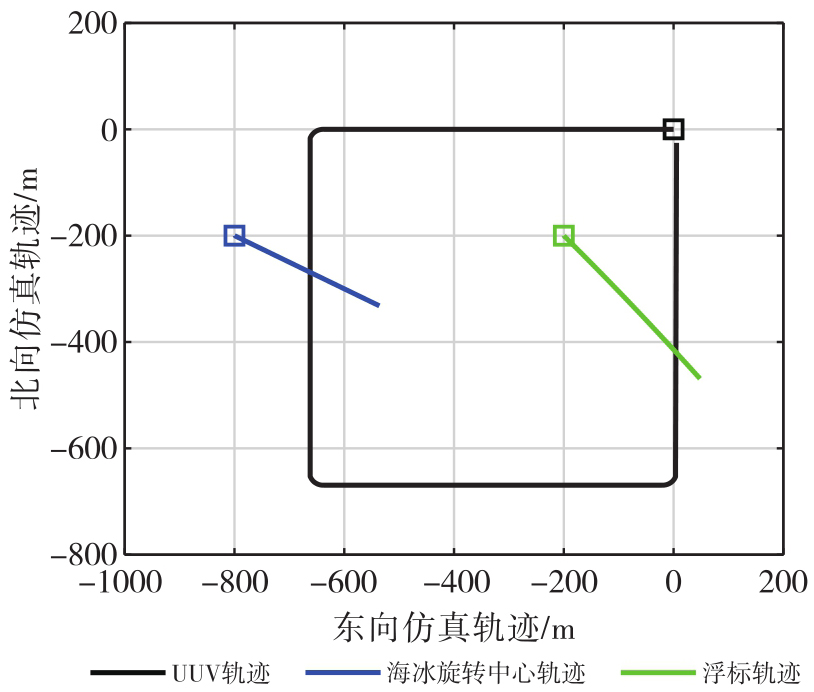
Fig. 7
Dual buoy-assisted UUV under-ice simulated navigation trajectory"
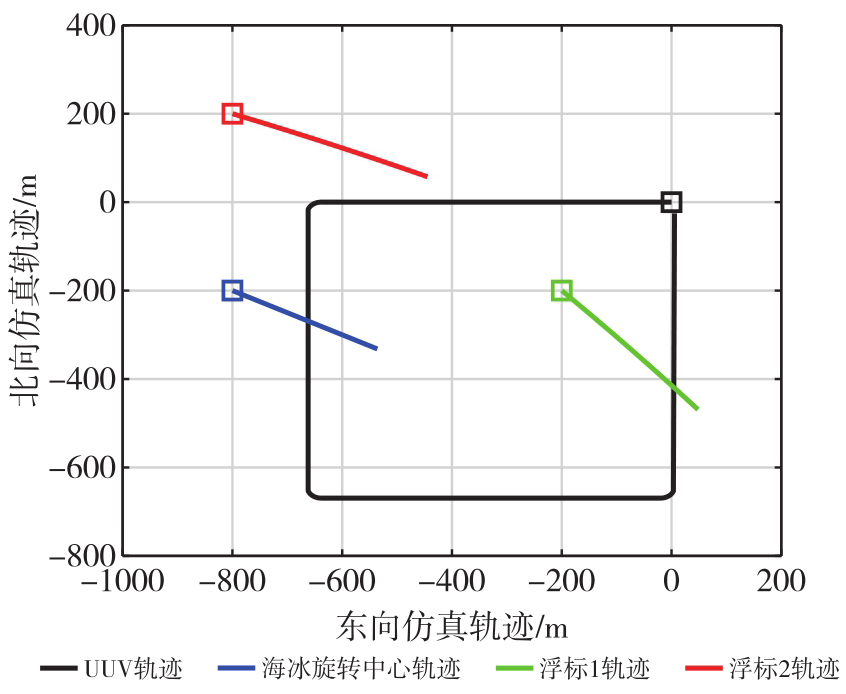
Fig. 8
Dualbuoy-assistedUUVunder-ice positioning results"
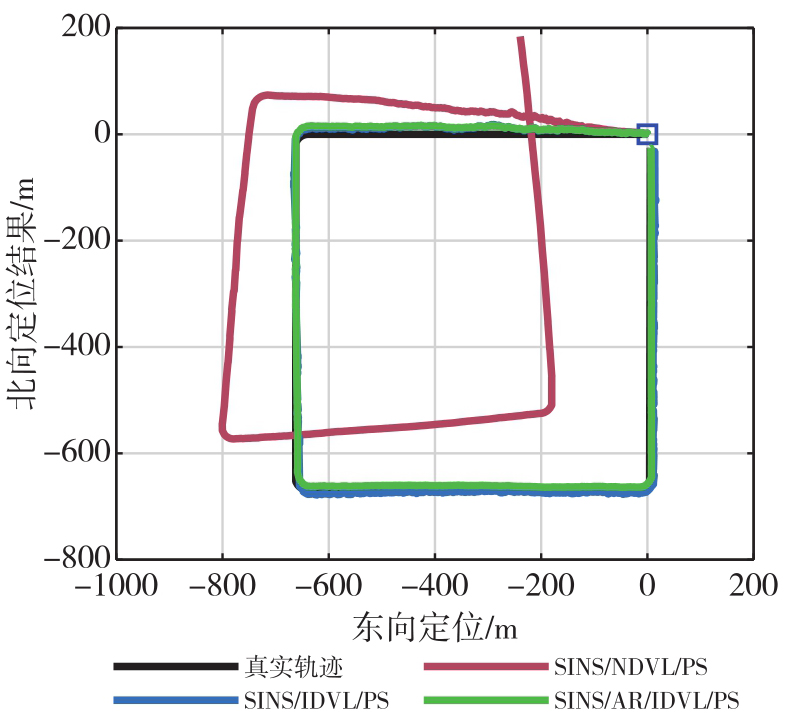
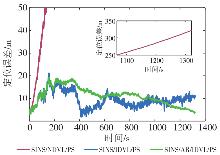
Fig. 9
Dualbuoy-assistedUUVunder-ice positioning error comparison"
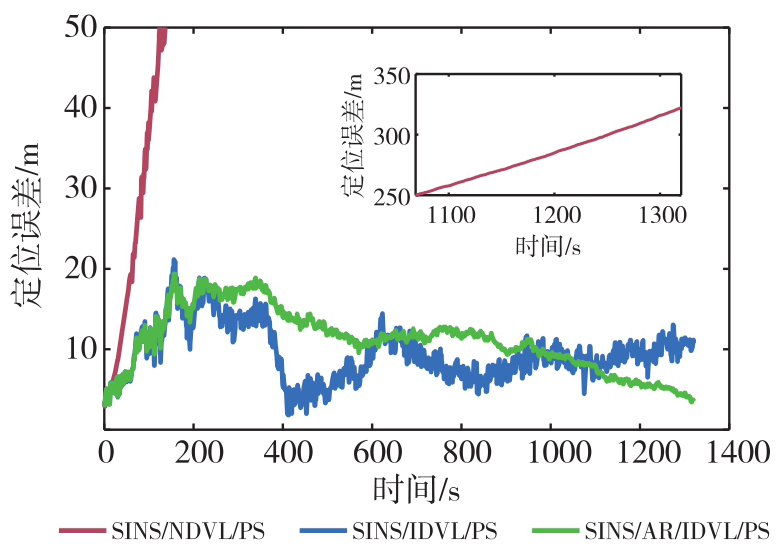

Fig. 10
Sea ice drift parameter estimation results of dual buoy positioning"
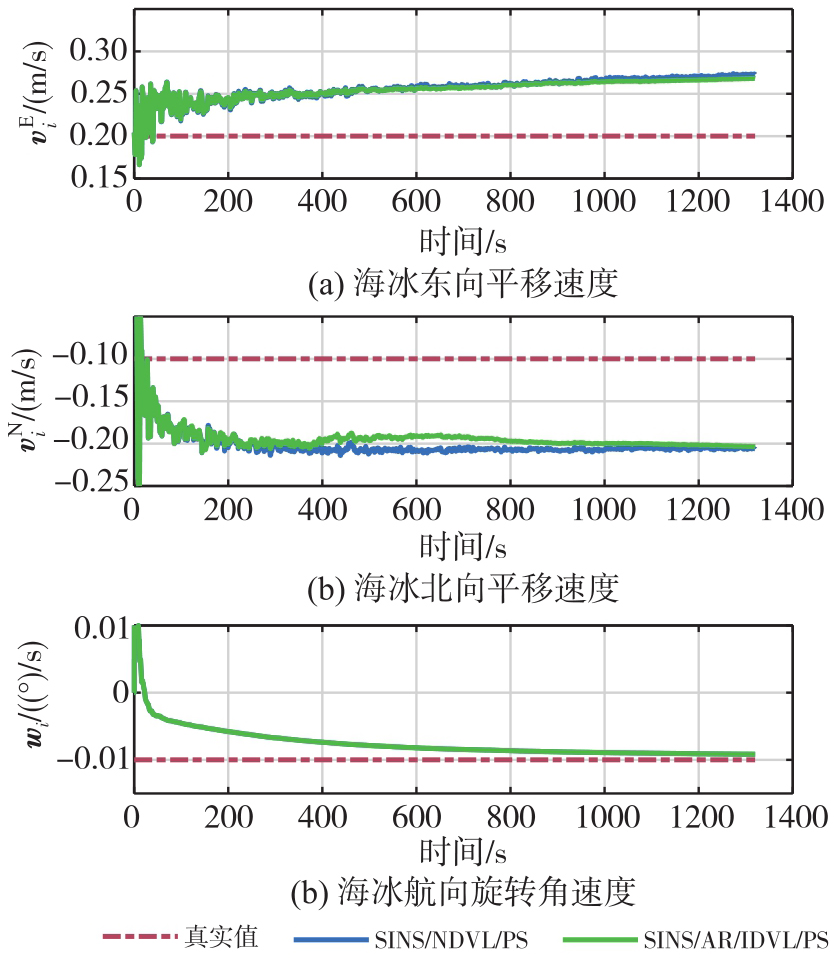
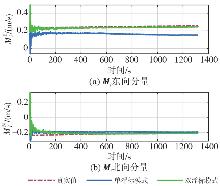
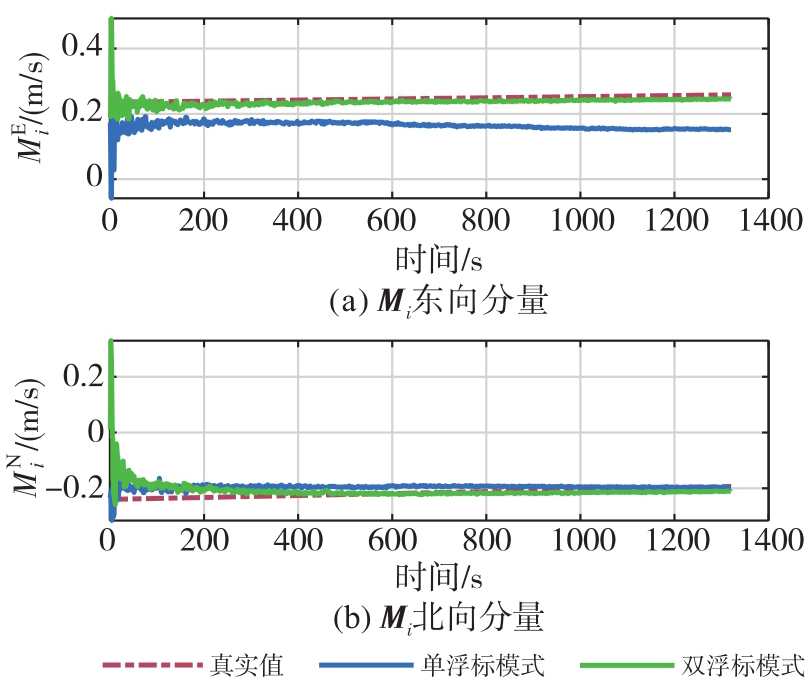
Fig. 11
Mi calculation results comparison under different modes"
| [1] | SCAMBOS T, BELL R, ALLEY R, et al. How much, how fast? A science review and outlook for research on the instability of Antarctica's Thwaites Glacier in the 21st century[J]. Global and Planetary Change, 2017, 153: 16-34. |
| [2] | BERKMAN P, VYLEGZHANIN A. Environmental security in the Arctic Ocean[M]. Dordrecht: Springer Netherlands, 2013. |
| [3] | 何在民, 程昊威, 肖恭伟, 等. 基于改进的Sage-Husa自适应滤波GNSS/INS组合导航算法[J]. 西安邮电大学学报, 2025, 30(05): 22-30. |
| HE Zaimin, CHENG Haowei, XIAO Gongwei, et al. GNSS/INS integrated navigation algorithm based on improved Sage-Husa adaptive filtering[J]. Journal of Xi'an University of Posts and Telecommunications, 2025, 30(5): 22-30. | |
| [4] | 陈驰, 吴刚, 贾洞洞, 等. 科考型自主无人潜航器在极地的应用以及未来发展趋势[J]. 船舶, 2024, 35(1): 59-69. |
| CHEN Chi, WU Gang, JIA Dongdong, et al. Application and future development of scientific research autonomous underwater vehicles in polar regions[J]. Ship & Boat, 2024, 35(1): 59-69. | |
| [5] | DUTRIEUX P, JENKINS A, NICHOLLS K. Ice-shelf basal morphology from an upward-looking multibeam system deployed from an autonomous underwater vehicle[J]. Geological Society, London, Memoirs, 2016, 46(1): 219-220. |
| [6] | WADHAMS P, WILKINSON J, MCPHAIL S. A new view of the underside of Arctic sea ice[J]. Geophysical Research Letters, 2006, 33(4): 2005GL025131. |
| [7] | NICHOLLS K, ABRAHAMSEN E, BUCK J, et al. Measurements beneath an Antarctic ice shelf using an autonomous underwater vehicle[J]. Geophysical Research Letters, 2006, 33(8): 2006GL025998. |
| [8] | JENKINS A, DUTRIEUX P, JACOBS S, et al. Observations beneath Pine Island Glacier in West Antarctica and implications for its retreat[J]. Nature Geoscience, 2010, 3(7): 468-472. |
| [9] | BANDARA D, LEONG Z, NGUYEN H, et al. Technologies for under-ice AUV navigation[C]//Proceedings of 2016 IEEE/OES Autonomous Underwater Vehicles. Tokyo: IEEE, 2016: 108-114. |
| [10] | TAL A, KLEIN I, KATZ R. Inertial navigation system/doppler velocity log (INS/DVL) fusion with partial DVL measurements[J]. Sensors, 2017, 17(2): 415. |
| [11] | THORLEIFSON J, DAVIES T, BLACK M, et al. The theseus autonomous underwater vehicle. A canadian success story[C]//Proceedings of 1997 MTS/IEEE Oceans. Halifax: IEEE, 1997: 1001-1006. |
| [12] | FERGUSON J, POPE A, BUTLER B, et al. Theseus AUV-two record breaking missions[J]. Sea Technology Magazine, 1999, 40(2): 65-70. |
| [13] | KAMINSKI C, CREES T, FERGUSON J, et al. 12 days under ice—an historic AUV deployment in the Canadian High Arctic[C]//Proceedings of 2010 IEEE/OES Autonomous Underwater Vehicles. Monterey: IEEE, 2010: 1-11. |
| [14] | CREES T, KAMINSKI C, FERGUSON J, et al. UNCLOS under ice survey-an historic AUV deployment in the Canadian high arctic[C]//Proceedings of 2010 MTS/IEEE Oceans. Seattle: IEEE, 2010: 1-8. |
| [15] | BOWEN A, YOERGER D, GERMAN C, et al. Design of Nereid-UI: a remotely operated underwater vehicle for oceanographic access under ice[C]//Proceedings of 2014 IEEE Oceans. St. John's: IEEE, 2014: 1-6. |
| [16] | YEO R. Surveying the underside of an Arctic ice ridge using a man-portable GAVIA AUV deployed through the ice[C]//Proceedings of 2007 IEEE Oceans. Vancouver: IEEE, 2007: 1-8. |
| [17] | KIMURA N, TATEYAMA K, SATO K, et al. Unusual drift behaviour of multi-year sea ice in the beaufort sea during summer 2018[J]. Polar Research, 2020, 39(0): 3617. |
| [18] | WANG X, CHEN Z, FANG Y, et al. An improvement in accuracy and spatial resolution of the pattern-matching sea ice drift from SAR imagery[J]. International Journal of Digital Earth, 2023, 16(2): 4073-4094. |
| [19] | BARKER L, WHITCOMB L. A preliminary study of ice-relative underwater vehicle navigation beneath moving sea ice[C]//Proceedings of 2018 IEEE International Conference on Robotics and Automation. Brisbane: IEEE, 2018: 7484-7491. |
| [20] | BARKER L, JAKUBA M, BOWEN A, et al. Scientific challenges and present capabilities in underwater robotic vehicle design and navigation for oceanographic exploration under-ice[J]. Remote Sensing, 2020, 12(16): 2588. |
| [21] | BARKER L, WHITCOMB L. Preliminary simulation of a deployable GPS navigation system for ice-relative dead reckoning of underwater vehicles under moving sea ice[C]//Proceedings of 2016 MTS/IEEE Oceans. Monterey: IEEE, 2016: 1-4. |
| [22] | MCFARLAND C, JAKUBA M, SUMAN S, et al. Toward ice-relative navigation of underwater robotic vehicles under moving sea ice: experimental evaluation in the Arctic sea[C]//Proceedings of 2015 IEEE International Conference on Robotics and Automation. Seattle: IEEE, 2015: 1527-1534. |
| [23] | HWANG J, FAN S, KING P, et al. Development of error reduction model using Bayesian filter for AUV navigating under moving ice[C]//Proceedings of 2018 IEEE/OES Autonomous Underwater Vehicle Workshop. Porto: IEEE, 2018: 1-6. |
| [24] | 郭井学, 孙波, 李群, 等. 极地海冰浮标的现状与应用综述[J]. 极地研究, 2011, 23(2): 149-157. |
| GUO Jingxue, SUN Bo, LI Qun, et al. Application and development of the buoys based on polar sea ice[J]. Chinese Journal of Polar Research, 2011, 23(2): 149-157. | |
| [25] | WEBSTER S, FREITAG L, LEE C, et al. Towards real-time under-ice acoustic navigation at mesoscale ranges[C]//Proceedings of 2015 IEEE International Conference on Robotics and Automation. Seattle: IEEE, 2015: 537-544. |
| [26] | HEGRENÆS Ø, WALLACE C, BØRHAUG E. Autonomous under-ice surveying using the MUNIN AUV and single-transponder navigation[C]//Proceedings of 2017 IEEE Oceans. Anchorage: IEEE, 2017: 1-10. |
| [27] | 田瑞菊. 基于单信标测距的极地AUV冰下导航方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2022. |
| TIAN Ruiju. Research on polar AUV under ice navigation method based on range measurements from a single beacon[D]. Harbin: Harbin Engineering University, 2022. | |
| [28] | 王文平. 水声测距辅助的极地AUV导航方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2024. |
| WANG Wenping. Research on polar AUV navigation aided by underwater acoustic ranging[D]. Harbin: Harbin Engineering University, 2024. | |
| [29] | 程驰宇, 郑翠娥, 张居成, 等. 极地冰下声学定位导航技术现状及发展趋势[J]. 导航与控制, 2024, 23(Z1): 15-24. |
| CHENG Chiyu, ZHENG Cui'e, ZHANG Jucheng, et al. Research status and development trend of polar under-ice acoustic positioning and navigation technology[J]. Navigation and Control, 2024, 23(Z1): 15-24. | |
| [30] | BIAN Y, LI R, WANG G, et al. Tightly coupled information fusion for SINS/DVL/USBL integrated navigation of UUV[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 1-13. |
| [31] | BARKER L, WHITCOMB L. Performance analysis of ice-relative upward-looking Doppler navigation of underwater vehicles beneath moving sea ice[J]. Journal of Marine Science and Engineering, 2021, 9(2): 174-196. |
| [32] | JIN K, CHAI H, SU C, et al. A compensation algorithm with motion constraint in DVL/SINS tightly coupled positioning[J]. Marine Geodesy, 2022, 45(4): 380-406. |
| [1] | Lei LIANG, Changqing WANG, Lingyong HUANG, Zhiyong HUANG, Yaoyao YU, Min ZHONG, Yihao YAN, Qinglu MU. GRACE-FO attitude data determination with consideration of star camera alignment matrix calibration [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(2): 287-300. |
| [2] | Cong SHEN, Guocheng WANG, Lintao LIU, Huiwen HU, Zhiwu CAI. Kalman filter-based satellite clock bias prediction algorithm with frequency difference estimation correction [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(9): 1596-1607. |
| [3] | Weitong WU, Chi CHEN, Bisheng YANG, Xiufeng HE. Robust multi-sensor fusion-based odometry method of LiDAR, millimeter-wave radar and IMU in degraded scenes [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(9): 1677-1686. |
| [4] | Kefan SHAO, Zengke LI, Meng SUN, Zhenbin LIU, Qi WU. A geomagnetic SLAM method enhanced by multi-source data fusion based on smartphones [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1812-1825. |
| [5] | Gen LI, Hongzhou CHAI, Kaidi JIN, Zhao ZHAN. Underwater terrain matching method based on robust particle filter [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(10): 1841-1851. |
| [6] | SUN Chuanmeng, WEI Yu, LI Xinyu, MA Tiehua, WU Zhibo. Intelligent detection method of image water level inversion for water level without water scale in complex scenes [J]. Acta Geodaetica et Cartographica Sinica, 2024, 53(3): 558-568. |
| [7] | WANG Junsen, JIN Shaohua, BIAN Gang, CUI Yang, LONG Zhenyu. A multi-beam outlier automatic filtering algorithm combining uncertainty and density clustering method [J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(10): 1669-1678. |
| [8] | LI Bofeng, QIN Yuanyang, CHEN Guang'e. BDS-3 cycle slip and data gap repair based on the geometry-free ionosphere-filter model [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(4): 501-510. |
| [9] | ZHAO Leyang, YAN Li. Advanced quaternion unscented Kalman filter based on SLAM of mobile robot pose estimation [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(2): 212-223. |
| [10] | SHI Qiang, DAI Wujiao, YAN Huineng, LIU Ning. Research on application of spatio-temporal Kalman filter in deformation analysis [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(10): 2125-2138. |
| [11] | JIN Kaidi, CHAI Hongzhou, SU Chuhan, XIANG Minzhi. Adaptive Kalman filter method with colored noise for fiber optic gyroscope random drift [J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(1): 80-86. |
| [12] | ZHUANG Hanyang, WANG Xiaoliang, WANG Chunxiang, YANG Ming. Vehicle tracking enhancement based on the lane orientation priori from digital maps [J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1522-1533. |
| [13] | XIE Xianming, SUN Yuzheng, LIANG Xiaoxing, ZENG Qingning, ZHENG Zhanheng. Recursive estimation method of cubature Kalman filtering local polynomial coefficients for phase unwrapping [J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(8): 1023-1031. |
| [14] | JIA Song, XU Tianhe, YANG Honglei. Two Improved Algorithms for LS+AR Prediction Model of the Polar Motion [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(S0): 71-77. |
| [15] | DI Kaichang, WAN Wenhui, ZHAO Hongying, LIU Zhaoqin, WANG Runzhi, ZHANG Feizhou. Progress and Applications of Visual SLAM [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(6): 770-779. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||