

Acta Geodaetica et Cartographica Sinica ›› 2026, Vol. 55 ›› Issue (1): 59-72.doi: 10.11947/j.AGCS.2026.20250033
• Geodesy and Navigation • Previous Articles Next Articles
Deying YU1( ), Houpu LI1(), Yi LIU2, Shuguang WU1, Deyan LI1, Mingchao LI3, Wenkui LI1, Shaofeng BIAN1
), Houpu LI1(), Yi LIU2, Shuguang WU1, Deyan LI1, Mingchao LI3, Wenkui LI1, Shaofeng BIAN1
Received:2025-01-20
Revised:2026-01-13
Online:2026-02-13
Published:2026-02-13
Contact:
Houpu LI
E-mail:20500601@nue.edu.cn;1210051025@nue.edu.cn
About author:YU Deying (1998—), male, PhD, majors in satellite radio navigation technology and its applications. E-mail: 20500601@nue.edu.cn
Supported by:CLC Number:
Deying YU, Houpu LI, Yi LIU, Shuguang WU, Deyan LI, Mingchao LI, Wenkui LI, Shaofeng BIAN. A DBSCAN-based RAIM algorithm for multiple gross error identification[J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(1): 59-72.
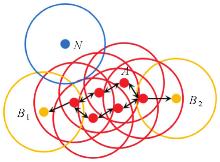
Fig. 1
Principles of DBSCAN algorithm"
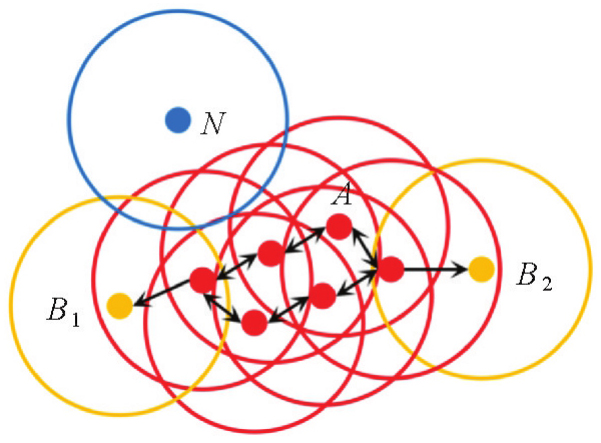
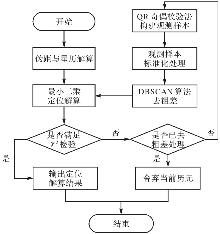
Fig. 2
Flowchart of RAIM algorithm for multiple gross error detection based on DBSCAN"
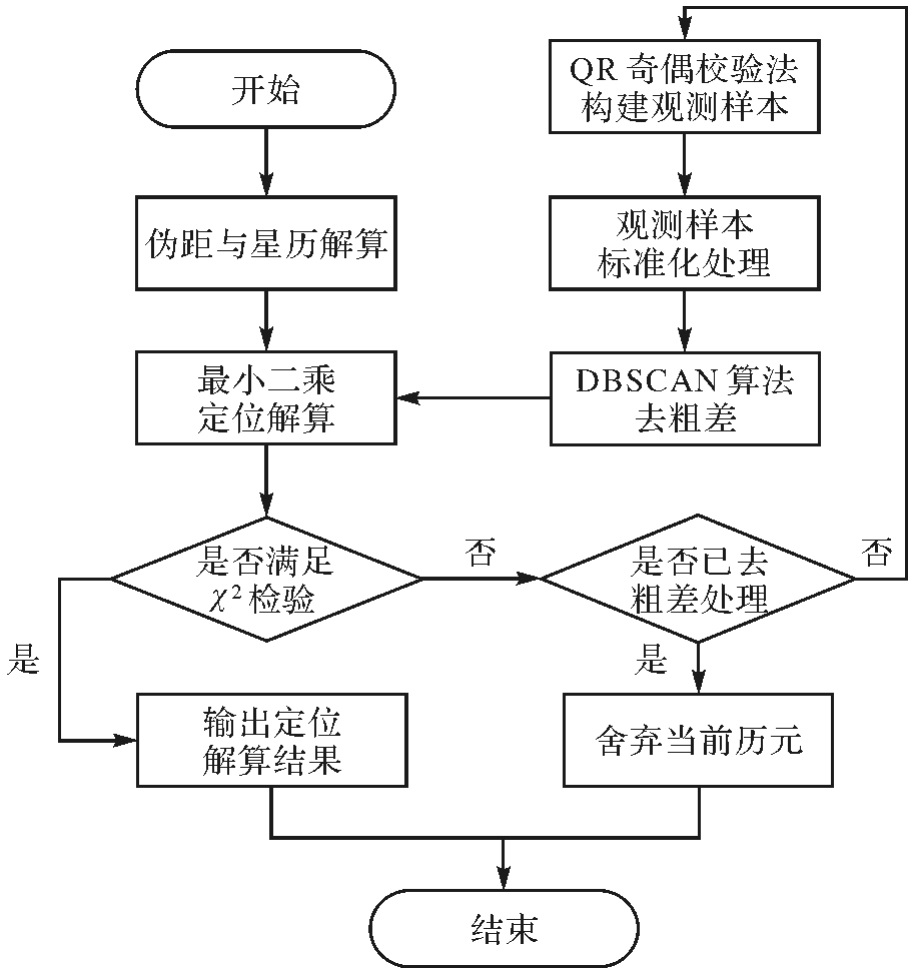
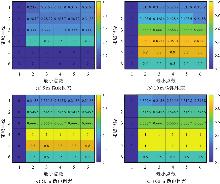
Fig. 3
Heatmap of F1 score for different DBSCAN parameter combinations"
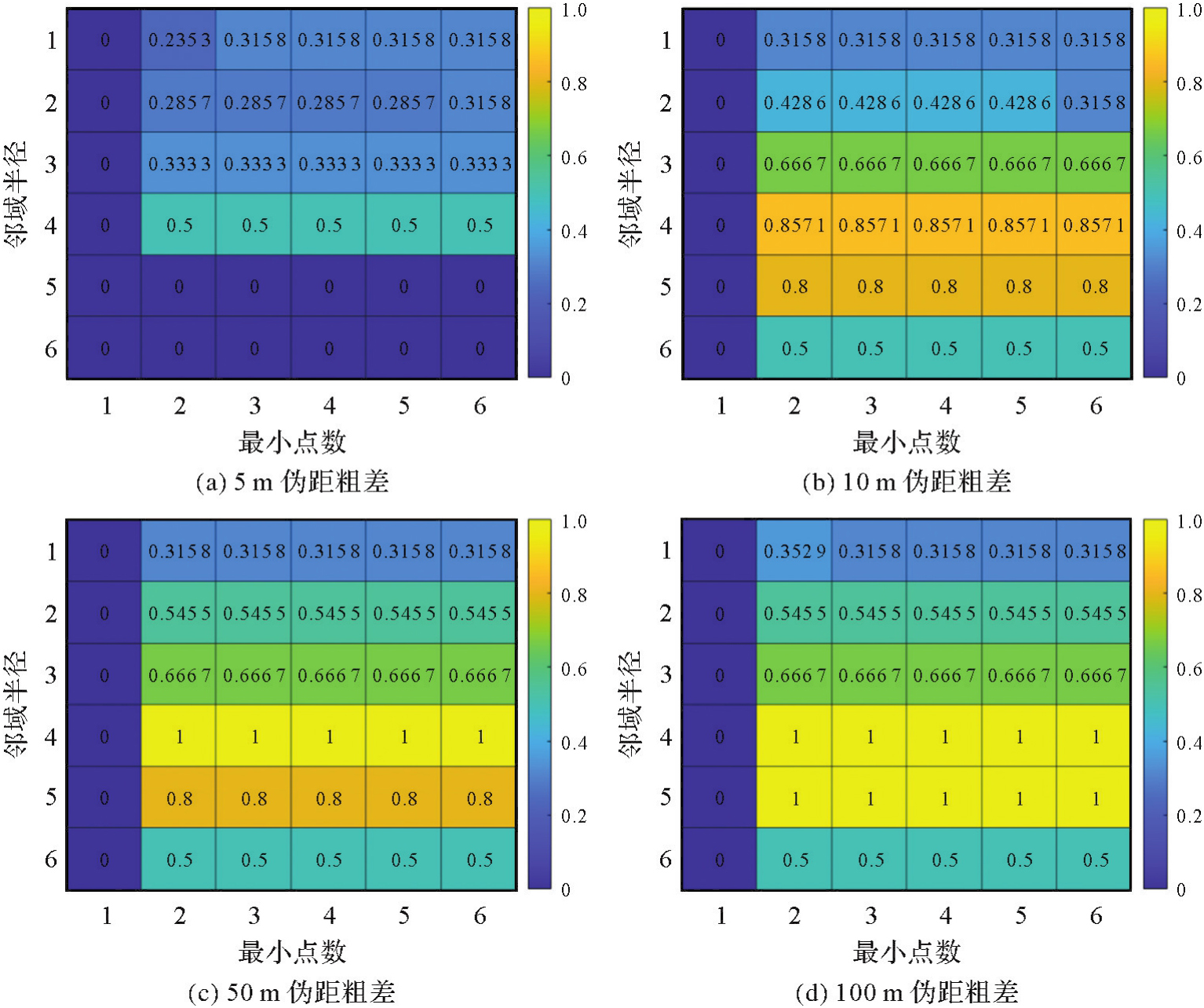

Fig. 4
Euclidean distances between shipborne observation samples"


Fig. 5
Euclidean distances between airborne observation samples"


Fig. 6
Pseudo-range single-point positioning error time series"
Tab. 1
Pseudo-range single-point positioning errors"
| 系统 | 伪距粗差 | RAIM算法 | X | Y | Z | |||
|---|---|---|---|---|---|---|---|---|
| RMS | STD | RMS | STD | RMS | STD | |||
| GPS/Galileo | 50 | LSR | 15.52 | 3.37 | 13.40 | 7.48 | 3.20 | 2.99 |
| RANSAC | 3.53 | 3.53 | 2.46 | 2.46 | 2.05 | 2.05 | ||
| DBSCAN | 3.56 | 3.55 | 2.54 | 2.53 | 2.03 | 2.03 | ||
| 100 | LSR | 30.68 | 3.71 | 28.63 | 12.31 | 5.37 | 4.23 | |
| RANSAC | 3.64 | 3.64 | 2.45 | 2.45 | 1.92 | 1.92 | ||
| DBSCAN | 3.64 | 3.64 | 2.45 | 2.45 | 1.92 | 1.92 | ||
| GPS/Galileo/BDS | 50 | LSR | 14.19 | 3.64 | 25.93 | 2.35 | 14.49 | 2.34 |
| RANSAC | 3.55 | 3.55 | 2.69 | 2.69 | 2.19 | 2.19 | ||
| DBSCAN | 4.69 | 4.63 | 4.75 | 4.68 | 2.65 | 2.65 | ||
| 100 | LSR | 27.33 | 3.55 | 51.95 | 2.28 | 29.06 | 2.41 | |
| RANSAC | 3.59 | 3.59 | 2.70 | 2.70 | 2.14 | 2.14 | ||
| DBSCAN | 3.59 | 3.59 | 2.70 | 2.70 | 2.14 | 2.14 | ||
Tab. 2
Operation time consumption"
| 系统 | 伪距粗差/m | 运行耗时/s | DBSCAN RAIM效率提升/(%) | |||
|---|---|---|---|---|---|---|
| LSR RAIM | RANSAC RAIM | DBSCAN RAIM | LSR RAIM | RANSAC RAIM | ||
| GPS/Galileo | 50 | 0.626 9 | 5.707 3 | 0.371 4 | 40.75 | 93.49 |
| 100 | 0.830 4 | 7.552 7 | 0.484 6 | 41.64 | 93.58 | |
| GPS/Galileo/BDS | 50 | 1.044 1 | 9.496 3 | 0.606 5 | 41.91 | 93.61 |
| 100 | 1.248 6 | 11.354 7 | 0.720 3 | 42.32 | 93.66 | |
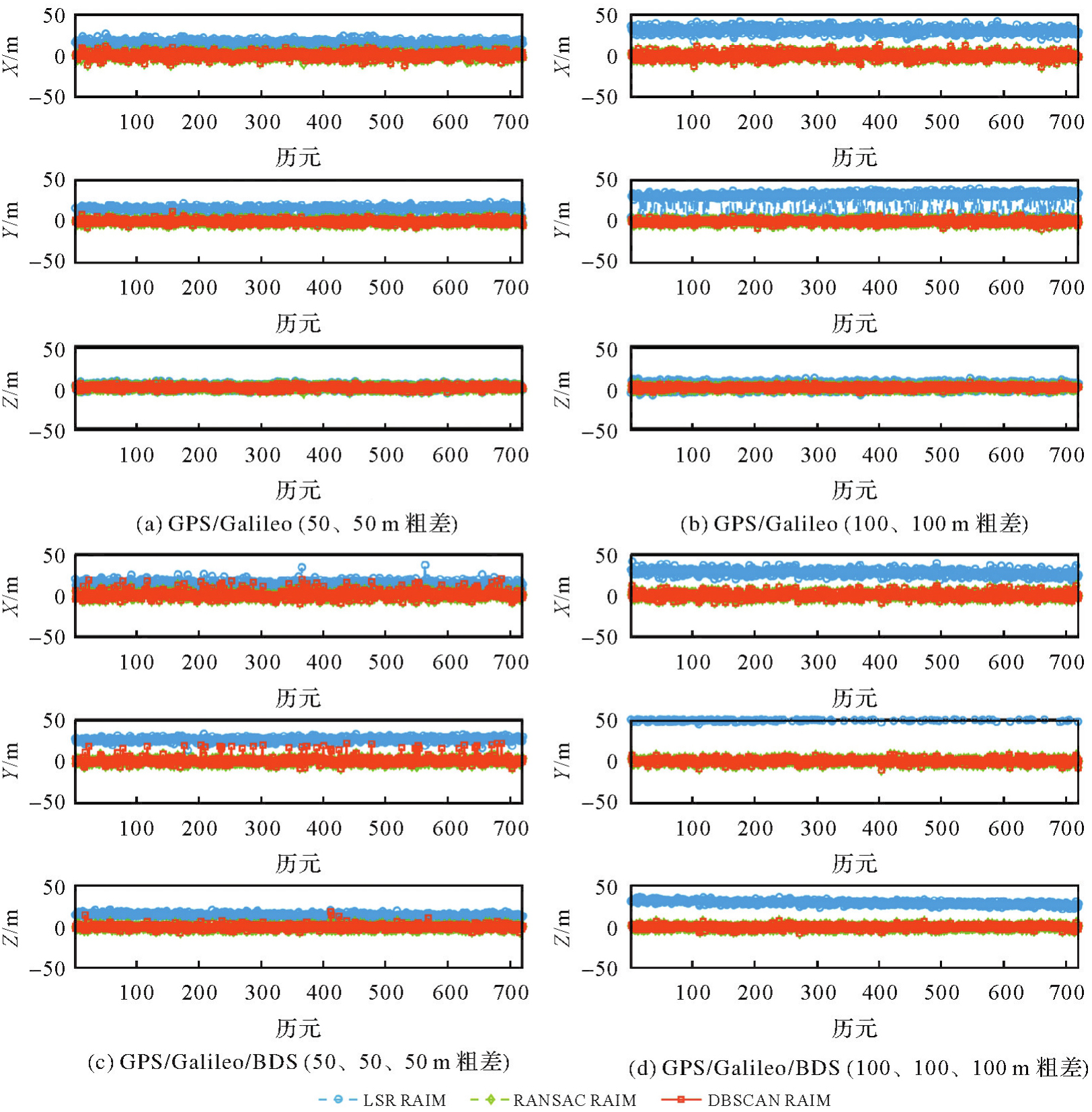
Fig. 7
Performance metrics for gross error identification"

Tab. 3
Gross error identification performance indicators"
| 伪距粗差/m | RAIM算法 | 识别率/(%) | 误检率/(%) | 漏检率/(%) | F1值 |
|---|---|---|---|---|---|
| 5 | LSR | 0 | 0 | 100 | 0 |
| DBSCAN | 52.87 | 18.17 | 47.13 | 0.46 | |
| 10 | LSR | 28.21 | 1.18 | 71.79 | 0.42 |
| DBSCAN | 72.90 | 8.27 | 27.10 | 0.70 | |
| 50 | LSR | 33.33 | 0 | 66.67 | 0.50 |
| DBSCAN | 99.92 | 0.02 | 0.08 | 1 | |
| 100 | LSR | 33.33 | 0 | 66.67 | 0.50 |
| DBSCAN | 100 | 0 | 0 | 1 |

Fig. 8
Pseudo-range single-point positioning error"
Tab. 4
Pseudo-range single-point positioning errors"
| 伪距粗差 | RAIM算法 | X | Y | Z | |||
|---|---|---|---|---|---|---|---|
| RMS | STD | RMS | STD | RMS | STD | ||
| 5 | LSR | 4.49 | 3.21 | 3.35 | 2.06 | 2.34 | 1.96 |
| DBSCAN | 4.42 | 4.08 | 3.20 | 2.64 | 2.57 | 2.38 | |
| 10 | LSR | 7.06 | 3.53 | 5.70 | 2.12 | 3.11 | 1.84 |
| DBSCAN | 4.92 | 4.34 | 4.14 | 3.16 | 2.84 | 2.46 | |
| 50 | LSR | 14.48 | 3.64 | 25.74 | 2.26 | 15.12 | 2.08 |
| DBSCAN | 3.89 | 3.89 | 2.86 | 2.86 | 2.20 | 2.21 | |
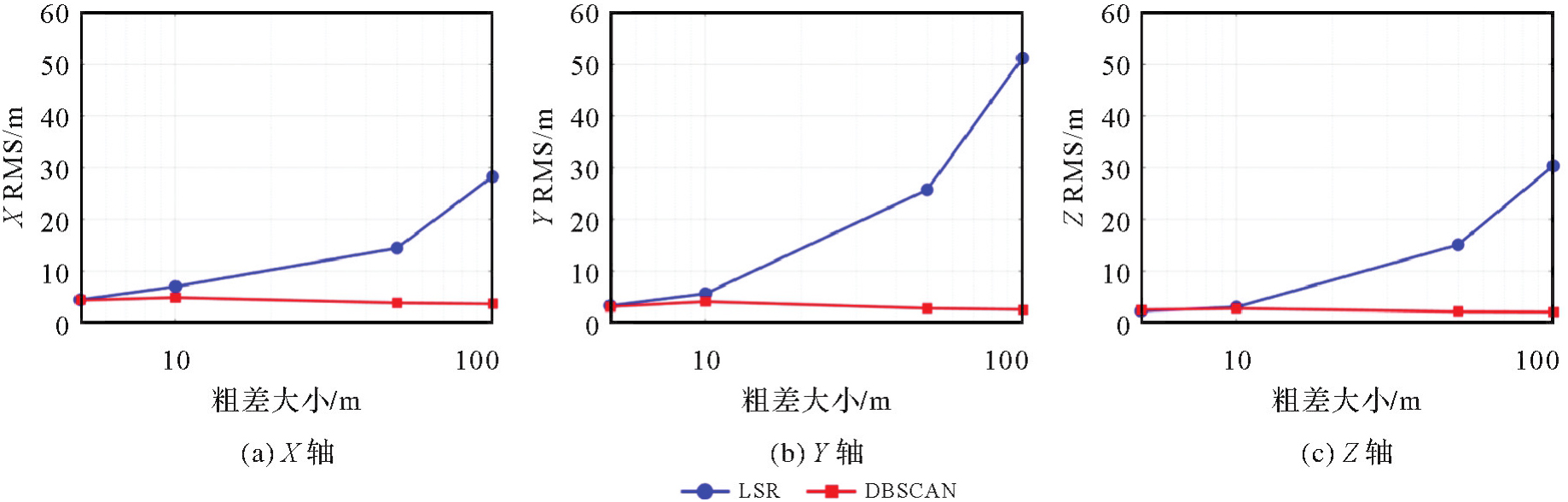
| 100 | LSR | 28.28 | 3.53 | 51.21 | 2.17 | 30.37 | 2.05 |
| DBSCAN | 3.71 | 3.71 | 2.63 | 2.63 | 2.14 | 2.14 | |
Fig. 9
Satellite distribution"
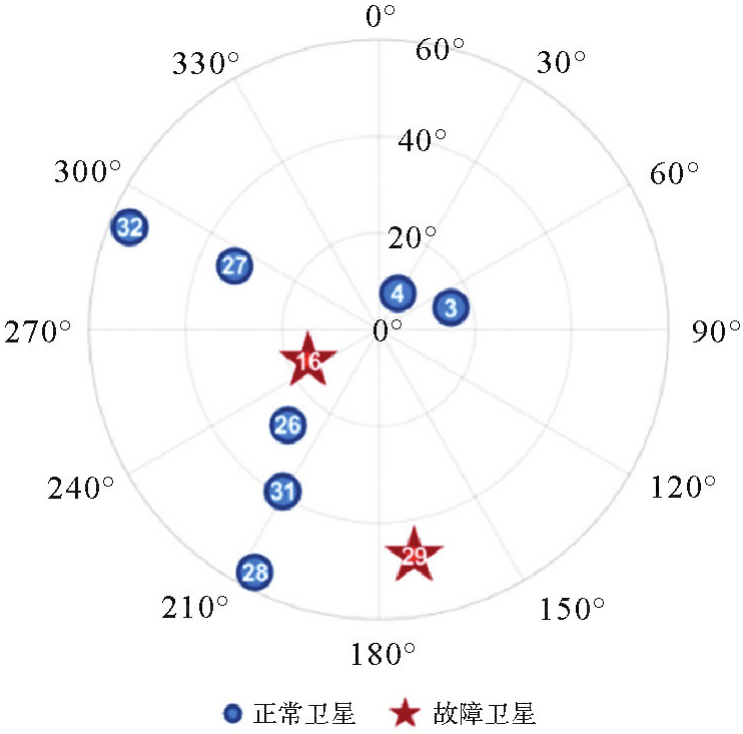
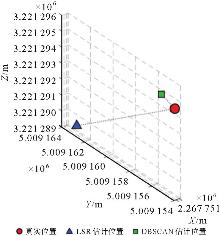
Fig. 10
3D position comparison"

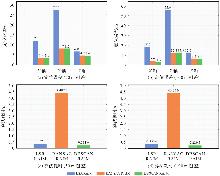
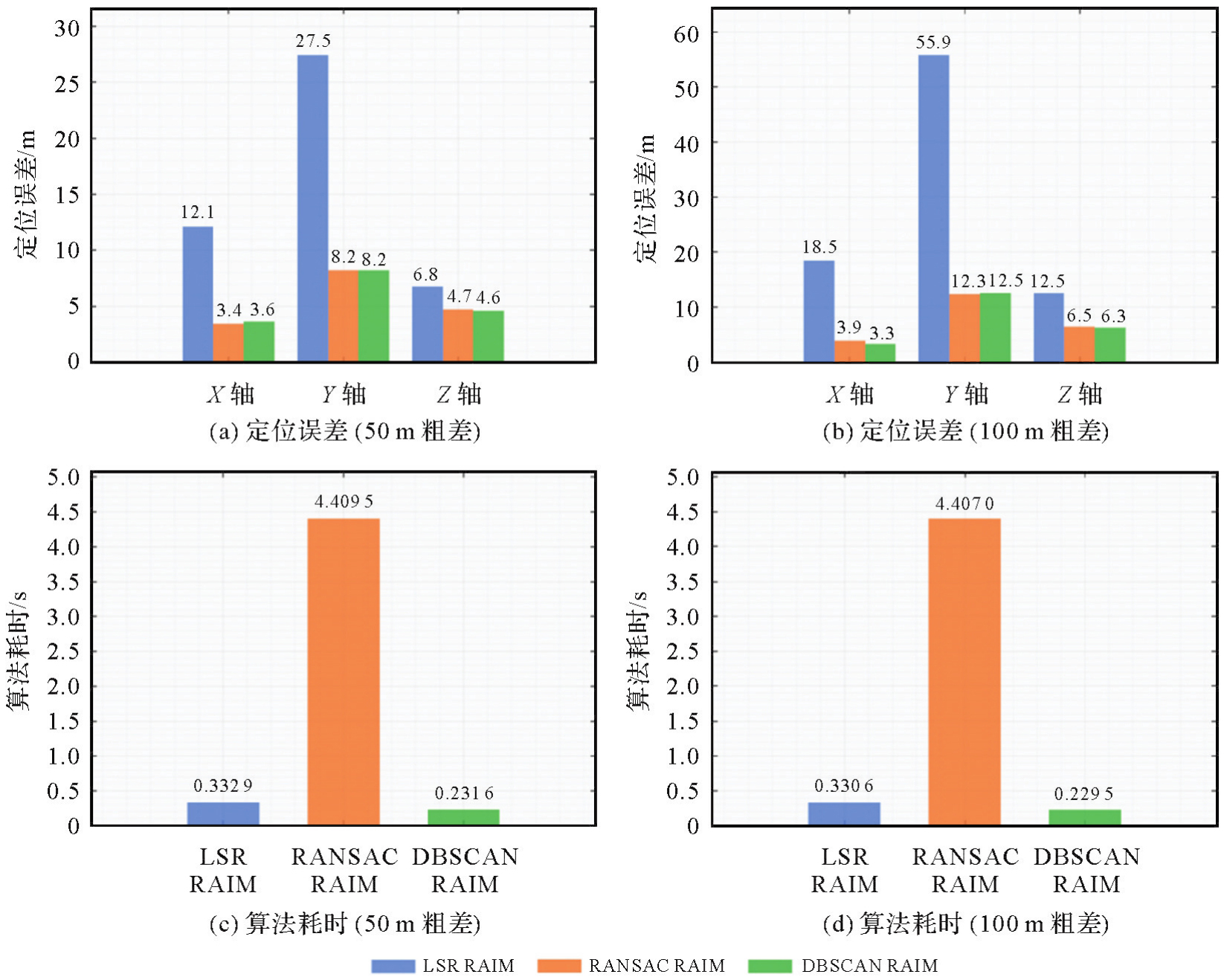
Fig. 11
Performance comparison of different RAIM algorithms"
| [1] | 徐肖豪, 杨传森, 刘瑞华. GNSS用户端自主完好性监测研究综述[J]. 航空学报, 2013, 34(3): 451-463. |
| XU Xiaohao, YANG Chuansen, LIU Ruihua. Review and prospect of GNSS receiver autonomous integrity monitoring[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(3): 451-463. | |
| [2] | YANG Yuanxi, XU Junyi. GNSS receiver autonomous integrity monitoring (RAIM) algorithm based on robust estimation[J]. Geodesy and Geodynamics, 2016, 7(2): 117-123. |
| [3] | 宁津生, 姚宜斌, 张小红. 全球导航卫星系统发展综述[J]. 导航定位学报, 2013, 1(1): 3-8. |
| NING Jinsheng, YAO Yibin, ZHANG Xiaohong. Review of the development of global satellite navigation system[J]. Journal of Navigation and Positioning, 2013, 1(1): 3-8. | |
| [4] | MONTENBRUCK O, STEIGENBERGER P, PRANGE L, et al. The multi-GNSS experiment (MGEX) of the international GNSS service (IGS)-achievements, prospects and challenges[J]. Advances in Space Research, 2017, 59(7): 1671-1697. |
| [5] | 赵昂, 杨元喜, 许扬胤, 等. GNSS单系统及多系统组合完好性分析[J]. 武汉大学学报(信息科学版), 2020, 45(1): 72-80. |
| ZHAO Ang, YANG Yuanxi, XU Yangyin, et al. Integrity analysis of GNSS single system and multi-system combination[J]. Geomatics and Information Science of Wuhan University, 2020, 45(1): 72-80. | |
| [6] | PARKINSON B W, AXELRAD P. Autonomous GPS integrity monitoring using the pseudorange residual[J]. Navigation, 1988, 35(2): 255-274. |
| [7] | STURZA M A. Navigation system integrity monitoring using redundant measurements[J]. Navigation, 1988, 35(4): 483-501. |
| [8] | BLANCH J, WALTER T, ENGE P. RAIM with optimal integrity and continuity allocations under multiple failures[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(3): 1235-1247. |
| [9] | LI Liang, WANG Huan, JIA Chun, et al. Integrity and continuity allocation for the RAIM with multiple constellations[J]. GPS Solutions, 2017, 21(4): 1503-1513. |
| [10] | ZHAI Yawei, JOERGER M, PERVAN B. Fault exclusion in multi-constellation global navigation satellite systems[J]. Journal of Navigation, 2018, 71(6): 1281-1298. |
| [11] | EL-MOWAFY A, IMPARATO D, RIZOS C, et al. On hypothesis testing in RAIM algorithms: generalized likelihood ratio test, solution separation test and a possible alternative[J]. Measurement Science and Technology, 2019, 30(7): 075001. |
| [12] |
张倩倩, 归庆明, 宫轶松. 卫星多故障探测和识别的独立分量分析法[J]. 测绘学报, 2017, 46(6): 698-705. DOI: .
doi: 10.11947/j.AGCS.2017.20160079 |
|
ZHANG Qianqian, GUI Qingming, GONG Yisong. Multiple satellite faults detection and identification based on the independent component analysis[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(6): 698-705. DOI: .
doi: 10.11947/j.AGCS.2017.20160079 |
|
| [13] | 刘一, 谷守周, 边少锋, 等. 一种基于观测数据集密度中心的新型RAIM算法[J]. 武汉大学学报(信息科学版), 2021, 46(12): 1900-1906. |
| LIU Yi, GU Shouzhou, BIAN Shaofeng, et al. A new RAIM algorithm based on the density center of observed dataset[J]. Geomatics and Information Science of Wuhan University, 2021, 46(12): 1900-1906. | |
| [14] | 武明, 许承东, 黄国限, 等. 概率神经网络多历元残差RAIM算法[J]. 系统工程与电子技术, 2023, 45(12): 3967-3974. |
| WU Ming, XU Chengdong, HUANG Guoxian, et al. Probabilistic neural network multi-epoch residual RAIM algorithm[J]. Systems Engineering and Electronics, 2023, 45(12): 3967-3974. | |
| [15] | GE Yishan, WANG Zhipeng, ZHU Yanbo. Reduced ARAIM monitoring subset method based on satellites in different orbital planes[J]. GPS Solutions, 2017, 21(4): 1443-1456. |
| [16] | ZHANG Yabin, WANG Li, FAN Lihong, et al. MHSS ARAIM algorithm combined with gross error detection[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(1): 36-44. |
| [17] | GAO Yuting, GAO Yang, LIU Baoyu, et al. Enhanced fault detection and exclusion based on Kalman filter with colored measurement noise and application to RTK[J]. GPS Solutions, 2021, 25(3): 82. |
| [18] | GAO Zhen, ZHAN Xingqun, YANG Rong. An improved detection method of GNSS faults with fractional information divergence[J]. Advances in Space Research, 2023, 72(10): 4229-4243. |
| [19] | WANG Shizhuang, ZHAI Yawei, CHI Cheng, et al. Implementation and analysis of fault grouping for multi-constellation advanced RAIM[J]. Advances in Space Research, 2023, 71(11): 4765-4786. |
| [20] | HUANG Guoxian, XU Chengdong, ZHENG Xueen. Sequential advanced receiver autonomous integrity monitoring method considering the optimal sample size[J]. Advances in Space Research, 2023, 71(10): 4173-4184. |
| [21] | ANGRISANO A, GAGLIONE S, CROCETTO N, et al. PANG-NAV: a tool for processing GNSS measurements in SPP, including RAIM functionality[J]. GPS Solutions, 2019, 24(1): 19. |
| [22] | TITOUNI S, ROUABAH K, ATIA S, et al. Spectral transformation-based technique for reducing effect of limited pre-correlation bandwidth in the GNSS receiver filter in presence of noise and multipath[J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 252-265. |
| [23] | DUENAS ARANA G, ABDUL HAFEZ O, JOERGER M, et al. Integrity monitoring for Kalman filter-based localization[J]. The International Journal of Robotics Research, 2020, 39(13): 1503-1524. |
| [24] | JIANG Chen, ZHANG Shubi, CAO Yizhi, et al. A robust fault detection algorithm for the GNSS/INS integrated navigation systems[J]. Journal of Geodesy and Geoinformation Science, 2020, 3(1): 12-24. |
| [25] | BHATTACHARYYA S. A computationally efficient Kalman filter-based RAIM algorithm for aircraft navigation with GPS and NavIC[J]. Measurement Science and Technology, 2023, 34(12): 125106. |
| [26] | WU Qi'an. A two-fault detection and elimination approach to the receiver autonomous integrity monitoring[J]. GPS Solutions, 2024, 28(4): 160. |
| [27] | WEN Yaxin, DAI Wujiao, YU Wenkun, et al. Mitigation of multiple outliers using consistency checking for GNSS standard point positioning in urban areas[J]. Advances in Space Research, 2024, 73(3): 1721-1733. |
| [28] | 李瑞杰, 李亮, 蒋家昌, 等. 基于多星最差故障搜索的RAIM完好性风险估计方法[J]. 航空学报, 2024, 45(2): 247-261. |
| LI Ruijie, LI Liang, JIANG Jiachang, et al. RAIM integrity risk estimation method based on worst multi-satellite faults searching[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(2): 247-261. | |
| [29] | ESTER M, KRIEGEL H P, SANDER J, et al. A density-based algorithm for discovering clusters in large spatial databases with noise[C]//Proceedings of the 2nd International Conference on Knowledge Discovery and Data Mining. Portland: ACM Press, 1996: 226-231. |
| [30] | ALSAHFI T. Spatial and temporal analysis of road traffic accidents in major Californian cities using a geographic information system[J]. ISPRS International Journal of Geo-Information, 2024, 13(5): 157. |
| [31] | RINNE T, SAEED M, SERNA-GUERRERO R. Quantifying the degree of selectivity in a flocculation-flotation process of LiCoO2 and graphite using scanning electron microscopy and image processing analysis[J]. Minerals Engineering, 2024, 209: 108644. |
| [32] | SONG Chenyu, CUI Jingyuan, CUI Yafei, et al. Integrated STL-DBSCAN algorithm for online hydrological and water quality monitoring data cleaning[J]. Environmental Modelling & Software, 2025, 183: 106262. |
| [1] | Jinwei BU, Shuhui LIU, Shunshuang XU, Tongsu XIANG, Qiulan WANG, Chaoying JI, Xiaoqing ZUO. Construction of an empirical model for estimating the global wave period of spaceborne GNSS-R [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(4): 684-697. |
| [2] | Tangting WU, Xinyu LUO, Liguo LU, Zhanke LIU, Nengfang CHAO. Assessment of water resource changes and drought characteristics in the Shaanxi, Gansu and Ningxia region based on GNSS and GRACE/GRACE-FO [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 439-450. |
| [3] | Zhongmin MA, Shuangcheng ZHANG, Xin ZHOU, Qi LIU, Ning LIU, Hengli WANG. A flood monitoring method using FY-3 GNSS-R accounting for surface reflectivity uncertainty: a case study of the August 2 Guangdong rainstorm disaster [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(3): 451-464. |
| [4] | Qingyun YAN, Zixuan GUO, Yuanjin PAN, Yan JIA, Shuanggen JIN. Quantitative driving factors and zoning patterns of GNSS-R land surface reflectivity spatial heterogeneity [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(2): 315-327. |
| [5] | Qingzhi ZHAO, Duoduo JIANG, Yibin YAO, Zhi MA, Yongjie MA, Haojie LI, Ruirui XUE. An adaptive method for selecting the optimal GNSS satellite signal for water vapor tomography [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(1): 25-35. |
| [6] | Dongliang CHENG, Lingqiu CHEN, Zhiyong HUANG, Shubo QIAO, Dandan WANG, Yaming YAN. Performance evaluation of COATS-based multi-mode and multi-frequency iGNSS-R altimetry [J]. Acta Geodaetica et Cartographica Sinica, 2026, 55(1): 73-89. |
| [7] | Yarong LUO, Wentao LU, Chi GUO, Jingnan LIU. Left-handed symmetry equivariant filtering model and algorithm for GNSS/INS integrated navigation [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(8): 1389-1403. |
| [8] | Yangyi CHEN, Kai ZHENG, Xiaohong ZHANG, Mingkui WU, Pengxu WANG, Wenju FU, Kezhong LIU. GPS/Galileo/BDS overlapping frequencies multipath error analysis and modeling [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(8): 1427-1438. |
| [9] | Jianzhang LI, Haowen YAN, Weifang YANG, Xiaoning SU. GNSS pseudo trigonometric leveling method [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1170-1177. |
| [10] | Qingzhi ZHAO, Lulu CHANG, Yibin YAO, Haojie LI. A method for constructing a hydrological drought index integrated with GNSS and meteorological data [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(7): 1192-1205. |
| [11] | Qianxin WANG, Chao HU, Tong CHENG. A method for satellite ultra-rapid orbit and clock offset estimation based on the prior information of the GNSS clock parameters [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(6): 982-994. |
| [12] | Yang SHEN, Guangyun LI, Mingjian CHEN, Linyang LI, Xingyu SHI, Wei CAI, Weifeng HAO. Assessment of GNSS ionosphere models based on FY-3 TEC in polar regions [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(6): 995-1008. |
| [13] | Shunqiang HU, Kejie CHEN, Xiaoxing HE, Hai ZHU, Tan WANG. The impact of environmental loading on nonlinear variations of 3D coordinate time series of GNSS stations in Sichuan and Yunnan region [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(5): 805-818. |
| [14] | Wentao YANG, Fei GUO, Xiaohong ZHANG, Zhiyu ZHANG, Yifan ZHU, Zheng LI, Ziheng WU. Soil moisture and freeze-thaw map using GNSS reflectometer and SMAP radiometer for Qinghai-Xizang Plateau [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(4): 725-735. |
| [15] | Qingzhi ZHAO, Duoduo JIANG, Hongwu GUO, Zufeng LI, Chen LIU, Yibin YAO. A general method for determining the key parameters of GNSS water vapor tomography modeling [J]. Acta Geodaetica et Cartographica Sinica, 2025, 54(3): 410-421. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||